Способ относится к области геопространственных измерений, а именно к измерению расстояний. Применяться изобретение может при наблюдении за потенциально опасными инженерными объектами.
Аварии на атомных электростанциях, исследовательских реакторах, хранилищах временного и долговременного хранения ядерного топлива и радиоактивных отходов могут повлечь за собой техногенные катастрофы глобального масштаба. В чрезвычайной ситуации геопространственные измерения внешней оболочки аварийного объекта (далее потенциально опасного объекта) являются процессом повышенной опасности, требующим нахождения специалистов на максимально возможной дистанции от объекта, но с получением максимально полной информации в реальном времени с относительно высокой точностью.
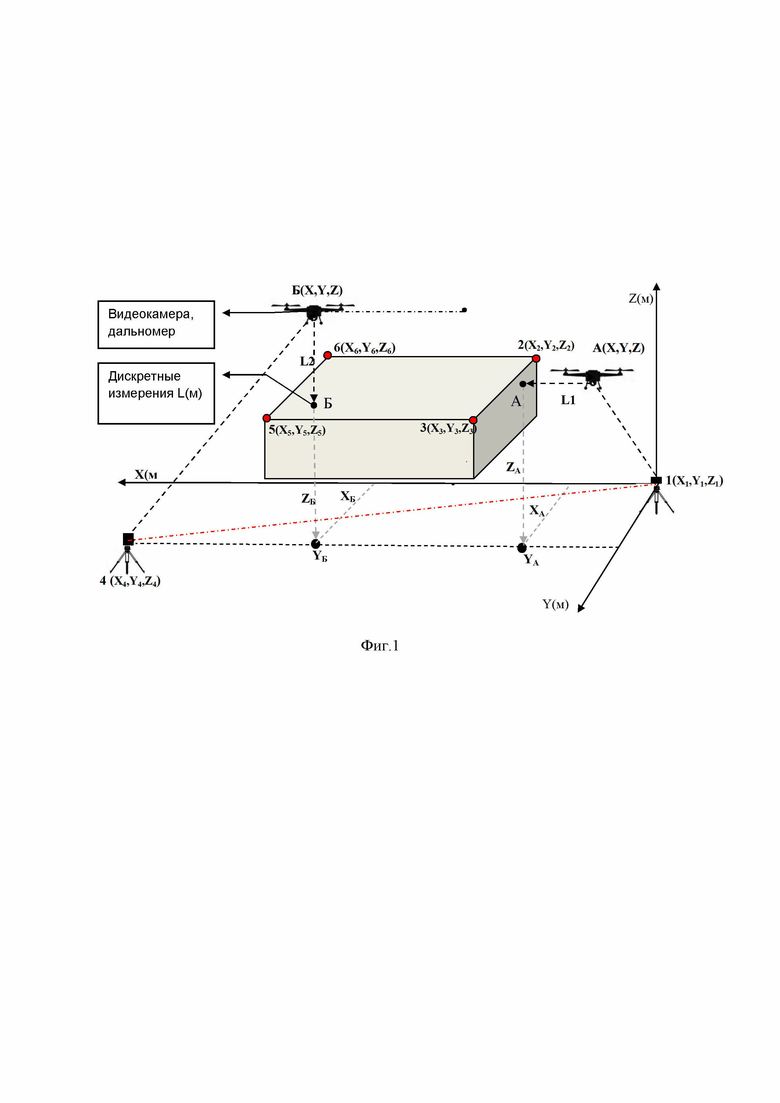
Для наблюдений в чрезвычайных ситуациях за установками, зданиями, сооружениями, прочими объектами строительства автором разработана концептуальная схема (фиг. 1) геопространственных измерений для определения пространственных параметров внешней оболочки потенциально опасного объекта, позволяющих снизить риск для жизни человека в процессе измерений.
Известен способ определения координат наземных объектов при фотосъемке с беспилотного летательного аппарата по патенту RU2726902 (аналог). На беспилотный летательный аппарат устанавливают бортовой модуль спутниковой навигации, инерциальный модуль угловой ориентации, цифровую фотокамеру, модуль передачи данных и модуль синхронизации. С помощью бортовых модулей определяются координаты, путевой угол и высота беспилотного летательного аппарата.
Недостатком такого способа является ограничение максимально допустимого поля обзора единственным беспилотным летательным аппаратом, а значит и его временем работы, которое может отводиться для сбора информации о наблюдаемом объекте.
