Изобретение относится к измерительной технике, а именно к способам измерения параметров угловой скорости и ускорения микромеханическими гироскопами и акселерометрами применительно к навигации подвижных объектов и может быть использовано при гирокомпасировании автономной (без внешней информации) выставки платформы в азимуте и применимо в геодезии, навигации, топографии, системах прицеливания и наведения. Технический результат - повышение точности и сокращение времени определения азимута.
Известен способ определения направления на север с помощью микромеханического гироскопа [1]. Согласно данному способу размещают одноосный микромеханический гироскоп и одноосный микромеханический акселерометр таком образом, что их оси чувствительности находятся в одной плоскости перпендикулярно друг к другу вдоль осей х и у, а вокруг оси z, перпендикулярной плоскости, производят вращение гироскопа и акселерометра. Вращение гироскопа позволяет уменьшить систематические погрешности гироскопа и повысить соотношение сигнал - шум. С помощью акселерометра определяют точное угловое положение гироскопа при его вращении. Кроме того, для повышения точности измерения применяют метод фильтрации Калмана и метод наименьших квадратов. Однако с помощью такого способа определяют только один угол направления на север, при этом нет информации об угле тангажа и крена движущегося объекта, кроме того неизвестны проекции вектора ускорения, действующие на ортогональные оси подвижного объекта. Также в способе не заложена избыточность в получении информации, когда выход из строя, например, акселерометра, приводит к остановке процесса измерений. Поэтому данный способ мало пригоден для получения полной навигации движущегося объекта.
Известен способ измерений параметров угловой скорости и ускорения от двух блоков микромеханических гироскопов при решении задачи ориентации [2]. Согласно данному способу, на борту подвижного объекта устанавливают три модуля, причем первый и второй модуль содержат триаду гироскопов, третий модуль содержит триаду акселерометров, при этом первые два модуля вращают вокруг осей, измеряют углы поворота модулей, а сами оси располагают перпендикулярно друг к другу, третий модуль неподвижно закрепляют на объекте, в процессе движения объекта для каждого модуля находят по их выходным сигналам параметры ориентации, затем, используя уравнение ошибок и фильтра Калмана, корректируют параметры ориентации второго модуля, после чего, на основе интегрированных показаний акселерометров, находят углы ориентации объекта курса, тангажа и крена. Применение данного способа снижает требования к точности измерений углов поворота при вращении первых двух модулей, что повышает точность ориентации объекта.
Недостатком прототипа являются погрешности ориентации объекта, вызванные уменьшенной, но существующей погрешностью в определении угла поворота модулей, а также влиянием угловой скорости вращающегося модуля на результат вычисления параметров ориентации объекта.
Известен способ измерения параметров угловой скорости и ускорения микромеханическими модулями [3], взятый за прототип. Согласно данному способу на борту подвижного объекта устанавливают четыре одинаковых микромеханических модуля, каждый из которых имеет три оси чувствительности по угловой скорости и ускорению, лежащие вдоль осей ортогональной системы координат объекта, причем первый модуль поворачивают вокруг оси г, второй модуль поворачивают вокруг оси у, третий модуль поворачивают вокруг оси х, при этом поворот вокруг осей происходит в диапазоне от 0° до 270° и назад от 270° до 0° с четырьмя остановками через 90°, на которых фиксируют измеряемые величины, при этом получают проекции величин на ортогональные оси, при вращении вокруг оси z
Затем полученными значениями величин от трех подвижных модулей корректируют во время остановок выходные значения величин четвертого модуля, закрепленного неподвижно на корпусе объекта, при этом получают коррекцию дрейфа нуля выходных сигналов четвертого модуля, работающего в режиме непрерывного реального времени, чем обеспечивают непрерывную ориентацию и навигацию по проекциям на три ортогональные оси объекта величин его угловой скорости и ускорения.
В обозначениях величины, например, Wxz, первый индекс (х) обозначает, на какую ось имеет место проекция величины, а второй индекс обозначает, вокруг какой оси вращается модуль. При трех индексах в середине имеет место цифра, которая означает угол поворота модуля: 1 - 0°, 2 - 90°, 3 - 180°, 4 - 270°.
Применение данного способа позволяет практически исключить систематическую погрешность измерения и снизить почти в три раза случайную погрешность.
Повороты модулей от 0° до 270° и назад от 270° до 0° позволяют применять для передачи и съема информации с вращающихся модулей гибкие металлические ленты, исключая скользящие контакты. Однако стечением времени эти ленты из-за многочисленных изгибов на ±180° могут сломаться, создавая отказ всего объекта.
