Изобретение относится к измерительной технике и может быть использовано для бесконтактного контроля дефектов магистральных трубопроводов нефти и газа с использованием беспилотных летательных аппаратов.
Широко известны, используемые на практике на практике внутритрубные дефектоскопы, основанные на использовании ультразвуковых и магнитных методов наблюдения дефектов стенок трубопроводов при перемещении прибора в потоке внутритрубного продукта. Например, устройство внутритрубного дефектоскопа [RU № 161019, опубл. 10.04.2016], многосекционный внутренний магнитный дефектоскоп [RU № 117186, опубл. 20.06.2012].
Основным недостатком представленных дефектоскопов является низкая скорость обследования трубопроводов, небольшая длина обследования и необходимости вмешательства в процесс перекачки продукта.
Известные дефектоскопы наружного контроля, такие как: автономный магнитный дефектоскоп наружного контроля трубопроводов, содержащий магнитно-поисковую систему и устройство беспроводной связи [RU № 75750, опубл. 20.08.2008].
Однако, как и внутритрубные дефектоскопы, они требуют участие человека-оператора для установки дефектоскопа, наблюдения результатов и требует контакта с поверхностью трубопровода.
Проблематично использование подобных устройств для контроля трубопроводов под слоем Земли или водоеме.
Известен мобильный георадар для дистанционного поиска подземных магистральных коммуникаций и определения их поперечного размера и глубины залегания в грунте [RU № 2256941, опубл. 16.06.2004], содержащий радиолокатор с видео-импульсным излучателем сигналов, монтируемый на беспилотном летательном аппарате.
Однако этот георадар из-за низкой чувствительности не предназначен для регистрации дефектов трубы.
Целью настоящего изобретения является создание бесконтактного дефектоскопа, обеспечивающего высокую скорость контроля и полную автоматизацию измерений.
Техническим результатом является повышение скорости контроля, автоматизация измерений и снижение трудоемкости.
1. Бесконтактный дефектоскоп трубопроводов, размещенный на беспилотном летательном аппарате самолетного типа, содержащий два измерительных канала, один из которых высокочастотный, второй – низкочастотный, выходы обоих каналов подсоединены через микроконтроллер к устройству флэш-памяти, отличающийся тем, что высокочастотный измерительный канал содержит индукционный излучатель, соединенный с генератором высокой частотой и два индукционных магнитоприемника, симметрично размещенных относительно излучателя в ортогональной плоскости, выходы которых подсоединены через фазовые детекторы к полосовым фильтрам настроенных на частоты вибрации дефекта трубы, а выходы которых подсоединены к сумматору сигналов, подключенному к перемножителю низкочастотного канала, вторые выходы высокочастотного канала подключены через перемножитель и интегратор к микроконтроллеру, содержащему логическую схему совпадения тепа «И» объеденяющему результаты регистрации сигналов обеих каналов;
2. Дефектоскоп по п.1, отличается тем, что низкочастотный измерительный канал содержит индукционный приемник, настроенный на частоту вибрации, который через усилитель и полосовой фильтр подсоединен к одному из входов перемножателя, а второй вход – к сумматору выходных сигналов высокочастотного канала, выход перемножателя подсоединён через интегратор к микроконтроллеру, записывающему во флэш-память коэффициент взаимной корреляции сигналов обеих каналов.
