Изобретение относится к области лазерной техники (радиационной безопасности) и может быть использовано для дезактивации поверхностей сложной формы малоразмерного оборудования и осколков (далее - объектов), образовавшихся в результате аварии ядерно- и радиационного опасного объекта.
Дезактивация таких объектов является длительным и трудоемким процессом, связанным с образованием большого количества радиоактивных отходов (РАО), создающих непосредственную опасность для здоровья персонала аварийно-спасательных формирований (АСФ) и работников предприятий промышленности. В большинстве случаев использование жидкостного способа дезактивации поверхностей сложной формы не подходит, так как создает большой объем РАО по сравнению с безжидкостным способом.
Известен способ дезактивации лазером загрязненной радионуклидами поверхности [1], в котором удаление радиоактивной пленки с поверхностей объекта, включает формирование пучка лазерного излучения и последующее сканирование сформированным пучком по загрязненной поверхности объекта через слой вещества, удаляющего радиоактивную пленку, в качестве которого используют прозрачный для лазерного излучения пленочный материал, выполненный из твердого вещества, который перед сканированием размещают между источником лазерного излучения и загрязненной поверхностью объекта, затем производят сканирование по всей загрязненной поверхности объекта лазерным пучком, а после окончания сканирования пленочный материал удаляют.
Недостатками такого способа является работа с загрязненной радионуклидами пленкой персоналом АСФ; температурные и временные ограничения, необходимые при приготовлении полимерного состава, что ограничивает его применение в широком диапазоне температур; трудоемкость удаления пленки с поверхности сложной формы.
Наиболее близким по технической сущности является способ [2] лазерной дезактивация поверхности профилированных деталей, принцип работы которого основан на лазерной дезактивации поверхности профилированной детали, характеризующийся тем, что последовательно воздействуют на части поверхности профилированной детали импульсными лазерными пучками с длиной волны в ультрафиолетовой области, позволяющими удалять поверхностный слой профилированной детали в виде частиц, при этом лазерные пучки распределены таким образом, что позволяют одновременно облучать контур обрабатываемой части профилированной детали. Извлекают упомянутые частицы посредством отсасывания.
Недостатком применения подобного способа является невозможность дезактивации объектов с поверхностями сложной формы.
Задачей предлагаемого изобретения является разработка устройства дезактивации объектов с поверхностями сложной формы с малым объемом РАО.
Требуемый технический результат достигается тем, что в устройстве используется камера с герметизированной дверцей, оборудованная приточно-вытяжной вентиляцией с вытяжным вентилятором в вытяжном канале у которого на входе установлен сменный фильтр. Внутри камеры в нижней ее части установлена поворотная платформа на которую помещают объект. К тыльной стенке камеры прикреплен манипулятор, позволяющий развернуть помещенный объект в вертикальной плоскости. На внутренних боковых поверхностях камеры размещена система зеркал, состоящая из подвижных и неподвижных зеркал, позволявшая направлять лазерное излучение к поверхности объекта. Под поворотной платформой размещен лазер работающий как в режиме сканирования совместно с фотоприемником для построения 3-х мерной карты поверхности объекта сложной формы, так и в режиме дезактивации с системой регулирования фокусного расстояния. Управление всеми системами осуществляется соответствующим блоком установленном на камере.
