Изобретение относится к области измерительной техники и может быть использовано для создания средств измерения координат, скорости и угловых величин объекта в автоматических схемах управления, в геомагнитной навигации, в прецизионном машиностроении и приборостроении и т.д.
Известно устройство для дистанционного определения координат и углового положения объекта, реализующее способ определения координат и магнитного момента дипольного источника поля по измеренным параметрам магнитного поля каждый из трех выбранных точек пространства (авт.св. N 1064251, БИ N 48, 1983). Известное устройство состоит из трех трехкомпонентных магниточувствительных датчиков, трех усилительно-преобразовательных блоков, первые входы которых подключены к выходам соответствующих датчиков, а первые выходы подключены к соответствующим первым входам этих датчиков, трех генераторов переменной ЭДС, первые выходы которых подключены к соответствующим вторым входам датчиков, а вторые выходы подключены к соответствующим вторым входам усилительно-преобразовательных блоков, вычислительного блока, вход которого подключен к вторым выходам усилительно-преобразовательных блоков, а выход подключен к третьим входам датчиков, и дипольного источника постоянного магнитного поля, например, в виде намагниченного объекта. При этом каждый усилительно-преобразовательный блок, подключенный к соответствующему трехкомпонентному датчику, состоит из трех каналов, каждый из которых содержит избирательный усилитель и синхронный детектор. Связанные между собой электрическими цепями трехкомпонентный датчик, усилительно-преобразовательный блок и генератор переменной ЭДС образуют электронный блок, поэтому известное устройство содержит три блока.
Известное устройство работает следующим образом. На вторые входы датчиков подаются с первых выходов соответствующих генераторов переменные ЭДС, возбуждающие эти датчики. В результате этого на выходе каждого из датчиков появляются три ЭДС второй гармоники, каждая из которых пропорциональна одной из трех компонент магнитного поля, созданного дипольным источником и внешним магнитным полем, в частности геомагнитным полем и магнитным полем промышленных помех. Выходные сигналы с датчиков усиливаются и детектируются в соответствующих усилительно-преобразовательных блоках, поэтому выходные сигналы с каждого усилительно-преобразовательного блока пропорциональны трем компонентам вектора магнитной индукции. Для детектирования сигналов на вторые входы каждого усилительно-преобразовательного блока подается переменное напряжение с вторых выходов соответствующих генераторов переменной ЭДС. Выходные сигналы с первых выходов усилительно-преобразовательных блоков подаются на первые входы соответствующих датчиков, обеспечивая отрицательную обратную связь по измеренным составляющим векторов магнитной индукции. Выходные сигналы с усилительно-преобразовательных блоков подаются на входы вычислительного блока. В вычислительном блоке осуществляется определение компонент однородного магнитного поля, координат и магнитного момента дипольного источника, а также определение направляющих косинусов вектора магнитного момента этого источника. Направление вектора магнитного момента дипольного источника поля жестко связано с намагниченностью объекта этого источника (Чернышев Е. Т., Чечурина Е.Н.,Чернышева Н.Г., Студенцов Н.В. Магнитные измерения. М.: Изд.-во Комитета стандартов и измерительных приборов, 1969, с. 41-42), поэтому направляющие косинусы вектора магнитного момента дипольного источника поля определяют угловое положение этого источника. Сигналы, пропорциональные компонентам вектора однородного магнитного поля, поступают с выходов вычислительного блока на соответствующий датчик, осуществляя компенсацию однородного магнитного поля в объеме каждого из датчиков.
Известное устройство осуществляет измерение разностей проекций векторов магнитной индукции, созданной дипольным источником постоянного магнитного поля на фоне магнитного поля промышленных помех и геомагнитного поля. Магнитное поле промышленных помех и геомагнитное поле могут более чем на два порядка превышать магнитное поле дипольного источника в выбранных местах расположения датчиков. В данном устройстве отсутствует избирательность по полезному сигналу. Действительно, для измерения разностей проекций векторов магнитной индукции дипольного источника воспринимают неоднородное внешнее магнитное поле, например магнитное поле промышленных помех как полезный сигнал. Все это приводит к снижению точности измерения разностей проекций векторов магнитной индукции, а следовательно, и к снижению точности определения координат и углового положения дипольного источника поля, а также объекта, на котором расположен источник.
Известно также устройство, реализующее способ дистанционного определения координат и углового положения объекта (Смирнов Б.М. Магнитометрический метод определения углового положения объекта. - М.: Измерительная техника, 1996, N 12, с. 34-37), которое по совокупности существенных признаков наиболее близко предлагаемому и принято за прототип. Известное устройство состоит из двух катушек индуктивности с взаимно ортогональными осями, генератора переменных напряжений, у которого первый и второй выходы подключены к выводам первой катушки индуктивности, а третий и четвертый выходы - к выводам второй катушки индуктивности, двух трехкомпонентных датчиков, шести усилителей переменных напряжений, вход каждого из которых подключен к соответствующему выходу одного из трехкомпонентных датчиков, и двенадцати преобразовательных блоков. Параллельно соединенные первые входы первого и седьмого, второго и восьмого, третьего и девятого, пятого и одиннадцатого, шестого и двенадцатого преобразовательных блоков подключены соответственно к выходам первого, второго, третьего, четвертого, пятого и шестого усилителей переменных напряжений. Вторые входы первого, второго, третьего, четвертого, пятого и шестого преобразовательных блоков подключены к пятому, а вторые входы седьмого, восьмого, девятого, десятого, одиннадцатого и двенадцатого преобразовательных блоков подключены к шестому выходу генератора переменных напряжений. При этом обе катушки индуктивности размещены на объекте.
