Изобретение относится к технике управления дорожно-транспортным движением и касается определения местоположения транспортных средств на дорожном полотне с двусторонним однополосным движением.
В настоящее время проблема определения местоположения и контроля выполнения ПДД водителями транспортных средств на дорожном полотне неразрывно связана с установкой дорогостоящего оборудования на протяжении подконтрольного участка дороги. Устанавливаемое оборудование, к которому относятся многопотоковые видеокамеры с большой буферной памятью, лазерные радары и многое другое, не позволяет оценивать и выдавать результат в максимально полном объеме, так как указанные средства не в состоянии одновременно определять местоположение нескольких транспортных средств на дорожном полотне, включая их скорость. Однако не на всех особо опасных участках дорог является уместной и экономически предпочтительной установка таких сложных систем. На трассах административного уровня (регионального и межмуниципального значения) особо опасных участков дорог немало, а водителям транспортных средств производить полную оценку дорожной ситуации мешает совокупность следующих факторов: высокие скорости потоков, большие габаритные размеры транспортных средств, рельефные особенности трассы, препятствующие получению необходимой информации.
Для качественной оценки дорожной ситуации перед автомобилем широкое распространение получили автоматизированные средства, функционирование которых заключается в предупреждении водителя, а также корректировании движения автомобиля в случаях изменения динамики движения впереди идущего транспортного средства. Такие средства обычно основаны на использовании лазерных радаров, с помощью которых определяется расстояние до движущегося впереди транспортного средства и его скорость, а также на сопоставлении последней со скоростью преследующего транспортного средства (DE 102005008715 A1, G01S 13/93, 31.08.2006; US 2007/0146684 A1, G01C 3/08, 28.06.2007).
Известные устройства данного назначения имеют ограниченную область практического применения, охватывающую лишь контроль фронтально расположенного или движущегося препятствия.
Аналоги предлагаемого изобретения направлены на повышение общей безопасности дорожного движения, однако имеют принципиально иной алгоритм функционирования. Данные средства позволяют определить расстояние до встречного потока и его скорость при помощи видеокамер, датчиков, использующих лазерные лучи, радаров и доводят полученную информацию до водителя.
Наиболее близким по технической сущности к предполагаемому изобретению является «Способ предупреждения столкновения транспортного средства с объектом, перемещающимся в переднебоковой зоне транспортного средства в направлении, пересекающем направления движения транспортного средства». Вышеуказанный способ направлен на обеспечение эффективного контроля за перемещением объектов в переднебоковой зоне, если направление этого перемещения пересекает траекторию движения транспортного средства. Достигаемый при этом технический результат заключается в повышении безопасности движения за счет обеспечения превентивного оповещения водителя о возникающем в переднебоковой зоне движущемся препятствии и соответствующего управления параметрами движения транспортным средством (МПК: B60W30/08; №2402445 – прототип).
Недостатком рассмотренного выше способа является то, что он не в полной мере позволяют решить задачу предлагаемого изобретения, заключающуюся в автоматизированном определении местоположения всех транспортных средств, въезжающих в зону, контролируемую совокупностью логически функционирующих и расположенных определенным геометрическим образом устройств. Данный способ реализуются путем привязки к транспортному средству, требуя установки на нем необходимых технических средств. Отличительной особенностью предлагаемого изобретения является выполнение вышеуказанных функций автономно от транспортного средства.
Предлагаемый способ реализует функцию определения местоположения и контроля всех транспортных средств, въезжающих на рассматриваемый участок дорожного движения.
