Изобретение относится к области морской авиации, в частности к конструкциям привязных беспилотных летательных аппаратов (БПЛА) вертолетного типа (мультикоптеров), расположенных на безэкипажных катерах (БЭК).
В настоящее время БЭК специального назначения заняли прочное место во флотах развитых стран. Одним из перспективных направлений мирового развития БЭК является их оснащение разнообразными дистанционно-управляемыми модулями (ДУМ), определяющими их назначение, это: ДУМ стрелкового оружия; ДУМ ракетного оружия; ДУМ посадочной площадки для БПЛА и т. п. В частности БЭК также могут быть носителями ДУМ радиоэлектронной разведки (РЭР). Для решения многих задач РЭР одним из способов расширения радиогоризонта для антенн-пеленгаторов является их подъем на требуемую высоту при помощи подъемно-мачтовых устройств (ПМУ). Однако в ряде случаев это просто не возможно технически реализовать: например, мачты высотой 30 м может быть достаточно для эффективной РЭР на дальности 20–30 км, но для увеличения дальности до 30–50 км необходима уже мачта высотой 100 м, длина которой выходит за пределы удобства размещения на мобильной технике. Дальнейший рост дальности радиогоризонта до 70 км требует подъема антенн на высоту до 300 м (см. «БПЛА «Грач». Инициатива, вдохновение, кооперация – результат»). Размещение высоких ПМУ на БЭК может привести к существенному уменьшению их остойчивости, что на волнении при плохой погоде может иметь фатальные последствия. Очевидным решением повышения дальности и скрытности разведки комплексами РЭР, становится подъем антенн РЭР в воздух не посредством ПМУ, а при помощи привязных БПЛА вертолетного типа.
Известен первый в Мире БЭК «Marlin Sida», оснащенный аппаратурой РЭР, характеристики которой не уточняются (см. «Marlin Sida»: первый беспилотный военный катер с функциями РЭБ»). Проект реализован в Турецкой республике усилиями компании ASEL-SAN и судостроительной верфи Sefine Shipyard. БЭК длиной 15 м планируется использовать по назначению, как у побережья, так и в открытом море. Недостатком данной конструкции является небольшая (порядка 3 – 4 м) высота подъема антенн РЭР над уровнем моря, при помощи ПМУ и стационарной стойки, что сильно ограничивает дальность радиогоризонта. Данную конструкцию БЭК принимаем в качестве аналога.
Известно изобретение «Безэкипажный катер – носитель сменной полезной нагрузки» (патент РФ 2760797 заявка: 2021114347, 21.05.2021, опубликовано: 30.11.2021 бюл. № 34). БЭК содержит съемные кормовой и носовой модули сменной полезной нагрузки. На продольной оси БЭК размещены носовой и кормовой универсальные конструктивные узлы крепления модулей сменной полезной нагрузки, каждый из которых содержит универсальный посадочный фланец. В носовой части надстройки корпуса, в его диаметральной плоскости, выполнено отверстие под установку съемных модулей сменной полезной нагрузки. Универсальный посадочный фланец жестко соединен с тумбой, закрепленной на шпангоутах в носовой части корпуса БЭК, под отверстием в надстройке корпуса таким образом, что универсальный посадочный фланец расположен ниже поверхности надстройки. Универсальный посадочный фланец кормового универсального конструктивного узла крепления модулей сменной полезной нагрузки закреплен на жесткой раме, которая расположена на направляющих, закрепленных на палубе. Изобретение расширяет функциональные возможности БЭК и повышает эффективность его использования. Данную конструкцию БЭК принимаем в качестве аналога.