Заявляемое решение решает задачу бесконтактного съема и передачи данных на вращающийся модуль
Техническим результатом заявленного изобретения является повышение надежности определения навигационных параметров и параметров ориентации подвижных объектов.
Для решения поставленной задачи в способ измерения параметров угловой скорости и ускорения микромеханическими гироскопами и акселерометрами, согласно которому на борту подвижного объекта устанавливают четыре модуля, причем каждый модуль имеет три ортогональные оси чувствительности х0, у0, z0 по ускорению и угловой скорости, при этом первые три модуля вращают вокруг оси z0, которую у модулей ориентируют вдоль ортогональных осей объекта, соответственно х, у, z, четвертый модуль устанавливают неподвижно на объекте, причем оси модуля совпадают с осями объекта, кроме того вращение подвижных модулей производят с остановками на углах 0°, 90°, 180°, 270° во время которых определяют проекции измеряемых величин на ортогональные оси объекта
Wx=(Wx1z+Wy2z-Wx3z-Wy4z+Wx1y+Wz2y-Wx3y-Wz4y)/8
Wy=(Wy1z-Wx2z-Wy3z+Wx4z+Wy1x+Wz2x-Wy3x-Wz4x)/8
Wz=(Wzly-Wx2y-Wz3y+Wx4y+Wz1x-Wy2x-Wz3x+Wy4x)/8
где первый индекс означает, на какую ось имеет место проекция величины, второй индекс означает угол поворота модуля: 1 - 0°, 2 - 90°, 3 - 180°, 4 - 270°, третий индекс обозначает, вокруг какой оси вращается модуль, затем полученными значениями величин от трех подвижных модулей корректируют во время остановок выходные значения величины четвертого модуля. Введены действия, согласно которым на внешней поверхности модулей устанавливают в точках пересечения с осями х0 и у0 четыре фотодатчика, а напротив каждого из трех подвижных модулей вдоль, соответственно, осей X, Y, Z неподвижно устанавливают один источник света, при этом вращают модули в одну сторону и при нахождении одного из фотодатчиков напротив источника света производят остановку вращения модуля, причет длительность остановок вращения модулей регулируют так, чтобы все три модуля останавливались синхронно и синфазно на одних углах, кроме того, передачу управляющих сигналов на каждый подвижный модуль производят через оптопару, которую располагают на оси вращения с одной стороны модуля, при этом фотодатчик закрепляют на модуле, а измерительную информацию подвижного модуля передают через другую оптопару, которую располагают с другой стороны модуля на оси вращения, при этом источник света закрепляют на модуле.
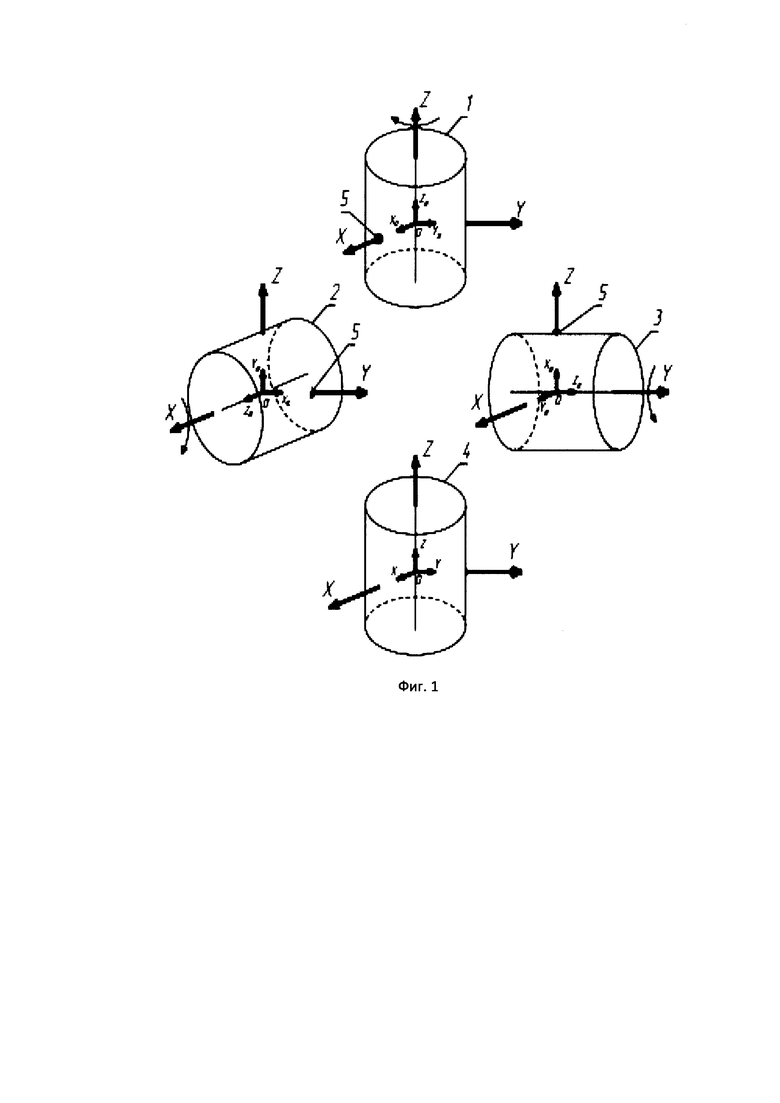
Сущность предполагаемого изобретения изменяется на Фиг. 1, на которой показано взаимное расположение модулей на объекте.