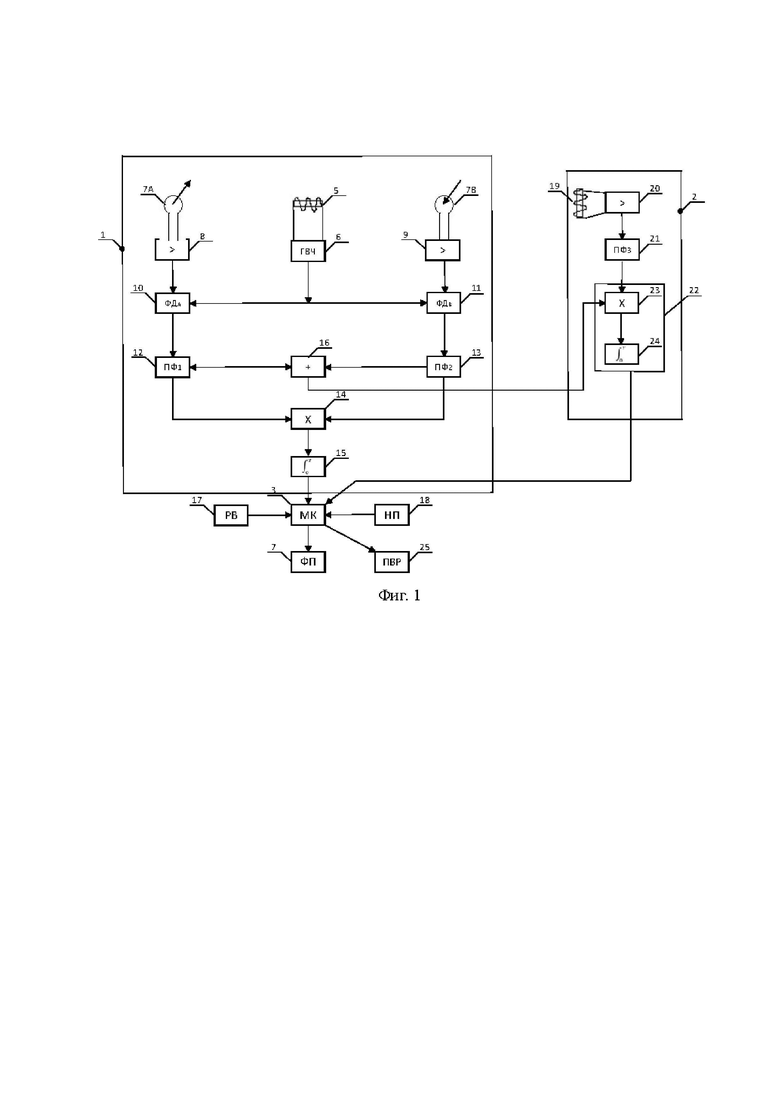
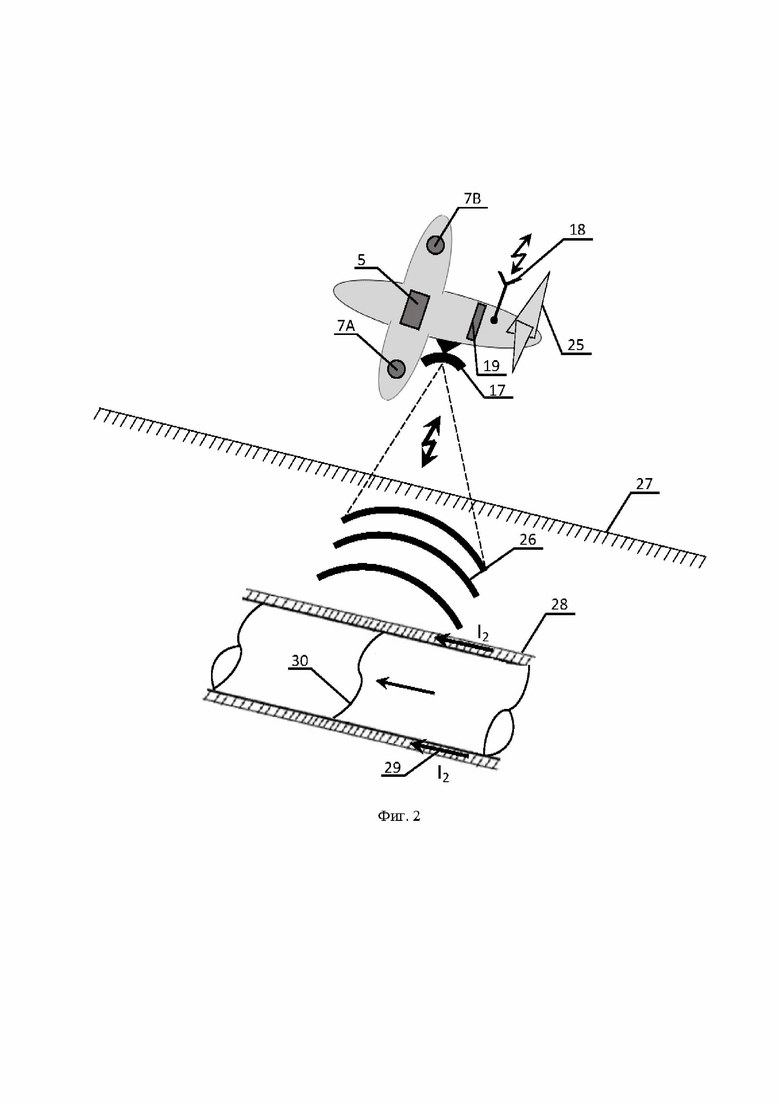
Изобретение поясняется чертежами. На фиг. 1 приведена структурная схема дефектоскопа. На фиг. 2 показана схема размещения дефектоскопа на БПЛА.