Известное устройство работает следующим образом. Генератор переменных напряжений создает переменные напряжения с частотами f1 и f2, одно из которых подается на первую катушку индуктивности, а второе напряжение подается на вторую катушку индуктивности. Токи, протекающие в катушках индуктивности, создают магнитные поля с соответствующими частотами f1 и f2. Магнитные поля индуктируют три переменные ЭДС в каждом из трехкомпонентных датчиков, пропорциональные составляющим векторов магнитной индукции. Эти ЭДС усиливаются усилителями переменных напряжений, которые одновременно выполняют роль согласующих узлов между датчиками и преобразовательными блоками. Каждый преобразовательный блок состоит из полосового фильтра и синхронного детектора. Полосовые фильтры первого, второго, третьего, четвертого, пятого и шестого преобразовательных блоков настроены на переменные напряжения с частотой f1, а на синхронные детекторы этих блоков подается переменное напряжение с частотой f1 с пятого выхода генератора переменных напряжений. Полосовые фильтры седьмого, восьмого, девятого, десятого, одиннадцатого и двенадцатого преобразовательных блоков настроены на переменное напряжение с частотой f2, а на синхронные детекторы этих блоков подается переменное напряжение с частотой f2 с шестого выхода генератора переменных напряжений. В результате этого преобразовательные блоки выделяют сигналы, пропорциональные составляющим векторов магнитной индукции, созданной катушками индуктивности в местах размещения датчиков. Синхронное детектирование обеспечивает измерение сигналов пропорционально изменению их амплитуд и фаз. При смене фазы на 180o какой-либо переменной составляющей магнитной индукции в местах размещения датчиков сигнал с выхода соответствующего преобразовательного блока изменит полярностью. По измеренным в двух точках пространства значениям составляющих векторов магнитной индукции и взаимному расположению трехкомпонентных датчиков определяют координаты катушек индуктивности, а значит и координаты объекта, и векторы дипольных магнитных моментов этих катушек, например, по алгоритму, изложенному в работе (Смирнов Б.М. Метод определения координат и магнитного дипольного источника поля. - М.: Измерительная техника, 1988, N 9, с. 40-42). Определение углового положения объекта осуществляется по направляющим косинусам векторов дипольных магнитных моментов катушек индуктивности, каждая из которых связана с объектом. Направления векторов магнитных моментов катушек индуктивности жестко связаны с осями этих катушек (Чернышев Е.Т., Чечурина Е.Н., Чернышева Н.Г., Студенцов В.Н. Магнитные измерения - М. : Изд-во Комитета стандартов и измерительных приборов, 1969), поэтому направляющие косинусы векторов магнитных моментов определяют и угловое положение этих катушек, а значит и объекта.
В известном устройстве осуществлена контактная (проводная) связь между передающим прибором, включающим катушки индуктивности, размещенные на объекте, и генератор переменных напряжений, и приемным прибором, к которому относятся датчики, усилители переменных напряжений, преобразовательные блоки. Наличие проводной связи не обеспечивает определение координат и углового положения объекта на удаленных расстояниях, например, при посадке самолета или на небольших расстояниях, когда невозможно осуществить проводную связь между катушками индуктивности, преобразовательными блоками и генератором переменных напряжений, в частности, при стыковке космических аппаратов. Кроме того, в известном устройстве определение координат и углового положения объекта осуществляется численным методом с большими затратами времени на обработку информации, требующим от вычислительного устройства значительного объема памяти.
Задачей предлагаемого изобретения является создание устройства для дистанционного определения координат и углового положения объекта от прототипа как отсутствием контактной, в частности, проводной связи между приемным и передающим приборами, так и существенно меньшими затратами времени при обработке информации и значительно меньшим объемом памяти вычислительного устройства. Поставленная задача дистанционного определения координат и углового положения объекта решается за счет измерения в одной и трех точках пространства составляющих векторов магнитной индукции, воспроизводимой тремя источниками переменных магнитных полей, в частности, катушки индуктивности.
Изобретение представляет два устройства для дистанционного определения координат и углового положения объекта, связанных между собой настолько, что они образуют единый изобретательский замысел.
Изобретение для дистанционного определения координат и углового положения объекта (по первому варианту), включающее две катушки индуктивности с взаимно ортогональными осями, размещенные на объекте, генератор переменных напряжений, у которого первый и второй выходы подключены к выводам первой катушки индуктивности, а третий и четвертый выходы - к выводам второй катушки индуктивности, трехкомпонентный датчик, три усилителя переменных напряжений, вход каждого из которых подключен к соответствующему выходу трехкомпонентного датчика, и три преобразовательных блока, первый вход каждого из которых подключен к выходу соответствующего усилителя переменных напряжений, а выходы являются выходами устройства, снабжено третьей катушкой индуктивности, формирователем опорных напряжений и коммутатором, выход которого подключен к вторым входам всех преобразовательных блоков, а каждый из трех входов подключен к соответствующему выходу формирователя опорных напряжений, у которого каждый из трех входов подключен к выходу соответствующего усилителя переменных напряжений, выводы третьей катушки индуктивности подключены к пятому и шестому выходам генератора переменных напряжений, причем генератор переменных напряжений и третья катушка индуктивности размещены на объекте, а ось третьей катушки индуктивности перпендикулярна осям первой и второй катушек индуктивности.