Известен способ применения роботизированного тахеометра и беспилотного летательного аппарата для определения координат наземного объекта по патенту RU2809177 (прототип).
Сущность заявленного способа определения координат наземного объекта заключается в следующем. Координаты наземного объекта определяются с помощью роботизированного тахеометра и беспилотного летательного аппарата, на гиростабилизированной платформе которого закреплены визирная цель, приёмопередатчик, видеокамера, лазерный дальномер таким образом, чтобы оптическая ось видеокамеры и луч лазерного дальномера были направлены вертикально вниз.
Недостатком изобретения является применение единственной пары беспилотного летательного аппарата и роботизированного тахеометра, что выступает ограничивающим фактором автономности и углового поля.
Задача изобретения – создание безопасного для жизни человека способа мониторинга потенциально опасного объекта.
Технический результат заключается в повышении эффективности мониторинга потенциально опасного объекта за счет постоянного обеспечения в режиме реального времени оперативного выполнения оценки состояния внешней оболочки потенциально опасного объекта и оценки точности геопространственных измерений с применением описанного способа, а именно с использованием теории мультиагентных систем, что обеспечивает постоянный мониторинг объекта без постоянного присутствия человека около потенциально опасного объекта, что в условиях техногенной аварии может быть единственно возможным способом контроля состояния внешней оболочки потенциально опасного объекта.
Сущность способа заключается в том, что при мониторинге потенциально опасного объекта производятся геопространственные измерения для определения пространственных параметров внешней оболочки потенциально опасного объекта путем выполнения геопространственных измерений основанных на определении пространственных координат квадрокоптеров относительно базовых пунктов роботизированными электронными тахеометрами и измерении расстояния лазерным дальномером от квадрокоптера до внешней оболочки потенциально опасного объекта. Данные, снимаемые с тахеометров, обрабатываются при помощи специализированного программного обеспечения и определяются отклонения геометрических параметров от базовой оболочки, образующейся в ходе аппроксимации всех точек исходной математической модели потенциально опасного объекта.
Осуществление изобретения может быть описано технологией, которая содержит следующие операции (фиг. 1): в условной пространственной системе координат с использованием роботизированных электронных тахеометров определяются координаты базовых пунктов их установки ((X1,Y1,Z1), (X4,Y4,Z4)); относительно двух базовых пунктов 1 и 4 определяются пространственные координаты контрольных точек ((X2,Y2,Z2), (X3,Y3,Z3), (X5,Y5,Z5), (X6,Y6,Z6)), определяющих верхнюю оболочку потенциально опасного объекта; по контрольным точкам строится уравнение плоскости, которая будет являться исходной (базовой) математической моделью для определения пространственного состояния верхней оболочки потенциально опасного объекта.
Наличие контрольных точек (2, 3, 5, 6) (фиг. 1) позволяет выполнить оценку точности измерений в результате наведения квадрокоптеров с применением видеокамер на эти точки и повторных определений их координат с помощью электронных тахеометров. Отметим, что координата Z вычисляется по измеренному расстоянию лазерным дальномером от квадрокоптера до контрольной точки:  .
.
Расхождение между координатами контрольных точек, определенных электронными тахеометрами и квадрокоптером, характеризует реальную точность измерений (1), которая определяется величиной среднеквадратической ошибки (СКО).

где  – координаты контрольных точек, полученные при помощи электронных тахеометров, i=1, 2..n - количество повторных измерений.
– координаты контрольных точек, полученные при помощи электронных тахеометров, i=1, 2..n - количество повторных измерений.
На основании конструктивных особенностей и формы потенциально опасного объекта определяется тип исходной математической поверхности, задается необходимая дискретность измерений для пар квадрокоптер-РЭТ, осуществляется определение координат точек внешней оболочки потенциально опасного объекта.
Учитывая выбранную для аппроксимации объекта математическую поверхность на основе теории мультиагентных систем, генерируются траектории квадрокоптеров, что позволяет проводить съемку внешней оболочки (одновременно верхней и боковой) объекта.
Дискретные данные фильтруются по методу медианного фильтра и поступают в блок обработки данных, где вычисляются координаты поверхности (Xi,Yi,Zi), где i=1,2..m.
