Изобретение относится к области измерительной техники, навигации и предназначено для определения местоположения и ориентации различных объектов, в том числе и беспилотных летательных аппаратов, относительно источника переменного вращающегося магнитного поля.
Определение координат подвижного объекта в искусственном магнитном поле заключается в генерации магнитного поля с известными пространственными и временными зависимостями в зоне движения объекта, измерении характеристик этого поля, например, с использованием магнитометрических датчиков, и вычислении координат подвижного объекта [Желамский М.В. Электромагнитное позиционирование подвижных объектов. - М.: ФИЗМАТЛИТ, 2013, с. 7]
Известно устройство, определения координат [Shuang Song, Chao Hu, Baopu Li, Xiaoxiao Li, Max Q.-H. Meng An Electromagnetic localization and orientation method based on rotating magnetic dipole // IEEE Transactions on magnetics, Vol. 49, №3, march 2013. - P.1274-1277], содержащее источник магнитного поля, создаваемого двумя катушками индуктивности, расположенными ортогонально, подключенными к источнику тока со сдвигом фаз  друг относительно друга. Создаваемое магнитное поле эквивалентно полю вращающегося магнитного диполя. Измерительное устройство состоит из трех ортогональных магнитометрических датчиков, расположенных на подвижном объекте. Измерительное устройство соединено с блоком измерения амплитуд и блоком измерения разности фаз, которые соединены с блоком определения координат. Для измерения начальных фаз используется метод фазовой синхронизации источника магнитного поля и приемника. Синхронизация достигается путем передачи опорного сигнала, формируемого наземной аппаратурой, по проводному каналу связи.
друг относительно друга. Создаваемое магнитное поле эквивалентно полю вращающегося магнитного диполя. Измерительное устройство состоит из трех ортогональных магнитометрических датчиков, расположенных на подвижном объекте. Измерительное устройство соединено с блоком измерения амплитуд и блоком измерения разности фаз, которые соединены с блоком определения координат. Для измерения начальных фаз используется метод фазовой синхронизации источника магнитного поля и приемника. Синхронизация достигается путем передачи опорного сигнала, формируемого наземной аппаратурой, по проводному каналу связи.
Недостатком этого устройства является малая дальность применения, связанная с наличием проводного канала связи.
Наиболее близким по технической сущности и достигаемому техническому результату является устройство для определения координат подвижного объекта с использованием магнитного поля (прототип) [RU 2713456 С1, 05.02.2020], состоящее из наземной части в составе источника гармонического сигнала, двух катушек индуктивности, расположенных ортогонально, фазовращателя на  ключевой схемы и блока управления, и бортовой части в составе датчика магнитного поля, блока определения режимов работы наземной части, трех ключевых схем, генератора опорного сигнала, блоков измерения амплитуды и разности фаз и блока вычисления координат.
ключевой схемы и блока управления, и бортовой части в составе датчика магнитного поля, блока определения режимов работы наземной части, трех ключевых схем, генератора опорного сигнала, блоков измерения амплитуды и разности фаз и блока вычисления координат.
Синхронизация фазы сигнала, формируемого наземным источником переменного магнитного поля, и опорного сигнала, формируемого в мобильной части устройства реализуется за счет создания в пространстве попеременно то поля синхронизации, то поля навигации. При этом, поле синхронизации создают с помощью одной катушки индуктивности, а поле навигации создают с помощью двух катушек индуктивности, расположенных взаимно перпендикулярно и одна из них подключена к источнику тока со сдвигом фаз . В прототипе определение координат объекта навигации с высокой точностью может быть проведено только в первом октанте координатного пространства, которое ограничено плоскостями XOY, ZOY и XOZ, когда совпадают фаза магнитного поля катушки индуктивности, расположенной вдоль оси X и фаза магнитного поля катушки индуктивности, расположенной вдоль оси Z. В остальных октантах (II - VIII) это условие не выполняется, что существенно снижает координатное пространство области применения устройства навигации.