Как показано на Фиг. 1, модули 1, 2, 3 являются подвижными, модуль 4 неподвижно закреплен на объекте, оси координат х, у, z являются осями объекта, оси х0, у0, z0 являются внутренними осями вращающихся модулей. Точка 5 показывает место установки источника света рядом с подвижными модулями на объекте. Стрелкой показано направление вращения модулей вокруг собственной оси z0. Четыре фотодатчика на подвижном модуле расположены в точках пересечения осей х0, у0 с поверхностью модуля.
В начальный момент времени вращают модули до момента установки фотодатчика оси хо напротив источника света. При этом срабатывает фотодатчик, останавливая вращение модуля. После остановки вращения всех трех модулей определяют проекции измеренных величин на оси объекта Wx1z, Wx1y, Wy1z, Wy1x, Wz1y, Wz1x, затем сразу одновременно начинают вращение модулей. При последующих остановках на углах 90°, 180°, 270° от начального угла каждый раз определяют очередные проекции измеряемых величин на оси объекта и одновременно запускают вращение модулей. Одновременный запуск вращения обеспечивает синхронное и синфазное вращение модулей.
После трех вращений модулей на 90° появляется вся информация для определения скорректированных проекций измеряемых величин на оси объекта.
Wx=(Wx1z+Wy2z-Wx3z-Wy4z+Wx1y+Wz2y-Wx3y-Wz4y)/8
Wy=(Wy1z-Wx2z-Wy3z+Wy4z+Wy1x+Wz2x-Wy3x-Wz4x)/8
Wz=(Wz1y-Wx2y-Wz3y+Wx4y+Wz1x-Wy2x-Wz3x+Wy4x)/8
Полученные величины перезаписывают в данные четвертого модуля, снижая систематическую и случайную погрешности его результатов измерения.
Затем после каждого поворота модулей на 90° результаты измерения величин Wx, Wy, Wz обновляются.
В каждом модуле проекции измеренных величин преобразуют в цифровой вид. При этом у вращающихся модулей перед каждым новым вращением информацию передают через оптрон на неподвижную часть объекта. Оптрон располагают на оси модуля, причем источник света оптрона располагают на модуле, модулируя силу света измеренной информацией, а фотодатчик неподвижно располагают на объекте, воспринимая импульсы света с подвижной части. Сигналы управления с объекта на вращающийся модуль передают через другой оптрон, расположенный с противоположной стороны модуля на оси вращения. При этом источник света оптрона устанавливают неподвижно на объекте, а фотодатчик располагают на модуле, в результате чего управление происходит через силу света со стороны объекта на вращающийся модуль.
В результате чего заявленный способ по сравнению с прототипом значительно увеличивает свою долговечность за счет отсутствия подвижных механических контактов, повышая надежность ориентации и навигации подвижных объектов.
С помощью предлагаемого способа возможно получить полноценную систему для ориентации и навигации подвижных объектов повышенной точности на основе микромеханических акселерометров и гироскопов.
Путем измерения угловой скорости при различных положениях гироскопических чувствительных элементов (установленных на подвижных субмодулях), а также за счет избыточной неортогональной системы датчиков. Можно достичь точности определения угловой скорости достаточной для нахождения ориентации вектора суточного вращения Земли относительно объекта. Что дает возможность определить азимут и широту (объекта). В том числе и на непрерывно движущемся объекте.