Известен привязной квадрокоптер системы UMAR. Американская компания Dragonfly Pictures Inc. (DPI) разработала БПЛА системы UMAR (Unmanned Multirotor Aerial Relay) – http://factmil.com/_pu/19/09782669.jpgпривязной БПЛА, сохраняющий на ходу неизменное положение относительно судна (см. «Более 400 часов подряд в воздухе – DPI представила привязные БПЛА для использования на кораблях»). БПЛА имеет восемь электродвигателей с воздушными винтами противоположного вращения. При потребляемой мощности базовой станции корабля 8 – 10 кВт квадрокоптер может находиться в воздухе в штормовых условиях. БПЛА обеспечивает увеличение дальности связи корабля с 13 км до 50 км. Особое преимущество БПЛА UMAR заключается в том, что он способны безотказно работать свыше 400 ч в беспосадочном режиме на высоте до 150 м благодаря непрерывной подаче электропитания по кабелю. Недостатком данной конструкции является то, что она глубоко интегрирована в конструкцию судна и не является сменным модулем. Данную конструкцию БЭК принимаем в качестве аналога.
Известна полезная модель «Пост наблюдения на базе привязного беспилотного летательного аппарата» (патент РФ №154874 Заявка: 2014148777/11, 03.12.2014, дата подачи заявки: 03.12.2014, опубликовано: 10.09.2015 бюл. № 25). Полезная модель относится к системам наблюдения за местностью, реализуемых на основе БПЛА. Пост наблюдения содержит наземную станцию и БПЛА. БПЛА связан с наземной станцией привязью, состоящей из четырех одинаковых тросов, а также многофункциональным кабелем. На земле тросы могут сматываться и разматываться с помощью четырех барабанных механизмов, расположенных в углах квадратного основания наземной станции. Многофункциональный кабель подсоединен к наземному блоку управления, у которого есть четыре выхода, подключенных к соответствующим управляющим входам барабанных механизмов. При вращении воздушных винтов БПЛА создается вертикальная подъемная сила. Для подъема БПЛА с наземного блока управления на все барабанные механизмы подается сигнал на разматывающее вращение барабанов, что дает возможность разматываться одновременно всем четырем тросам. Техническим результатом является простота стабилизации положения БПЛА и его устойчивость в условиях значительных ветровых нагрузок. Недостатком данной конструкции является то, что она глубоко интегрирована в конструкцию судна и не является сменным модулем. Данную конструкцию БЭК принимаем в качестве прототипа.
Технической задачей заявленного изобретения является создание единого съемного модуля для БЭК, который объединял бы в себе два разных устройства: привязной БПЛА – мультикоптер и его базовую станцию. Модуль должен иметь фланец крепления к посадочному месту БЭК, а также разъем питания и интерфейса информационно-технического взаимодействия с системой управления БЭК. В результате полезная нагрузка (например, антенны РЭР), расположенные на БПЛА могут быть подняты на высоту свыше 100 м благодаря непрерывной подаче электропитания по кабелю и безотказно работать в течение нескольких часов в беспосадочном режиме на ходу катера. Также обеспечивается поддержка канала (шины) Ethernet подключения БПЛА, что позволяет получать на экран пульта управления стабильный видеопоток с камеры БПЛА в режиме HD без сжатия или другие данные. Картинку высокого разрешения не могут обеспечивать БПЛА, передающие видео по радиоканалу. Использование проводов также снижает возможности перехвата данных.
