Изобретение относится к областям гидролокации и радиолокации, и может быть использовано для обнаружения, оценки координат и уничтожения морских беспилотных аппаратов дронов (БПА).
Для обнаружения БПА, двигающихся под поверхностью моря на малой глубине, необходимо обеспечить прием отраженных от цели сигналов на фоне волнений моря и турбулентности, создаваемой винтами двигающегося дрона и защищаемого корабля, что не может быть обеспечено традиционными системами гидролокации, и требует разработки специальных средств повышения помехоустойчивости и чувствительности приемника.
Известен гидролокационной способ обнаружения объекта и измерения его параметров [RU № 2674552, опубл. 11.12.2018], заключающийся в излучении зондирующего сложного сигнала, формировании М-опорных сигналов, М-корреляционных вращений между сигналом и каждым из М-опорных сигналов, измерении амплитуды корреляционных функций, и по временному положению корреляционной функции с минимальной амплитудой, определяют дальность до цели.
Недостатком описанного способа является усложнение аппаратной структуры гидролокатора, требующая излучение на нескольких рабочих частотах, входящих в М-канальную структуру.
Известен способ гидролокации в мелководных областях с оперативным контролем изменчивости условий обнаружения подводной цели [RU № 2664869, опубл. 23.08.2018], заключающийся в продольном волновом зондировании водной толщи и приеме отраженного от подводной цели зондирующего сигнала по меньшей мере в двух точках расположенных на разном расстоянии от рассеивающего объекта, и по результатам сравнение энергий принимают решение об обнаружении кильватерного следа при компенсации негативного влияния и присутствующих помех.
Недостатком этого способа является увеличение времени обнаружения цели за счёт необходимости измерения в двух точках её положения.
Известен способ гидролокационного обнаружения высокоскоростного маломерного объекта [RU № 2740158, опубл. 25.05.2020], содержащий излучение в воду дискретной приёмо-излучающей антенной в ненаправленном режиме импульсного зондирующего сигнала, предварительное определение вероятных координат объекта, излучение импульсного зондирующего сигнала в направлении вероятного положения объекта, приеме отраженных эхо-сигналов и использованием допплеровской фильтрации сигналов в начале и конце кильватерного следа, и по этим данным увеличивают дальность и надёжность обнаружения
Поскольку автоматические подводные дроны идут на глубине порядка 10 м, то при небольшой мощности двигателя, его кильватерный слой на поверхности практически не виден. По этой причине отличительные признаки двух приведённых выше аналогов изобретения не дадут ожидаемого эффекта повышения чувствительности гидролокатора, а в случае всплытия БПА и движения по поверхности моря. Возможно рассеивание отраженного акустического сигнала на границе раздела вода-воздух.
По этой причине в заявленный способ введён радиолокационный метод обнаружения и оценки координат БПА.
Известен способ радиолокации [RU № 2797828, опубл. 08.07.2023], заключающийся в излучении и приеме узкополосных сигналов на одну антенну с формированием в направлении излучения равносигнальной зоны путём коммутации диаграммы направленности антенны и путём амплитудной демодуляции выделяют сигналы частоты коммутации, по которым определяют наличие цели в зоне обнаружения.
Этот способ может быть использован на борту корабля, однако только в комплексе с гидролокацией.
Известные способы морской радиолокации с борта надводного судна не обеспечивают надёжность распознавания, двигающегося под поверхностью моря БПА из-за влияния волнения и помех.
Техническим результатом заявленного способа является повышение достоверности обнаружения и распознавания малозаметной цели в виде БПА путём декорреляции помех, вызванных волнением моря и кавитацией воды в кильватерных струях корабля и беспилотного аппарата.
