Изобретение относится к навигационной технике, а именно к способам бесплатформенной инерциальной навигации малогабаритных движущихся объектов с использованием микромеханических чувствительных элементов (акселерометры, гироскопы, магнитометры).
Известен способ бесплатформенной навигации [1], согласно данному способу на борту подвижного объекта устанавливают n тетрад микромеханических гироскопов и n тетрад микромеханических акселерометров, которые располагают осями чувствительности вдоль диагоналей куба одной механической базы, грани которого ориентируют параллельно ортогональным осям объекта, а выходные сигналы тетрад преобразуют в проекции сигналов, действующих на ортогональную систему координат объекта, полученные сигналы фильтруют и вычисляют навигационные параметры ориентации. Недостатком этого способа является сложность установки чувствительных элементов внутри куба механической базы вдоль его диагоналей. Погрешность в установке чувствительных элементов ограничивает точность навигации.
Известны также микромеханическое электронное инерциальное навигационное устройство и способ навигации, принятый за прототип [2]. Согласно способу, реализованного в устройстве на механической базе в виде куба устанавливают n чувствительных элементов, каждый из которых содержит n датчиков физических величин, при этом устанавливают чувствительные элементы на гранях куба и ориентируют оси чувствительности датчиков под углом α=35,26° к поверхности нижней грани куба, выходные сигналы датчиков преобразуют в проекции сигналов на оси ортогональной системы координат Xo, Yo, Zo с масштабным коэффициентом К0=Cos(90-α)=0,578, при этом ориентируют оси Хо и Yo вдоль диагоналей верхней грани куба, а ось Zo ориентируют перпендикулярно к центру верхней грани куба на пересечении ее диагоналей, затем полученные сигналы суммируют по каждой из осей Хо, Yo, Zo и вычитают вычисляют параметры навигации объекта, на котором устанавливают куб.
Недостатком данного способа наличие только одного масштабного коэффициента К0, по которому определяют проекцию сигнала датчика на одну из осей Xo, Yo, Zo, то есть учитывают проекции сигналов только тех датчиков, оси чувствительности которых находятся под углом α=35,26° к осям Xo, Yo, Zo. При этом возможны проекции сигналов датчиков на оси Хо, Yo, Zo под другими, неравными а, углами, которые не учитываются.
Заявляемое изобретение решает задачу обеспечения учета всех возможных проекций измеренных сигналов датчиков на ортогональные оси объекта Xo, Yo, Zo.