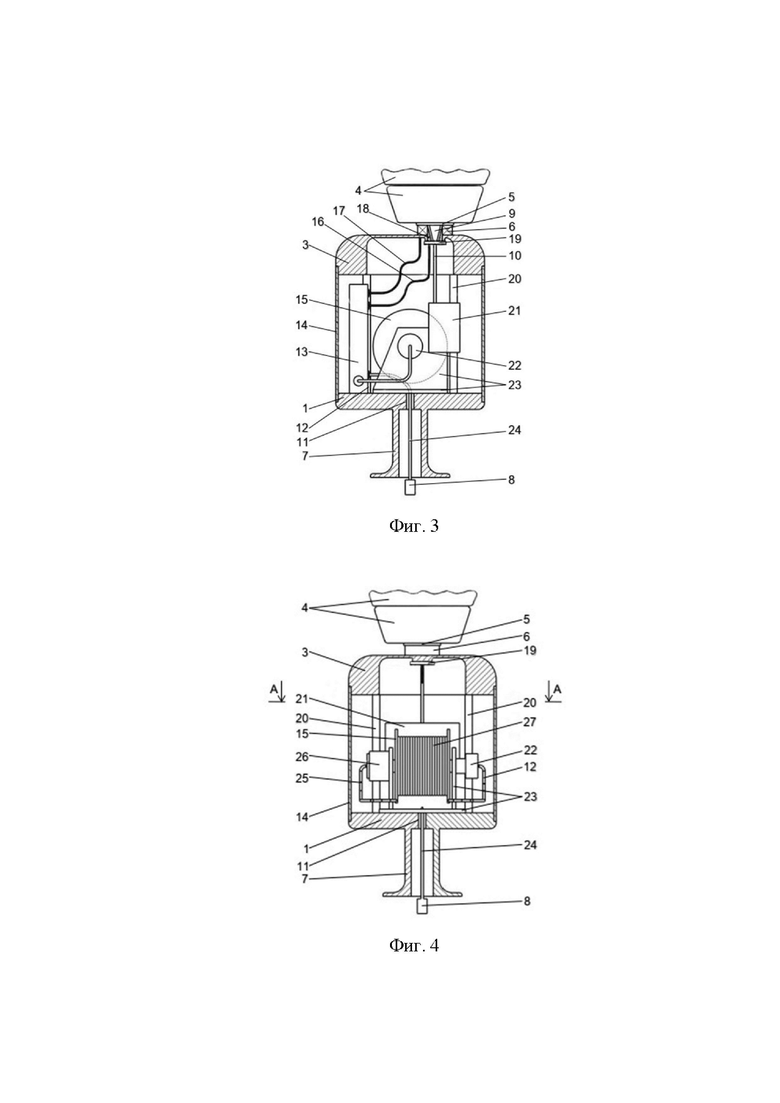
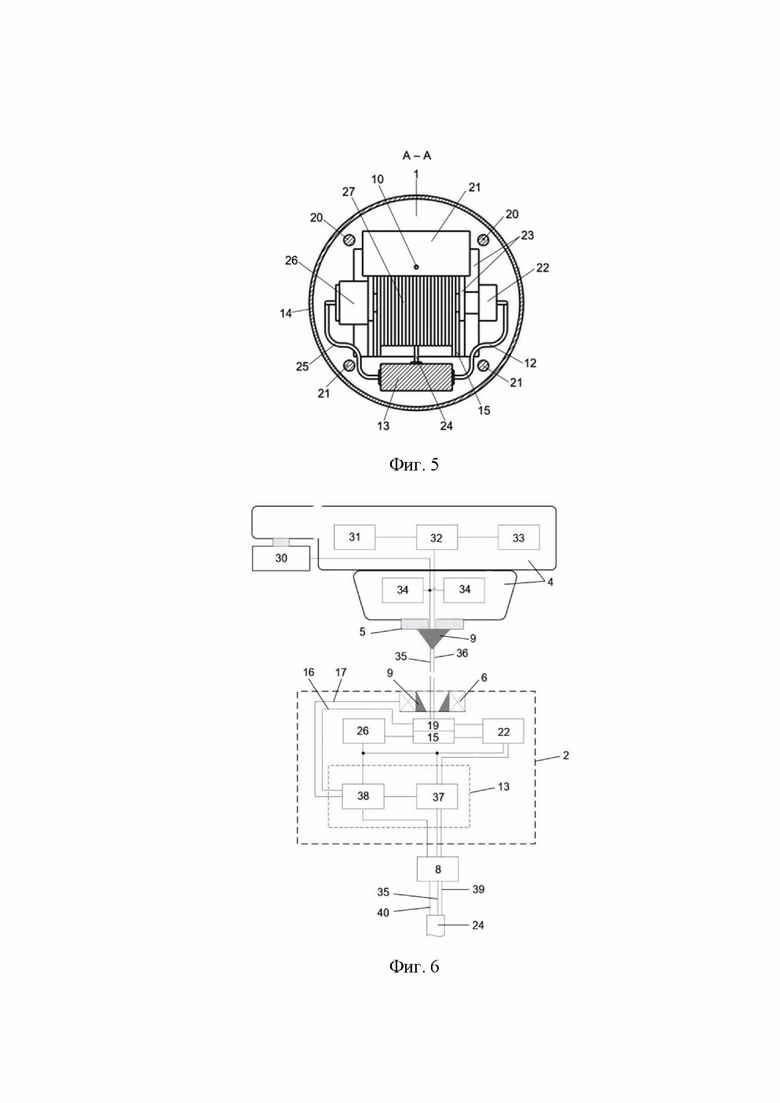
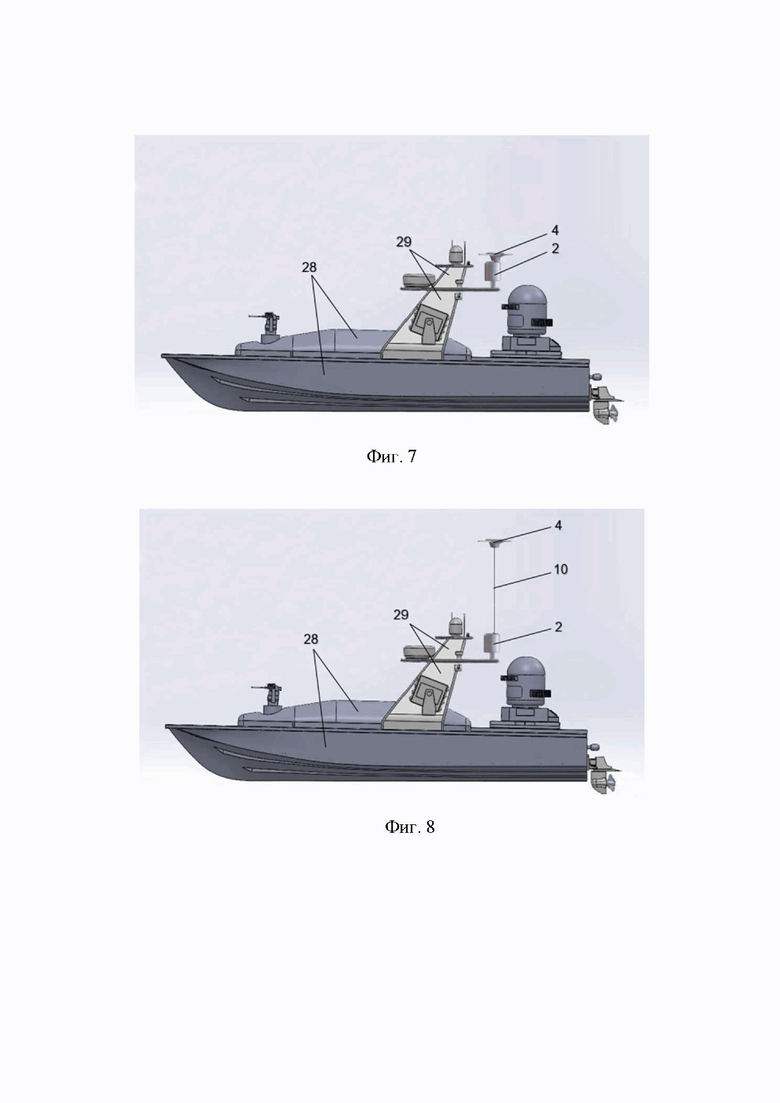
Сущность изобретения поясняется чертежами, где на фиг. 1 показан внешний вид съемного модуля вместе с БПЛА – мультикоптером, закрепленным на базовой станции в положении «по походному». На фиг. 2 показан внешний вид съемного модуля с летящим БПЛА, оторвавшимся от базовой станции. На фиг. 3 показано устройство модуля (вид сбоку). На фиг. 4 показано устройство модуля (вид спереди). На фиг. 5 показано устройство модуля (вид сверху). На фиг. 6 приведена упрощенная блок-схема питания и автоматического управления модулем. На фиг. 7 показано размещение модуля на БЭК с БПЛА, закрепленным «по походному». На фиг. 8 показано размещение модуля на БЭК с летящим БПЛА. На чертежах (фиг. 1 – 8) обозначены:
1 – платформа;
2 – базовая станция;
3 – крышка;
4 – БПЛА (мультикоптер);
5 – якорь БПЛА;
6 – электромагнит;
7 – стойка;
8 – разъем;
9 – посадочный конус;
10 – кабель мультикоптера;
11 – отверстие;
12 – кабель от вращающегося токосъемника к блоку РЭА;
13 – блок РЭА;
14 – оболочка;
15 – барабан;
16 – кабель к резаку;
17 – кабель электромагнита;
18 – коническое гнездо;
19 – резак;
20 – шпилька;