Предлагаемое устройство для дистанционного определения координат и углового положения объекта (по второму варианту), включающее две катушки индуктивности с взаимно ортогональными осями, размещенные на объекте, генератор переменных напряжений, у которого первый и второй выходы подключены к выводам первой катушки индуктивности, а третий и четвертый выходы - к выводам второй катушки индуктивности, два трехкомпонентных датчика, шесть усилителей переменных напряжений, вход каждого из которых подключен к соответствующему выходу одного из трехкомпонентных датчиков, и девять преобразовательных блоков, первый вход одного из которых подключен к выходу первого усилителя переменных напряжений, первый вход второго подключен к выходу второго усилителя переменных напряжений, первый вход третьего подключен к выходу третьего усилителя переменных напряжений, первый вход четвертого подключен к выходу четвертого усилителя переменных напряжений, первый вход пятого подключен к выходу пятого усилителя переменных напряжений и первый вход шестого подключен к выходу шестого усилителя переменных напряжений, а выходы всех преобразовательных блоков являются выходами устройства, снабжено третьей катушкой индуктивности, третьим трехкомпонентным датчиком, формирователем опорных напряжений, коммутатором, седьмым, восьмым и девятым усилителями переменных напряжений, при этом входы седьмого, восьмого и девятого усилителей переменных напряжений подключены к соответствующим выходам третьего трехкомпонентного датчика, выход седьмого усилителя переменных напряжений подключен к первому входу седьмого преобразовательного блока, выход восьмого усилителя переменных напряжений подключен к первому входу восьмого преобразовательного блока, выход девятого усилителя переменных напряжений подключен к первому входу девятого преобразовательного блока, вторые входы всех преобразовательных блоков подключены к выходу коммутатора, каждый из трех входов которого подключен к соответствующему выходу формирователя опорных напряжений, у которого каждый из трех входов подключен к выходу соответствующего усилителя переменных напряжений, которые подключены к выходам первого датчика, выводы третьей катушки индуктивности подключены к пятому и шестому выходам генератора переменных напряжений, причем генератор переменных напряжений и третья катушка индуктивности размещены на объекте, а ось третьей катушки индуктивности перпендикулярна осям первой и второй катушек индуктивности.
Применение в предлагаемом решении по первому варианту трехкомпонентного датчика, трех усилителей переменных напряжений, трех преобразовательных блоков, формирователя опорных напряжений и коммутатора, включенных между собой определенным образом, а также размещенных на объекте трех катушек индуктивности с взаимно ортогональными осями и генератора переменных напряжений, подключенного к этим катушкам, и измерение составляющих трех векторов магнитной индукции, созданной катушками индуктивности, обеспечивает определение координат и углового положения объекта при размещении катушек индуктивности в известном октанте системы координат, образованной осями трехкомпонентного датчика. При этом определение координат и углового положения объекта осуществляется при отсутствии контактной связи приемного прибора устройства, включающего датчик, три усилителя переменных напряжений, три преобразовательных блока, формирователь опорных напряжений и коммутатор с передающим прибором устройства, включающим размещенные на объекте катушки индуктивности и генератор переменных напряжений. Это обеспечивает дистанционное определение координат и углового положения объекта там, где контактную связь приемного прибора с передающим прибором, расположенным на объекте, сложно или невозможно осуществить. Предлагаемое техническое решение обеспечивает значительное снижение времени обработки информации для определения координат и углового положения объекта по сравнению с прототипом. Кроме того, на объекте может быть размещен либо передающий прибор, либо приемный прибор предлагаемого устройства.
Применение в предлагаемом техническом решении по второму варианту трех трехкомпонентных датчиков, девяти усилителей переменных напряжений, девяти преобразовательных блоков, формирователя опорных напряжений и коммутатора, включенных между собой соответствующим образом, а также размещенных на объекте трех катушек индуктивности с взаимно ортогональными осями и генератора переменных напряжений, подключенного к этим катушкам, и измерение составляющих девяти векторов магнитной индукции, созданной катушками индуктивности, обеспечивает определение координат и углового положения объекта при отсутствии сведений, в каком октане системы координат находятся катушки индуктивности. При этом определение координат и углового положения объекта осуществляется при отсутствии контактной связи передающего прибора устройства, включающего расположенные на объекте три катушки индуктивности и генератор переменных напряжений, с приемным прибором устройствах, включающего три трехкомпонентных датчика, девять усилителей переменных напряжений, девять преобразовательных блоков, формирователь опорных напряжений и коммутатор. Это обеспечивает дистанционное определение координат и углового положения объекта там, где контактную связь приемного прибора с передающим прибором сложно или невозможно осуществить. Предлагаемое техническое решение обеспечивает значительное снижение времени обработки информации для определения координат и углового положения объекта по сравнению с прототипом. Кроме того, на объекте может быть размещен либо передающий прибор, либо приемный прибор предлагаемого устройства.
