Изобретение относится к области машиностроения и может быть использовано в роторных механизмах на электромагнитных опорах. Областью применения являются нагнетатели, компрессоры, турбодетандеры газоперекачивающих агрегатов (ГПА).
В составе ГПА используются компрессоры с односторонним расположением линии всасывания, из-за чего при разности давлений со стороны всасывания и нагнетания возникает осевое усилие, действующее на ротор в направлении, противоположном движению потока газа при всасывании. Для уменьшения осевого усилия на валу ротора с напорной стороны устанавливают разгрузочный поршень. Разгрузочный поршень уравновешивает около 75% осевого усилия. Для уравновешивания остаточного усилия вал компрессора устанавливают в опорно-упорных подшипниках.
Конструктивно активный магнитный подвес ротора нагнетателя представляет собой комплект из двух радиальных и одного осевого электромагнитных подшипников. Со стороны привода ГПА радиальный электромагнитный подшипник является опорным подшипником, а совокупность радиального и осевого электромагнитных подшипников со стороны свободного конца компрессора составляют опорно-упорный подшипник.
В зависимости от индивидуальных особенностей компрессора величина неуравновешенной разгрузочным поршнем статической силы может достигать значения, сравнимого с номинальной нагрузочной способностью осевого магнитного подшипника или даже превосходить его.
Работа в таком режиме приводит к снижению возможностей активного магнитного подшипника компенсировать динамические нагрузки, снижает общую работоспособность системы, а также ведет к повышению энергопотребления и перегреву узлов магнитного подшипника.
Поэтому создание системы, способной эффективно компенсировать статическую силу, сохраняя при этом запас электромагнитной силы для компенсации динамических сил, становится актуальной проблемой.
Известна система управления электромагнитным подвесом ротора «СУМП-М2» производства АО «Корпорация ВНИИЭМ», которая состоит из пяти каналов, представляющих систему автоматического регулирования. Каждый канал состоит из субблока регулятора ПР, обеспечивающего заданный закон регулирования; субблока модулятора ПМ, преобразующего аналоговый выходной сигнал субблока ПР в широтно-модулированный импульсный сигнал; силового блока усилителя БУС-М, предназначенного для питания электромагнитов. Питание датчиков положения ротора, которые расположены на нагнетателе, осуществляется синусоидальным напряжением переменного тока частотой 100 кГц, формируемым в субблоке генератора ПГ.
Недостатками данной системы управления электромагнитным подвесом ротора являются: не соответствие установленным требованиям по надежности и бесперебойности работы, поскольку все элементы узлов управления системы выполнены на аналоговых микросхемах; в необходимости перепайки некоторых элементов узлов управления для настройки системы; сложность технического обслуживании; отсутствие возможности плавного изменения положения ротора в зависимости от статической нагрузки.
Известна система управления электромагнитным подвесом ротора «КТМ-1С», производства АО «Корпорация ВНИИЭМ», которая состоит из пяти независимых каналов управления токами в электромагнитах. Каждый канал системы содержит преобразователь сигналов датчиков положения ротора по своей координате в сигналы положения ротора Pri; регулятор и широтно-импульсный модулятор, который преобразует сигналы Pri в импульсные сигналы управления ключами выходных усилителей; выходные усилители преобразуют импульсные сигналы в токи электромагнитов; задающий генератор и три усилителя мощности, которые питают блоки двух радиальных и одного осевого датчиков положения ротора; компьютерную систему (СТС) для сбора и передачи телеметрической информации, а также для приема и передачи параметров регулирования по телефонной общедоступной сети.
Недостатками системы управления электромагнитным подвесом ротора «КТМ-1С» являются: сложность технического обслуживании; несоответствие требованиям безопасности и надежности работы; отсутствие автоматического режима измерения амплитудно-частотных характеристик каналов управления; отсутствие возможности плавного изменения положения ротора в зависимости от статической нагрузки.
Известна Система управления электромагнитным подвесом ротора (Патент RU 2589718 от 21.04.2015), взятая нами за прототип. Каждый канал системы содержит датчик положения ротора, блок задания положения вала, элемент сравнения, блок обработки сигнала вибрации, пропорциональный, интегральный, дифференциальный, пропорционально-дифференциальный регуляторы, элемент сравнения, пропорциональный регулятор тока, датчик тока, силовой преобразователь и два электромагнита.