21 – механизмы тросоукладчика и натяжителя кабеля;
22 – вращающийся токосъемник;
23 – лебедка кабельная;
24 – кабель;
25 – кабель мотор-редуктора;
26 – мотор-редуктор;
27 – бухта кабеля;
28 – безэкипажный катер;
29 – мачта безэкипажного катера;
30 – телекамера БПЛА;
31 – блок управления двигателями БПЛА;
32 – DC/DC преобразователь БПЛА (понижающий);
33 – блок управления БПЛА;
34 – антенны РЭР БПЛА;
35 – шина Ethernet БПЛА;
36 – проводники высоковольтного питания БПЛА;
37 – DC/DC преобразователь повышающий;
38 – логический блок;
39 – проводники питания корабельной сети постоянного тока;
40 – шина Ethernet управления модулем.
Съемный модуль привязного БПЛА – мультикоптера состоит из базовой станции 2 и БПЛА – мультикоптера 4, связанных между собой тонким, прочным кабелем 10 (см. фиг 1 и 2). Конструкция базовой станции включает в себя (см. фиг. 3 – 5) стойку 7 с фланцем, при помощи которой весь модуль крепится к мачте 29 БЭК 28. Стойка 7 крепится к платформе 1 на которой монтируется миниатюрная кабельная лебедка 23 и блок 13 радиоэлектронной аппаратуры (РЭА). Лебедка состоит из вращающегося барабана 15, мотор-редуктора 26, механизмов кабелеукладчика и натяжителя 21, а также вращающегося токосъемника 22. На барабан 15 лебедки уложена бухта 27 кабеля 10 мультикоптера.