Технический результат достигается тем, что в системе защиты кораблей от подводных дронов, реализующей излучение и прием сигналов, новым является то, что включает установленные на борту корабля комплекс гидролокаторов и радиолокаторов с круговой зоной обзора, обеспечивающих контроль их появления и оценки координат подводных дронов в подводном и надводном положении, при этом комплекс гидролокаторов включает установленные вдоль борта корабля ниже ватерлинии пары приемо-передающих акустических фазированных антенных решеток с электронным сканированием по азимуту в пределах ±30 градусов, по количеству, обеспечивающему круговую зону защиты, передающая решетка которых подсоединена к импульсному генератору акустических колебаний, а приемная подсоединена через переключатель к двум фазовым детекторам, работающим с интервалом в один период излучения передатчика, на выходе фазовых детекторов включены полосовые фильтры сигналов частоты Доплера движущейся цели, подсоединённые через взаимный коррелятор к пороговому устройству распознавания момента появления цели, а комплекс радиолокаторов включает установленные над верхней палубой корабля на мачте 4-6 узкополосных радиолокаторов с коммутацией плоскости поляризации излучаемых волн, каждый из которых обеспечивает сканирование по азимуту своего сектор обзора в пределах 60÷90 градусов, в фокусе зеркала антенн радиолокаторов размещены два ортогональных вибратора, подсоединенных через циркуляторы и переключатель к передатчику, а приемные выходы циркуляторов через амплитудный детектор подсоединены ко второму переключателю, работающему через один период сканирования сектора обзора, подсоединенному к двум полосовым фильтрам, настроенным на частоту коммутации плоскости поляризации, выходы которых подключены через фазовые детекторы к микроконтроллеру, вычисляющему коэффициент взаимной корреляции сигналов частоты Доплера, периодически поступающих через один период сканирования