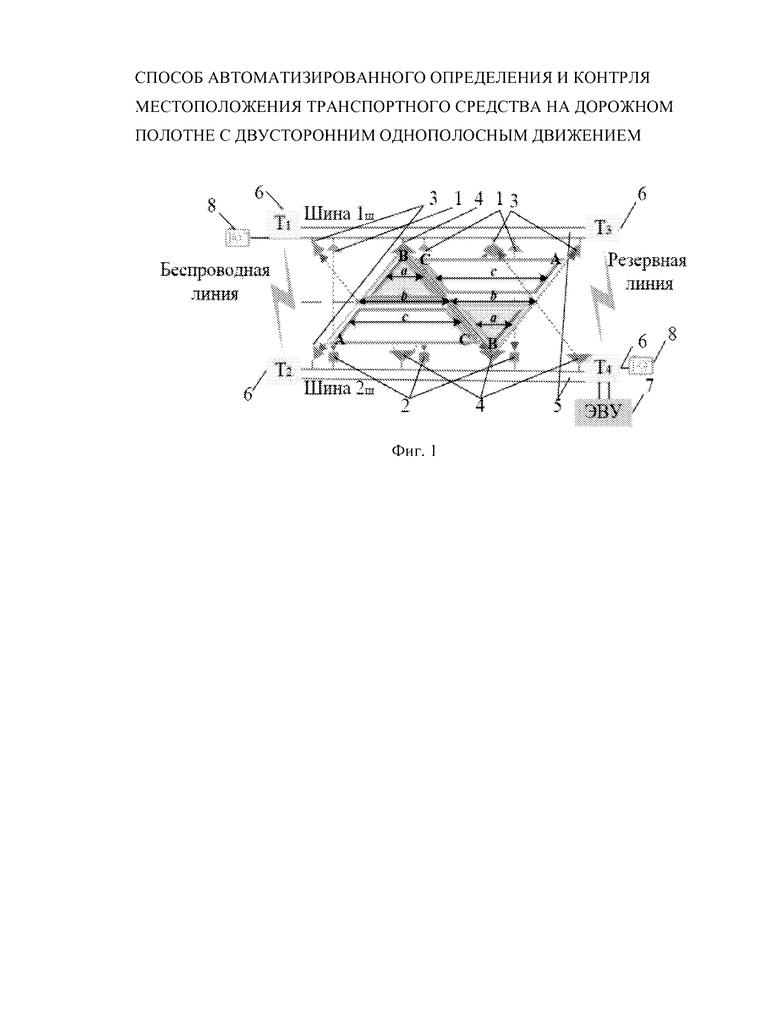
На фиг. 1 изображена реализация способа автоматизированного определения местоположения и контроля транспортных средств на дорожном полотне с двусторонним однополосным движением.
На фиг. 1:
1 – датчик генерирования инфракрасного излучения, луч света которого направлен перпендикулярно направлению дорожного движения (тип 1),
2 – датчик приема и инфракрасного излучения от датчика 1 (тип 2),
3 – датчик генерирования инфракрасного излучения, луч света которого направлен под определенным углом к направлению дорожного движения (тип 3),
4 – датчик приема и инфракрасного излучения от датчика 3 (тип 4),
5 – шина 1ш и шина 2ш – шины передачи данных,
6 – Т1, Т2, Т3, Т4 – беспроводные устройства, за счет которых организуется беспроводная и резервная линия, позволяющая осуществлять обмен данными между шинами,
7 – ЭВУ – электронно-вычислительное устройство, представляет собой аппаратно-программный контроллер, позволяющий принимать и обрабатывать данные с датчиков всех типов, в соответствии с определенным программным алгоритмом, на основе которого происходит оценка транспортных средств, въезжающих на контролируемый участок дорожного движения, и принятие определенного ряда решений по результатам дорожной ситуации, сложившейся в моменты времени, максимально приближенные к реальным,
8 – камера, фиксирующая регистрационные номера транспортных средств.
На обочинах дороги, перпендикулярно направлению движения, устанавливаются два типа датчиков: устройство генерирования 1 (тип 1) и приема 2 (тип 2) инфракрасного излучения, для обнаружения транспортного средства на дорожном полотне, а также его скорости.
Определение местоположения транспортного средства по отношению к общей ширине дорожного полотна достигается путем установки датчиков типа 3, 4 по обеим сторонам дороги, на основе их особенного геометрического расположения. Датчики типа 3, 4, геометрически расположены так, что два соседних датчика 3 (тип 3) являются основанием мнимого равнобедренного треугольника АВС, а датчик 4 (тип 4) его вершиной.
Реализация способа заключается в работе совокупности перечисленных элементов, позволяющих решить следующее:
- определить скорости транспортных средств, въезжающих в зону опасного участка дорожного движения, с разрешенным обгоном;
- отслеживать транспортные средства на всем анализируемом отрезке пути посредством присвоения идентификационных номеров каждому транспортному средству, въезжающему на опасный участок дороги;
- определять местоположение транспортного средства на дорожном полотне.