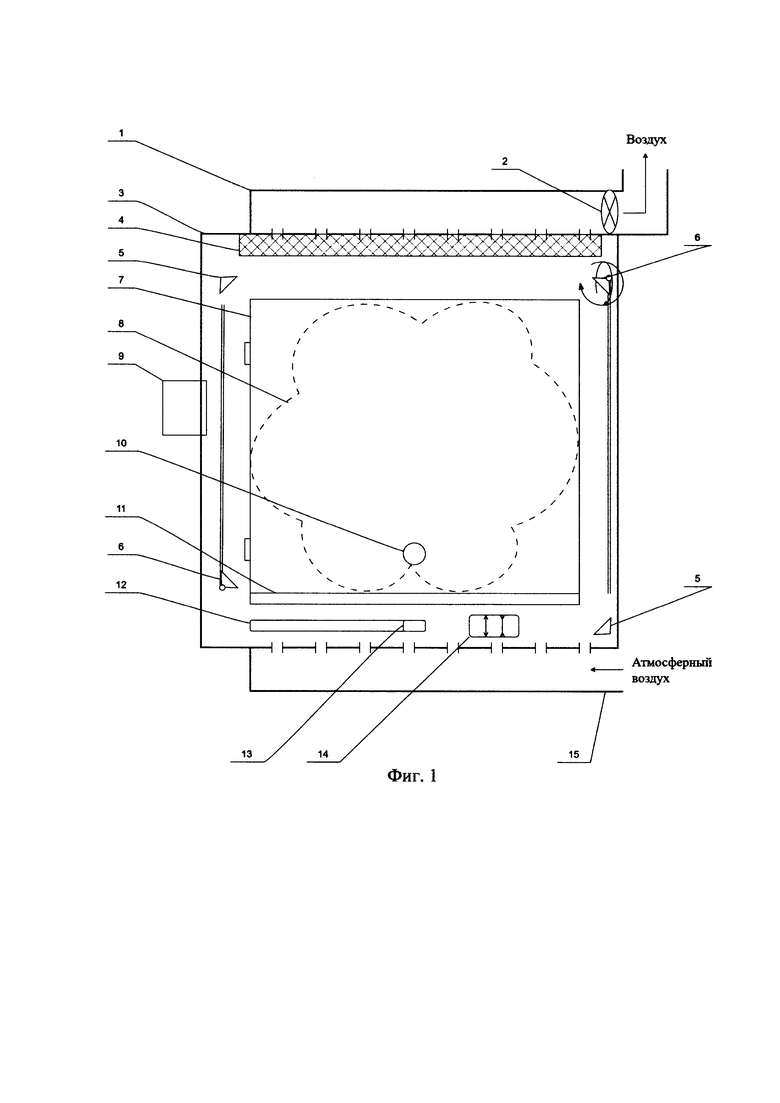
Сущность предлагаемого изобретения поясняется чертежом, где на фиг.1 представлен возможный вариант устройства лазерной дезактивации объектов с поверхностями сложной формы, который содержит:
1 - вытяжной канал приточно-вытяжной вентиляции;
2 - вытяжной вентилятор
3 - камера обработки;
4 - сменный фильтр;
5 - неподвижное зеркало;
6 - подвижное зеркало;
7 - герметизируемая дверца камеры обработки;
8 - загрязненный объект;
9 - блок управления;
10 - манипулятор;
11 - поворотная платформа;
12 - лазер;
13 - фотоприемник;
14 - система регулирования фокусного расстояния;
15 - приточный канал приточно-вытяжной вентиляции. Устройство лазерной дезактивации объектов с поверхностями сложной формы работает следующим образом: загрязненный объект (8) помещают в камеру обработки (3) на поворотную платформу (11) расположенную внутри камеры. После чего, закрывают герметизируемую дверцу камеры (7). Далее блок управления (9) включает вытяжной вентилятор (2) находящийся в вытяжном канале приточно-вытяжной вентиляции (1), в следствии чего через приточный канал (15) в камеру обработки (3) поступает атмосферный воздух, которым осуществляется обдув объекта равномерным потоком. Частицы, увлекаемые потоком воздуха задерживаются сменным фильтром (4) установленным на входе в вытяжной канал. Далее блок управления (9) включает лазер (12) в режиме сканирования для построения в своей памяти 3-х мерной карты поверхности сложной формы объекта (8). В режиме сканирования лазер (12) работает на минимальной мощности в частотном режиме с фиксацией блоком управления (9) времени излучения каждого импульса. Лазерное излучение поступает в систему зеркал состоящую из линейно перемещаемых по вертикали зеркал (6) вдоль внутренних боковых поверхностей камеры и неподвижных зеркал (5). Зеркала (6) системы зеркал по командам блока управления (9) могут менять свое угловое положение в вертикальной и горизонтальной плоскости. В месте с этим блок управления (9) с помощью системы зеркал направляет лазерное излучение для сканирования поверхности объекта. Система зеркал выполнена таким образом, что за счет линейного перемещения и изменения угла между осью лазерного излучения и поверхностью зеркал по командам от блока управления (9) обеспечивается последовательный построчный доступ сканирующего лазерного излучения ко всей доступной поверхности объекта (8). После каждого цикла сканирования по фронтальной и тыльной поверхности объекта (8) поворотная платформа (11) разворачивает объект (8) на угол пропорциональный углу поворота зеркала в горизонтальной плоскости. Обеспечивая тем самым исключение теневых зон для сканирующего лазера вызванных неровностями объекта.
