Изобретение относится к безэкипажным катерам, а именно к безэкипажным катерам малого/сверхмалого водоизмещения модульной конструкции, собираемых из предварительно изготовленных секций, пригодных для размещения различной полезной нагрузки и может быть использовано для решения широкого круга военных и исследовательских задач.
Известен безэкипажный катер «КиберБоат-330» https://sdelanounas.ru/blogs/135181/ дата обращения 01.10.2023 г. Указанный аппарат имеет длину 3.3 м, ширину 1.58 м, осадку 0.34 м, водоизмещение 550 кг, корпус изготовлен из алюминиевого композита со сверхмолекулярным полиэтиленом. Имеет систему со вспененным полиэтиленом для обеспечения плавучести при повреждениях, гибридную энергоустановку - ДВС на 99 кВт и электродвигатель на 25 кВт, работающий на водомет, аккумуляторные батареи. Управление автономное и ручное, через канал радиосвязи.
Недостатками известного устройства являются: большая масса (более 500 кг), что требует для его перемещения специальных средств (лебедок, кран-балок, прицепов), применение ДВС способствует обнаружению аппарата по звуку его работы, отсутствует возможность быстрой разборки аппарата. Вместе с этим, на производстве требуется наличие оснастки для работы с алюминиевым композитом.
Известен безэкипажный тримаран-разведчик типа волнорез с подводными крыльями «М-80А» https://topwar.ru/151264-avtonomnye-morskie-sistemy-na-strazhe-interesov-kitaya/ Николай Антонов «Автономные морские системы на страже интересов Китая» // Военное обозрение. 2018, дата обращения 01.10.2023 г. Указанный аппарат имеет длину 4.8 м, ширину 2.35 м, высоту над водой 1.35 м, водоизмещение около 1 т. Корпус выполнен из вспененного углепластика с двумя электродвигателями в гондолах, обеспечивающих движение со скоростью до 10 узлов. Может нести до 150 кг полезной нагрузки в отсеке с габаритами 1.5x1.2x0.5 м. Имеет автономный, полуавтономный и телеуправляемый режимы работы.
Недостатками известного устройства являются: большая масса - более 1 т, что исключает возможность его перемещения без применения грузоподъемных средств, отсутствует возможность быстрой разборки аппарата на борту судна-носителя, значительная осадка и отсутствие защиты гребных винтов затрудняют его применение в районах с малыми глубинами.
Базовым объектом является безэкапижный катамаран «Кадет-М» https://ghostpi.spbstu.ru/product/kadet-m/ дата обращения 01.10.2023 г. Указанный аппарат имеет длину 2 м, ширину 2 м, высоту на водой 1.5 м, водоизмещение 140 кг, углепластиковый корпус с алюминиевой рамой и обеспечивает прием 3-х сменных модулей с исследовательским оборудованием, снабжен аккумуляторными батареями и солнечными панелями. Может управляться как автономно, так и через канал радиосвязи.
Однако известный аппарат имеет конструкцию исключительно катамаранного типа, то есть большую ширину, только 3 сменных модуля с исключительно исследовательской полезной нагрузкой, высокий (более 1 м) силуэт надводной части, солнечные панели, облегчающие поиск аппарата в оптическом диапазоне, конструкцию, требующую наличия на производстве аппаратов для резки листового металла, сварки, вакуумирования.
Задача настоящего изобретения заключается в создании автономно управляемой или телеуправляемой универсальной безэкипажной платформы сверхмалого водоизмещения, формируемой по модульному принципу с простой конструкцией и быстрой сборкой для выполнения широкого круга задач на открытом море и внутренних водоемах.
Указанная задача решается благодаря тому, что в универсальной безэкипажной надводной модульной платформе сверхмалого водоизмещения, содержащей постоянные и сменные модули, оборудованные сборками аккумуляторных батарей с контроллерами зарядки, аппаратурой управления, приемником сигналов, электродвигателями, взаимодействующими с гребными винтами, надстройкой со средствами наблюдения, дополнительно введены фиксаторы, комбинированный разъем, с оптическим каналом передачи информации и подпружиненными контактами, мачта с антенной. Указанный фиксатор состоит из стакана с каналом для бобышки и крышкой с эллипсоидным отверстием на верхней части стакана для взаимодействия с эллипсоидной головкой. Головка в нижней части закреплена с осью, на которой имеется пружина для взаимодействием с отверстиями на бобышке. Указанный комбинированный разъем содержит корпус с размещенным внутри него обоймой и подпружиненными контактами, уплотнительной прокладкой. При этом, корпус содержит каналы оптических линий связи с защитными оптическими элементами для возможности размещения в каждом из них фотоэлементов (например, светодиода или фотодиода).