Бесконтактный дефектоскоп трубопроводов содержит высокоточный измерительный канал (ВИК) (1) и низкочастотный измерительный канал (2) подключенные через микроконтроллер (3) к схеме флэш-памяти (7), при этом ВИК состоит из индукционного излучателя (5) подсоединенного к генератору высокой частоты (ГВЧ) (6) и левый и правый индукционные магнито-приемники 7А и 7В подключенные через усилители (8, 9) к фазовым детекторам (10, 11), опорные входы, которых подсоединены к ГВЧ (6), а выходы к полосовым фильтрам (12, 13) настроенным на частоту вибрации дефекта трубы, полосовые фильтры подключены через перемножитель сигналов (14) ко входу интегратора (15) подсоединённого через микроконтроллер (3) к схеме флэш памяти (7), выходы полосовых фильтров (12, 13) подключены также к сумматору вибрационных сигналов (16), выход которого подсоединён к перемножителю (23). Низкочастотный измерительный канал (2), содержит магнитоприемник (19) сигналов вибрации трубы, который через усилитель (20) и полосовой фильтр (21) подсоединён к коррелятору (22) состоящему из перемножителя сигналов (23) и интегратора (24) подсоединённого к микроконтроллеру (3), сигналы магнитоприемников левого и правого борта 7А и 7В поступают через микроконтроллер (3) к рулевым машинкам привода вертикальных рулей БПЛА (25). Радиовысотомер (17), навигационный приемник (18) расположены на БПЛА. Радиовысотомер регистрирует поле вибраций (26). Под поверхностью земли (27) расположен трубопровод (28) с дефектом (30). В трубопроводе возникает наведенный ток от ГВЧ (29).
Бесконтактный дефектоскоп трубопроводов работает следующим образом: излучатель (5, 6) высокочастотного канала генерирует электромагнитное поле в диапазоне частот 1÷10мГц, которое наводит на трубопроводе вихревой переменный ток. При наличии вибрации в районе дефекта модулируется фаза этого тела по закону:
I2(t)=Im(wt+ϕm sinS2Zt) (1)
Где: w= 2πƒ – радиальная несущая частоту излучаемого магнитного поля от генератора (5)
S2Z = 2πF – частота вибрации
Магнитное поле этого тока наводит в приемных датчиках (7А и 7В) ЭДС, которое после усиления в усилителях (8, 9) поступает на фазовые детекторы (10, 11).
С помощью полосовых фильтров (12, 13) выделяются сигналы частоты вибрации. При этом фаза сигналов вибрации левого и правого приемных датчиков будут сдвинуты на 180° поскольку вторичное магнитное поле тока I2 имеет противоположную направленность. В этом случае приемные датчики отмечают линию положения трубопровода. Сдвиг БПЛА в лево или вправо отмечается уровнем сигналов на выходе приемных датчиков.
Для снижения влияния первичного поля излучателя приемные датчики монтируются по концам крыльев БПЛА.С приемом электромагнитного поля вертикальной плоскости. При этом магнитный излучатель располагается в центре фюзеляжа в горизонтальной плоскости перпендикулярно линии полёта.