На платформе 1 установлены четыре шпильки 20 на которых, сверху закреплена крышка 3. Между платформой 1 и крышкой 3 образуется внутренняя полость, которая закрывается от внешних воздействий при помощи оболочки 14, герметично ее закрывающей. К крышке 3 прикреплен кольцевой плоский электромагнит 6, с которым взаимодействует кольцевой якорь 5, прикрепленный к нижней части корпуса БПЛА 4. Кольцевой электромагнит 6 базовой станции 2 имеет про центру коническое гнездо 18, куда может входить посадочный конус 9 принадлежащий БПЛА внутри, которого, проходит кабель 10, жестко заделанный в конус 9. Кабель 10 представляет собой тонкий, усиленный кевларовыми нитями прочный кабель-трос, содержащий две медные жилы питания и витую пару Ethernet (см. «Привязные дроны (дроны с внешним питанием)»).
При помощи разъема 8 и кабеля 24 модуль подключается к системам питания и управления БЭК. Далее кабель 24 подключается к блоку РЭА 13, находящегося внутри базовой станции 2. От блока РЭА 13 кабели питания и управления идут далее: кабель 12 к вращающемуся токосъемнику 22; кабель 25 к мотор-редуктору 26; кабель16 к резаку 19 и кабель 17 к электромагниту 6.
