Изобретение относится к области измерительной техники, в частности, к средствам определения координат подвижного объекта, и может быть использовано в системах посадки летательных аппаратов, в строительстве для направленного бурения скважин, в системах навигации подвижных объектов, в медицине для сверхточного позиционирования и других областях науки и техники. Технология определения координат подвижного объекта в искусственном магнитном поле заключается в генерации в зоне движения объекта магнитного поля с известными пространственными и временными зависимостями, измерении характеристик этого поля, например, с использованием магнитометрических датчиков, и вычислении координат подвижного объекта [Желамский М.В. Электромагнитное позиционирование подвижных объектов. - М.: ФИЗМАТЛИТ, 2013, с. 7]
Наиболее близким к заявляемому устройству является устройство определения координат [Shuang Song, Chao Ни, Ваори Li, Xiaoxiao Li, Max Q.-H. Meng An Electromagnetic localization and orientation method based on rotating magnetic dipole // IEEE Transactions on magnetics, Vol. 49, №3, march 2013. - P. 1274-1277], состоящее из источника магнитного поля, создаваемого двумя катушками индуктивности, расположенными взаимно перпендикулярно, подключенными к источнику тока со сдвигом фаз  друг относительно друга. Создаваемое магнитное поле эквивалентно полю вращающегося магнитного диполя. Измерительное устройство состоит из трех ортогональных магнитометрических датчиков, расположенных на подвижном объекте. Измерительное устройство соединено с блоком измерения амплитуд и блоком измерения разности фаз, которые соединены с блоком определения координат. Для измерения начальных фаз используется метод фазовой синхронизации источника магнитного поля и приемника. Синхронизация достигается путем передачи опорного сигнала, формируемого наземной аппаратурой, по проводному каналу связи. Недостатком этого устройства является узкая область применения, связанная с наличием проводного канала связи.
друг относительно друга. Создаваемое магнитное поле эквивалентно полю вращающегося магнитного диполя. Измерительное устройство состоит из трех ортогональных магнитометрических датчиков, расположенных на подвижном объекте. Измерительное устройство соединено с блоком измерения амплитуд и блоком измерения разности фаз, которые соединены с блоком определения координат. Для измерения начальных фаз используется метод фазовой синхронизации источника магнитного поля и приемника. Синхронизация достигается путем передачи опорного сигнала, формируемого наземной аппаратурой, по проводному каналу связи. Недостатком этого устройства является узкая область применения, связанная с наличием проводного канала связи.
Технический результат, обеспечиваемый изобретением, выражается в расширении функциональных возможностей устройства. В частности, устройство позволяет решать навигационные задачи для удаленного подвижного объекта.
Технический результат достигается тем, что устройство для определения координат подвижного объекта, состоит из наземной аппаратуры в составе генератора магнитного поля, состоящего из источника гармонического сигнала и двух взаимно перпендикулярных катушек индуктивности, выход источника гармонического сигнала с первой катушкой индуктивности через фазовращатель на  и бортовой аппаратуры в составе измерительного устройства, блока измерения амплитуды, блока измерения разности фаз и блока вычисления координат, выход которого является выходом устройства, при этом выход блока измерения амплитуды и выход блока измерения разности фаз соединены с первым и вторым входами блока вычисления координат соответственно, согласно изобретению, в наземную аппаратуру дополнительно введены последовательно соединенные блок управления и первая ключевая схема, выход которой соединен со второй катушкой индуктивности, выход источника гармонического сигнала соединен со входом первой ключевой схемы, в бортовую аппаратуру введены последовательно соединенные блок определения режима работы наземной аппаратуры, вторая ключевая схема и генератор опорного сигнала, выход которого соединен со вторым входом блока определения разности фаз, а также третья и четвертая ключевые схемы, первые входы которых объединены со входом блока определения режимов работы наземной аппаратуры и вторым входом второй ключевой схемы и соединены с выходом измерительного устройства, вторые входы третьей и четвертой ключевых схем соединены со вторым выходом блока определения режима работы наземной аппаратуры, выходы третьей и четвертой ключевых схем соединены соответственно со входом блока измерения амплитуд и вторым входом блока измерения разности фаз.