После разворота платформой (11) объекта на 360 градусов, манипулятором (10) производится разворот объекта в вертикальной плоскости на угол 90 градусов. Цикл сканирования повторяется.
Устройство манипулятора (10) позволяет производить работы с объектами различной высоты и формы в пределах рабочей области.
Отраженное лазерное излучение от объекта (8) через систему зеркал фиксируется фотоприемником (13). По информации о положении зеркал, углу поворота платформы (11) и времени задержки отраженного лазерного излучения формируется 3-х мерная карта поверхности загрязненного объекта (8).
После построения 3-х мерной карты блок управления (9) включает лазер (12) в режиме дезактивации. В режиме дезактивации лазер работает с максимальной мощностью. Лазерное излучение с помощью системы зеркал, поворотной платформы (11) и манипулятора (10), а также системой регулирования фокусного расстояния (14), по командам от блока управления (9) в соответствии с 3-х мерной картой поверхности, фокусируется на поверхности объекта (8). В зоне фокусировки лазерного излучения на поверхности объекта происходит сублимация поверхностного слоя. В результате образовавшийся газ системой приточно-вытяжной вентиляции (1) пропускается через сменный фильтр (3) в котором собираются продукты сублимации. Собранные в фильтре (3) продукты сублимации представляют собой малообъемный РАО. После проведения цикла дезактивации, в соответствии с 3-х мерной картой поверхности объекта, блок управления (9) останавливает работу всех систем. Далее дезактивированный объект извлекается. После чего при необходимости извлекается сменный фильтр и утилизируется.
Таким образом, устройство позволяет проводить дезактивацию объектов с поверхностями сложной формы с образованием малого объема РАО.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. RU №2319238, 2008 г.
2. RU №2411044, 2011 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО СТАБИЛИЗАЦИИ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ УКАЗАТЕЛЬНЫХ ОГНЕЙ СИСТЕМЫ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2007 |
|
RU2350517C1 |
| СПОСОБ ТЕСТИРОВАНИЯ ЧИПОВ КАСКАДНЫХ ФОТОПРЕОБРАЗОВАТЕЛЕЙ НА ОСНОВЕ СОЕДИНЕНИЙ Al-Ga-In-As-P И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2384838C1 |
| УСТАНОВКА ДЛЯ ТЕСТИРОВАНИЯ ЧИПОВ КАСКАДНЫХ ФОТОПРЕОБРАЗОВАТЕЛЕЙ НА ОСНОВЕ СОЕДИНЕНИЙ Al-Ga-In-As-P | 2009 |