Блок-схема модуля показана на фиг. 6. К базовой станции 2 через разъем 8 подходит кабель 24 содержащий два проводника питания постоянного тока 39 (плюс и минус) от корабельной сети и две «витых пары» шин Ethernet: шина управления модулем 40 и шина управления и передачи данных 35 от БПЛА на систему управления БЭК. Проводники питания корабельной сети подходят к повышающему DC/DC преобразователю 37, предназначенному для повышения первоначального напряжения корабельной сети с целью уменьшения силы тока, подаваемого на проводники питания 36 БПЛА. Часть питания от корабельной сети подается на логический блок 38, блока РЭА 13 от которого запитываются по кабелю 25 мотор-редуктор 26, электромагнит 6 по кабелю 17 и резак 19 по кабелю 16. Далее кабель 12 подается на вращающийся токосъемник 22 и наматывается бухтой 27 на барабан 15 лебедки 23, после чего он соединяется с БПЛА, проходя свободно через отверстие в электромагните 6. Кабель 10 жестко заделан в посадочный конус 9, прикрепленный соосно с якорем 15 и корпусом БПЛА.
Если по каким то разным причинам БПЛА упадет в воду и существует опасность намотать на гребные винты БЭК его кабель 10, последний может быть обрезан при помощи резака 19 с электромагнитным приводом, аналогичным по конструкции с электромагнитной защелкой (патент на полезную модель RU 42254 U1, МПК E05B 47/02(2000.01), опубликованное 27.11.2004 г).
Устройство работает следующим образом. При нахождении БЭК в море (см. фиг. 7) БПЛА 4 прикреплен к базовой станции 2 в положении «по походному» при помощи включенного (работающего) электромагнита 6, фиксирующий якорь 5. При необходимости поднять в воздух БПЛА в положение «боевое» со своей полезной нагрузкой (телекамера и антенны РЭР) по команде оператора БЭК, находящегося на берегу (или корабле) за много миль от катера, его система уп-равления по шине Ethernet 35 дает команды:
- на активацию систем БПЛА и запуск его электромоторов в режиме взлета, при этом высоковольтное питание постоянного тока подается по кабелю 10 (по проводникам 36;
- на снятие питания с электромагнита 6 и освобождения БПЛА для взлета;
- на подачу питания на мотор-редуктор 26 лебедки 23 и вращение ее барабана 15 в режиме травления кабеля 10.
Мотор-редуктор 26 (см. фиг. 3 – 5) начинает вращение барабана 15 лебедки 23, что приводит к вытравливанию кабеля 10, при этом БПЛА с работающими двигателями отрывается от базовой станции и начинает подниматься на заданную высоту. Механизмы 21 кабелеукладчика и натяжителя лебедки 23 при этом равномерно, виток за витком, сматывают кабель 10 в бухте 27 с барабана 15. При этом, поднявшись на заданную высоту, БПЛА занимает положение «по боевому» и продолжает движение со скоростью хода и курсом БЭК (см. фиг. 8) прямо над ним. При этом барабан 15 лебедки 23 стопорится при помощи мотор-редуктора 26. В этом положении оператор БЭК видит обстановку при помощи телекамеры 30 БПЛА с высоты 50 – 150 м, а также принимает сигналы радиоэлектронных средств кораблей и береговых станций противника на антенны 34 РЭР. Информационные потоки от БПЛА скрытно передаются на БЭК по шине 35 Ethernet и далее – оператору БЭК по каналу связи.
При необходимости штатно посадить БПЛА на базовую станцию в положение «по походному», по команде оператора БЭК, его система управления по шине Ethernet 35 дает следующие команды:
- на подачу питания (разблокировку) мотор-редуктора 26 лебедки 23 и начало его вращение в режиме выбирания кабеля 10.
- на некоторое снижение частоты вращения электромоторов БПЛА в режиме посадки;
- на подачу питания на электромагнит 6.