Техническим результатом является обеспечение возможности производства платформы на технологически слабо оборудованных площадках; возможность ремонта отдельных узлов модуля в корабельных/полевых условиях, а в случае серьезных повреждений модуля его быстрая замена на исправный; обеспечение гибкого подхода к формированию облика платформы; простота интеграции новых модулей в конструкцию с уже существующими модулями.
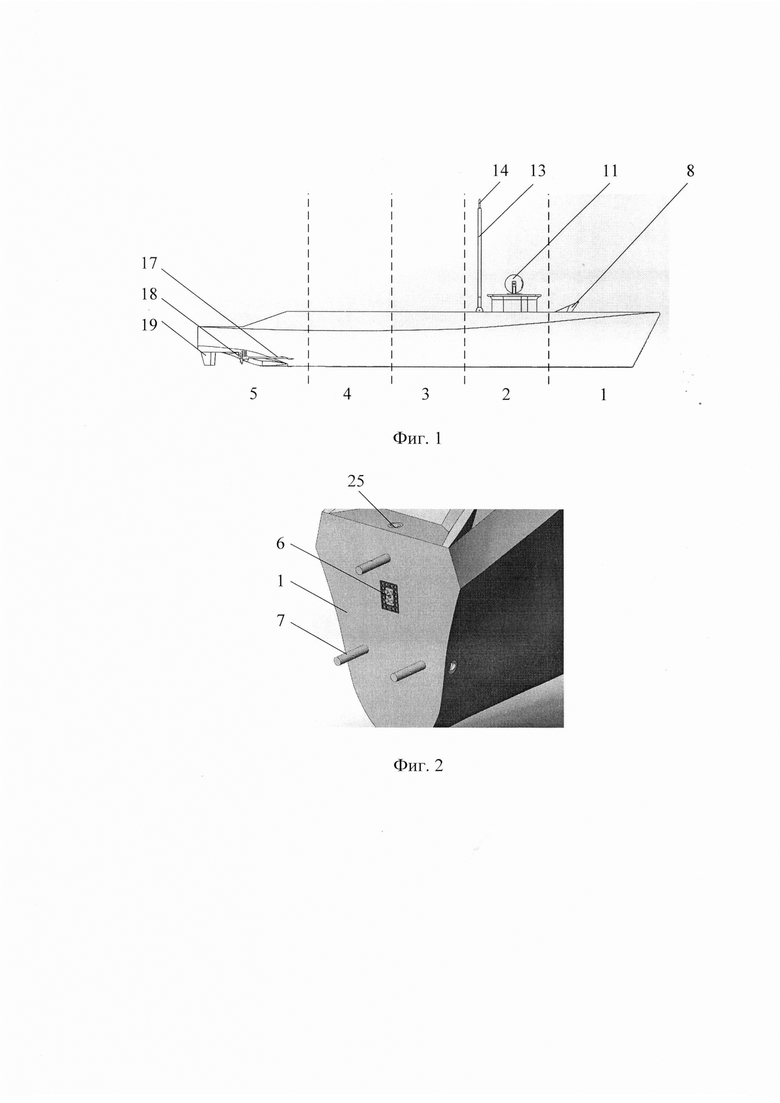
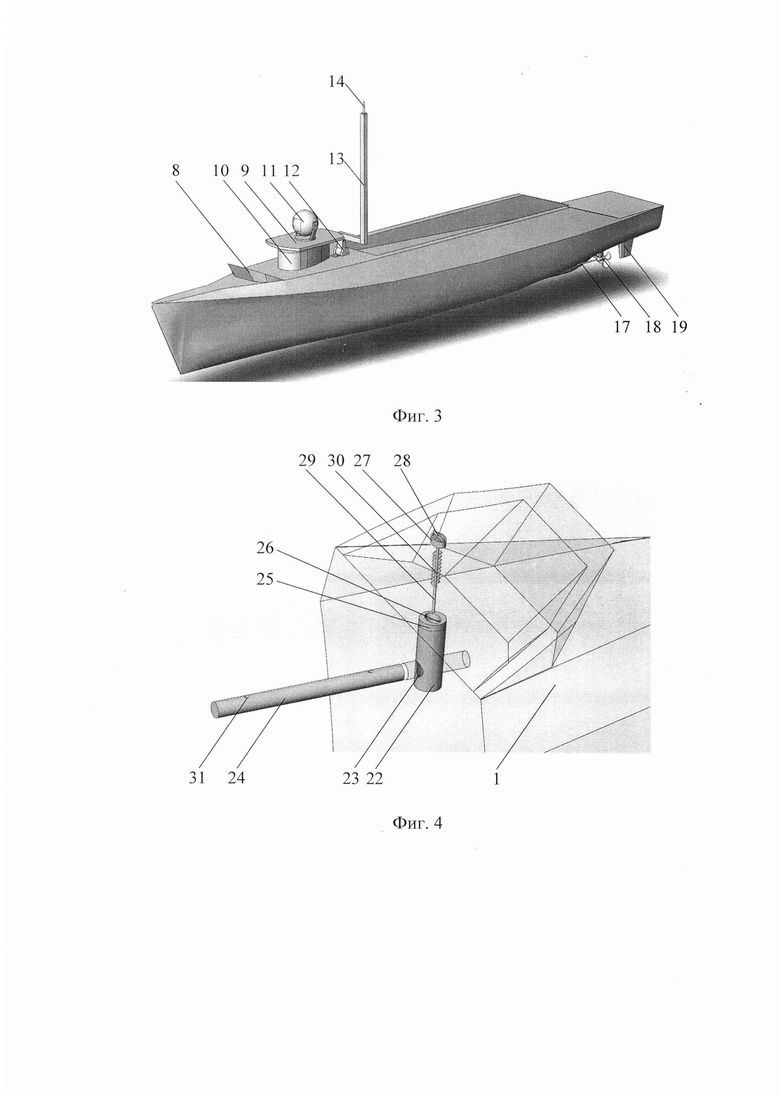