Техническим результатом заявленного изобретения является повышение точности определения параметров навигации объекта за счет существенного увеличения числа суммируемых данных о действующих на объект физических величинах.
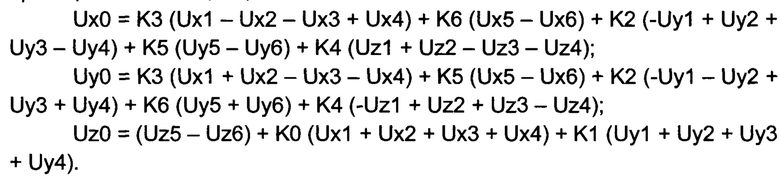
Для решения поставленной задачи в способ навигации, согласно которому на механической базе в виде куба, расположенной на движущемся объекте, устанавливают N чувствительных элементов, каждый из которых содержит n датчиков физических величин, на грани куба и ориентируют оси чувствительности датчиков, расположенных на боковых гранях куба, под углом α=35,26° к поверхности нижней грани куба, выходные сигналы датчиков преобразуют в проекции сигналов на оси ортогональной системы координат Xo, Yo, Zo с масштабным коэффициентом К0=Cos(90-α), при этом ориентируют оси Хо и Yo вдоль диагонали верхней грани куба, а ось Zo ориентируют перпендикулярно к центру верхней грани куба, после чего полученные сигналы суммируют по каждой из осей Xo, Yo, Zo и вычисляют параметры навигации объекта, введены операции, согласно которым применяют трехосные датчики физических величин, оси чувствительности которых расположены относительно корпуса чувствительного элемента вдоль ортогональной системы координат X, Y, Z, при этом N штук чувствительных элементов состоят из m групп из шести чувствительных элементов. Чувствительные элементы одной группы располагают на шести гранях куба и ориентируют их оси Z перпендикулярно к плоскостям грани куба, четыре из группы чувствительных элементов 1,2, 3, 4 размещают на боковых гранях куба, ось Х5 датчика пятого чувствительного элемента, расположенного на верхней грани куба, ориентируют под углом 45°-α относительно оси Хо и под углом 45°+α относительно оси Yo, а шестой чувствительный элемент располагают на нижней грани куба с наклоном оси чувствительности Х6 датчика по отношению к оси Хо на угол 135°+α, а по отношению к оси Yo на угол 135°-а, при этом вводят масштабные коэффициенты

после чего вычисляют уровни сигналов, приведенных к осям Xo, Yo, Zo путем суммирования сигналов всех шести чувствительных элементов по их трем осям Uxi, Uyi, Uzi с учетом масштабных коэффициентов и знаков их проекций на оси Xo, Yo, Zo
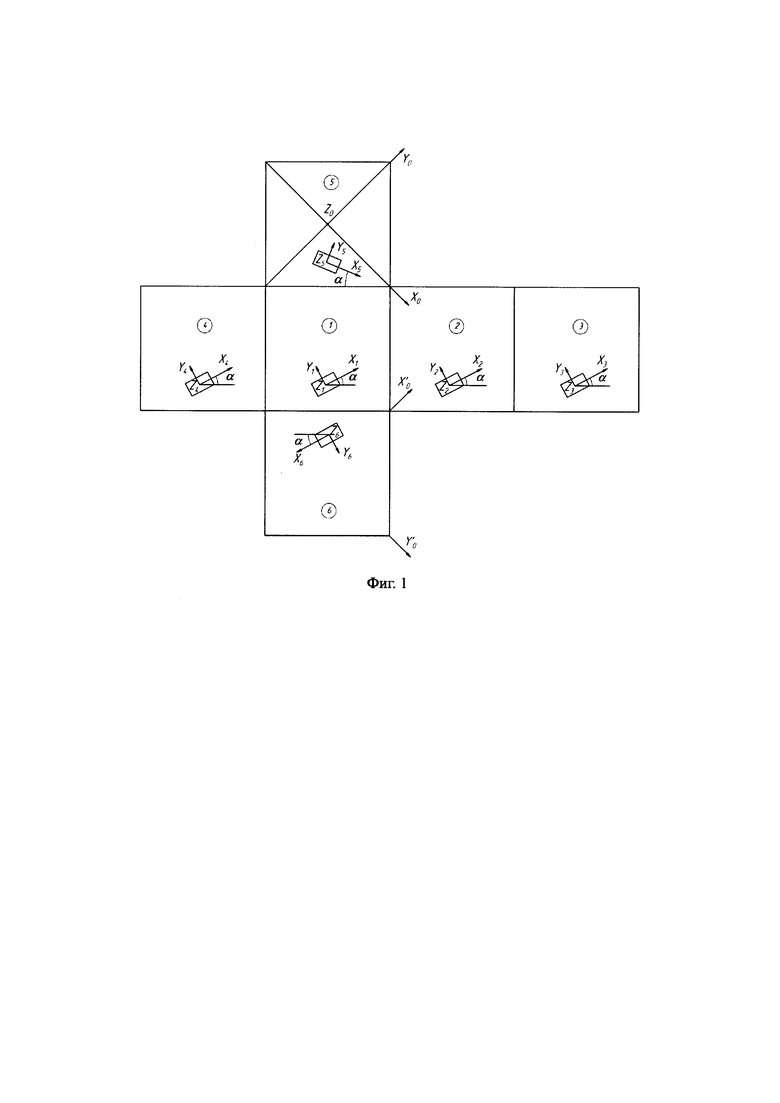
Сущность предлагаемого изобретения поясняется на Фиг. 1, на которой показана развертка на одну плоскость граней куба 1, 2, 3, 4, 5, 6 с указанием размещения под углом а корпусов чувствительных элементов по отношению к ребрам куба, оси Xo, Yo, Zo являются осями ортогональных координат куба, а оси Xi, Yi, Zi - ортогональные оси чувствительности чувствительного элемента.