Коэффициент модуляции фазы вибрации дефекта определяется как
Так при 
Известно, что при малом фазовом сдвиге коэффициент модуляции фаза соответствует амплитудной модуляции:
Так что

Напряженность первичного магнитного в районе поверхности трубы определим, как:
h1 – высота полета
h2 – глубина залегания трубы
Rr – радиус излучателя
В этом случае наведенная ЭДС в стенках трубы может вычислить как:

Здесь  – магнитная проницаемость воздуха
– магнитная проницаемость воздуха
SВ – эффективная площадь кольца вихревого тока.
Вторичное магнитное поле в районе магнитоприемника от наведенного в трубе тока I2(t) можно вычислить приближённо через формулу магнитного диполя без учета поглощения

ЭДС, наведенную этим полям в приемные датчики можно определить, как:

Здесь SП – эффективная площадь приемного датчика
ρT- удельное сопротивление металлической трубы
L = 4RT– длина участка вибрирующей поверхности трубы
Объединяя формулы (5 и 10), получим: системную формулу, для оценки уровня сигнала U3 в приемном датчике
При следующих параметрах
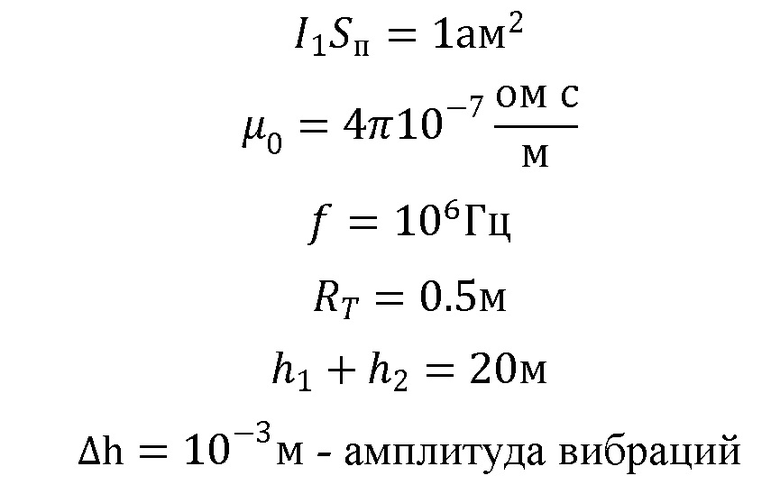
Из (11) получим U3= 0.3 мкв
Практически для частоты 1 мГц реально можно получить I1SП = 10 ам2, что даст уровень амплитуды сигнала U3= 0.3 мкв.
При использовании аналого-цифрового преобразования с порогом чувствительности 0.1 мкв подобный дефектоскоп может регистрировать амплитуду вибрации труб порядка 0.1 мм.
Чувствительность низкочастотного измерительного канала определяется вторичным переменным магнитным полем вызванным вибрацией трубы в соответственном магнитном поле Земли H0
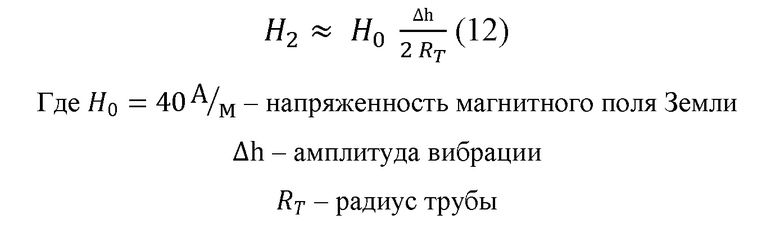
В этом случае, амплитуда сигнала на выходе приемного датчика с эффективной площадью SП = 1 м2 с излучателем соответствующим магнитному диполю радиусом RT = 0.5 м при частоте вибрации 10 кГц оценивается как:
На низких частотах реально использовать SП = 100 м2, что обеспечивает на входе приемника U3= 2 мкв.
Одновременное использование двух независимых каналов контроля повышает вероятность обнаружение дефекта и чувствительность к малым дефектам.