Фильтрация дискретных данных применяется для определения реальной точности координаты Z и для построения внешней оболочки ПОО. Алгоритм медианного фильтра осуществляется поэтапно: 1) производится заполнение массива исходными данными; 2) выполняется ранжирование значений; 3) выбирается медианное значение из ранжированного ряда.
Медианный фильтр представляет собой оконный фильтр, последовательно скользящий по массиву сигнала и возвращающий на каждом шаге один из элементов, попавших в окно (апертуру) фильтра. Выходной сигнал  скользящего медианного фильтра шириной
скользящего медианного фильтра шириной  для текущего отсчета
для текущего отсчета  формируется из входного временного ряда
формируется из входного временного ряда  в соответствии с выражением:
в соответствии с выражением:

где  ;
;
 – элементы вариационного ряда, т.е. ранжированные в порядке возрастания значений;
– элементы вариационного ряда, т.е. ранжированные в порядке возрастания значений;
 .
.
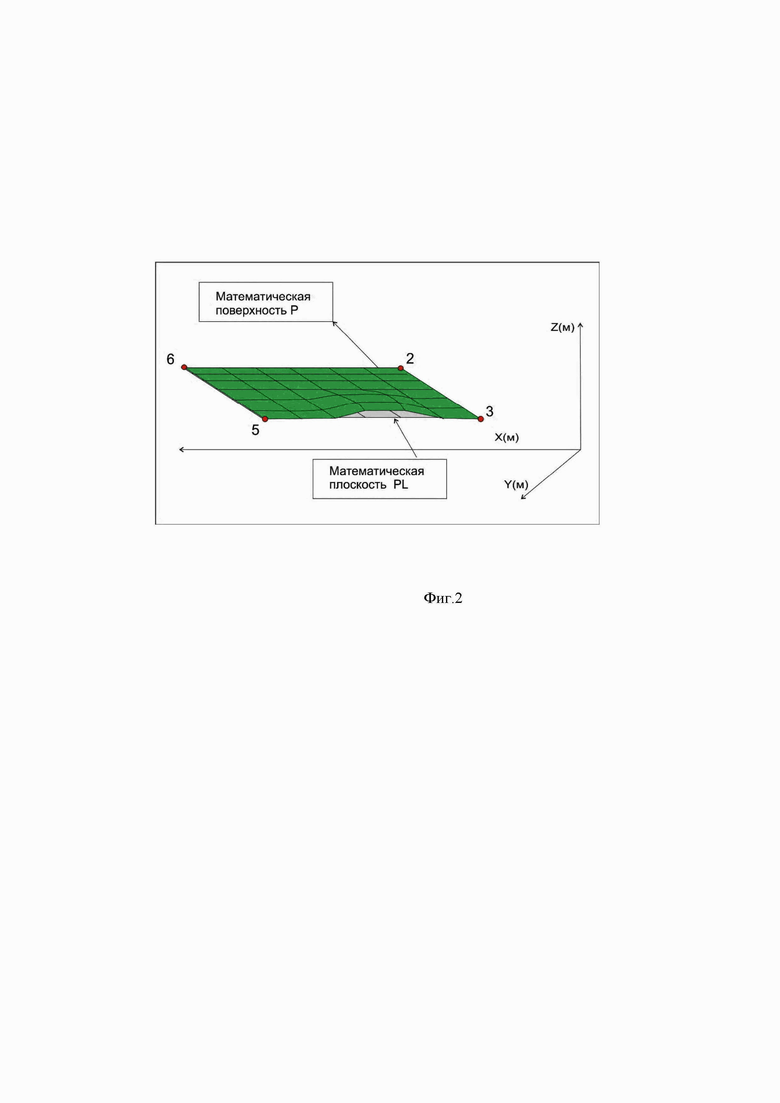
По значениям Xi,Yi,Zi, полученным после фильтрации выполняется аппроксимация множества точек поверхности методом сплайн-интерполяции для получения поверхности Р (фиг. 2). Для определения отклонения геометрических параметров верхней оболочки ПОО от проектных значений строится плоскость PL (фиг. 2), проходящая через контрольные точки ПОО и соответствующая проектному значению.
По формуле вычисляются разности от соответствующей точки поверхности до плоскости.
 ,
,
где Z1 – координата точки математической поверхности, характеризующая пространственное состояние ТО;
Z2 – координата точки плоскости, которая принимается за проектное значение.