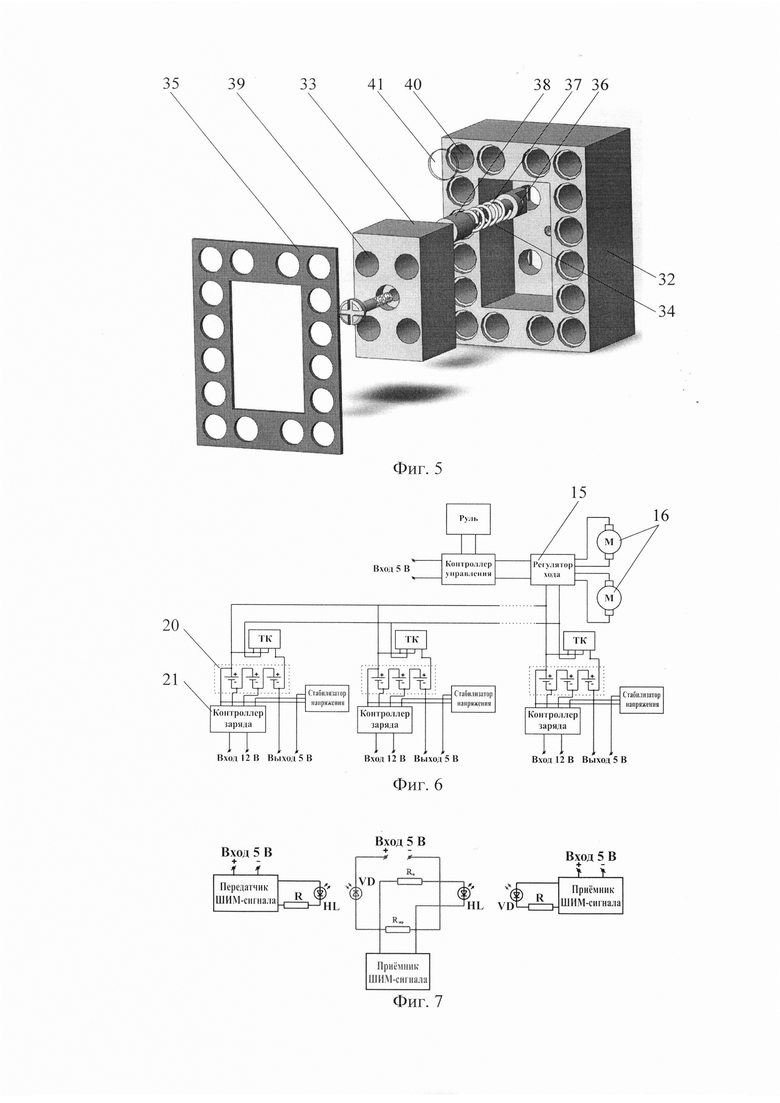
Изобретение поясняется чертежами. На фиг. 1 - вид сбоку на универсальную безэкипажную надводную модульную платформу; на фиг. 2 - размещение на модуле фиксаторов и комбинированного разъема, на фиг. 3 - общий вид платформы с поднятой мачтой связи, на фиг. 4 - размещение фиксатора на корпусе; на фиг. 5 - комбинированной разъем в разобранном виде, на фиг. 6 - электрическая схема общая; на фиг. 7 - электрическая схема оптического канала связи.