радиолокаторов соответствующего сектора обзора. При этом выход одного из фазовых детекторов радиолокатора через интегратор подсоединен к индикатору измерения расстояния до цели.
Излучение радиолокатора и узкая полоса пропускания приемника обеспечивают скрытность работы и высокую точность измерения дальности на малых расстояниях до цели.
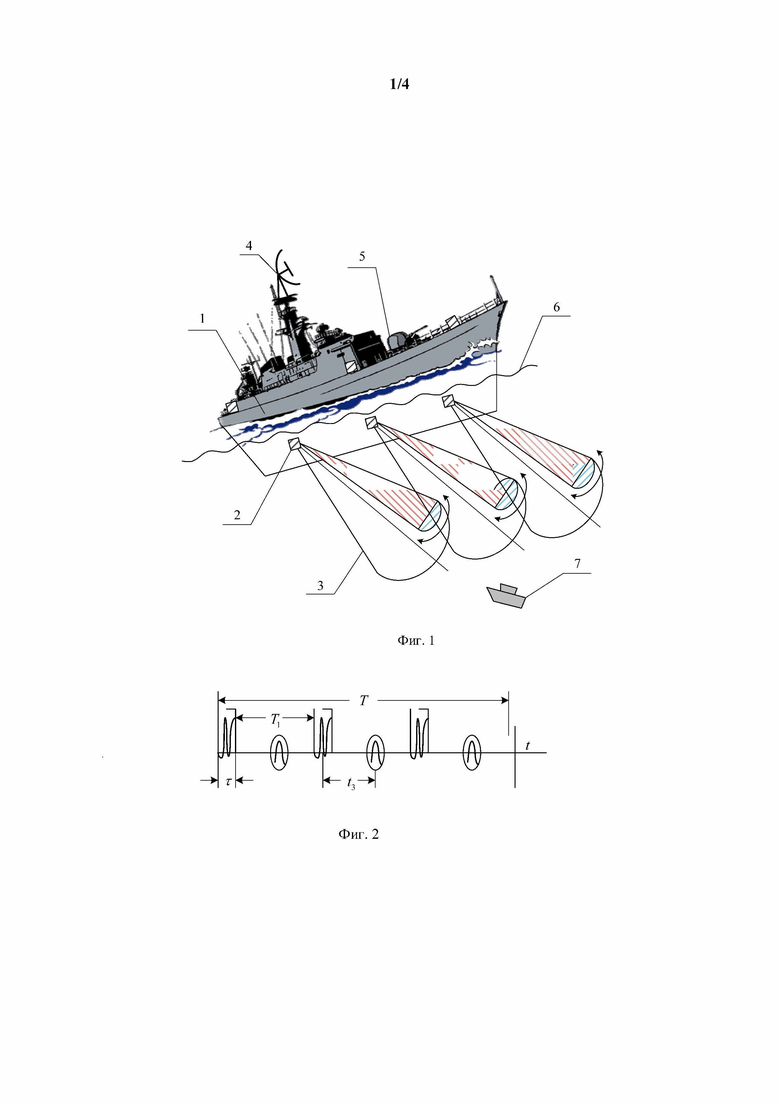
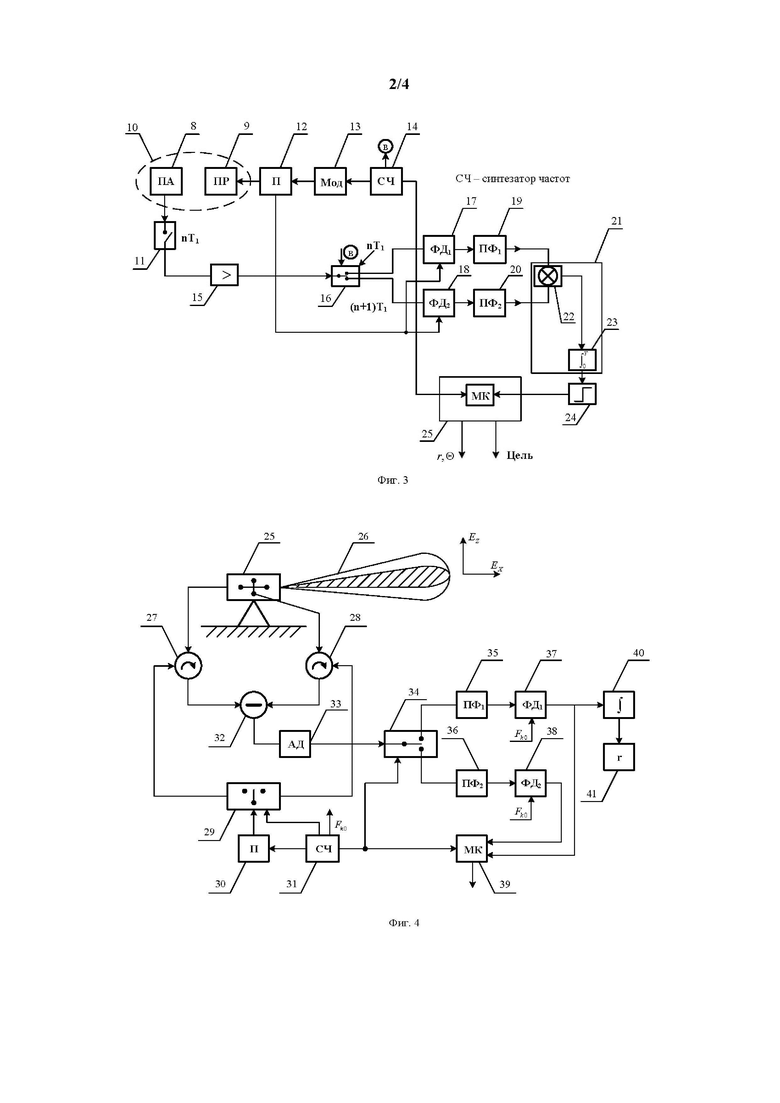
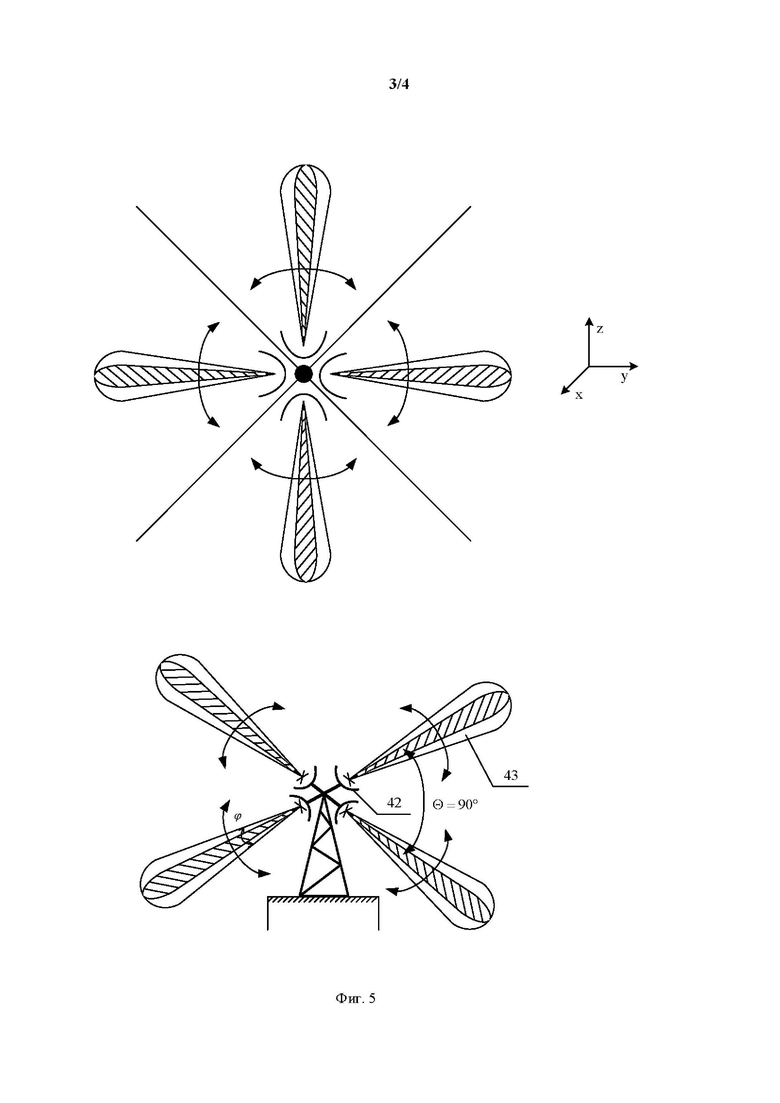
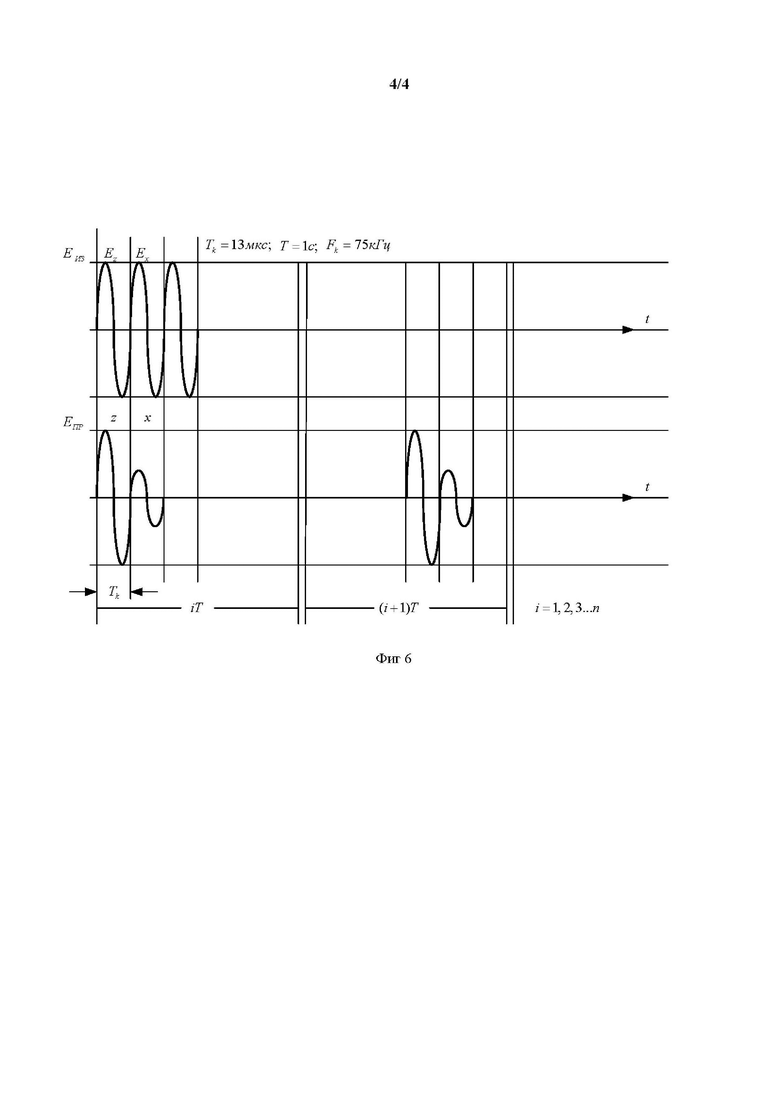
Изобретение поясняется чертежами. На фиг. 1 изображена схема размещения гидролокаторов и РЛС на корабле. На фиг. 2 приведена временная эпюра излучаемых и принимаемых сигналов гидролокаторов (ГДЛ). На фиг. 3 показано структурная схема аппаратной части ГДЛ. На фиг. 4 приведена структурная схема аппаратной части радиолокатора. На фиг. 5 изображена схема установки радиолокаторов на мачте корабля. На фиг. 6 показана временная эпюра излучаемых и принимаемых сигналов РЛС.