Сущность изобретения заключается в обеспечении низкого уровня вибрации и высокого быстродействия решением компоновочной схемы подключения обмоток электромагнитов.
Недостатком системы автоматического управления электромагнитным подвесом ротора является отсутствие возможности плавного изменения положения ротора в зависимости от статической нагрузки, а значит, невозможность сохранять необходимый для компенсации динамических нагрузок запас магнитной силы при возникновении значительной статической нагрузки.
Техническая проблема, решаемая предлагаемым изобретением - создание устойчивой к высоким статическим нагрузкам, быстродействующей системы автоматического управления осевым электромагнитным подшипником ротора с адаптацией к изменению статической силы с широким диапазоном компенсируемых статических сил и низким энергопотреблением.
Технический результат от использования изобретения заключается в повышении устойчивости к высоким статическим нагрузкам, повышении быстродействия и расширении диапазона компенсируемых статических сил системы автоматического управления осевым электромагнитным подшипником ротора с адаптацией к изменению статической силы, а также снижении ее энергопотребления.
Указанный технический результат достигается тем, что осевой канал системы автоматического управления осевым электромагнитным подшипником ротора с адаптацией к изменению статический силы, содержит датчик положения ротора, интегральный регулятор, пропорциональный регулятор, дифференциальный регулятор, пропорционально-дифференциальный регулятор, силовой преобразователь, два электромагнита, блок задания, каждый канал дополнительно снабжен блоком обработки сигнала вибрации, пропорциональным регулятором тока и датчиком тока, причем датчик положения ротора соединен с входом блока обработки сигнала вибрации, выход которого соединен с инверсным входом пропорционального регулятора, интегрального регулятора, дифференциального регулятора, выходы которых подключены к входу пропорционально-дифференциального регулятора, выход которого подключен к пропорциональному регулятору с обратной связью по значению силы тока в обмотках электромагнитов, выход этого регулятора соединен с входом силового преобразователя, к выходу которого подключены обмотки электромагнитов, осевой канал дополнительно снабжен последовательно соединенными между собой блоком расчета осевой силы, блоком расчета смещения, дополнительным элементом сравнения, при этом вход блока расчета осевой силы соединен с выходом интегрального регулятора, вход дополнительного элемента сравнения соединен со входом элемента сравнения и выходом блока задания, при этом блок расчета смещения находится между выходом блока расчета осевой силы и входом дополнительного элемента сравнения.
Таким образом, предлагаемое изобретение позволяет повысить устойчивость работы электромагнитного подшипника при высоких статических нагрузках за счет сохранения запаса магнитной силы, необходимого для компенсации динамических сил; повысить быстродействие системы, за счет уменьшения времени прохождения переходного процесса; расширить диапазон компенсируемых статических сил за счет динамического сокращения зазора между магнитным подшипником и ротором; снизить ее энергопотребление за счет снижения величины протекающих через электромагнит рабочих токов.