Техническим результатом изобретения является расширение координатного пространства области применения, где могут решаться навигационные задачи с высокой точностью с помощью устройства магнитометрической локальной навигации.
Технический результат достигается тем, что в известное устройство, содержащее стационарный источник переменного вращающегося магнитного поля в составе последовательно соединенных источника гармонического сигнала и фазовращателя, а также ортогонально размещенных первой и второй катушек индуктивности, и мобильную часть в составе датчика магнитного поля и последовательно соединенных блока аналого-цифрового преобразования сигналов, и блока вычисления координат, при этом первая катушка индуктивности соединена с объединенным выходом источника гармонического сигнала, а вторая катушка с выходом фазовращателя, дополнительно введены последовательно соединенные делитель частоты и третья катушка индуктивности, размещенная взаимно ортогонально относительно первой и второй катушек индуктивности, шесть полосовых фильтров, три из которых настроены на частоту навигационного поля, а три - на его четную субгармонику, а также последовательно соединенные сумматор сигналов и формирователь синхроимпульсов, выход которого соединен со вторым входом блока вычисления координат, при этом, первый, второй и третий выходы датчика магнитного поля соединены с объединенными входами соответствующей пары полосовых фильтров, один из которых настроен на частоту навигационного поля, а второй - на его четную субгармонику, кроме того, выходы первого, второго и третьего полосовых фильтров, настроенных на частоту навигационного поля, соединены с соответствующими входами аналого-цифрового преобразователя, а выходы четвертого, пятого и шестого полосовых фильтров, настроенных на четную субгармонику частоты навигационного поля, соединены с первым, вторым и третьим входами сумматора сигналов, кроме того вход делителя частоты соединен с объединенным выходом источника гармонического сигнала.
Сущность изобретения заключается в том, что дополнительно введены последовательно соединенные делитель частоты и третья катушка индуктивности, размещенная взаимно ортогонально относительно первой и второй катушек индуктивности, шесть полосовых фильтров, три из которых настроены на частоту навигационного поля, а три - на его четную субгармонику, а также последовательно соединенные сумматор сигналов и формирователь синхроимпульсов, выход которого соединен со вторым входом блока вычисления координат, при этом, первый, второй и третий выходы датчика магнитного поля соединены с объединенными входами соответствующей пары полосовых фильтров, один из которых настроен на частоту навигационного поля, а второй - на его четную субгармонику, кроме того, выходы первого, второго и третьего полосовых фильтров, настроенных на частоту навигационного поля, соединены с соответствующими входами аналого-цифрового преобразователя, а выходы четвертого, пятого и шестого полосовых фильтров, настроенных на четную субгармонику частоты навигационного поля, соединены с первым, вторым и третьим входами сумматора сигналов, кроме того вход делителя частоты соединен с объединенным выходом источника гармонического сигнала.
Таким образом, в пространстве одновременно существует суперпозиция двух магнитных полей - навигационного и сихронизации. Причем, для переменного поля синхронизации точки перехода через ноль во всем пространстве синхронизированы по времени с начальной фазой магнитного поля навигации.
В мобильной части устройства из сигнала, поступающего с датчика магнитного поля, с помощью полосовых фильтров выделяют сигналы с частотой поля навигации для каждой компоненты магнитного поля X, Z и Y и сигналы с частотой поля синхронизации. С использованием выделенных сигналов с частотой синхронизации формируют синхроимпульсы, которые предназначены для измерения сдвига фаз и амплитуд компонентов X, Z и Y магнитного поля навигации. Измеренные шесть параметров навигационного магнитного поля используют для вычисления шести координат объекта навигации: трех линейных и трех угловых.