Изобретение включает: 1 - корпус корабля; 2 - акустические фазированные решетки ГДЛ (АФАР); 3 - диаграмма направленности АФАР; 4 - место размещения радиолокаторов; 5 - артиллерийское средства уничтожения цели; 6 - поверхность моря; 7 - цель (беспилотной подводный аппарат); 8 - приёмная АФАР; 9 - АФАР передатчика ГДЛ; 10 – защитный экран АФАР; 11 – входной коммутатор приёмника ГДЛ; 12 - передатчик; 13 - амплитудный демодулятор; 14 - синтезатор частот; 15 - усилитель; 16 - коммутатор приёмника; 17, 18 - фазовые детекторы; 19, 20 - полосовые фильтры частот Доплера; 21 - коррелятор; 22 - перемножитель; 23 - интегратор; 24 - пороговый элемент; 25 – микроконтроллер; 25 – антенна с двумя ортогональными вибраторами; 26 - диаграмма направленности; 27, 28 - циркуляторы; 29 – переключатель поляризации; 30 - передатчик; 31 - синтезатор частот; 32 – вычитающая схема; 33 - амплитудный детектор; 34 – переключатель циклов сканирования; 35, 36 - полосовые фильтры частоты коммутации; 37, 38 - фазовые детекторы; 39 – микроконтроллер; 40 – интегратор; 41 – индикатор расстояния; 42 – антенны радиолокаторов; 43 – диаграммы направленности антенны.
Заявленный способ реализуют следующим образом.
При подготовке корабля ниже ватерлинии устанавливают под защитными экранами акустические фазированные решетки (АФАР) с электронным сканированием по азимуту в пределах угла сканирования ±30° так, чтобы перекрыть зону обнаружения на дистанции r=1000 м. При установке вдоль борта корабля трёх гидролокаторов на этой дистанции будет закрыта полоса защиты около 2 км.
На верхней палубе корабля на мачте устанавливают 4-6 узкополосных радиолокаторов с круговой зоной обзора, сканирующих поверхность моря по азимуту угловыми секторами в 60÷90° (фиг. 4). В качестве антенн могут быть использованы фазированные антенные решётки с электронным сканированием.
Выходы антенн ГДЛ и РЛС подсоединяют к приемопередатчикам.
Для излучения акустических волн используют АФАР на пьезоэлементах с электронным сканированием луча и работой в импульсном режиме длительностью импульса  и разрешающей способностью по дальности
и разрешающей способностью по дальности 
При скорости распространения акустических волн  и
и  величина
величина 
Разрешающая способность по азимуту составит
 - эффективная площадь апертуры антенны;
- эффективная площадь апертуры антенны;
 - коэффициент направленности действия антенны
- коэффициент направленности действия антенны
Период повторения импульсов передатчика 
При скорости движения цели 5-10 м/с, это позволяет декоррелировать отраженные от волнения воды акустические сигналы и выделить с помощью вычисления коэффициент взаимной корреляции, сигналы доплеровской частоты движущиеся цели с помощью фазовых детекторов 17, 18 и полосовых фильтров 19, 20.
Функция разделения периодов коммутации выполняют управляемые ключи 8, 11.
Ожидаемая частота спектра допплеровских частот составит:
 где
где
 - рабочая частота гидролокатора
- рабочая частота гидролокатора
 - скорость движения цели
- скорость движения цели
 - скорость распространения акустических волн в морской воде
- скорость распространения акустических волн в морской воде
При 
 полоса допплеровских частот движения БПА составит
полоса допплеровских частот движения БПА составит 
С учётом того, что спектр частот волнения моря и кильватерных струй цели и корабля, не превышает 100÷200 Гц, полосовые фильтры 4, 12 приемников ГДЛ и РЛС позволят синхронизированно выделить допплеровские частоты цели от помех движения и волнений моря, путём вычисления коэффициента взаимной корреляции двух сигналов, принимаемых через каждый период излучения Т1 передатчика ГДЛ.