Для пояснения описываемого объекта на чертежах (фигурах) приведен перечень чертежей и наименования изображения на них:
Фиг. 1 - функциональная схема осевого канала системы автоматического управления электромагнитным подшипником ротора;
Фиг. 2 - магнитный подвес двухстороннего действия;
Фиг. 3 - зависимость действующей на ротор силы от его смещения;
Фиг. 4 - изменение положения ротора при ступенчатом изменении статической силы на 50 кН;
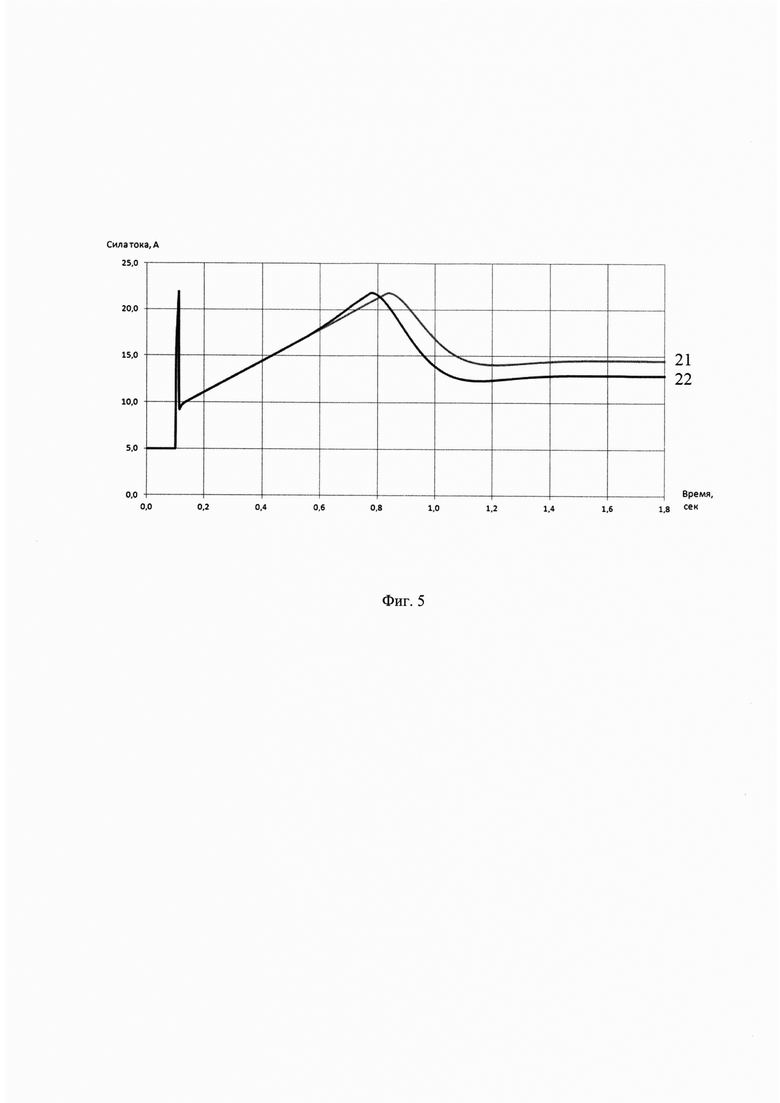
Фиг. 5 - изменение силы тока в электромагните (14) при ступенчатом изменении статической силы на 50 кН.
Осевой канал (фиг. 1) содержит датчик положения ротора (1), блок задания положения вала (2), элемент сравнения (3), блок обработки сигнала вибрации (4), пропорциональный регулятор (5), интегральный регулятор (6), дифференциальный регулятор (7), пропорционально-дифференциальный регулятор (8), элемент сравнения (9), пропорциональный регулятор тока (10), датчик тока (11), силовой преобразователь (12), два электромагнита (13) и (14), блок расчета осевой силы (15), блок расчета смещения (16), дополнительный элемент сравнения (17), ротор (18).
Выход датчика положения ротора (1) соединен со входом элемента сравнения (3), выход которого соединен со входом блока обработки сигнала вибрации (4). Выход блока вибрации (4) соединен со сходом пропорционального (5), интегрального (6) и дифференциального (7) регуляторов, выход интегрального регулятора (6) соединен со входом блока расчета осевой силы (15), выход пропорционального (5) и дифференциального (7) регуляторов соединены со входом пропорционально-дифференциального регулятора (8). Элемент сравнения (9), пропорциональный регулятор тока (10) и силовой преобразователь (12) соединены последовательно и находятся между пропорционально-дифференциальным регулятором (8) и электромагнитами (13, 14). При этом датчик тока (11) находится между выходом силового преобразователя (12) и входом элемента сравнения (9). Вход дополнительного элемента сравнения (17) соединен со входом элемента сравнения (3) и выходом блока задания (2), при этом блок расчета смещения (16) находится между выходом блока расчета осевой силы (15) и входом дополнительного элемента сравнения (17).
Перечисленные выше блоки (2-10) и (15-17) системы автоматического управления электромагнитным подвесом ротора выполнены программно в цифровом контроллере.
В качестве датчика положения ротора (1) может быть применен, например, индуктивный токовихревой датчик с блоком измерения.
Силовой преобразователь (12) представляет собой, например, транзисторный широтно-импульсный преобразователь, состоящий из широтно-импульсного модулятора и транзисторного моста, собранного из трехфазной полумостовой схемы.