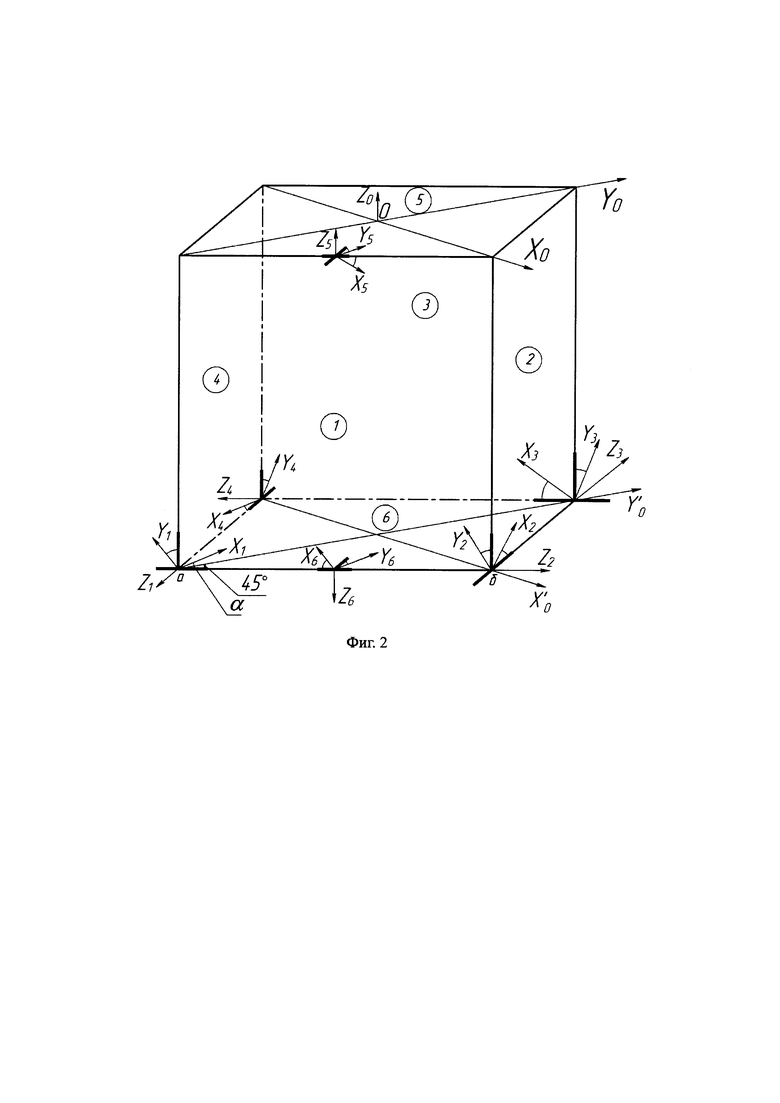
На Фиг. 2 показано трехмерное изображение куба с указанием направлений осей чувствительности датчиков шести чувствительных элементов. Оси Хо' и Yo' являются вспомогательными осями, расположенными на нижней грани куба параллельно осям Xo, Yo.