Универсальная безэкипажная надводная модульная платформа сверхмалого водоизмещения состоит из постоянных 1, 2, 3, 4, 5 и дополнительных (на фигуре не показаны) модулей (отсеков) с положительной плавучестью.
Модуль 1 (носовой) предназначен для формирования обводов носовой оконечности, размещения приборов регистрации контакта с целью и включает комбинированный разъем 6 на носовой переборке, комплект фиксаторов 7 и волноотбойник 8. Модуль 2 (командный) включает в себя площадку 9 надстройки 10 со средства наблюдения 11 (видеокамера с приводами наведения), кронштейном мачты 12, заваливающейся мачтой 13, антенной 14. Внутри модуля размещен приемник сигналов телеуправления (для режима телеуправления), контроллер управления движением катера (как для режима телеуправления, так и для автономного режима), комплект комбинированный разъемов 6 (по одному на носовой и кормовой переборке), комплект фиксаторов 7. Модули 3 и 4 (аккумуляторные) содержат комплект комбинированных разъемов 6 (по одному на носовой и кормовой переборке), комплект фиксаторов 7. Модуль 5 (двигательный) содержит, регулятор хода 15, электродвигатели 16, роторы которых, через валы 17 винтов, установленных на кронштейнах валолинии, взаимодействуют с гребными винтами 18, руль 19 с сервоприводом управления, комбинированный разъем 6 (на носовой переборке), комплект фиксаторов 7. Все модули 1-5 содержат одну или несколько сборок аккумуляторных батарей 20 с контроллерами зарядки 21.
К дополнительным модулям относятся все модули, имеющие обводы в виде цилиндрической вставки на основе шпангоута кормовой переборки модуля 2, в том числе и с дополнительными корпусами (тримаранные схемы), снабженные комплектом комбинированных разъемов 6 и фиксаторов 7, дополнительной функциональной нагрузкой и/или аккумуляторами 20. Они монтируются между постоянными модулями 2 и 3. Число и состав дополнительных модулей может варьироваться в зависимости от задач, стоящих перед безэкипажным катером.
Фиксатор 7 содержит стакан фиксатора 22, расположенный в корпусе модуля с каналом 23 для бобышки 24, расположенный на стенке в нижней части стакана фиксатора 22, на верхней части смонтирована крышка 25 с эллипсоидным отверстием и пазом 26 для взаимодействия с эллипсоидной головкой 27. Головка 27 в верхней части содержит зуб 28, в нижней части закреплена с осью 29, на которой имеется пружина 30 со свободным перемещением по оси 29. Бобышка 24 имеет пару отверстий 31 для взаимодействия с концом оси 29.
Комбинированный разъем 6 состоит из корпуса 32, размещенного внутри него обоймы 33 с подпружиненными контактами 34, уплотнительной прокладки 35. Подпружиненный контакт 34 состоит из контактной площадки 36 со штоком, закрепленной на корпусе 32, на которой монтируется пружина 37, и подвижного контакта 38, с возможностью перемещения в канале 39 обоймы 33. Корпус 32 содержит каналы оптической линии связи 40 с защитными оптическими элементами 41 для размещения в них свето/фотоэлементов.