Таким образом, технический результат предлагаемого устройства для дистанционного определения координат и углового положения объекта выражается в определении координат и углового положения объекта при отсутствии контакта с объектом и существенном сокращении времени обработки информации по сравнению с прототипом.
Сущность предлагаемого изобретения поясняется следующими графическими материалами.
На фиг.1 изображена структурная схема устройства для дистанционного определения координат и углового положения объекта по первому варианту; на фиг. 2 - структурная схема устройства для дистанционного определения координат и углового положения объекта по второму варианту; на фиг.3 - структурная схема блока формирования опорного переменного напряжения с частотой f1; на фиг.4 - эпюры напряжений с выходов блоков формирователя переменного напряжения с частотой f4.
Предлагаемое устройство для дистанционного определения координат и углового положения объекта по первому варианту (фиг.1) состоит из трехкомпонентного датчика 1, трех усилителей переменных напряжений 2-4, вход каждого из которых подключен к соответствующему выходу трехкомпонентного датчика, трех преобразовательных блоков 5-6, первый вход каждого из которых подключен к выходу соответствующего усилителя переменных напряжений, а выходы являются выходами устройства, формирователя опорных напряжений (ФОН) 8, у которого каждый из трех входов подключен к выходу соответствующего усилителя переменных напряжений, коммутатора 9, выход которого подключен к вторым входам блоков 5-7, а каждый из трех входов подключен к соответствующему выходу формирователя опорных напряжений 8, трех катушек индуктивности 10-12 с взаимно ортогональными осями, генератора переменных напряжений 13 и объекта 14, на котором размещены катушки 10-12 и генератор 13, при этом первый и второй выходы генератора 13 подключены к выводам катушки 10, третий и четвертый выходы генератора 13 подключены к выводам катушки 11, пятый и шестой выходы генератора 13 подключены к выводам катушки 12.
Предлагаемое устройство для дистанционного определения координат и углового положения объекта по второму варианту (фиг. 2) состоит из трех трехкомпонентных датчиков 15-17, девяти усилителей переменных напряжений 18-26, вход каждого из которых подключен к соответствующему выходу одного из трехкомпонентных датчиков, девяти преобразовательных блоков 27-35, выходы которых являются выходами устройства, формирователя опорных напряжений (ФОН) 36, коммутатора 37, трех катушек индуктивности 38-40 с взаимно ортогональными осями, генератора переменных напряжений 41, размещенного вместе с катушками 38-40 на объекте 42. Выход усилителя 18 подключен к первому входу блока 27 и первому входу ФОН 36, выход усилителя 19 подключен к первому входу блока 28 и второму входу ФОН 36, выход усилителя 20 подключен к первому входу блока 29 и третьему входу ФОН 36, выход усилителя 21 подключен к первому входу блока 30, выход усилителя 22 подключен к первому входу блока 31, выход усилителя 23 подключен к первому входу блока 32, выход усилителя 24 подключен к первому входу блока 33, выход усилителя 25 подключен к первому входу блока 34, выход усилителя 26 подключен к первому входу блока 35. Каждый из трех выходов ФОН 36 подключен к соответствующему входу коммутатора 37, выход которого подключен к вторым входам блоков 27-35. Первый и второй выходы генератора 41 подключены к выводам катушки 38, третий и четвертый выходы генератора 41 подключены к выводам катушки 39, пятый и шестой выходы генератора 41 подключены к выводам катушки 40.
Предлагаемое устройство для дистанционного определения координат и углевого положения объекта по первому варианту работает следующим образом. В катушках 10-12 (см. фиг. 1), подключенных к генератору 13, протекают переменные токи разных частот. В результате этого катушки 10-12 создают переменные магнитные поля с частотами f1, f2, f3. В трехкомпонентном датчике 1, например в пассивном индукционном датчике, индуктируются переменные ЭДС, каждая из которых пропорциональна составляющей вектора магнитной индукции, созданной катушками 10-12 с соответствующими частотами f1, f2, f3. Эти ЭДС усиливаются усилителями 2-4, которые выполняют одновременно роль согласующих усилителей между высокоомными выходами датчика 1 и преобразовательными блоками 5-7, что снижает влияние еще и коммутационных напряжений, поступающих с коммутатора 9 через блоки 5-7 на выходы датчика 1. Кроме того, низкоомные выходы усилителей 2-4 снижают влияние паразитных электрических сигналов, наводимых в электрических цепях, соединяющих блоки 5-7 с датчиком 1. Сигналы с усилителей 2-4 поступают на первые входы преобразовательных блоков 5-7. На вторые входы этих блоков 5-7 периодически подаются переменные напряжения с частотами f1, f2, f3. В результате этого на выходах блоков 5-7 будут сигналы соответствующих полярностей, пропорциональные амплитудам составляющих векторов магнитной индукции, созданных катушками 10-12. Поэтому выходные сигналы с блоков 5-7 будут пропорциональны следующим значениям: проекциям вектора магнитной индукции  на соответствующие оси ОX, OY, OZ при поступлении на вторые входы блоков 5-7 опорного переменного напряжения с частотой f1 с выхода коммутатора 9; проекциям вектора магнитной индукции