Как показано на Фиг. 2, сигналы датчиков, исключая датчики с осями Z5 и Z6, имеют проекции на все 3 оси Xo, Yo, Zo. Относительная величина проекций учитывается введенными масштабными коэффициентами К5+К6 а знак проекции определяется согласно Фиг. 2 направлением проекции относительно осей Xo, Yo, Zo. Так, например, проекция сигнала оси X на ось Хо определяется сначала проекцией сигнала на лежащего в плоскости XoUYo ребро «аб» Х1аб=X1Cos α, а затем проекцией сигнала Х1аб на ось Хо Х1х0=Х1аб⋅Cos45°=Cos α Cos45°X1=КЗХ1. При этом найденная проекция совпадает по направлению с осью Хо, поэтому она имеет положительный знак. Аналогичным образом находятся остальные проекции измеренных сигналов на оси Xo, Yo, Zo. Необходимо отметить, что масштабные коэффициенты К0+К6 выражаются через угол а в общем виде. Поэтому при реализации данного способа можно установить угол а не обязательно равным величине 35,26°, что трудно осуществить на практике. Можно выбрать величину угла α равной 30°; 35°; 40°; 45°, что физически гораздо проще осуществить. при этом согласно формулам Ux0, Uy0, Uz0 можно получить достоверный результат измерений.
Шесть триад чувствительных элементов образуют в сумме 18 сигналов, описывающих влияние физической величины. Однако при применении заявляемого способа образуется в сумме 42 проекции сигналов на оси Xo, Yo, Zo. Это позволяет получить измерительную систему с высокой избыточностью и высоким коэффициентом использования измерительных осей микромеханических чувствительных элементов. Суммирование большого количества измерительных данных приводит к повышению точности, так как случайная погрешность измерения обратно пропорционально корню квадратному из числа измерений, а систематическая погрешность также уменьшается за счет наличия проекций измерений, действующих встречно вдоль осей Xo, Yo, Zo.
Применение заявляемого способа позволяет, используя приведенные формулы, эффективно преобразовать сигналы чувствительных элементов с повышенной точностью в проекции вектора измеряемой физической величины на ортогональные оси подвижного объекта. При этом угол наклона корпуса чувствительных элементов на грани куба к его грани может быть выбран произвольно, как это удобно изготовителю в диапазоне 30÷45°.
Список литературы
1. Патент РФ 2577567.
Авторы: Мумин О.Л. и другие. Способ бесплатформенной инерционной навигации на микромеханических чувствительных элементах.
2. Патент КНР от 2020-09-03 ЕРО patent: CN202078615.
Авторы: S. ZIochevskiy и другие. Micromechanical electronic inertial navigation apparatus and navigation method thereof.
Publication of WO2020143846A3.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ НА МИКРОМЕХАНИЧЕСКИХ ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ | 2015 |
|
RU2577567C1 |
| Способ измерения параметров угловой скорости и ускорения микромеханическими гироскопами и акселерометрами | 2024 |
|
RU2831095C1 |
| СПОСОБ СЧИСЛЕНИЯ КООРДИНАТ ПРИ НЕОРТОГОНАЛЬНОЙ ОРИЕНТАЦИИ ВХОДНЫХ ОСЕЙ ИЗМЕРИТЕЛЕЙ ПАРАМЕТРОВ УГЛОВОГО ДВИЖЕНИЯ | 2020 |
|
RU2785971C2 |
| Способ комплексирования бесплатформенных инерциальных навигационных систем | 2019 |
|
RU2708901C1 |
| БЕСПЛАТФОРМЕННЫЙ ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ БЛОК | 2000 |
|
RU2162203C1 |
| Бесплатформенный инерциальный измерительный блок | 2023 |
|
RU2797150C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ ОБЪЕКТА И БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2017 |
|
RU2661446C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2010 |
|
RU2464617C2 |
| КОМПЛЕКТ ЛАБОРАТОРНОГО ОБОРУДОВАНИЯ ДЛЯ ИЗУЧЕНИЯ ИЗБЫТОЧНОГО БЛОКА ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ МОДУЛЕЙ | 2024 |
|
RU2817519C1 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ НАВИГАЦИИ НА ВОДЕ | 2011 |
|
RU2497078C2 |
Изобретение относится к способам бесплатформенной инерциальной навигации малогабаритных движущихся объектов. Сущность: устанавливают на механической базе в виде куба N чувствительных элементов, каждый из которых содержит n датчиков физической величины. Ориентируют оси чувствительности датчиков, расположенных на боковых гранях куба, под углом  к поверхности нижней грани куба. Выходные сигналы датчиков преобразуют в проекции сигналов на оси ортогональной системы координат Xo, Yo, Zo с масштабным коэффициентом
к поверхности нижней грани куба. Выходные сигналы датчиков преобразуют в проекции сигналов на оси ортогональной системы координат Xo, Yo, Zo с масштабным коэффициентом  . При этом оси Xo, Yo ориентируют вдоль диагоналей верхней грани куба, а ось Zo - перпендикулярно к центру этой грани. Полученные сигналы суммируют и вычисляют навигационные параметры движения объекта. Технический результат: повышение точности определения параметров навигации объекта. 2 ил.