А по текущим показаниям акселерометров находят относительное положение вектора силы тяжести (относительно объекта) Что дает возможность определить текущие значения углов крена и тангажа (дифферента).
Зная угловую ориентацию, можно получить показания ускорений в неподвижном (связанном с Землей) базисе. Путем двойного интегрирования которых - можно получить относительные перемещения. Если были известны географические координаты в какой то момент времени (например в момент прекращения действия ГНСС), то возможно определение текущих значений координат (с постепенно накапливающейся погрешностью).
Список литературы
1. Zhang У, Zhou В, Song М, Hou В, Xing Н, Zhang R. A Novel MEMS Gyro North Finder Design Based on the Rotation Modulation Technique. Sensors (Basel). 2017Apr 28;17(5}:973. doi: 10.3390/s17050973. PMID: 28452936; PMCID: PMC5464685.
2. Ц. Лян, Ю.А. Литвиненко, O.A. Степанов «Метод обработки измерений от двух блоков микромеханических гироскопов при решении задачи ориентации». Гироскопия и навигация. Том 26. №2 (161), 2018 г.
3. Патент 2766833 от 24.05.2021 г. «Способ измерения параметров угловой скорости и ускорения микромеханическими гироскопами и акселерометрами». Авторы: Антонов А.А., Гермонина Н.Б. и другие.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения параметров угловой скорости и ускорения микромеханическими гироскопами и акселерометрами | 2021 |
|
RU2766833C1 |
| СПОСОБ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ НА МИКРОМЕХАНИЧЕСКИХ ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ | 2024 |
|
RU2830128C1 |
| СПОСОБ СЧИСЛЕНИЯ КООРДИНАТ ПРИ НЕОРТОГОНАЛЬНОЙ ОРИЕНТАЦИИ ВХОДНЫХ ОСЕЙ ИЗМЕРИТЕЛЕЙ ПАРАМЕТРОВ УГЛОВОГО ДВИЖЕНИЯ | 2020 |
|
RU2785971C2 |
| СПОСОБ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ НА МИКРОМЕХАНИЧЕСКИХ ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ | 2015 |
|
RU2577567C1 |
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2005 |
|
RU2295113C2 |
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2005 |
|
RU2300079C1 |
| Способ повышения точности калибровки блока микромеханических датчиков угловой скорости | 2019 |
|
RU2727344C1 |
| ГИРОГОРИЗОНТКОМПАС | 2015 |
|
RU2601240C1 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ | 2015 |
|
RU2633703C1 |
| ГИРОГОРИЗОНТКОМПАС С ВРАЩЕНИЕМ ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО БЛОКА | 2010 |
|
RU2436046C1 |
Изобретение относится к измерительной технике, а именно к способам измерения навигационных параметров подвижных объектов. Сущность изобретения заключается в том, что в способе измерения параметров угловой скорости и ускорения микромеханическими гироскопами и акселерометрами измерительную информацию трех вращающихся модулей с остановками через 90° используют для коррекции данных одного неподвижного модуля, причем остановки вращения модулей производят по сигналам оптических датчиков, при этом регулируют длительность остановок каждого модуля, чем обеспечивают синхронность и синфазность вращения трех модулей, а управляющие сигналы на вращающиеся модули и измерительную информацию этих модулей передают с помощью двух оптронов, расположенных с двух сторон модуля на оси вращения. Техническим результатом заявленного изобретения является повышение надежности определения навигационных параметров подвижных объектов. 1 ил.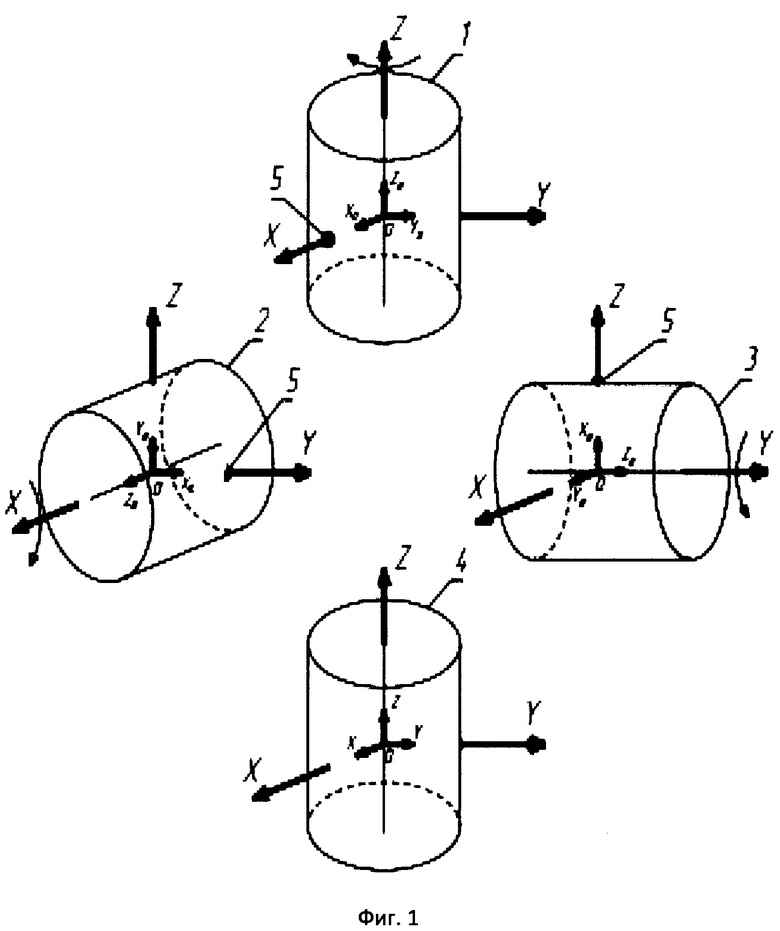