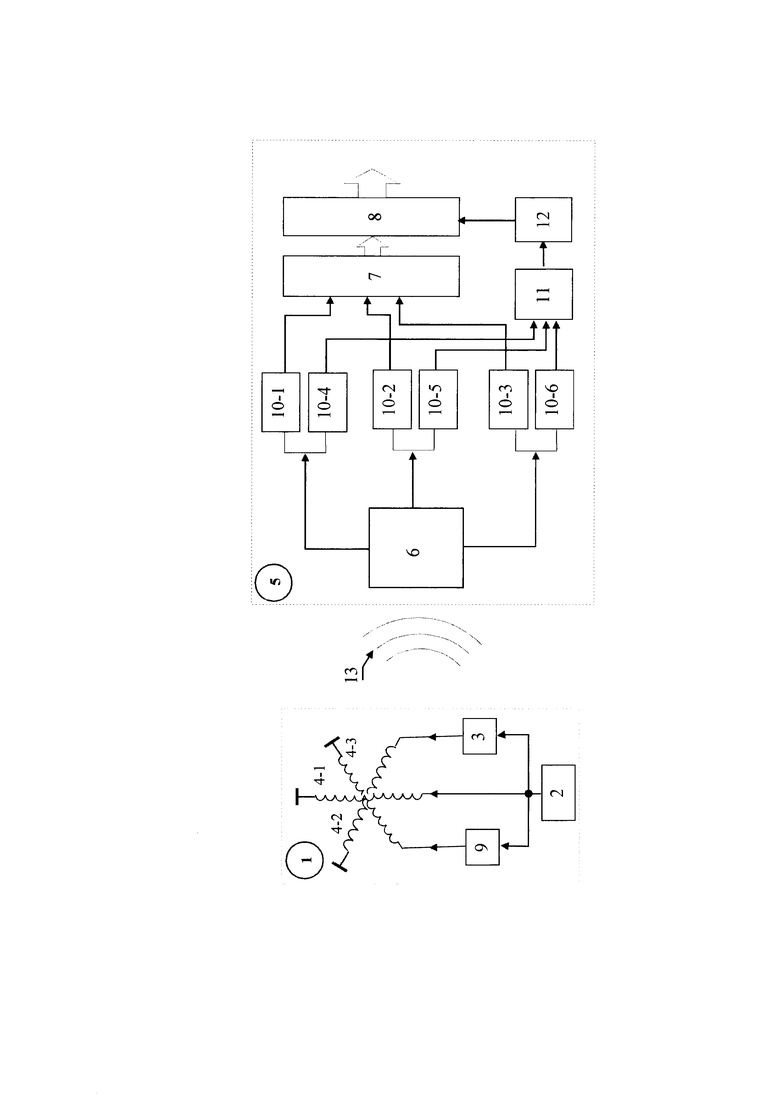
На фигуре приведена структурная схема магнитометрической локальной навигации, где обозначены:
1 - стационарный источник переменного вращающегося магнитного поля;
2 - источник гармонического сигнала;
3 - фазовращатель;
4-1, 4-2, 4-3 - катушки индуктивности;
5 - мобильная часть;
6 - датчик магнитного поля;
7 - аналого-цифровой преобразователь;
8 - блок вычисления координат;
9 - делитель частоты;
10-1, 10-2, 10-3 - полосовые фильтры, настроенные на частоту навигационного поля;
10-4, 10-5, 10-6 - полосовые фильтры, настроенные на четную субгармонику частоты навигационного поля (частоту поля синхронизации);
11 - сумматор сигналов;
12 - формирователь синхроимпульсов;
13 - условное обозначение суперпозиции переменного вращающегося магнитного поля и поля синхронизации.
Устройство работает следующим образом. Первую 4-1, вторую 4-2 и третью 4-3 катушки индуктивности, и размещают взаимно ортогонально. С источника гармонического сигнала 2 одновременно подают сигнал на первую катушки индуктивности 4-1, фазовращатель 3 и делитель частоты 9.