В качестве датчика тока (11) может быть применен, например, датчик на основе эффекта Холла, с высоким быстродействием.
Электромагниты (13) и (14) располагаются на статоре роторной машины, например, на одной оси с противоположных сторон от ротора и могут быть выполнены, например, как явнополюсные или с распределенными обмотками.
Обмотки электромагнитов подключаются к диодно-транзисторному мосту таким образом, что общая точка обмотки электромагнитов подключается через транзисторный ключ к «минусу» блока питания.
Блок расчета осевой силы (15) по сути является косвенным датчиком измерения осевой силы и представляет собой программный блок, содержащий характеристику, позволяющую выполнить расчет компенсируемой магнитным подшипником статической силы на основании сигнала интегрального регулятора (6).
Блок расчета смещения (16) представляет собой программный блок, содержащий характеристику, определяющую величину смещения ротора в зависимости от текущей статической силы.
Дополнительный элемент сравнения (17) служит для коррекции определяемого блоком задания положения вала (2) на основании результатов расчета смещения в блоке (16).
Предложенная система автоматического управления осевым электромагнитным подшипником ротора с адаптацией к изменению статической силы работает следующим образом. Изначально ротор находится на страховочных подшипниках. При включении системы управления в каждом канале датчиком положения ротора (1) измеряют отклонение ротора от центрального положения, разницу между поддерживаемым центральным значением положения ротора в блоке задания (2) и блоком расчета смещения (16) после дополнительного блока сравнения (17) подают в блок сравнения (2), где сравнивают с измеренным значением и подают на вход блока обработки сигнала вибрации (4), выход которого подают на вход пропорционального (5), интегрального (6) и дифференциального (7) регуляторов.
В соответствии с передаточными функциями, реализованными в регуляторах (5, 6, 7), сумму выходных значений этих регуляторов подают на вход пропорционально-дифференциального регулятора (8). В соответствии с переданной функцией, реализованной регулятором (8), выходное значение подают на вход элемента сравнения (9), где из этого значения вычитают измеренное с помощью датчика тока (11) значение силы тока в обмотках электромагнитов (13, 14). Разницу подают на вход пропорционального регулятора тока (10). Задача этого регулятора (10) - поддержание значения тока, пропорционального выходному значению регулятора (8), а также компенсация постоянной времени Тэ обмоток электромагнитов (13, 14). Выходное значение пропорционального регулятора тока (10) -это значение для силового широтно-импульсного преобразователя (12), пропорционально которому силовым преобразователем (12) регулируют напряжение на обмотках электромагнитов (13) и (14).
В результате в обмотках электромагнитов (13) и (14) формируются такие токи, которые создают результирующую силу, поднимающую ротор со страховочных подшипников и удерживающую его в центральном положении по датчику положения ротора (1) в рабочих режимах.
Выход интегрального регулятора (6) также подают на вход блока расчета осевой силы (15), где рассчитывают осевое усилие, действующее на ротор, значение которого передают на вход блока расчета смещения (16), где определяют значение необходимого уровня смещения ротора, которое передают на вход.
В качестве пояснения приводим следующее.
В магнитном подвесе двухстороннего действия (Фиг. 2), за счет изменения силы тока  протекающего через электромагниты (13, 14), силами притяжения (F1 и F2) регулируется положение ротора (18), на который действует статическая сила Q.
протекающего через электромагниты (13, 14), силами притяжения (F1 и F2) регулируется положение ротора (18), на который действует статическая сила Q.
Для компенсации статических сил и удержания ротора (18) в заданном положении в магнитном подшипнике должно выполняться равенство (1):

где Q - статическая сила, действующая на ротор (18);
F1 и F2 - силы, действующие на ротор (18) со стороны электромагнитов (13) и (14) (Фиг. 2) соответственно.
При значительном увеличении внешней статической силы возникает ситуация, когда электромагнит (13) исключается из процесса регулирования и удержание ротора (18) осуществляется только за счет силы притяжения F2 электромагнита (14).
Известно, что сила, действующая на ротор (18) со стороны электромагнита (14), определяется формулой (2) [1, с. 55]:

где CL - параметр, определяемый конструкцией магнитного подшипника,
 - сила тока в электромагните (14);
- сила тока в электромагните (14);
δ - зазор между ротором и электромагнитом (14), определяемый конструкцией;
у - смещение ротора от заданного положения.