и бортовой аппаратуры в составе измерительного устройства, блока измерения амплитуды, блока измерения разности фаз и блока вычисления координат, выход которого является выходом устройства, при этом выход блока измерения амплитуды и выход блока измерения разности фаз соединены с первым и вторым входами блока вычисления координат соответственно, согласно изобретению, в наземную аппаратуру дополнительно введены последовательно соединенные блок управления и первая ключевая схема, выход которой соединен со второй катушкой индуктивности, выход источника гармонического сигнала соединен со входом первой ключевой схемы, в бортовую аппаратуру введены последовательно соединенные блок определения режима работы наземной аппаратуры, вторая ключевая схема и генератор опорного сигнала, выход которого соединен со вторым входом блока определения разности фаз, а также третья и четвертая ключевые схемы, первые входы которых объединены со входом блока определения режимов работы наземной аппаратуры и вторым входом второй ключевой схемы и соединены с выходом измерительного устройства, вторые входы третьей и четвертой ключевых схем соединены со вторым выходом блока определения режима работы наземной аппаратуры, выходы третьей и четвертой ключевых схем соединены соответственно со входом блока измерения амплитуд и вторым входом блока измерения разности фаз.
Сущность изобретения заключается в том, что в состав наземной аппаратуры дополнительно введены последовательно соединенные блок управления и первая ключевая схема, выход которой соединен со второй катушкой индуктивности, выход источника гармонического сигнала соединен со вторым входом первой ключевой схемы, в состав бортовой аппаратуры введены последовательно соединенные блок определения режима работы наземной аппаратуры, вторая ключевая схема и генератор опорного сигнала, выход которого соединен со вторым входом блока определения разности фаз, а также третья и четвертая ключевые схемы, первые входы которых объединены со входом блока определения режимов работы наземной аппаратуры и вторым входом второй ключевой схемы и соединены с выходом измерительного устройства, второй выход блока определения режима работы наземной аппаратуры соединен с объединенными входами третьей и четвертой ключевых схем, выходы третьей и четвертой ключевых схем соединены соответственно со входом блока измерения амплитуд и вторым входом блока измерения разности фаз.
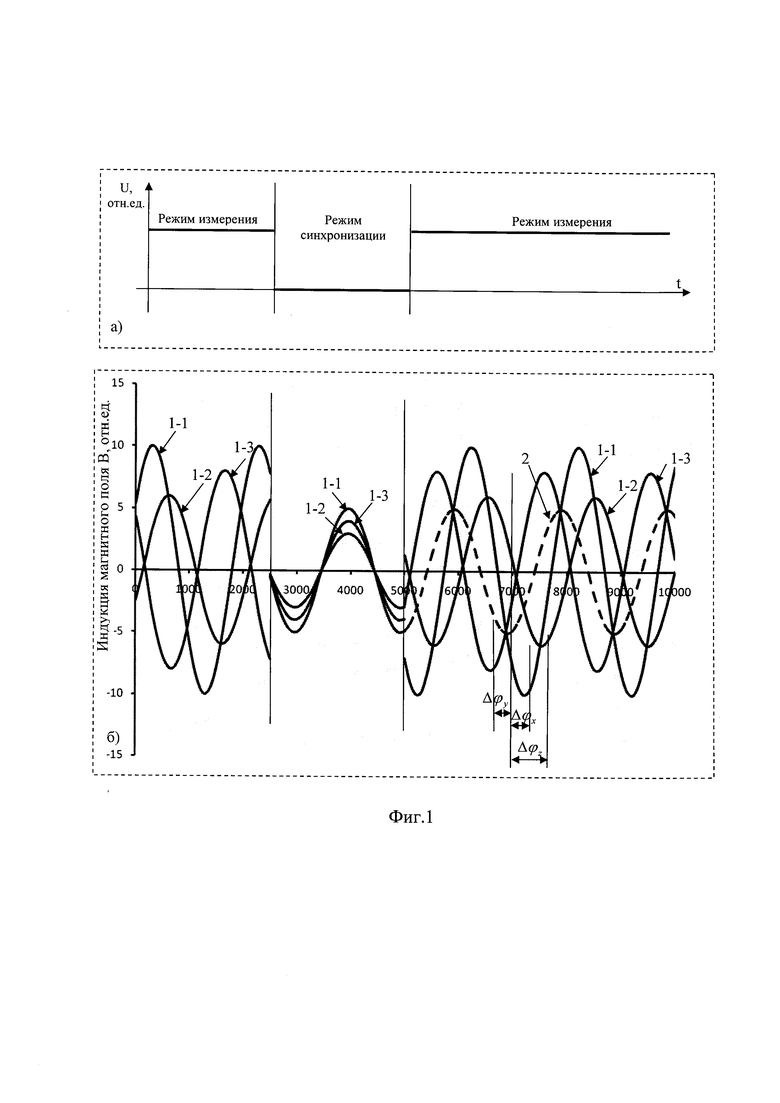
Сущность предлагаемого изобретения поясняется фиг. 1. На фиг. 1а показана схема работы первой ключевой схемы, обозначены режимы работы наземной аппаратуры, а на фиг. 16 - временные зависимости проекций магнитной индукции, где обозначено:
1-1, 1-2, 1-3 - временные зависимости проекций вектора магнитной индукции на оси х (Bx(t)), у (By(t)) и z (Bz (t)) соответственно;
2 - опорный сигнал;
На фиг. 1б также обозначены Δϕx, Δϕy, Δϕz- разности фаз между проекциями вектора магнитной индукции В на оси х, у и z и опорным сигналом соответственно.