С фазовращателя 3 сигнал, сдвинутый по фазе на  , подают на вторую катушку индуктивности 4-2. С делителя частоты сигнал, с частотой четной субгармоники, подают на третью катушку индуктивности 4-3. Первая и вторая катушки индуктивности создают в пространстве навигационное вращающееся переменное магнитное поле. Третья катушка индуктивности 4-3 создает в пространстве магнитное поле синхронизации, причем для него точки перехода через ноль во всем пространстве синхронизированы по времени с вращающемся переменным магнитным полем навигации, создаваемого катушками 4-1 и 4-2.
, подают на вторую катушку индуктивности 4-2. С делителя частоты сигнал, с частотой четной субгармоники, подают на третью катушку индуктивности 4-3. Первая и вторая катушки индуктивности создают в пространстве навигационное вращающееся переменное магнитное поле. Третья катушка индуктивности 4-3 создает в пространстве магнитное поле синхронизации, причем для него точки перехода через ноль во всем пространстве синхронизированы по времени с вращающемся переменным магнитным полем навигации, создаваемого катушками 4-1 и 4-2.
Таким образом, в отличие от прототипа в пространстве формируют дополнительно поле синхронизации на частоте четной субгармоники навигационного поля. Фаза этого поля синхронизации однозначно известна во всех во всех восьми октантах переменное магнитное поле с известной величиной фазы.
Датчик магнитного поля 6 размещают на объекте навигации в мобильной части устройства 5. С помощью датчика магнитного поля 6 преобразуют компоненты X, Z и Y магнитных полей навигационного поля и поля синхронизации в сумму напряжений пропорциональных эти полям: навигационному и синхронизации (UXH+UXC), (UZH+UZC) и (UYH+UYC) соответственно. С датчика магнитного поля 6 сигнал подают на 6 полосовых фильтров. При этом, полосовые фильтры 10-1, 10-2 и 10-3 с центральными частотами равными частоте навигационного поля FH, выделяют напряжения UXH, UZH и UYH и подают на аналого-цифровой преобразователь 7, с которого оцифрованный сигнал подают на вход блока вычисления координат 8. Полосовые фильтры 10-4, 10-5 и 10-6 с центральной частотой равной частоте поля синхронизации FC, выделяют напряжения UXC, UZC и UYC, и подают на сумматор 11 с выхода которого, сигнал подают на формирователь синхроимпульсов 12. С выхода формирователя синхроимпульсов 12 сигнал подают на блок вычисления координат 8.
Делитель частоты предназначен для получения субгармоник сигнала поступающего с выхода источника гармонического сигнала 2. Делитель уменьшает частоту сигнала источника 2 в четное число раз.
Делитель частоты 9 может быть выполнен с использованием счетных Т-триггеров [https://digteh.ru/Sxemoteh/dig/Count/]. Датчик магнитного поля 6 может быть изготовлен на основе трех феррозондовых магнитометров DRV425 [https://www.directindustry.com.ru/prod/texas-instruments-semiconductor/produ.ct-33647-2210533.html].
Полосовые фильтры 10-1, 10-2, 10-3, настроенные на частоту навигационного поля и полосовые фильтры 10-4,10-5,10-6, настроенные на четную субгармонику частоты навигационного поля предназначены для выделения напряжений с частотами навигационного поля и синхронизации, соответственно. Полосовые фильтры 10-1,10-2,10-3,10-4,10-5 и 10-6 могут быть изготовлены на основе операционных усилителей, например [https://eax.me/active-fillers/].
Аналого-цифровой преобразователь 7 и блок вычисления координат 8 могут быть выполнены на базе одноплатного компьютера Raspberry Pi 4 Model В [https://amperka.ru/product/raspberry-pi-4-model-b-4-gb] с платой расширения АЦП/ЦАП для Raspberry Pi (AD/DA) [https://miniboard.com.ua/platy-rasshireniya/184-acpcap-plata-rasshireniya-dlya-raspberry-pi-adda.html].