. При этом оси Xo, Yo ориентируют вдоль диагоналей верхней грани куба, а ось Zo - перпендикулярно к центру этой грани. Полученные сигналы суммируют и вычисляют навигационные параметры движения объекта. Технический результат: повышение точности определения параметров навигации объекта. 2 ил.
Способ бесплатформенной инерциальной навигации на микромеханических чувствительных элементах, согласно которому на механической базе в виде куба устанавливают N чувствительных элементов, каждый из которых содержит n датчиков физической величины, на грани куба и ориентируют оси чувствительности датчиков, расположенных на боковых гранях куба, под углом α к поверхности нижней грани куба, выходные сигналы датчиков преобразуют в проекции сигналов на оси ортогональной системы координат Xo, Yo, Zo с масштабным коэффициентом К0=Cos(90-α)=Sinα, при этом ориентируют оси Хо и Yo вдоль диагоналей верхней грани куба, а ось Zo ориентируют перпендикулярно к центру верхней грани куба, после чего полученные сигналы суммируют и вычисляют навигационные параметры движения объекта, отличающийся тем, что введены операции, согласно которым применяют трехосные датчики физических величин, имеющих оси чувствительности, расположенные относительно корпуса чувствительного элемента вдоль ортогональной системы координат X, Y, Z, при этом N штук чувствительных элементов состоят из m групп из шести чувствительных элементов, чувствительные элементы одной группы располагают на шести гранях куба и ориентируют их оси Z перпендикулярно к плоскостям граней куба, четыре из группы чувствительных элементов 1, 2, 3, 4 размещают на боковых гранях куба, а их оси X1, Х2, Х3, Х4 устанавливают одинаково под углом α к нижней грани куба, ось Х5 датчика пятого чувствительного элемента, расположенного на верхней грани куба, ориентируют под углом 45°-α относительно оси Хо и под углом 45°+α относительно оси Yo, а шестой чувствительный элемент располагают на нижней грани куба с наклоном оси чувствительности Х6 датчика по отношению к оси Хо на угол 135°+α, а по отношению к оси Yo на угол 135°-α, при этом вводят масштабные коэффициенты 
 ,
,
после чего вычисляют уровни сигналов, приведенных к осям Хо, Yo, Zo, путем суммирования сигналов всех 6 чувствительных элементов по их трем осям Uxi, Uyi, Yzi с учетом масштабных коэффициентов и знаков их проекции на оси Хо, Yo, Zo: 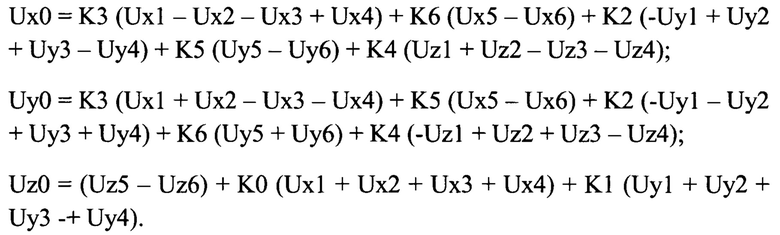
| WO 2020143846 A2, 16.07.2020 | |||
| СПОСОБ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ НА МИКРОМЕХАНИЧЕСКИХ ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ | 2015 |
|
RU2577567C1 |
| RU 2017130659 А, 01.03.2019 | |||
| US 20110209544 A1, 01.09.2011. | |||