Способ измерения параметров угловой скорости и ускорения микромеханическими гироскопами и акселерометрами, согласно которому на борту подвижного объекта устанавливают четыре модуля, причем каждый модуль имеет три ортогональные оси чувствительности х0, у0, z0 по ускорению и угловой скорости, при этом первые три модуля вращают вокруг оси z0, которую у модулей ориентируют вдоль ортогональных осей объекта соответственно х, у, z, четвертый модуль устанавливают неподвижно на объекте, причем оси модуля совпадают с осями объекта, кроме того, вращение подвижных модулей производят с остановками на углах 0°, 90°, 180°, 270°, во время которых определяют проекции измеряемых величин на ортогональные оси объекта
Wx=(Wx1z+Wy2z+Wx3z+Wy4z+Wx1y+Wz2y-Wx3y-Wz4y)/8
Wy=(Wy1z-Wx2z-Wy3z+Wx4z+Wy1z+Wz2x-Wy3z-Wz4x)/8
Wz=(Wz1y-Wx2y-Wz3y+Wx4y+Wz1x-Wy2x-Wz3x+Wy4x)/8,
где первый индекс означает, на какую ось имеет место проекция величины, второй индекс означает угол поворота модуля 1 - 0°, 2 - 90°, 3 - 180°, 4 - 270°, третий индекс обозначает, вокруг какой оси вращается модуль, затем полученными значениями величин от трех подвижных модулей корректируют во время остановок выходные значения величины четвертого модуля, чем обеспечивают коррекцию дрейфа нуля его выходных сигналов, отличающийся тем, что на внешней поверхности модулей устанавливают в точках пересечения с его осями х0 и у0 четыре датчика, а напротив каждого из трех подвижных модулей вдоль соответственно осей х, у, z неподвижно устанавливают один источник света, при этом вращают модули в одну сторону и при нахождении одного из фотодатчиков напротив источника света производят остановку вращения модуля, причем длительность остановок вращения модулей регулируют так, чтобы все три модуля останавливались синхронно и синфазно на одних углах, кроме того, передачу управляющих сигналов на каждый подвижный модуль производят через оптопару, которую располагают на оси вращения с одной стороны модуля, при этом фотодатчик закрепляют на модуле, а измерительную информацию подвижного модуля передают через другую оптопару, которую располагают с другой стороны модуля на оси вращения, при этом источник света закрепляют на модуле.
| Способ измерения параметров угловой скорости и ускорения микромеханическими гироскопами и акселерометрами | 2021 |
|
RU2766833C1 |
| Способ повышения точности калибровки масштабных коэффициентов и углов неортогональности осей чувствительности блока датчиков ДУС | 2019 |
|
RU2718142C1 |
| СПОСОБ И УСТРОЙСТВО КАЛИБРОВКИ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ МОДУЛЕЙ | 2017 |
|
RU2669263C1 |
| US 8718963 B2, 06.05.2014. | |||