Результат, полученный по полученным данным, визуализирует отклонение между математической поверхностью P и математической плоскостью PL (фиг. 2), что позволяет сделать вывод о состоянии верхней оболочки в ходе выполнения геопространственных измерений.
Способ относится к области геопространственных измерений и может применяться при наблюдении за потенциально опасными инженерными объектами. Сущность способа заключается в том, что при мониторинге потенциально опасного объекта производят геопространственные измерения для определения пространственных параметров внешней оболочки потенциально опасного объекта путем выполнения геопространственных измерений, основанных на определении пространственных координат квадрокоптеров относительно базовых пунктов роботизированными электронными тахеометрами и измерении расстояния лазерным дальномером от квадрокоптера до внешней оболочки потенциально опасного объекта. Данные, снимаемые с тахеометров, обрабатывают и определяют отклонения геометрических параметров от базовой оболочки, образующейся в ходе аппроксимации всех точек исходной математической модели потенциально опасного объекта. Техническим результатом заявленного изобретения является обеспечение непрерывного мониторинга объекта. 2 ил.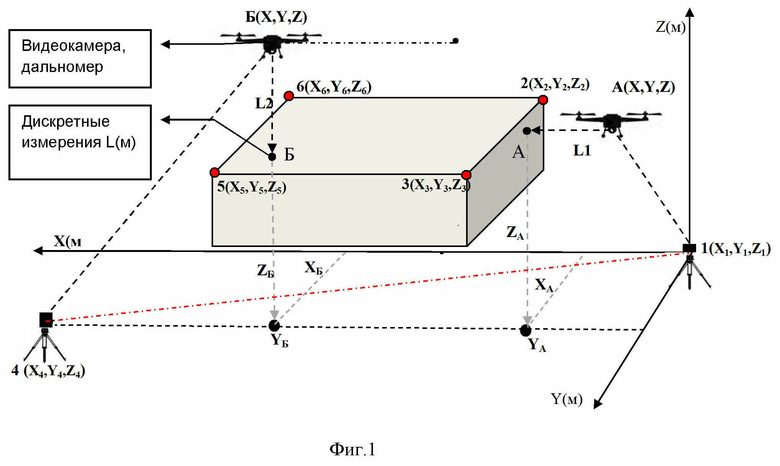
Способ мониторинга геопространственных изменений потенциально опасного объекта (ПОО), основанный на применении роботизированных электронных тахеометров (РЭТ) и квадрокоптеров, на которых монтируют отражательную призму 360°, дальномер, видеокамеру, микрокомпьютер с возможностью подключения к сети Интернет, отличающийся тем, что определяют координаты базовых пунктов роботизированных электронных тахеометров; определяют относительно двух базовых пунктов пространственные координаты контрольных точек, формирующих верхнюю оболочку ПОО; формируют плоскость для определения пространственного состояния верхней оболочки ПОО; проводят оценку точности измерений при помощи наведения квадрокоптеров на контрольные точки, при этом: на основании конструктивных особенностей и формы ПОО задают дискретность измерений для пар квадрокоптер-РЭТ, генерируют траектории квадрокоптеров на основе теории мультиагентных систем, обрабатывают посредством блока обработки данных дискретные значения координат точек поверхности с проведением медианной фильтрации; выполняют аппроксимацию множества точек для получения поверхности P; формируют плоскость PL, определяющую геометрические отклонения параметров верхней оболочки ПОО от проектных значений; визуализируют отклонения между полученной поверхностью P и сформированной плоскостью PL для определения состояния верхней оболочки ПОО, определяют разности от соответствующей точки поверхности до плоскости:
 ,
,
где Z1 – координата точки поверхности P; Z2 – координата точки плоскости PL, принимаемая за проектное значение.
| СПОСОБ ПРИМЕНЕНИЯ РОБОТИЗИРОВАННОГО ТАХЕОМЕТРА И БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ НАЗЕМНОГО ОБЪЕКТА | 2023 |
|
RU2809177C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ НАЗЕМНЫХ ОБЪЕКТОВ ПРИ ФОТОСЪЁМКЕ С БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2726902C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ФОТОГРАФИРУЕМЫХ С КОСМИЧЕСКОГО АППАРАТА ЗЕМНЫХ ОБЪЕКТОВ | 2014 |
|
RU2587539C2 |
| CN 108845335 A, 20.11.2018. | |||