 (1)
(1)
Таким образом, превышение коэффициента  над порогом
над порогом  решает задачу обнаружения цели.
решает задачу обнаружения цели.
Дадим оценку энергетических параметров ГДЛ и РЛС из расчёта работы на дальность  Требуемую импульсную мощность передатчика ГДЛ получим из уравнения гидролокации:
Требуемую импульсную мощность передатчика ГДЛ получим из уравнения гидролокации:
 (2)
(2)
где 
 - отношение сигнал/шум на входе приёмника;
- отношение сигнал/шум на входе приёмника;
 - постоянная Больцмана;
- постоянная Больцмана;
 - температура шумов;
- температура шумов;
 - эффективная отражающая поверхность цели (ЭПР);
- эффективная отражающая поверхность цели (ЭПР);
 - КПД входной цели;
- КПД входной цели;
 - коэффициент направленности действия АФАР;
- коэффициент направленности действия АФАР;
 - площадь апертуры АФАР;
- площадь апертуры АФАР;
 - длина акустической волны на чистоте работы гидролокатора;
- длина акустической волны на чистоте работы гидролокатора;
 - коэффициент поглощения акустических волн в морской воде;
- коэффициент поглощения акустических волн в морской воде;
 - несущая частота, кГц.
- несущая частота, кГц.
При длительности излучаемого импульса
разрешающая способность ГДЛ по дальности составит 
Требуемая импульсная мощность передатчика гидролокатора для следующих параметров: 


Средняя мощность: 
Отражённый радиосигнал будет модулирован по амплитуде с коэффициентом модуляции по мощности:
 (3)
(3)
Напряжённость электрического поля отражённого сигнала:
 (4)
(4)
где  - частота коммутации;
- частота коммутации;
 - несущая частота РЛС.
- несущая частота РЛС.
 - частота Доплера;
- частота Доплера;
 - скорость цели;
- скорость цели;
 - скорость света.
- скорость света.
После амплитудной демодуляции полосовыми фильтрами 12, 13 в микроконтроллере 16 выделяются сигналы обнаружения цели на частоте доплера путём вычисления коэффициента взаимной корреляции, по двум соседним периодам сканирования поверхности моря.
Устанавливаемые на борту корабля РЛС излучают непрерывный сигнал с коммутацией плоскости поляризации излучаемых радиоволн необходимой для измерения дальности до цели фазовым методом.
Необходимое отношение сигнал/шум на входе приёмника РЛС, при измерении расстояния до цели фазовым методом, определяется заданной погрешностью оценки дальности с помощью формулы:
 (5)
(5)
где  - погрешность цифрового фазометра;
- погрешность цифрового фазометра;
- скорость света;
 - частота коммутации плоскости поляризации.
- частота коммутации плоскости поляризации.
Для снятия неоднозначности фазовых измерений необходимо, чтобы длина волны этой частоты превышала минимальную дальность до цели не менее чем в два раза
Допуская  получим
получим 
При из (5) получим
из (5) получим 
Чтобы получить подобную точность цифровой фазометрии при измерении дальности, необходимо поднять отношение сигнал/шум на входе приемника до величины, определяемой известным соотношением:
 (6)
(6)
Требуемую мощность передатчика РЛС оценим из уравнения радиолокации:
 (7)
(7)
где  - мощность шума на входе приёмника;
- мощность шума на входе приёмника;
 - эффективная поверхность рассеивания цели (ЭПР);
- эффективная поверхность рассеивания цели (ЭПР);
 - эффективная площадь антенны;
- эффективная площадь антенны;
 - КНД антенны РЛС.
- КНД антенны РЛС.
Подстановка величин:
 даёт
даёт 
Если мощность излучения РЛС поднять до 3 Вт, то погрешность измерения дальности можно сократить до 
Задача обнаружения и распознавания цели радиолокатором решается так же, как в гидролокаторе, вычислением коэффициента взаимной корреляции по формулам (1) с перемножением двух отражённых радиосигналов, принятых через один период сканирования сектора обзора.