Изобретение работает следующим образом. Каждый модуль 1-5 имеет на своей переборке, смежной с другим модулем несколько фиксаторов 7, предназначенных для сборки модулей друг с другом и комбинированный разъем 6 для обмена информацией между модулями через оптические линии связи и подачи силового электропитания в энергетическую систему платформы. Для сборки модулей в канал 23 стакана фиксатора 22 вводят бобышку 24, так, чтобы она прошла насквозь. Сверху, через эллипсоидный отверстие в крышке 25, опускают головку 27 с осью 29 и пружиной 30, при этом конец оси 29 входит в ответную часть отверстия 31 бобышки 24, продавливая до тех пор, пока головка 27 не выйдет из эллипсоидного выреза крышки 25, затем поворачивают на 90° и отпускают. Под действием пружины 30, головка 27 поднимется и зубом 28 головки 27 войдет в пазы 26 крышки 25, обеспечивая фиксацию оси 29 в отверстии 31 бобышки 24. Аналогичным образом происходит сборка фиксатора на смежном модуле.
При стыковке модулей 1-5 друг с другом происходит автоматическая стыковка комбинированного разъема 6. При этом подпружиненный контакт 34 упирается в ответную площадку (на фигуре не показана) подвижным контактом 38. Подвижный контакт 38 поджимается пружиной 37, находящейся в канале 39 обоймы 33 и усилие передается на корпус 32 разъема 6, таким образом обеспечивается надежный электрический контакт двух совмещенных разъемов. Контактная площадка 36, являясь основой подпружиненного контакта 34, служит для подключения силовых проводников модулей. При стыковке половин разъема, каналы оптической линии связи 40 находятся друг напротив друга и в близком расположении с соседними. Для предотвращения паразитной засветки, а также защиты разъема от влаги и пыли служат уплотнительная прокладка 35 и защитные оптические элементы 41. Обойма 33 служит для удобства монтажа, обслуживания и ремонта электрических контактов а также является направляющими подпружиненных контактов 34.
Для размещения свето/фотодиодов, образующих оптическую линию связи в корпусе 32 смонтированы каналы 40. В каждом канале могут располагаться свето- или фотодиоды, образующие при парном размещении на смежных разъемах оптическую линию связи для передачи информации (ШИМ-сигнала) в одном направлении. Соотношение входящих-выходящих каналов, образуемых одной парой разъемов 7, может быть любым в зависимости от задач и особенностей конструкции модулей.
В каждом модуле 1-5 располагается не менее одной сборки аккумуляторных батарей 20 с контроллером заряда 21, включаемых в электрическую сеть платформы параллельно (см. фиг. 6). Для ограничения чрезмерного разряда аккумуляторов 20 служат транзисторные ключи ТК (см. фиг. 6), которые при падении напряжения на сборке аккумуляторов 20 ниже установленной, отключают их от электрической сети платформы, при этом питание продолжает поступать на стабилизатор напряжения, служащий для питания оптических линий связи и аппаратуры управления. Таким образом, отключение сборки аккумуляторных батарей 20 одного или нескольких модулей не нарушает функционирования электрической системы платформы в целом, и позволяет поддерживать функционирование оптических линий связи и аппаратуры управления вплоть до полного разряда всех аккумуляторов. Для зарядки аккумуляторов служит контроллер заряда 21, позволяющий заряжать аккумуляторы из одной сборки до заданного напряжения.
Электропитание от параллельно подсоединенных модулей подается на регулятор хода 15, управляемый по оптическим линиям связи комбинированного разъема 7. Регулятор хода вырабатывает напряжение для управления частотой и направлением вращения электродвигателей 16, приводящих в движение гребные винты 18 через валы 17, а система управления - управляющий сигнал для привода руля 19. Такая система электропитания позволяет максимально использовать имеющиеся энергетические ресурсы платформы и предохранять аккумуляторные батареи от переразряда.
Оптические линии связи функционируют следующим образом. Напряжение питания поступает от стабилизатора напряжения (см. фиг. 6) для каждого модуля в отдельности. Передаваемая информация кодируется генератором ШИМ-сигнала и подается в виде широтно-модулированных импульсов на светодиод (HL на фиг. 7), находящийся в канале 40 корпуса 32 комбинированного разъема 7. В ответном канале оптической линии связи находится фотодиод (VD на фиг. 7). При попадании света на фотоэлемент его сопротивление резко падает и замыкается цепь - светодиод в этой цепи начинает светиться и передает импульс такой же длительности дальше, и так продолжается до модуля без светодиода с фотодиодом и приемником ШИМ-сигнала. Если есть необходимость считывания сигнала на промежуточном звене, то параллельно ограничивающему резистору Rогр подсоединяется приемник ШИМ-сигнала.