на соответствующие оси ОX, OY, OZ при поступлении на вторые входы блоков 5-7 опорного переменного напряжения с частотой f1 с выхода коммутатора 9; проекциям вектора магнитной индукции  на соответствующие оси OX, OY, OZ при поступлении на вторые входы блоков 5-7 опорного переменного напряжения с частотой f2 с выхода коммутатора 9; проекциям вектора магнитной индукции
на соответствующие оси OX, OY, OZ при поступлении на вторые входы блоков 5-7 опорного переменного напряжения с частотой f2 с выхода коммутатора 9; проекциям вектора магнитной индукции  на соответствующие оси OX, OY, OZ при поступлении на вторые входы блоков 5-7 опорного переменного напряжения с частотой f3 с выхода коммутатора 9. Фазы опорных переменных напряжений с выхода коммутатора 9 постоянные и не изменяются от ориентации осей катушек 10-12 относительно осей датчика 1. Эти опорные переменные напряжения с частотами f1, f2, f3 поступают на три входа коммутатора 9 с выходов ФОН 8. ФОН 8 состоит из следующих трех блоков: блока формирования (БФ) опорного переменного напряжения с частотой f1, БФ опорного переменного напряжения с частотой f2 и БФ опорного переменного напряжения с частотой f3. Структурная схема БФ опорного переменного напряжения с частотой f1 изображена на фиг. 3. БФ опорного переменного напряжения с частотой f1 состоит из трех полосовых фильтров 43-45, настроенных на частоту f1; трех блоков усиления напряжений по абсолютном величинам (по модулям) 46-48; сумматора 49; полосового фильтра 50, настроенного на напряжение с частотой 2f1; фазовращателя 51; ограничителя напряжения 52 и делителя частоты напряжения 53.
на соответствующие оси OX, OY, OZ при поступлении на вторые входы блоков 5-7 опорного переменного напряжения с частотой f3 с выхода коммутатора 9. Фазы опорных переменных напряжений с выхода коммутатора 9 постоянные и не изменяются от ориентации осей катушек 10-12 относительно осей датчика 1. Эти опорные переменные напряжения с частотами f1, f2, f3 поступают на три входа коммутатора 9 с выходов ФОН 8. ФОН 8 состоит из следующих трех блоков: блока формирования (БФ) опорного переменного напряжения с частотой f1, БФ опорного переменного напряжения с частотой f2 и БФ опорного переменного напряжения с частотой f3. Структурная схема БФ опорного переменного напряжения с частотой f1 изображена на фиг. 3. БФ опорного переменного напряжения с частотой f1 состоит из трех полосовых фильтров 43-45, настроенных на частоту f1; трех блоков усиления напряжений по абсолютном величинам (по модулям) 46-48; сумматора 49; полосового фильтра 50, настроенного на напряжение с частотой 2f1; фазовращателя 51; ограничителя напряжения 52 и делителя частоты напряжения 53.
Сигналы с первого, второго и третьего выходов датчика 1 (см. фиг. 1) через усилители 18-20 подаются на соответствующие полосовые фильтры 43-45 (фиг. 3). Возможные напряжения Uxf1, Uyf1, Uzf1 с выходов фильтров 43-45 показаны на фиг. 4. Фаза каждого из этих напряжений может принимать одно из двух значений 0o или 180o в зависимости от ориентации датчика 1 (фиг. 1) относительно источника переменных магнитных полей, образованного катушками 10-12. Выходные сигналы с фильтров 43-45 (фиг. 3) подаются на соответствующие входы блоков усиления модулей напряжений 46-48. С выходов блоков 46-48 напряжения |Uxf1|, |Uyf1|,|Uzf1| (фиг. 4) подаются на входы сумматора 49 (фиг. 3). Напряжение U1 с выхода сумматора является четной функцией. Подав это напряжение на полосовой фильтр 50, настроенный на напряжение с частотой 2f1 получим на его выходе напряжение U2f1 (фиг. 4). Фаза напряжения U2f1 при работе устройства остается постоянной и не зависит от изменения фазы любого из напряжений Uxf1, Uyf1, Uzf1. Это позволяет использовать напряжение U2f1 для формирования опорного переменного напряжения, обеспечивающего измерение напряжений, пропорциональных проекциям векторов магнитной индукции, созданной катушкой 10 (фиг. 1), в месте размещения датчика 1 при изменении ориентации катушки 10, а значит и изменения углового положения объекта 14. Напряжение U2f1 подается на фазовращатель 51 (фиг. 3), на выходе которого получаем напряжение  (фиг. 4). С выхода фазовращателя 51 (фиг. 3) напряжение U2f1 подается на ограничитель напряжения 52. С выхода ограничителя напряжения 52 напряжение
(фиг. 4). С выхода фазовращателя 51 (фиг. 3) напряжение U2f1 подается на ограничитель напряжения 52. С выхода ограничителя напряжения 52 напряжение  (фиг. 4) поступает на делитель частоты напряжения 53 (фиг. 3), на выходе которого получаем импульсы опорного переменного напряжения Uof1 (фиг. 4) с частотой f1. Фазовращатель 51 (фиг. 3) изменяем фазу опорного напряжения U2f1 так, чтобы импульсы напряжения U0f1 были бы в фазе или в противофазе с одним из напряжений Uxf1, Uyf1, Uzf1, что соответствовало бы действительному угловому положению объекта 14 (фиг. 1).