Преимущества заявленной системы:
1. Высокая точность оценки координат при подводном и надводном положении БПЛ.
2. Скрытность работы РЛС в узком диапазоне частот и помехоустойчивость.
3. Малые габариты ГДЛ и РЛС.
4. Минимальная стоимость.
5. Возможность автоматической работы системы без участия оператора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ создания зоны защиты территорий от низколетящих беспилотных летательных аппаратов | 2023 |
|
RU2821856C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ И ПЕЛЕНГАЦИИ НАДВОДНЫХ ДРОНОВ | 2023 |
|
RU2824842C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ПЕЛЕНГАЦИИ НАДВОДНЫХ ДРОНОВ | 2023 |
|
RU2828006C1 |
| Способ гидролокационного обнаружения высокоскоростного малоразмерного объекта | 2020 |
|
RU2740158C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ МАЛОСКОРОСТНЫХ И МАЛОРАЗМЕРНЫХ БПЛА | 2021 |
|
RU2795472C2 |
| СПОСОБ ПОДГОТОВКИ ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ ЛЕТНОГО БАССЕЙНА ГИДРОАЭРОДРОМА ДЛЯ ВЫПОЛНЕНИЯ ВЗЛЕТА И ПРИВОДНЕНИЯ ГИДРОСАМОЛЕТА | 2013 |
|
RU2539039C1 |
| Способ радиолокации | 2022 |
|
RU2797828C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1998 |
|
RU2124221C1 |
| СПОСОБ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2014 |
|
RU2555192C1 |
| ИМПУЛЬСНЫЙ КОГЕРЕНТНЫЙ РАДИОЛОКАТОР | 1981 |
|
SU1841008A1 |
Изобретение относится к областям гидролокации и радиолокации и может быть использовано для обнаружения, оценки координат и уничтожения морских беспилотных аппаратов дронов (БПА). Техническим результатом является повышение достоверности обнаружения и распознавания малозаметной цели в виде БПА путём декорреляции помех, вызванных волнением моря и кавитацией воды в кильватерных струях корабля и беспилотного аппарата. Заявленная система защиты кораблей от подводных дронов включает установленные на борту корабля комплекс гидролокаторов и радиолокаторов с круговой зоной обзора, обеспечивающих контроль их появления и оценки координат подводных дронов в подводном и надводном положении. Комплекс гидролокаторов включает установленные вдоль борта корабля ниже ватерлинии пары приемо-передающих акустических фазированных антенных решеток с электронным сканированием по азимуту, передающая решетка которых подсоединена к импульсному генератору акустических колебаний, а приемная подсоединена к двум фазовым детекторам, работающим с интервалом в один период излучения передатчика. На выходе фазовых детекторов включены полосовые фильтры сигналов частоты Доплера движущейся цели, подсоединённые через взаимный коррелятор к пороговому устройству распознавания момента появления цели. Комплекс радиолокаторов включает установленные над верхней палубой корабля на мачте узкополосные радиолокаторы с коммутацией плоскости поляризации излучаемых волн, каждый из которых обеспечивает сканирование по азимуту своего сектора обзора. В фокусе зеркала антенн радиолокаторов размещены два ортогональных вибратора, подсоединенных к передатчику. Приемные выходы циркуляторов через амплитудный детектор подсоединены ко второму переключателю, работающему через один