Способ автоматизированного определения местоположения транспортных средств на дорожном полотне с двусторонним однополосным движением заключается в выполнении следующей последовательности действий.
Определяются скорости транспортных средств. На обочинах дороги, перпендикулярно направлению движения, устанавливаются два типа датчиков: устройство генерирования 1 (тип 1) и приема 2 (тип 2) инфракрасного излучения, позволяющие получать сведения о моменте времени прерывания луча. Для определения скорости движения транспортного средства достаточно двух пар таких устройств, установленных на определенном, заранее известном, расстоянии друг от друга. На основании последовательного прерывания двух лучей данные о моментах пересечения отправляется по шинам передачи данных (шина 1ш и шина 2ш, 5) на электронно-вычислительное устройство (ЭВУ) 7, в котором определяется интервал времени между прерываниями, что в совокупности с известным расстоянием между парами датчиков 1,2 (тип 1, 2) позволяет рассчитать скорость движения транспортного средства и определить его направление движения.
Определение местоположения транспортного средства по отношению к общей ширине дорожного полотна достигается путем установки датчиков (1, 2, 3, 4) по обеим сторонам дороги и их особенным геометрическим расположением. Совокупность технических устройств, перечисленных выше, позволяет реализовать предлагаемое изобретение следующим образом.
Датчик 3 (тип 3) представляет собой устройство генерирования инфракрасного излучения, датчик 4 (тип 4) представляет собой устройство приема инфракрасного излучения.
Между лучами датчиков 3, 4 (тип 3,4), геометрически расположенных так, что пара датчиков 3 (тип 3) является основанием мнимого равнобедренного треугольника, а датчик 4 (тип 4) - его вершиной, закладываются три заранее известных расстояния:
b – бифуркационное расстояние между сторонами мнимого равнобедренного треугольника, где эти стороны пересекает линия разметки;
c – расстояние между сторонами мнимого равнобедренного треугольника, которое транспортное средство проезжает, двигаясь по своей полосе движения;
a – расстояние между сторонами мнимого равнобедренного треугольника, которое транспортное средство проезжает по встречной полосе движения.
На основании значения величины бифуркационного расстояния b и двух других величин расстояния, которое транспортное средство проезжает по своей полосе движения с, и расстояния, которое транспортное средство проезжает по встречной полосе движения а, заложенных в ЭВУ 7, происходит анализ местоположения транспортного средства в ЭВУ 7 относительно местонахождения его на дорожном полотне.
Пока транспортное средство проходит большее расстояние между лучами мнимого равнобедренного треугольника, образованного двумя датчиками 3 (тип 3) (основание треугольника) и датчиком 4 (тип 4) (вершина треугольника), чем бифуркационное, в ЭВУ 7 принимается решение о том, что транспортное средство находится в своей полосе движения. При условии, когда расстояние, которое проходит транспортное средство, становится меньше, чем бифуркационное расстояние b, в ЭВУ 7 принимается решение о том, что транспортное средство находится на встречной полосе движения.
В результате чего идентификационный номер тарнспортного средства будет передан на камеру 8, и при проезде транспортным средством зоны, контролируемой камерой 8, государственный регистрационный номер транспортного средства, выехавшего на полосу встречного движения, будет зафиксирован.
При условии остановки транспортного средства, информация о его местоположении заносится в буфер ЭВУ 7 и сохраняется там до момента возобновления движения транспортным средством, после чего его местоположение будет обновляться. Когда транспортное средство покидает контролируемый участок дорожного движения, его номер удаляется из ЭВУ.