Ожидаемая масса аппаратного комплекса дефектоскопа до 5 кг
Высота полета БПЛА – до 20м;
Дальность – до 300 км.
Основные преимущества перед внутритрубными и поверхностными дефектоскопами:
- Высокая скорость обследования;
- Бесконтактность;
- Работа над земном и водном покрове;
- Низкая стоимость обследования;
- Температура окружающей среды -50 ÷ +40°С.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для дистанционного обнаружения дефектов и мест несанкционированной откачки в магистральных трубопроводах | 2024 |
|
RU2821691C1 |
| Способ дистанционной диагностики магистральных трубопроводов | 2024 |
|
RU2826327C1 |
| Дистанционная система обнаружения несанкционированных врезок в магистральные трубопроводы | 2024 |
|
RU2839501C1 |
| СПОСОБ МУЛЬТИФУНКЦИОНАЛЬНОЙ ДИАГНОСТИКИ ПОДШИПНИКОВЫХ УЗЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ В ИНТЕГРАЛЬНОМ ИСПОЛНЕНИИ | 2019 |
|
RU2728485C1 |
| Система защиты кораблей от подводных дронов | 2024 |
|
RU2832756C1 |
| БЕСКОНТАКТНЫЙ ИЗМЕРИТЕЛЬ ТОКА В ПОДЗЕМНЫХ ТРУБОПРОВОДАХ | 2000 |
|
RU2177630C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДЕФЕКТОВ ТРУБОПРОВОДА И НЕСАНКЦИОНИРОВАННЫХ ВРЕЗОК В ТРУБОПРОВОД И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2572907C2 |
| Способ обнаружения и индивидуального оповещения о беспилотных летательных аппаратах и устройство, его реализующее | 2022 |
|
RU2826436C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ДЕФЕКТОВ ТРУБОПРОВОДА И НЕСАНКЦИОНИРОВАННЫХ ВРЕЗОК В ТРУБОПРОВОД И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2379579C1 |
| УСТРОЙСТВО ДЛЯ ПОИСКА МЕСТ УТЕЧЕК МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ | 2010 |
|
RU2432558C1 |
Изобретение относится к измерительной технике и может быть использовано для бесконтактного контроля дефектов магистральных трубопроводов нефти и газа с использованием беспилотных летательных аппаратов. Техническим результатом является повышение скорости контроля, автоматизация измерений и снижение трудоемкости. Бесконтактный дефектоскоп трубопроводов размещен на беспилотном летательном аппарате самолетного типа и содержит два измерительных канала. Один из измерительных каналов – высокочастотный, второй – низкочастотный. Выходы обоих каналов подсоединены через микроконтроллер к устройству флэш-памяти. Высокочастотный измерительный канал содержит индукционный излучатель, соединенный с генератором высокой частоты и два индукционных магнитоприемника, симметрично размещенных относительно излучателя в ортогональной плоскости, выходы которых подсоединены через фазовые детекторы к полосовым фильтрам настроенных на частоты вибрации дефекта трубы. Выходы