Очевидно, что при смещении ротора (18) к электромагниту (14), сила, действующая на ротор (18) со стороны электромагнита (14), увеличивается. На фиг. 3 представлена зависимость действующей на ротор (18) силы от его смещения из начального положения δ, при условии, что ток, протекающий через электромагнит (14), остается неизменным.
Таким образом, необходимая для компенсации внешнего статического усилия сила может быть достигнута при меньшей силе тока в электромагните (14) за счет приближения ротора (18) к электромагниту (14).
Моделирование процесса на компьютере показывает, что сокращение зазора между ротором и электромагнитом, противодействующем внешней статической силе, на 100 мкм (на 11% от номинального зазора) приводит к пропорциональному снижению силы тока в этом электромагните.
На фиг. 4, 5 представлен переходной процесс в осевом магнитном подшипнике при ступенчатом изменении действующей на ротор статической силы на 50 кН. Фиг. 4 - изменение положения ротора при ступенчатом изменении статической силы на 50 кН. Фиг. 5 - изменение силы тока в электромагните (14) при ступенчатом изменении статической силы на 50 кН.
На графиках кривые №19, 22 - переходной процесс, соответствующий системе с блоком расчета осевой силы и блоком расчета смещения, кривые №20, 21 - без блока расчета осевой силы и блока расчета смещения.
Магнитный подшипник не способен мгновенно справиться со ступенчатым изменением статической силы на 50 кН. При возникновении некомпенсированного усилия ротор за доли секунды смещается к страховочному подшипнику, несмотря на то, что система управления пытается удержать его в заданном положении за счет дифференциального звена регулятора, резко увеличивая силу тока, протекающего через электромагнит. В течение 0,8 секунды ротор остается прижатым к страховочному подшипнику, пока на выходе интегрального звена регулятора не сформируется значение, достаточное для возвращения ротора в заданное положение.
Согласно фиг. 5, при включенном блоке расчета осевой силы и блоке расчета смещения ток в электромагните нарастает быстрее (кривая №22), соответственно и переходной процесс занимает меньше времени, что свидетельствует об улучшении динамических характеристиках магнитного подшипника. При отключенном блоке расчета осевой силы и блоке расчета смещения (кривая №21) ротор возвращается в исходное положение, соответствующее начальному зазору. При включенном блоке расчета осевой силы и блоке расчета смещения ротор возвращается в положение, которое на 100 мкм приближено к электромагниту. При этом моделирование показывает, что сила тока в электромагните (14) на 11% ниже, чем в первом случае (13,0 А вместо с 14,5 А).
Снижение силы тока в электромагните приведет к снижению нагрева обмоток электромагнита на 19% (при использовании электромагнита с активным сопротивлением обмотки равным 2,2 Ом мощность потребления, выделяемая в обмотке электромагнита в виде тепла, снизится с 462 Вт до 372 Вт).
Величина смещения ротора может динамически изменяться в соответствии с заданным алгоритмом в зависимости от текущей статической нагрузки, действующей на ротор. При этом необходимо учитывать, что при смещении ротора должен выдерживаться безопасный зазор, исключающий контакт вращающихся частей ротора с неподвижными частями статора.
Правильность технического решения подтверждается вводом в промышленную эксплуатацию системы автоматического управления для ГПА-16 «Волга» с электромагнитными подшипниками ротора на КС-02 «Новоарзамасская» Арзамасского ЛПУМГ филиала ООО «Газпром трансгаз Нижний Новгород».
Таким образом, предложенная схема автоматического управления осевым электромагнитным подшипником ротора с адаптацией к изменению статической силы обеспечивает повышение устойчивости работы магнитного подшипника при высоких статических нагрузках, повышение быстродействия системы, расширение диапазона компенсируемых статических сил, а также снижение энергопотребления.
Список источников:
1. Журавлев Ю.Н. Активные магнитные подшипники: Теория, расчет, применение. - СПб.: Политехника, 2003 - 206 с.