Волноотбойник 8, установленный в модуле 1 служит для защиты средства наблюдения 11 от забрызгивания, вызываемого встречным волнением.
Площадка 9, установленная на надстройке 10, снабжена крепежными элементами для различного оборудования, например, средств наблюдения 11 (видеокамера с приводами наведения). Антенна 14 для обеспечения радиосвязи с платформой, закреплена на мачте 13, которая имеет возможность может заваливаться, поворачиваясь на кронштейне 12 с помощью, например, сервопривода.
Управление платформой может быть как автономным - по заранее заложенному заданию, так и ручным - по радиоканалу телеуправления.
Таким образом, благодаря особенностям выполнения универсальной безэкипажной надводной модульной платформы сверхмалого водоизмещения изобретение обеспечивает универсальность применения, простоту изготовления, быструю сборку платформы из готовых к работе отдельных модулей, а при необходимости обеспечивает быструю замену модулей, имеющих повреждения. Кроме того, применение 3D печати методом FDM (послойного наплавления пластика) позволяет наладить производство корпусных конструкций на слабо оборудованных в технологическом отношении площадках и подразумевает сравнительно малое участие человека (главным образом для сборки отдельных модулей из напечатанных блоков и поставляемых комплектующих согласно конструкции модуля). Вместе с этим, благодаря модульному построению, платформа позволяет формировать разные по своему назначению безэкипажные платформы с разным количеством корпусов (катамаран, тримаран) различных габаритов и водоизмещения на основе постоянных и дополнительных модулей, при этом сохраняя вес каждого модуля в пределах, доступных для переноски отдельным человеком. Вышеотмеченное позволяет значительно расширить эксплуатационные возможности универсальной безэкипажной платформы.
Совокупность существенных признаков заявляемой платформы обеспечит достижение поставленной цели. Авторам неизвестны технические решения из области безэкипажных катеров, содержащие признаки, эквивалентные отличительным признакам заявляемой платформы. Авторам неизвестны технические решения из других областей техники, обладающие свойствами заявляемых технических решений. Таким образом, заявляемые технические решения, по мнению авторов, обладают критериями существенных признаков.
| название | год | авторы | номер документа |
|---|---|---|---|
| Сторожевой корабль | 2024 |
|
RU2834069C1 |
| Безэкипажный катер - носитель сменной полезной нагрузки | 2021 |
|
RU2760797C1 |
| Пост наблюдения на базе привязного беспилотного летательного аппарата | 2023 |
|
RU2807768C1 |
| Спускоподъемное устройство для малогабаритных необитаемых подводных аппаратов и опускаемых гидроакустических антенн с судна-носителя | 2021 |
|
RU2760798C1 |
| РОБОТОТЕХНИЧЕСКИЙ РАЗВЕДЫВАТЕЛЬНЫЙ КОМПЛЕКС АМФИБИЙНЫЙ | 2017 |
|
RU2654898C1 |
| Способ освещения подводной обстановки и нейтрализации обнаруженных объектов | 2022 |
|
RU2789185C1 |
| ВОДОЛАЗНЫЙ ПОЛУКОЛОКОЛ УПРОЩЕННОЙ КОНСТРУКЦИИ | 2022 |
|
RU2788465C1 |
| САМОХОДНАЯ ПОЛУПОГРУЖНАЯ ОКЕАНОЛОГИЧЕСКАЯ ИССЛЕДОВАТЕЛЬСКАЯ ПЛАТФОРМА И СПОСОБ ЕЕ ИСПОЛЬЗОВАНИЯ | 2006 |
|
RU2343084C2 |
| Планарный корпус корабля, предназначенный для размещения функциональных комплексов авианесущего или транспортно-десантного корабля | 2021 |
|
RU2770817C1 |