Введенные, согласно изобретению, блок управления и первая ключевая схема обеспечивают создание магнитного поля в двух режимах: режиме синхронизации и режиме измерения координат. Введение дополнительных блоков в бортовую аппаратуру позволяет определить режим работы наземной аппаратуры и формировать опорный сигнал непосредственно в бортовой части устройства без использования проводного канала связи, этим достигается технический результат.
На фиг. 2 представлена структурная схема устройства, где обозначено: 3 - наземная аппаратура, 4 - бортовая аппаратура, 5 - источник гармонического сигнала, 6 - фазовращатель, 7-1, 7-2 - две взаимно ортогональные катушки индуктивности, 8-1 - первая ключевая схема, 8-2 - вторая ключевая схема, 8-3 - третья ключевая схема, 8-4 - четвертая ключевая схема, 9 - блок управления, 10 - измерительное устройство, 11 - блок определения режима работы наземной аппаратуры, 12 - блок определения амплитуды, 13 - генератор опорного сигнала, 14 - блок определения разности фаз, 15 - блок вычисления координат.
Катушки 7-1 и 7-2 предназначены для создания магнитного поля, блок управления 9 предназначен для переключения режимов работы наземной аппаратуры. Назначение остальных блоков ясно из их названия. Блок определения режима работы наземной аппаратуры 11 работает следующим образом. Известно [Shuang Song, Chao Ни, Ваори Li, Xiaoxiao Li, Max Q.-H. Meng An Electromagnetic localization and orientation method based on rotating magnetic dipole // IEEE Transactions on magnetics, Vol. 49, №3, march 2013. - P. 1274-1277], что при формировании магнитного поля с помощью одной катушки индуктивности создается поле, эквивалентное полю неподвижного магнитного диполя, и колебания проекций векторов магнитной индукции Bx(t), By(t) и Bz(t) происходят в одной фазе, а при формировании магнитного поля с помощью двух катушек индуктивности, расположенным взаимно перпендикулярно, подключенных к источнику тока со сдвигом фаз  друг относительно друга, создается поле, эквивалентное полю вращающегося магнитного диполя, и колебания проекций векторов магнитной индукции Bx(t), By(t) и Bz(t) имеют разность фаз, отличную от нуля. Поэтому в блоке определения режима работы наземной аппаратуры проверяется условие равенства фаз.
друг относительно друга, создается поле, эквивалентное полю вращающегося магнитного диполя, и колебания проекций векторов магнитной индукции Bx(t), By(t) и Bz(t) имеют разность фаз, отличную от нуля. Поэтому в блоке определения режима работы наземной аппаратуры проверяется условие равенства фаз.