Мотор-редуктор 26 (см. фиг. 3 – 5) начинает вращение барабана 15 лебедки 23, в обратную сторону. Механизмы 21 кабелеукладчика и натяжителя лебедки 23 при этом равномерно, виток за витком, наматывают кабель 10 на барабан 15 в бухту 27, что приводит в итоге к постепенному выбиранию кабеля 10. При этом БПЛА с работающими двигателями приближается к базовой станции 2 до тех пор, пока посадочный конус 9 не войдет в коническое гнездо 18 базовой станции. Далее электромагнит 6 базовой станции 2 притягивает якорь 5 и жестко фиксирует БПЛА на базовой станции. При замыкании магнитного потока от электромагнита 6 якорем 5, потребляемый ток в кабеле 17 питания электромагнита скачкообразно уменьшается, что распознается логическим блоком 38, который дает команду на снятие питания с мотор-редуктора 26. В результате БПЛА 4 остается в зафиксированном состоянии на базовой станции 2 в положении «по походному» (см. фиг. 7).
На основании изложенного можно заключить, что совокупность существенных признаков заявленного изобретения имеет причинно-следственную связь с достижимым техническим результатом, т. е. благодаря данной совокупности существенных признаков изобретения стало возможным решение поставленной задачи. Следовательно, заявленное изобретение является новым, обладает изобретательским уровнем и пригодно к использованию. Техническая задача заявленного изобретения, т. е. создание единого съемного модуля для БЭК, который объединял бы в себе два разных устройства: привязной БПЛА – мультикоптер и его базовую станцию считается выполненной.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматической намотки-размотки кабеля привязных БПЛА | 2023 |
|
RU2819974C1 |
| Спускоподъемное устройство для малогабаритных необитаемых подводных аппаратов и опускаемых гидроакустических антенн с судна-носителя | 2021 |
|
RU2760798C1 |
| Способ лазерной имитации стрельбы при обучении стрельбе | 2024 |
|
RU2839564C1 |
| Автоматическое якорное устройство для безэкипажного катера | 2022 |
|
RU2777140C1 |
| Беспилотный привязной авиационный комплекс для внесения пестицидов и агрохимикатов в точном земледелии | 2020 |
|
RU2769411C1 |
| Способ освещения подводной обстановки и нейтрализации обнаруженных объектов | 2022 |
|
RU2789185C1 |
| Корабельный динамический аэропричал для мультикоптеров | 2023 |
|
RU2828127C1 |
| Система посадки беспилотного летательного аппарата вертикального взлета и посадки | 2017 |
|
RU2666975C1 |
| Автоматизированный береговой пост управления безэкипажным катером | 2024 |
|
RU2828729C1 |
| Способ применения БПЛА и система осуществления способа | 2023 |
|
RU2828920C1 |