2. Никаноров В.В., Таганов Р.С., Сальников С.В., Москалев А.В., Витковский Д.В., Веремеев В.Е., Макаричев Ю.А., Стариков А.В. Цифровая система управления электромагнитными подшипниками центробежных компрессоров // Газовая промышленность. - 2014. - №10. - С. 57-62.
3. Седов В.В., Бандалетов В.Ф., Никитин A.M. Чернышев В.И., Щербаков Г.Д. Центробежные компрессоры природного газа отечественного производства в ОАО «Газпром». - 2013. - №8. - С. 18-23.
| название | год | авторы | номер документа |
|---|---|---|---|
| УЧЕБНЫЙ СТЕНД СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМИ ПОДШИПНИКАМИ ВАЛА РОТОРА ЦЕНТРОБЕЖНОГО НАГНЕТАТЕЛЯ ГАЗОПЕРЕКАЧИВАЮЩЕГО АГРЕГАТА | 2021 |
|
RU2780551C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2015 |
|
RU2589718C1 |
| Система управления электромагнитным подвесом ротора | 2024 |
|
RU2831082C1 |
| Способ управления положением ротора электрической машины на бесконтактных подшипниках (варианты) и электрическая машина для его реализации | 2017 |
|
RU2656871C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМИ ПОДШИПНИКАМИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2290746C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2011 |
|
RU2460909C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2014 |
|
RU2566671C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2008 |
|
RU2395150C2 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2007 |
|
RU2345464C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 1999 |
|
RU2181922C2 |




Изобретение относится к области машиностроения. Технический результат - повышение устойчивости к высоким статическим нагрузкам, повышение быстродействия и расширение диапазона компенсируемых статических сил системы автоматического управления осевым электромагнитным подшипником ротора. Система автоматического управления осевым электромагнитным подшипником ротора включает осевой канал, содержащий датчик положения ротора (1), блок задания положения вала (2), элемент сравнения (3), блок обработки сигнала вибрации (4), пропорциональный регулятор (5), интегральный регулятор (6), дифференциальный регулятор (7), пропорционально-дифференциальный регулятор (8), элемент сравнения (9), пропорциональный регулятор тока (10), датчик тока (11), силовой преобразователь (12), два электромагнита (13) и (14), блок расчета осевой силы (15), блок расчета смещения (16), дополнительный элемент сравнения (17). Вход блока расчета осевой силы (16) соединен с выходом интегрального регулятора (6), вход дополнительного элемента сравнения (17) соединен с входом элемента сравнения (3) и выходом блока задания (2). Блок расчета смещения (16) находится между выходом блока расчета осевой силы (15) и входом дополнительного элемента сравнения (17). 5 ил.
Система автоматического управления осевым электромагнитным подшипником ротора с адаптацией к изменению статической силы, осевой канал которой содержит датчик положения ротора, интегральный регулятор, пропорциональный регулятор, дифференциальный регулятор, пропорционально-дифференциальный регулятор, силовой преобразователь, два электромагнита, блок задания, каждый канал дополнительно снабжен блоком обработки сигнала вибрации, пропорциональным регулятором тока и датчиком тока, причем датчик положения ротора соединен с входом блока обработки сигнала вибрации, выход которого соединен с инверсным входом пропорционального регулятора, интегрального регулятора, дифференциального регулятора, выходы которых подключены к входу пропорционально-дифференциального регулятора, выход которого подключен к пропорциональному регулятору с обратной связью по значению силы тока в обмотках электромагнитов, выход этого регулятора соединен с входом силового преобразователя, к выходу которого подключены обмотки электромагнитов, отличающийся тем, что осевой канал дополнительно снабжен последовательно соединенными между собой блоком расчета осевой силы, блоком расчета смещения, дополнительным элементом сравнения, при этом вход блока расчета осевой силы соединен с выходом интегрального регулятора, вход дополнительного элемента сравнения соединен с входом элемента сравнения и выходом блока задания, при этом блок расчета смещения находится между выходом блока расчета осевой силы и входом дополнительного элемента сравнения.
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2015 |
|
RU2589718C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 1999 |
|
RU2181922C2 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2014 |
|
RU2566671C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2008 |
|
RU2395150C2 |
| US 4642500 A1, 10.02.1987 | |||
| Автомат для запрессовки деталей типа вал-втулка | 1982 |
|
SU1109305A1 |