Устройство работает следующим образом. Наземная аппаратура 3 создает магнитное поле с заданными характеристиками. А именно, в течение времени T1 создается магнитное поле, эквивалентное полю неподвижного магнитного диполя (режим синхронизации), далее в течение времени Т2 аналогично работе [Shuang Song, Chao Ни, Ваори Li, Xiaoxiao Li, Max Q.-H. Meng An Electromagnetic localization and orientation method based on rotating magnetic dipole // IEEE Transactions on magnetics, Vol. 49, №3, march 2013. - P. 1274-1277] создается магнитное поле, эквивалентное полю вращающегося магнитного диполя (режим измерения). Во время режима синхронизации от источника гармонического сигнала 5 ток проходит через фазовращатель 6 на первую катушку индуктивности 7-1, ключ 8-1 разомкнут и через вторую катушку индуктивности ток не течет. Магнитное поле создается одной катушкой индуктивности, это поле эквивалентно полю неподвижного магнитного диполя. Во время режима измерения ключ 8-1 замкнут, от источника гармонического сигнала 5 ток проходит на вторую катушку индуктивности 7-2. Таким образом, в режиме измерения магнитное поле создается двумя катушками индуктивности, расположенными перпендикулярно, подключенными к источнику тока со сдвигом фаз  друг относительно друга, это поле эквивалентно полю вращающегося магнитного диполя. Переключение режимов осуществляется с помощью блока управления 9. Минимальное значение T1 и Т2 равно периоду колебаний тока источника гармонического сигнала 5, максимальное значение T1 и Т2 определяется скоростью подвижного объекта. Необходимо, чтобы за время измерения Т1+Т2 координата подвижного объекта изменилась незначительно [Желамский М.В. Электромагнитное позиционирование подвижных объектов. - М.: ФИЗМАТЛИТ, 2013, с. 12].
друг относительно друга, это поле эквивалентно полю вращающегося магнитного диполя. Переключение режимов осуществляется с помощью блока управления 9. Минимальное значение T1 и Т2 равно периоду колебаний тока источника гармонического сигнала 5, максимальное значение T1 и Т2 определяется скоростью подвижного объекта. Необходимо, чтобы за время измерения Т1+Т2 координата подвижного объекта изменилась незначительно [Желамский М.В. Электромагнитное позиционирование подвижных объектов. - М.: ФИЗМАТЛИТ, 2013, с. 12].
Измерительное устройство 10 бортовой аппаратуры 4 представляет собой три взаимно ортогональных датчика магнитного поля, которые измеряют мгновенные значения проекций вектора магнитной индукции Вх, Ву, Bz. Временные зависимости Bx(t), By(t) и Bz(t) приведены на фиг. 1б. В блоке определения режима работы наземной аппаратуры 11 происходит сравнение фаз колебаний Bx(t), By(t) и Bz(t). В случае равенства фаз генерация происходит в режиме синхронизации, в случае различия фаз генерация происходит в режиме измерения (фиг. 1) [Shuang Song, Chao Ни, Ваори Li, Xiaoxiao Li, Max Q.-H. Meng An Electromagnetic localization and orientation method based on rotating magnetic dipole // IEEE Transactions on magnetics, Vol. 49, №3, march 2013. - P. 1274-1277]. Блок определения режимов работы наземной аппаратуры 11 замыкает ключ 8-2 во время режима синхронизации, ключи 8-3 и 8-4 во время режима измерения. После окончания соответствующего режима работы ключи 8-2, 8-3, 8-4 размыкаются. Во время режима синхронизации сигнал попадает на генератор опорного сигнала 13, который создает опорный сигнал 2, совпадающий по фазе с колебаниями Bx(t) 1-1, By(t) 1-2 и Bz(t) 1-3, полученными в режиме синхронизации, и поступающий на блок определения разности фаз 14 в режиме измерения. Во время режима измерения сигнал поступает на блок определения амплитуд 12 и блок определения разности фаз 14. Значения 3-х амплитуд (В0х, В0у, B0z) и 3-х разностей фаз (Δϕх, Δϕу, Δϕz) (фиг. 1б) поступают на блок вычисления координат 15, в котором аналогично работе [Shuang Song, Chao Ни, Ваори Li, Xiaoxiao Li, Max Q.-H. Meng An Electromagnetic localization and orientation method based on rotating magnetic dipole // IEEE Transactions on magnetics, Vol. 49, №3, march 2013. - P. 1274-1277] вычисляются координаты подвижного объекта.
Таким образом, в предложенном устройстве вычисляются координаты подвижного объекта, причем опорный сигнал формируется в бортовой части устройства без использования дополнительного канала связи с наземной аппаратурой, что приводит к расширению области применения устройства и обеспечивает решение навигационных задач для удаленного подвижного объекта.