Пост наблюдения на базе привязного беспилотного летательного аппарата (БПЛА) содержит наземную (базовую) станцию, БПЛА вертикального взлета и посадки, соединенный с наземной станцией гибким тросом с кабелем. Наземная станция выполнена в виде отдельного съемного модуля, образованного платформой, оболочкой и верхней крышкой, соединенными с помощью четырех шпилек. Внутри расположен барабан с кабелем, механизмы тросоукладчика и натяжителя кабеля, мотор-редуктор, вращающийся токосъемник, разъем для подключения к системам питания и управления безэкипажного катера, блок радиоэлектронной аппаратуры (РЭА) с повышающим DC/DC преобразователем и логическим блоком, при этом в верхней крышке расположен электромагнит для удерживания БПЛА, а также резак для экстренного отделения БПЛА. БПЛА содержит блок управления, блок управления двигателями, DC/DC понижающий преобразователь. Снаружи БПЛА прикреплены телекамера, антенны, якорь с посадочным конусом для крепления к наземной станции. Обеспечивается увеличение дальности наблюдения с борта безэкипажного катера. 2 з.п. ф-лы, 8 ил.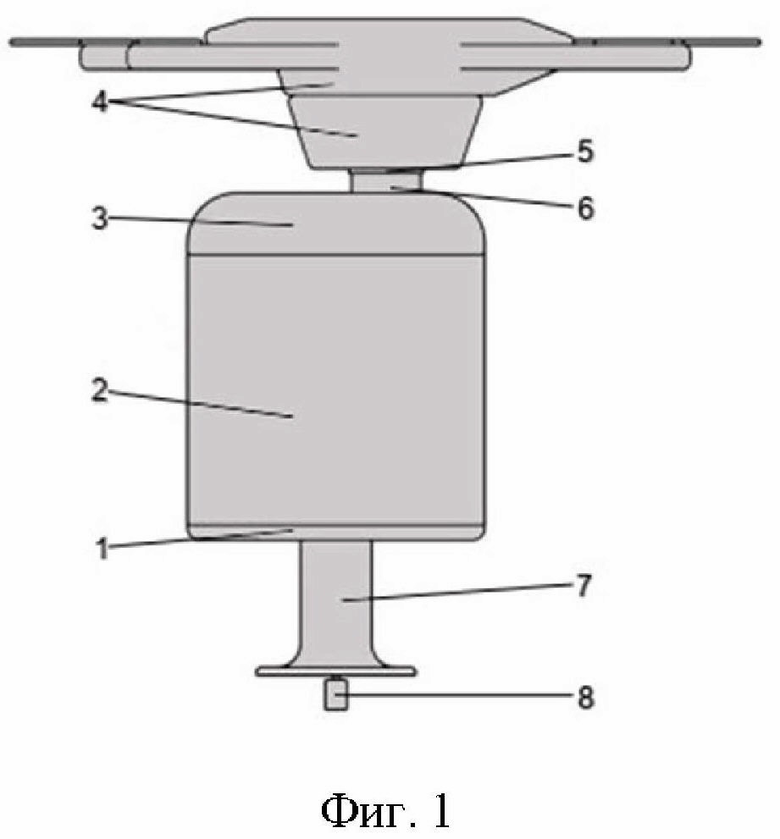
1. Пост наблюдения на базе привязного беспилотного летательного аппарата (БПЛА), содержащий наземную (базовую) станцию, БПЛА вертикального взлета и посадки, привязь, механизм регулирования длины привязи, многофункциональный кабель, систему стабилизации БПЛА и наземного блока управления, при этом БПЛА соединен многофункциональным кабелем с наземным блоком управления, отличающийся тем, что базовая станция и БПЛА выполнены в виде отдельного, съемного, модуля, устанавливаемого на мачте безэкипажного катера (БЭК), при этом в походном положении БПЛА жестко фиксируется на базовой станции при помощи ферромагнитного якоря, прикрепленного к БПЛА и работающего от электромагнита, прикрепленного к базовой станции, а в рабочем положении электромагнит отключается и БПЛА может подниматься на кабеле на заданную высоту и двигаться вместе с БЭК, точная стыковка якоря БПЛА и электромагнита базовой станции достигается при помощи посадочного конуса, куда жестко заделан кабель БПЛА, соосно входящий в отверстие конического гнезда электромагнита базовой станции.
2. Пост наблюдения на базе привязного БПЛА по п. 1, отличающийся тем, что внутри базовой станции компактно размещается дистанционно-управляемая лебедка, на барабане которой намотан кабель питания БПЛА и аппаратура управления модулем.
3. Пост наблюдения на базе привязного БПЛА по п. 1, отличающийся тем, что внутри базовой станции находится дистанционно-управляемый механизм резака, который может перерезать кабель, соединяющий БПЛА и базовую станцию, в случае несанкционированного падения БПЛА в воду и при угрозе намотки кабеля на винты БЭК.
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ПРИВЯЗНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И БЕСПИЛОТНЫЙ АВИАЦИОННЫЙ КОМПЛЕКС | 2009 |
|
RU2441809C2 |
| СИСТЕМА ВОЗДУШНОГО НАБЛЮДЕНИЯ | 2010 |
|
RU2428355C1 |
| 0 |
|
SU154874A1 | |
| Беспилотный привязной авиационный комплекс для внесения пестицидов и агрохимикатов в точном земледелии | 2020 |
|
RU2769411C1 |
| WO 2019226917 A1, 28.11.2019 | |||
| US 20180237161 A1, 23.08.2018. | |||