(фиг. 4) поступает на делитель частоты напряжения 53 (фиг. 3), на выходе которого получаем импульсы опорного переменного напряжения Uof1 (фиг. 4) с частотой f1. Фазовращатель 51 (фиг. 3) изменяем фазу опорного напряжения U2f1 так, чтобы импульсы напряжения U0f1 были бы в фазе или в противофазе с одним из напряжений Uxf1, Uyf1, Uzf1, что соответствовало бы действительному угловому положению объекта 14 (фиг. 1).
Блоки формирования опорных переменных напряжений с частотами f2 и f3, входящие в ФОН 8 (фиг. 1), выполнены аналогично БФ опорного переменного напряжения с частотой f1. Таким образом, с ФОН 8 подаются опорные переменные напряжения на коммутатор 9 с частотами f1, f2, f3, что обеспечивает измерение напряжений, созданных катушками 1-12 в месте размещения датчика 1 при изменении ориентации осей катушек 10-12, а значит и изменении углового положения объекта 14.
Аппроксимируя переменные магнитные поля в месте размещения датчика 1 (фиг. 1) дипольными магнитными полями, созданными катушками 10-12, и принимая максимальное расстояние между катушками 10-12 существенно меньше расстояния до датчика 1 или выполнив с совмещенными геометрическими центрами как датчик 1, так и катушки 10-12, определим расстояние r1 от датчика 1 до источника переменных магнитных полей и координаты x, y, z датчика 1 в системе координат, оси которой коллинеарны осям OX, OY, OZ, а начало координат совпадает с точкой O' (фиг. 1), из следующих уравнений:
где



a = Mx/My;
b = Mx/My;
Mx, My, Mz - абсолютные значения векторов магнитных моментов катушек 10-12.
Знаки x, y, z определены известной информацией об октанте системы координат OXYZ, в котором находятся катушки 10-12, размещенные на объекте 14 (фиг. 1).
Направляющие косинусы l1, l2, l3, m1, m2, m3, n1, n2, n3 (Ефимов Н.В. Квадратичные формы и матрицы.- М.: Наука, 1975) осей катушек 10-12 в системе координат OXYZ, несущие информацию об угловом положении катушек 10-12, а значит и об угловом положении объекта 14, являются решением системы уравнений
[l1 l2 l3]t = L-1•[Bx1 Bx2 Bx3]t;
[m1 m2 m3]t = L-1•[By1 By2 By3]t;
[n1 n2 n3]t = L-1•[Bz1 Bz2 Bz3]t;


Таким образом, техническое решение по первому варианту обеспечивает определение координат и углового положения объекта при отсутствии контакта передающего прибора, состоящего из катушек 10-12 и генератора 13, расположенных на объекте 14, с приемным прибором, состоящим из датчика 1, усилителей 2-4, блоков 5-7, ФОН 8 и коммутатора 9 (фиг. 1). При этом решение осуществляется в явном виде в отличие от прототипа, где для определения действительных значений координат и углового положения объекта используется численный метод последовательных приближений, включающий вычислительных операций на несколько порядков больше по сравнению с предлагаемым техническим решением.
Предлагаемое устройство для дистанционного определения координат и углового положения объекта по второму варианту работает следующим образом. В катушках 38-40 (фиг. 2), подключенных к генератору 41, протекают переменные токи разных частот. В результате этого катушки 38-40 создают переменные магнитные поля с частотами f1, f2, f3. В трехкомпонентных датчиках 15-17, например в пассивных индукционных датчиках, индуктируются переменные ЭДС, каждая из которых пропорциональна составляющей вектора магнитной индукции, созданной катушками 38-40. ЭДС усиливаются усилителями 18-26, которые выполняют одновременно роль согласующих усилителей между высокоомными выходами датчиков 15-17 и блоками 27-35. Это снижает влияние коммутационных напряжений, поступающих с коммутатора 37 через блоки 18-26 на выходы датчиков 15-17. Кроме того, низкоомные выходы усилителей 18-26 снижают влияние паразитных электрических сигналов, наводимых в электрических цепях, соединяющих блоки 27-35 с датчиками. На вторые входы блоков 27-35 периодически подаются переменные напряжения с частотами f1, f2, f3. В результате этого на выходах блоков 27-35 будут сигналы соответствующих полярностей, пропорциональные амплитудам составляющих векторов магнитной индукции, созданной катушками 38-40. Поэтому выходные сигналы с блоков 27-35 будут пропорциональны следующим значениям проекций векторов магнитной индукции: при поступлении на вторые входы блоков 27-35 опорного переменного напряжения с частотой f1 с выхода коммутатора 37 проекциям вектора магнитной индукции  на соответствующие оси 0X, 0Y, 0Z с выходов блоков 27-29, проекциям вектора магнитной индукции
на соответствующие оси 0X, 0Y, 0Z с выходов блоков 27-29, проекциям вектора магнитной индукции  на соответствующие оси 0X, 0Y, 0Z с выходов блоков 30-32, проекциям вектора магнитной индукции
на соответствующие оси 0X, 0Y, 0Z с выходов блоков 30-32, проекциям вектора магнитной индукции  на соответствующие оси 0X, 0Y, 0Z с выходов блоков 33-35; при поступлении на вторые входы блоков 27-35 опорного переменного напряжения с частотой f2 с выхода коммутатора 37 проекциям вектора магнитной индукции