Сумматор сигналов 11 может быть выполнен на основе инструментального операционного усилителя, например, IN118. Формирователь синхроимпульсов 12 может быть выполнен на основе компаратора, например, LM393N/NOPB [https://www.chipdip.ru/catalog/ic-comparators?p.0=Texas+Instruments].
Таким образом, изобретение позволяет реализовать синхронизацию сигналов стационарной и мобильной частей устройства локальной навигации во всей области пространства существования навигационного поля, т.е. обеспечивается расширение координатного пространства области применения, где могут решаться навигационные задачи с высокой точностью с помощью устройства магнитометрической локальной навигации.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТОМЕТРИЧЕСКАЯ СИСТЕМА НАВИГАЦИИ | 2024 |
|
RU2824864C1 |
| УСТРОЙСТВО МАГНИТОМЕТРИЧЕСКОЙ СИСТЕМЫ ЛОКАЛЬНОЙ НАВИГАЦИИ | 2024 |
|
RU2835981C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНОГО ОБЪЕКТА С ИСПОЛЬЗОВАНИЕМ МАГНИТНОГО ПОЛЯ | 2019 |
|
RU2713456C1 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ НИЗКОЧАСТОТНОГО НАВИГАЦИОННОГО МАГНИТНОГО ПОЛЯ | 2024 |
|
RU2829941C1 |
| МАГНИТОМЕТРИЧЕСКИЙ КОМПЛЕКС ДЛЯ НАВИГАЦИИ ОБЪЕКТОВ В ПРОСТРАНСТВЕ | 2023 |
|
RU2808125C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ И УГЛОВОГО ПОЛОЖЕНИЯ ОБЪЕКТА (ЕГО ВАРИАНТЫ) | 1997 |
|
RU2119171C1 |
| ВЕКТОРНЫЙ МАГНИТОМЕТР НА ОСНОВЕ ДИСКОВОГО ЖИГ РЕЗОНАТОРА И СПОСОБ ОПРЕДЕЛЕНИЯ ВЕКТОРА МАГНИТНОГО ПОЛЯ | 2013 |
|
RU2529440C1 |
| Способ измерения полуосей полного эллипса поляризации магнитного поля и устройство для его осуществления | 2021 |
|
RU2793393C1 |
| ЛОКАЛЬНАЯ ФАЗОВАЯ РАЗНОСТНО-ДАЛЬНОМЕРНАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2604652C2 |
| МАГНИТОМЕТРИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ТЕЛА (ЕГО ВАРИАНТЫ) | 1996 |
|
RU2130619C1 |
Изобретение относится к области измерительной техники, навигации и предназначено для определения местоположения и ориентации различных объектов, в том числе и беспилотных летательных аппаратов, относительно источника переменного вращающегося магнитного поля. Техническим результатом изобретения является расширение координатного пространства области применения, где могут решаться навигационные задачи с высокой точностью с помощью устройства магнитометрической локальной навигации. Устройство магнитометрической локальной навигации дополнительно содержит последовательно соединенные делитель частоты и третью катушку индуктивности, шесть полосовых фильтров, а также последовательно соединенные сумматор сигналов и формирователь синхроимпульсов. Третья катушка индуктивности размещена взаимно ортогонально относительно первой и второй катушек индуктивности. Три из шести полосовых фильтров настроены на частоту навигационного поля, а три - на его четную субгармонику. Выход формирователя синхроимпульсов соединен со вторым входом блока вычисления координат. Первый, второй и третий выходы датчика магнитного поля соединены с объединенными входами соответствующей пары полосовых фильтров, один из которых настроен на