полосовых фильтров подсоединены к сумматору сигналов, подключенному к перемножителю низкочастотного канала. Вторые выходы высокочастотного канала подключены через перемножитель и интегратор к микроконтроллеру, содержащему логическую схему совпадения типа «И», объединяющему результаты регистрации сигналов обоих каналов. Низкочастотный измерительный канал содержит индукционный приемник, настроенный на частоту вибрации, который через усилитель и полосовой фильтр подсоединен к одному из входов перемножателя, а второй вход – к сумматору выходных сигналов высокочастотного канала. Выход перемножителя подсоединен через интегратор к микроконтроллеру, записывающему во флэш-память коэффициент взаимной корреляции сигналов обоих каналов. 1 з.п. ф-лы, 2 ил.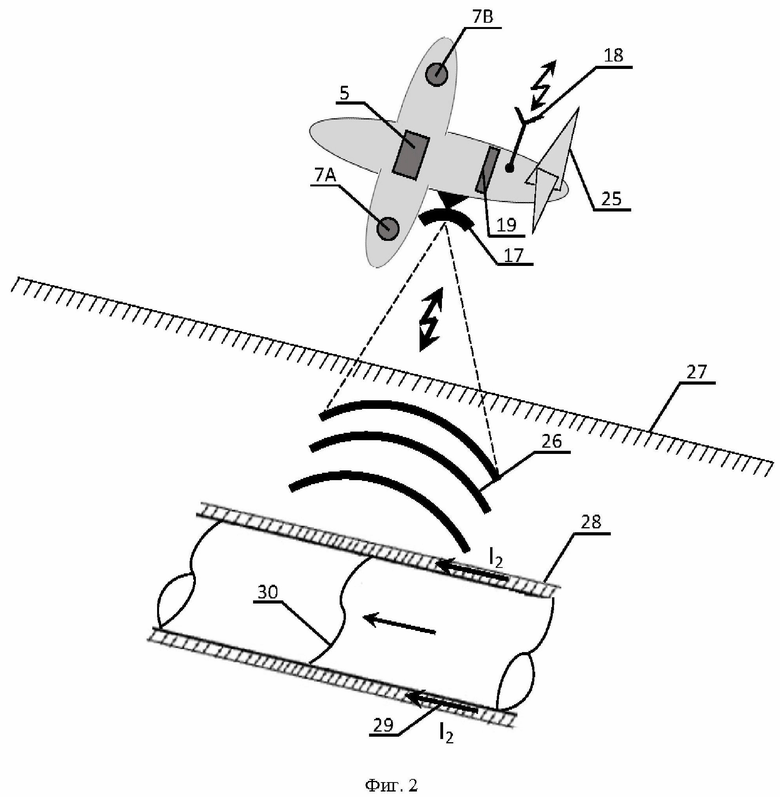
1. Бесконтактный дефектоскоп трубопроводов, размещенный на беспилотном летательном аппарате самолетного типа, содержащий два измерительных канала, один из которых высокочастотный, второй – низкочастотный, выходы обоих каналов подсоединены через микроконтроллер к устройству флэш-памяти, отличающийся тем, что высокочастотный измерительный канал содержит индукционный излучатель, соединенный с генератором высокой частоты, и два индукционных магнитоприемника, симметрично размещенных относительно излучателя в ортогональной плоскости, выходы которых подсоединены через фазовые детекторы к полосовым фильтрам настроенных на частоты вибрации дефекта трубы, выходы которых подсоединены к сумматору сигналов, подключенному к перемножителю низкочастотного канала, вторые выходы высокочастотного канала подключены через перемножитель и интегратор к микроконтроллеру, содержащему логическую схему совпадения типа «И», объединяющему результаты регистрации сигналов обеих каналов.
2. Бесконтактный дефектоскоп трубопроводов по п.1, отличающийся тем, что низкочастотный измерительный канал содержит индукционный приемник, настроенный на частоту вибрации, который через усилитель и полосовой фильтр подсоединен к одному из входов перемножителя, а второй вход – к сумматору выходных сигналов высокочастотного канала, выход перемножителя подсоединён через интегратор к микроконтроллеру, записывающему во флэш-память коэффициент взаимной корреляции сигналов обоих каналов.
| МОБИЛЬНЫЙ ГЕОРАДАР ДЛЯ ДИСТАНЦИОННОГО ПОИСКА МЕСТОПОЛОЖЕНИЯ ПОДЗЕМНЫХ МАГИСТРАЛЬНЫХ КОММУНИКАЦИЙ И ОПРЕДЕЛЕНИЯ ИХ ПОПЕРЕЧНОГО РАЗМЕРА И ГЛУБИНЫ ЗАЛЕГАНИЯ В ГРУНТЕ | 2004 |
|
RU2256941C1 |
| Струйная мельница для тонкого измельчения различных материалов | 1959 |
|
SU138801A1 |
| US 11714189 B2, 01.08.2023 | |||
| US 2001035836 A1, 01.11.2001 | |||
| US 2011037639 A1, 17.02.2011. | |||