на соответствующие оси 0X, 0Y, 0Z с выходов блоков 33-35; при поступлении на вторые входы блоков 27-35 опорного переменного напряжения с частотой f2 с выхода коммутатора 37 проекциям вектора магнитной индукции  на соответствующие оси 0X, 0Y, 0Z с выходов блоков 27-29, проекциям вектора магнитной индукции
на соответствующие оси 0X, 0Y, 0Z с выходов блоков 27-29, проекциям вектора магнитной индукции  на соответствующие оси 0X, 0Y, 0Z с выходов блоков 30-32, проекциям вектора магнитной индукции
на соответствующие оси 0X, 0Y, 0Z с выходов блоков 30-32, проекциям вектора магнитной индукции  на соответствующие оси 0X, 0Y, 0Z с выходов блоков 33-35; при поступлении на вторые входы блоков 27-35 опорного переменного напряжения с частотой f3 с выхода коммутатора 37 проекциям вектора магнитной индукции
на соответствующие оси 0X, 0Y, 0Z с выходов блоков 33-35; при поступлении на вторые входы блоков 27-35 опорного переменного напряжения с частотой f3 с выхода коммутатора 37 проекциям вектора магнитной индукции  на соответствующие оси 0X, 0Y, 0Z с выходов блоков 27-29, проекциям вектора магнитной индукции
на соответствующие оси 0X, 0Y, 0Z с выходов блоков 27-29, проекциям вектора магнитной индукции  на соответствующие оси 0X, 0Y, 0Z с выходов блоков 30-32, проекциям вектора магнитной индукции
на соответствующие оси 0X, 0Y, 0Z с выходов блоков 30-32, проекциям вектора магнитной индукции  на соответствующие оси 0X, 0Y, 0Z с выходов блоков 33-35. Фазы опорных переменных напряжений с выхода коммутатора 37 постоянные и не изменяются от ориентации осей катушек 38-40 относительно осей системы координат 0XYZ (фиг. 2). Эти опорные переменные напряжения с частотами f1, f2, f3 поступают на три входа коммутатора 37 с выходов ФОН 36. ФОН 36 выполнен и работает аналогично как и ФОН 8 (фиг. 1) устройства по первому варианту.
на соответствующие оси 0X, 0Y, 0Z с выходов блоков 33-35. Фазы опорных переменных напряжений с выхода коммутатора 37 постоянные и не изменяются от ориентации осей катушек 38-40 относительно осей системы координат 0XYZ (фиг. 2). Эти опорные переменные напряжения с частотами f1, f2, f3 поступают на три входа коммутатора 37 с выходов ФОН 36. ФОН 36 выполнен и работает аналогично как и ФОН 8 (фиг. 1) устройства по первому варианту.
По измеренным составляющим векторов магнитной индукции в местах размещения датчиков 15-17 (фиг. 2) определяют аналогично, как и по первому варианту расстояние r1 от датчика 15 до трехкомпонентного источника переменных магнитных полей, образованного катушками 38-40, расстояние r2 от датчика 16 до упомянутого источника и расстояние r3 от датчика 17 до этого же источника.
Расстояния r1, r2, r3 можно представить в следующем виде


где
a1, b1, c1 и a2, b2, c2 - координаты второго и третьего датчиков относительно первого датчика 15.
Система последних трех уравнений имеет два решения. Предположим, что одному из этих решений соответствует радиус-вектор  а второму - радиус-вектор
а второму - радиус-вектор 
Определяют значения двух функций, например, F1 и F2
где .
.
Значения a1, b1, c1 и a2, b2, c2 выбирают так, чтобы из приведенных уравнений для r1, r2, r3 каждую координату можно было бы выразить как функцию от одной из двух других координат. Так, например, при a1 = a2 ≠ 0, b1 ≠ 0, c2 ≠ 0, C1 = b2 = 0, то при F1 = 0 значение F2 ≠ 0, а действительным значениям координат будут соответствовать координаты (x1, y1, z1). Далее определение направляющих косинусов векторов магнитных моментов катушек 38-40 осуществляется по алгоритму первого варианта предлагаемого устройства. Вектор магнитного момента жестко связан с осью катушки индуктивности (Чернышев Е. Т. , Чечурина Е.Н., Чернышева Н.Г., Студенцов Н.В. Магнитные измерения. М.: Изд-во Комитета стандартов и измерительных приборов, 1969, с. 41-42), поэтому направляющие косинусы векторов магнитных моментов катушек 38-40, оси которых взаимо ортогональны, определяют угловое положение объекта с расположенными на нем катушками 38-40.
Следовательно, техническое решение по второму варианту обеспечивает определение координат и углового положения объекта при отсутствии контакта передающего прибора, состоящего из катушек 38-40 (фиг. 2) и генератора 41, расположенных на объекте 42, с приемным прибором, состоящим из датчиков 15-17, усилителей 18-26, блоков 27-35, ФОН 36 и коммутатора 37. При этом решение осуществляется в явном виде в отличие от прототипа, где для определения действительных значений координат и углового положения объекта требуется количество вычислительных операций, а, значит, и времени обработки информации на несколько порядков больше. Кроме того, в данном техническом решении не требуется сведений об октанте, в котором размещены катушки 38-40, расположенные на объекте 42.