частоту навигационного поля, а второй - на его четную субгармонику. Выходы первого, второго и третьего полосовых фильтров, настроенных на частоту навигационного поля, соединены с соответствующими входами аналого-цифрового преобразователя, а выходы четвертого, пятого и шестого полосовых фильтров, настроенных на четную субгармонику частоты навигационного поля, соединены с первым, вторым и третьим входами сумматора сигналов. Вход делителя частоты соединен с объединенным выходом источника гармонического сигнала. 1 ил.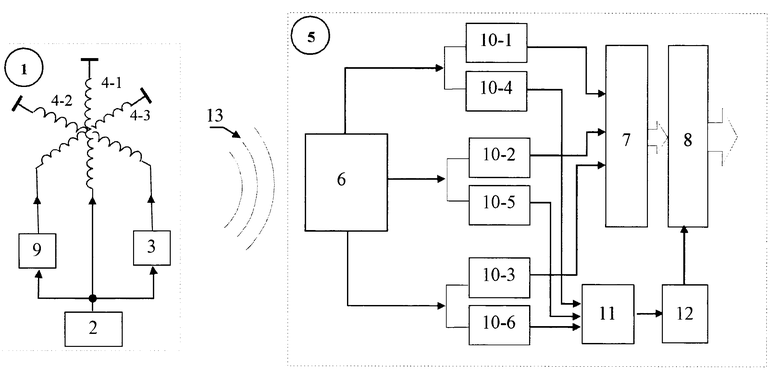
Устройство магнитометрической локальной навигации, содержащее стационарный источник переменного вращающегося магнитного поля в составе последовательно соединенных источника гармонического сигнала и фазовращателя, а также ортогонально размещенных первой и второй катушек индуктивности, и мобильную часть в составе датчика магнитного поля и последовательно соединенных блока аналого-цифрового преобразования сигналов и блока вычисления координат, при этом первая катушка индуктивности соединена с объединенным выходом источника гармонического сигнала, а вторая катушка - с выходом фазовращателя, отличающееся тем, что дополнительно введены последовательно соединенные делитель частоты и третья катушка индуктивности, размещенная взаимно ортогонально относительно первой и второй катушек индуктивности, шесть полосовых фильтров, три из которых настроены на частоту навигационного поля, а три - на его четную субгармонику, а также последовательно соединенные сумматор сигналов и формирователь синхроимпульсов, выход которого соединен со вторым входом блока вычисления координат, при этом первый, второй и третий выходы датчика магнитного поля соединены с объединенными входами соответствующей пары полосовых фильтров, один из которых настроен на частоту навигационного поля, а второй - на его четную субгармонику, кроме того, выходы первого, второго и третьего полосовых фильтров, настроенных на частоту навигационного поля, соединены с соответствующими входами аналого-цифрового преобразователя, а выходы четвертого, пятого и шестого полосовых фильтров, настроенных на четную субгармонику частоты навигационного поля, соединены с первым, вторым и третьим входами сумматора сигналов, кроме того, вход делителя частоты соединен с объединенным выходом источника гармонического сигнала.
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНОГО ОБЪЕКТА С ИСПОЛЬЗОВАНИЕМ МАГНИТНОГО ПОЛЯ | 2019 |
|
RU2713456C1 |
| ЛОКАЛЬНАЯ СИСТЕМА МОНИТОРИНГА МЕСТОПОЛОЖЕНИЯ И ПАРАМЕТРОВ ДВИЖЕНИЯ СПОРТСМЕНОВ И СПОРТИВНЫХ СНАРЯДОВ | 2018 |
|
RU2691947C1 |
| СПОСОБ ПЕРСОНАЛЬНОЙ АВТОНОМНОЙ НАВИГАЦИИ | 2013 |
|
RU2523753C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА (ЕГО ВАРИАНТЫ) | 1996 |
|
RU2103664C1 |
| US 9947100 B2, 17.04.2018 | |||
| JP 2007093360 A, 12.04.2007 | |||
| US 11187540 B2, 30.11.2021 | |||
| SHUANG SONG, CHAO HU, BAOPU LI, XIAOXIAO LI, MAX Q.-H | |||
| MENG An Electromagnetic localization and orientation method based on rotating magnetic dipole // IEEE | |||