Следовательно, предлагаемое изобретение, обладая новизной, полезностью и реализуемостью, может найти широкое применение для определения координат подвижного объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО МАГНИТОМЕТРИЧЕСКОЙ ЛОКАЛЬНОЙ НАВИГАЦИИ | 2022 |
|
RU2789733C1 |
| МАГНИТОМЕТРИЧЕСКИЙ КОМПЛЕКС ДЛЯ НАВИГАЦИИ ОБЪЕКТОВ В ПРОСТРАНСТВЕ | 2023 |
|
RU2808125C1 |
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОМАГНИТНОГО КАРОТАЖА СКВАЖИН | 1994 |
|
RU2063053C1 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ НИЗКОЧАСТОТНОГО НАВИГАЦИОННОГО МАГНИТНОГО ПОЛЯ | 2024 |
|
RU2829941C1 |
| МАГНИТОМЕТРИЧЕСКАЯ СИСТЕМА НАВИГАЦИИ | 2024 |
|
RU2824864C1 |
| Устройство для позиционирования рельсового транспорта | 2022 |
|
RU2786255C1 |
| Способ измерения полуосей полного эллипса поляризации магнитного поля и устройство для его осуществления | 2021 |
|
RU2793393C1 |
| Устройство для электромагнитного каротажа скважин | 1979 |
|
SU855586A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА В ПРОСТРАНСТВЕ | 2016 |
|
RU2626755C1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ МОЩНОСТИ:!оюзя-°-^'-^^•^?ПНП-.ТслНл^;::^:^:;:| | 1972 |
|
SU351170A1 |

Изобретение относится к области измерительной техники, в частности к средствам определения координат подвижного объекта, и может быть использовано в системах посадки летательных аппаратов, в строительстве для направленного бурения скважин, в системах навигации подвижных объектов, в медицине для сверхточного позиционирования и других областях науки и техники. Технический результат заключается в расширении функциональных возможностей устройства, в частности обеспечении навигации для удаленного подвижного объекта. Технический результат достигается за счет того, что в устройство для определения координат подвижного объекта в состав наземной аппаратуры дополнительно введены последовательно соединенные блок управления и первая ключевая схема, выход которой соединен со второй катушкой индуктивности, выход источника гармонического сигнала соединен со вторым входом первой ключевой схемы, в состав бортовой аппаратуры введены последовательно соединенные блок определения режима работы наземной аппаратуры, вторая ключевая схема и генератор опорного сигнала, выход которого соединен со вторым входом блока определения разности фаз, а также третья и четвертая ключевые схемы, первые входы которых объединены с входом блока определения режимов работы наземной аппаратуры и вторым входом второй ключевой схемы и соединены с выходом измерительного устройства, второй выход блока определения режима работы наземной аппаратуры соединен с объединенными входами третьей и четвертой ключевых схем, выходы третьей и четвертой ключевых схем соединены соответственно с входом блока измерения амплитуд и вторым входом блока измерения разности фаз. 2 ил.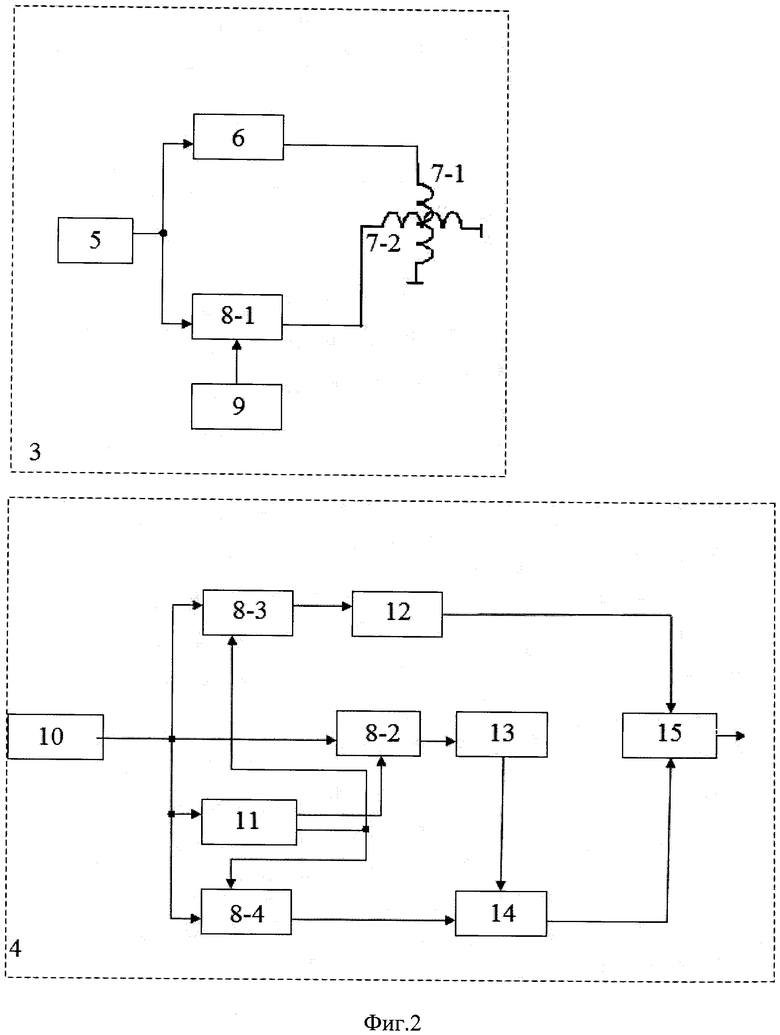
Устройство для определения координат подвижного объекта, состоящее из наземной аппаратуры в составе источника гармонического сигнала и двух катушек индуктивности, расположенных взаимно перпендикулярно, выход источника гармонического сигнала соединен с первой катушкой индуктивности через фазовращатель на  бортовой аппаратуры в составе измерительного устройства, блока измерения амплитуды, блока измерения разности фаз и блока вычисления координат, выход которого является выходом устройства, при этом выход блока