Таким образом, технический результат предлагаемого устройства для дистанционного определения координат и углового положения объекта выражается в определении координат и углового положения объекта при отсутствии контакта с объектом и существенном сокращении времени обработки информации по сравнению с прототипом.
Использование в заявляемом техническом решении вычислительного блока позволит автоматизировать процесс дистанционного определения координат и углового положения объекта. Для этого выходы преобразовательных блоков предлагаемого устройства (его вариантов) следует подключить, например, к преобразователю измерительному многоканальному (ПИМ-1, сертификат N 15660-96, Госстандарт России), разработанного АО "АТИС" (г. Санкт-Петербург).
В предлагаемом устройстве (его вариантах) катушки индуктивности могут быть выполнены в виде мер магнитного момента, а трехкомпонентные пассивные датчики могут быть реализованы из однокомпонентных индукционных датчиков (Чернышев Е.Т., Чечурина Е.Н., Чернышева Н.Г., Студенцов Н.В. Магнитные измерения. - М.: Изд-во Комитета стандартов и измерительных приборов, 1969, с. 41-42, 59-62). Усилители, полосовые фильтры, сумматоры, ограничители напряжений, фазовращатели и синхронные детекторы, входящие в преобразовательные блоки могут быть выполнены по схемам, приведенным в работах (Фолькенберри Л. Применение операционных усилителей в линейных ИС.- М.: Мир, 1985; Дж. Грэм, Дж. Тоби, Л. Хьюлсман. Проектирование и применение операционных усилителей.- М. : Мир, 1974). Коммутатор может быть выполнен на микросхемах типа 590КН3 и 564ИЕ10, делитель частоты - на микросхеме типа 564ИЕ10, а генератор переменных напряжений и усилители модулей напряжений могут быть выполнены по схемам, приведенным в работе (Гуткин В.С. Применение операционных усилителей в измерительной технике. Л.: Энергия. 1975, с. 67, 73).



Изобретение относится к области измерительной техники и может быть использовано для определения положения объекта в системах управления. Техническим результатом является реализация бесконтактной связи между приемным и передающим приборами при упрощении используемых устройств. Изобретение по первому варианту содержит генератор переменных напряжений с катушками индуктивности, размещенные на объекте, трехкомпонентный датчик, три усилителя переменных напряжений, три преобразовательных блока, формирователь опорных напряжений и коммутатор. Второй вариант устройства дополнительно содержит два трехкомпонентных датчика, шесть усилителей переменных напряжений и шесть преобразовательных блоков. 2 с.п. ф-лы, 4 ил.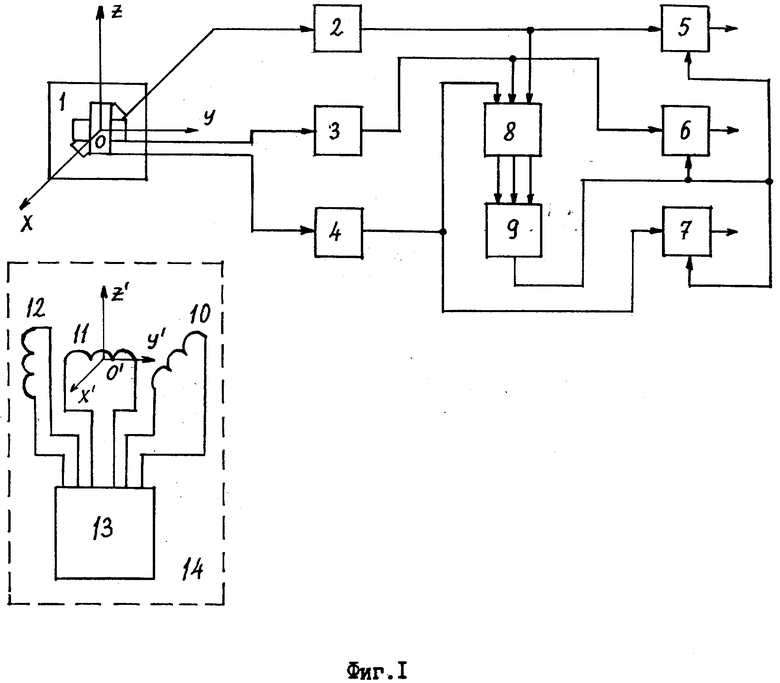
| Смирнов Б.М | |||
| Магнитометрический метод определения углового положения объекта | |||
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| - М.: Издательство стандартов, с.34 - 37 | |||
| Чернышев Е.Т | |||
| и др | |||
| Магнитные измерения | |||
| - М.: Издательство Комитета стандартов и измерительных приборов, 1969, с.41 - 42 | |||
| Смирнов Б.М | |||
| Метод определения координат и магнитного момента дипольного источника поля | |||
| - Измерительная техника, N 9, 1988, - М.: Издательство стандартов, с.40 - 42 | |||
| Способ определения магнитного момента дипольного источника поля и координат точки приложения этого момента | 1982 |
|
SU1064251A1 |