|
RU2391648C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2005 |
|
RU2292566C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ЛАЗЕРНЫЙ МОДУЛЬ МЛМ (КОМПЛЕКС) | 2021 |
|
RU2769194C1 |
| СИСТЕМА ИМПУЛЬСНОЙ ЛАЗЕРНОЙ ЛОКАЦИИ | 2019 |
|
RU2717362C1 |
| Линейный оптический гироскоп | 2024 |
|
RU2827881C1 |
| Система импульсной лазерной локации | 2015 |
|
RU2612874C1 |
| Устройство для селективного лазерного спекания | 2019 |
|
RU2745247C1 |
| Система импульсной лазерной локации | 2017 |
|
RU2660390C1 |
Устройство может быть использовано для дезактивации объектов с поверхностями сложной формы, образовавшихся в результате аварии ядерно- и радиационного опасного объекта. Устройство состоит из камеры обработки с герметизируемой дверцей, приточно-вытяжной вентиляции с вытяжным вентилятором и сменным фильтром на входе в вытяжной канал, лазера с фотоприемником и системой регулирования фокусного расстояния. В камере обработки расположена система зеркал. В камере установлен манипулятор и поворотная платформа, перемещающие объект в зону действия лазерного излучения. Изобретение позволяет проводить дезактивацию объектов с поверхностями сложной формы с образованием малого объема РАО. 1 ил.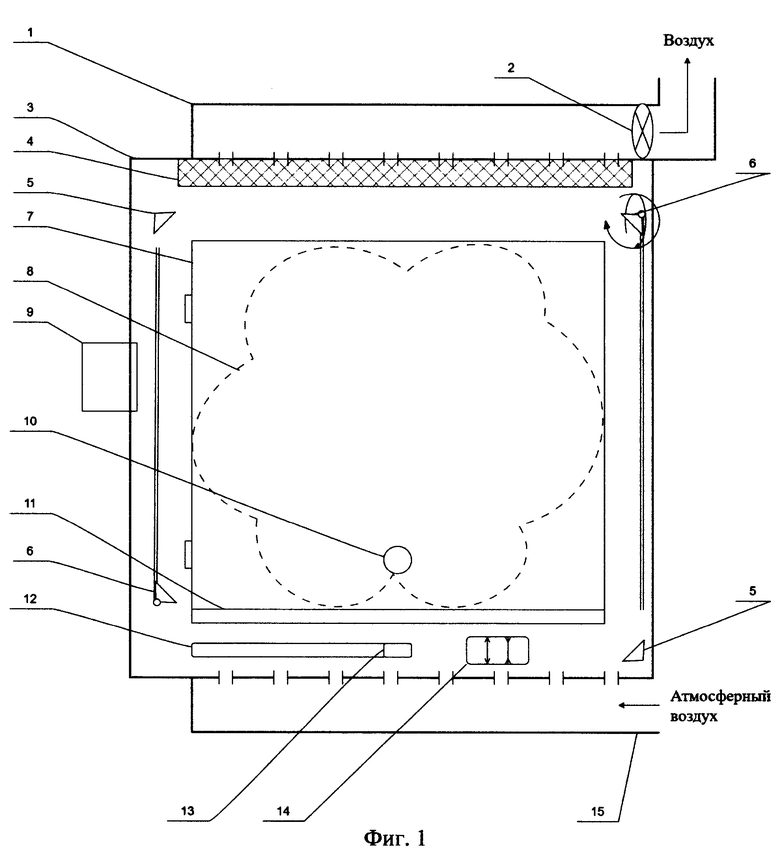
Устройство лазерной дезактивации объектов с поверхностями сложной формы, состоящее из камеры обработки и лазера, отличающееся тем, что камера обработки оборудована герметизированной дверцей, приточно-вытяжной вентиляцией с вытяжным вентилятором, сменным фильтром, поворотной платформой, манипулятором, системой зеркал, фотоприемником, системой регулирования фокусного расстояния, блоком управления расположенным на камере обработки, при этом фильтр установлен на входе в вытяжной канал, манипулятор и система зеркал расположены внутри камеры на стенках, поворотная платформа внутри камеры в нижней ее части, а лазер, фотоприемник и система регулирования фокусного расстояния внутри камеры под поворотной платформой.
| ЛАЗЕРНАЯ ДЕЗАКТИВАЦИЯ ПОВЕРХНОСТИ ПРОФИЛИРОВАННЫХ ДЕТАЛЕЙ | 2005 |
|
RU2411044C2 |
| ЛАЗЕРНАЯ ЛОКАЦИОННАЯ СИСТЕМА | 2023 |
|
RU2809468C1 |
| ЛАЗЕРНЫЙ ТЕХНОЛОГИЧЕСКИЙ КОМПЛЕКС ДЛЯ ОБРАБОТКИ КРУПНОГАБАРИТНЫХ ОБЪЕКТОВ | 2009 |
|
RU2397055C1 |
| WO 2022210995 A1, 06.10.2022 | |||
| СПОСОБ СВЯЗИ В СИСТЕМЕ D2D, ТЕРМИНАЛ И СЕТЕВОЕ УСТРОЙСТВО | 2019 |
|
RU2774801C1 |