измерения амплитуды и выход блока измерения разности фаз соединены соответственно с первым и вторым входами блока вычисления координат, выход которого является выходом устройства, отличающееся тем, что в состав наземной аппаратуры дополнительно введены последовательно соединенные блок управления и первая ключевая схема, выход которой соединен со второй катушкой индуктивности, выход источника гармонического сигнала соединен со вторым входом первой ключевой схемы, в состав бортовой аппаратуры введены последовательно соединенные блок определения режима работы наземной аппаратуры, вторая ключевая схема и генератор опорного сигнала, выход которого соединен со вторым входом блока определения разности фаз, а также третья и четвертая ключевые схемы, первые входы которых объединены с входом блока определения режимов работы наземной аппаратуры и вторым входом второй ключевой схемы и соединены с выходом измерительного устройства, второй выход блока определения режима работы наземной аппаратуры соединен с объединенными входами третьей и четвертой ключевых схем, выходы третьей и четвертой ключевых схем соединены соответственно с входом блока измерения амплитуд и вторым входом блока измерения разности фаз.
бортовой аппаратуры в составе измерительного устройства, блока измерения амплитуды, блока измерения разности фаз и блока вычисления координат, выход которого является выходом устройства, при этом выход блока измерения амплитуды и выход блока измерения разности фаз соединены соответственно с первым и вторым входами блока вычисления координат, выход которого является выходом устройства, отличающееся тем, что в состав наземной аппаратуры дополнительно введены последовательно соединенные блок управления и первая ключевая схема, выход которой соединен со второй катушкой индуктивности, выход источника гармонического сигнала соединен со вторым входом первой ключевой схемы, в состав бортовой аппаратуры введены последовательно соединенные блок определения режима работы наземной аппаратуры, вторая ключевая схема и генератор опорного сигнала, выход которого соединен со вторым входом блока определения разности фаз, а также третья и четвертая ключевые схемы, первые входы которых объединены с входом блока определения режимов работы наземной аппаратуры и вторым входом второй ключевой схемы и соединены с выходом измерительного устройства, второй выход блока определения режима работы наземной аппаратуры соединен с объединенными входами третьей и четвертой ключевых схем, выходы третьей и четвертой ключевых схем соединены соответственно с входом блока измерения амплитуд и вторым входом блока измерения разности фаз.
| СПОСОБ ОПРЕДЕЛЕНИЯ КРАТЧАЙШЕГО РАССТОЯНИЯ И НАПРАВЛЕНИЯ НА ЛИНИЮ ЭЛЕКТРОПЕРЕДАЧИ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2316790C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И ИСПОЛЬЗУЕМЫЙ В НЕМ СЕНСОРНЫЙ БЛОК | 1995 |
|
RU2130618C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ И УГЛОВОГО ПОЛОЖЕНИЯ ОБЪЕКТА (ЕГО ВАРИАНТЫ) | 1997 |
|
RU2119171C1 |
| KR 910005302 B1, 24.07.1991 | |||
| US 9453933 B2, 27.09.2016 | |||
| Shuang Song, Chao Нu, Ваорu Li, Xiaoxiao Li, Max Q.-H | |||
| Meng An, Electromagnetic localization and orientation method based on rotating magnetic dipole // IEEE Transactions on magnetics, Vol | |||
| Способ смешанной растительной и животной проклейки бумаги | 1922 |
|
SU49A1 |
| - | |||