| Оптико-электронная система преобразования данных изображения в элементы вектора состояния судна | 2023 |
|
RU2808873C1 |
Изобретение относится к безэкипажным катерам, а именно к безэкипажным катерам малого/сверхмалого водоизмещения модульной конструкции, собираемых из предварительно изготовленных секций. Универсальная безэкипажная надводная модульная платформа сверхмалого водоизмещения, содержащая постоянные и сменные модули, оборудованные сборками аккумуляторных батарей с контроллерами зарядки, аппаратурой управления, приемником сигналов, электродвигателями, взаимодействующими с гребными винтами и надстройкой со средствами наблюдения. Каждый модуль снабжен не менее чем одним комплектом фиксаторов, комбинированным разъемом, с оптическим каналом передачи информации и подпружиненными контактами. Один из модулей содержит мачту с антенной, причем фиксатор содержит стакан с каналом для бобышки и крышкой с эллипсоидным отверстием на верхней части стакана для взаимодействия с эллипсоидной головкой. Головка в нижней части закреплена с осью, на которой имеется пружина для взаимодействия с отверстиями на бобышке. Достигается обеспечение возможности производства платформы на технологически слабо оборудованных площадках; возможность ремонта отдельных узлов модуля в корабельных/полевых условиях, а в случае серьезных повреждений модуля его быстрая замена на исправный; обеспечение гибкого подхода к формированию облика платформы; простота интеграции новых модулей в конструкцию с уже существующими модулями. 3 з.п. ф-лы, 7 ил.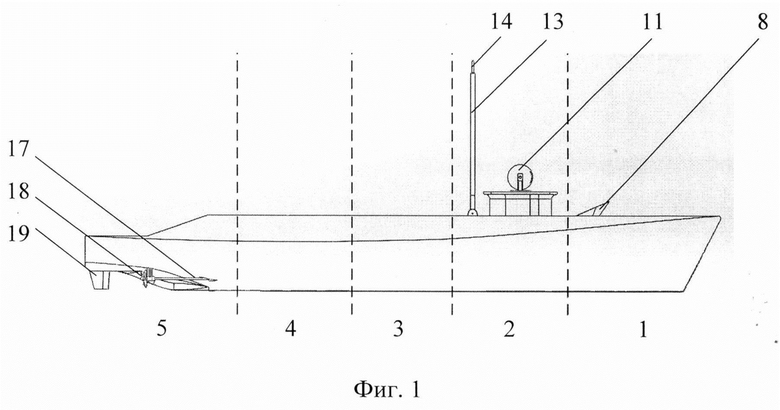
1. Универсальная безэкипажная надводная модульная платформа сверхмалого водоизмещения, содержащая постоянные и сменные модули, оборудованные сборками аккумуляторных батарей с контроллерами зарядки, аппаратурой управления, приемником сигналов, электродвигателями, взаимодействующими с гребными винтами, надстройкой со средствами наблюдения, отличающаяся тем, что каждый модуль снабжен не менее чем одним комплектом фиксаторов, комбинированным разъемом, с оптическим каналом передачи информации и подпружиненными контактами, один из модулей содержит мачту с антенной, причем фиксатор содержит стакан с каналом для бобышки и крышкой с эллипсоидным отверстием на верхней части стакана для взаимодействия с эллипсоидной головкой, причем головка в нижней части закреплена с осью, на которой имеется пружина для взаимодействия с отверстиями на бобышке.
2. Универсальная безэкипажная надводная модульная платформа сверхмалого водоизмещения по п.1, отличающаяся тем, что мачта выполнена складной.
3. Универсальная безэкипажная надводная модульная платформа сверхмалого водоизмещения по п.1, отличающаяся тем, что комбинированный разъем содержит корпус с размещенными внутри него обоймой и подпружиненными контактами, уплотнительной прокладкой.
4. Универсальная безэкипажная надводная модульная платформа сверхмалого водоизмещения по п.3, отличающаяся тем, что корпус содержит каналы оптической линии связи с защитными оптическими элементами для возможности размещения в каждом из них светодиода или фотодиода.
| 0 |
|
SU156830A1 | |
| ПРИВОДНОЕ УСТРОЙСТВО ЛЕНТОЧНОГО КОНВЕЙЕРА | 1967 |
|
SU215787A1 |
| CN 203780755 U, 20.08.2014 | |||
| САМОХОДНАЯ ПОЛУПОГРУЖНАЯ ОКЕАНОЛОГИЧЕСКАЯ ИССЛЕДОВАТЕЛЬСКАЯ ПЛАТФОРМА И СПОСОБ ЕЕ ИСПОЛЬЗОВАНИЯ | 2006 |
|
RU2343084C2 |
| ПЛУНЖЕР СОСТАВНОЙ | 0 |
|
SU204067A1 |