Изобретение относится к технике управления дорожно-транспортным движением и касается определения местоположения транспортных средств на дорожном полотне с двусторонним однополосным движением. Для определения местоположения всех транспортных средств, въезжающих в зону контролируемого участка дорожного движения, с помощью системы датчиков четырех типов, связанных с электронно-вычислительным устройством (ЭВУ). В ЭВУ закладывается три вида расстояния, при расчете которых в ЭВУ принимается решение, на какой именно полосе движения находится ТС: на своей или на встречной. Техническим результатом является улучшение автоматизированного определения местоположения ТС на дорожном полотне с двусторонним однополосным движением. 1 з.п. ф-лы, 1 ил.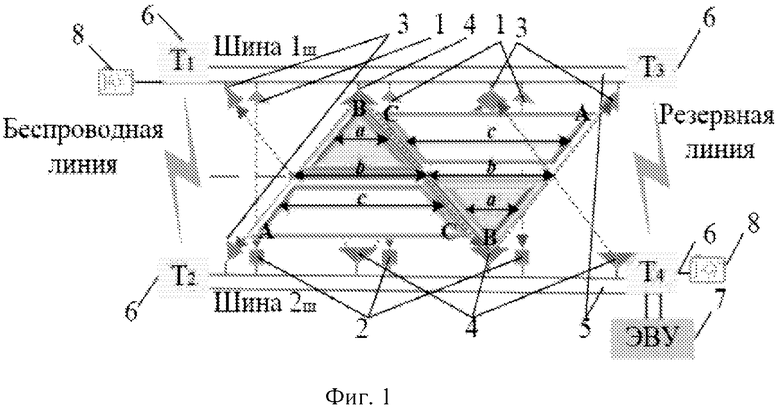
1. Способ автоматизированного определения местоположения и контроля транспортных средств на дорожном полотне с двусторонним однополосным движением заключается в том, что по краям дороги перпендикулярно направлению движения транспортного средства располагают не менее двух пар датчиков генерирования инфракрасного излучения ИК (тип 1) и не менее двух пар датчиков приема ИК излучения (тип 2), причем датчики (тип 1) генерирования и приема (тип 2) ИК излучения расположены строго напротив друг друга, также по краям дороги под определенным углом к направлению дорожного движения располагают не менее двух пар датчиков приема инфракрасного излучения (тип 3) и не менее одного датчика генерирования инфракрасного излучения (тип 4), установленных таким образом, что два датчика приема инфракрасного излучения (тип 3) образуют основание мнимого равнобедренного треугольника ABC, а один датчик генерирования инфракрасного (тип 4) - его вершину B, с каждого края контролируемого участка дороги устанавливают не менее двух камер, фиксирующих регистрационные номера транспортных средств, и одно ЭВУ, в котором обрабатываются данные, поступающие с датчиков всех типов, и принимаются решения по результатам дорожной ситуации, сложившейся в моменты времени, максимально приближенные к реальным; при въезде транспортного средства на контролируемый участок дороги сведения с датчиков инфракрасного излучения по шинам 1ш и 2ш поступают в электронно-вычислительное устройство, где происходит присвоение идентификационного номера транспортному средству, рассчитывается его скорость после прохождения пары датчиков генерирования и приема инфракрасного излучения, анализируется его местонахождение по отношению к дорожному полотну, следующим образом, в ЭВУ закладывается три вида расстояния между сторонами мнимого равнобедренного треугольника: расстояние, которое транспортное средство проезжает, двигаясь по своей полосе движения, с; которое автомобиль проезжает по встречной полосе, а; бифуркационное расстояние b, такое расстояние, где стороны мнимого равнобедренного треугольника пересекает линия разметки; при этом, если транспортное средство проезжает расстояние, большее, чем бифуркационное b, в ЭВУ принимается решение о том, что транспортное средство находится на своей полосе движения, если транспортное средство проезжает расстояние, меньшее, чем бифуркационное, системой принимается решение, что транспортное средство находится на встречной полосе движения, идентификационный номер транспортного средства передается на камеру, которая при проезде транспортным средством контролируемой зоны зафиксирует государственный регистрационный номер транспортного средства, при условии остановки транспортного средства его местоположение заносится в память ЭВУ и находится там до момента, пока транспортное средство не возобновит свое движение и не покинет контролируемый участок дороги, после чего номер, присвоенный транспортному средству, удаляется из памяти ЭВУ.
2. Способ автоматизированного оповещения водителей транспортных средств на особо опасных участках дороги по п. 1, отличающийся тем, что количество пар датчиков генерирования зависит от длины контролируемого участка, способ предполагает работу системы без установки на транспортное средство дополнительных устройств.