период сканирования сектора обзора, подсоединенному к двум полосовым фильтрам, настроенным на частоту коммутации плоскости поляризации, выходы которых подключены через фазовые детекторы к микроконтроллеру, вычисляющему коэффициент взаимной корреляции сигналов частоты Доплера, периодически поступающих через один период сканирования радиолокаторов соответствующего сектора обзора. Обнаружение и распознавание цели производится вычислением коэффициента взаимной корреляции сигналов доплеровской частоты движущейся цели, принятых через один период сканирование пространства, и сравнением вычисленного коэффициента взаимной корреляции с заданным порогом. 1 з.п. ф-лы, 6 ил.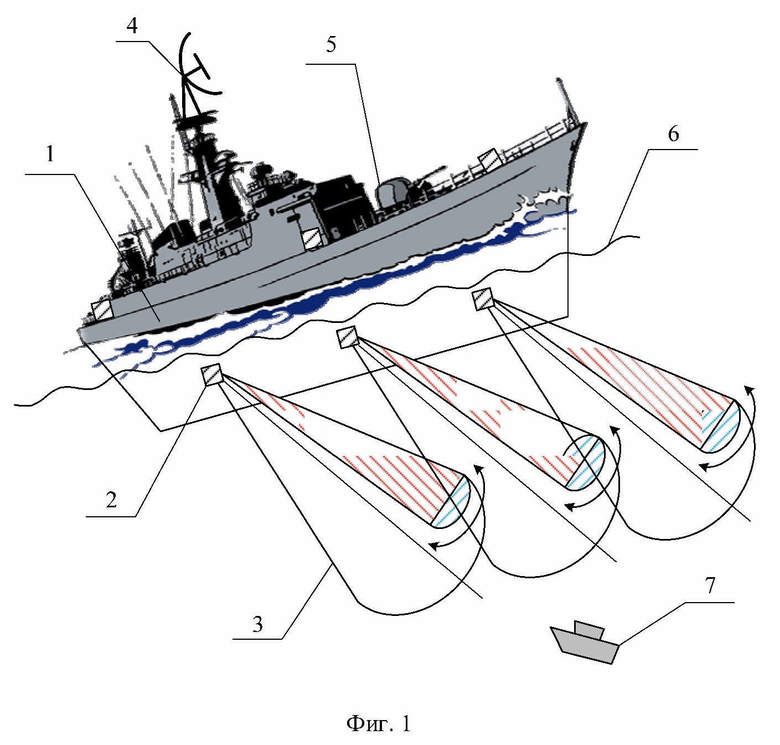
1. Система защиты кораблей от подводных дронов, реализующая излучение и прием сигналов, отличающаяся тем, что включает установленные на борту корабля комплекс гидролокаторов и радиолокаторов с круговой зоной обзора, обеспечивающих контроль их появления и оценки координат подводных дронов в подводном и надводном положении, при этом комплекс гидролокаторов включает установленные вдоль борта корабля ниже ватерлинии пары приемо-передающих акустических фазированных антенных решеток с электронным сканированием по азимуту в пределах ±30 градусов, по количеству, обеспечивающему круговую зону защиты, передающая решетка которых подсоединена к импульсному генератору акустических колебаний, а приемная подсоединена через переключатель к двум фазовым детекторам, работающим с интервалом в один период излучения передатчика, на выходе фазовых детекторов включены полосовые фильтры сигналов частоты Доплера движущейся цели, подсоединённые через взаимный коррелятор к пороговому устройству распознавания момента появления цели, а комплекс радиолокаторов включает установленные над верхней палубой корабля на мачте 4-6 узкополосных радиолокаторов с коммутацией плоскости поляризации излучаемых волн, каждый из которых обеспечивает сканирование по азимуту своего сектор обзора в пределах 60÷90 градусов, в фокусе зеркала антенн радиолокаторов размещены два ортогональных вибратора, подсоединенных через циркуляторы и переключатель к передатчику, а приемные выходы циркуляторов через амплитудный детектор подсоединены ко второму переключателю, работающему через один период сканирования сектора обзора, подсоединенному к двум полосовым фильтрам, настроенным на частоту коммутации плоскости поляризации, выходы которых подключены через фазовые детекторы к микроконтроллеру, вычисляющему коэффициент взаимной корреляции сигналов частоты Доплера, периодически поступающих через один период сканирования радиолокаторов соответствующего сектора обзора.
2. Система по п. 1, отличающаяся тем, что выход одного из фазовых детекторов радиолокатора через интегратор подсоединен к индикатору измерения расстояния до цели.
| ПРИСПОСОБЛЕНИЕ ДЛЯ ПОДАЧИ РАССАДЫ К ПОСАДОЧНЫМ МАШИНАМ | 1929 |
|
SU20389A1 |
| Способ гидролокационного обнаружения высокоскоростного малоразмерного объекта | 2020 |
|
RU2740158C1 |
| СПОСОБ ГИДРОЛОКАЦИИ В МЕЛКОВОДНЫХ ОБЛАСТЯХ С ОПЕРАТИВНЫМ КОНТРОЛЕМ ИЗМЕНЧИВОСТИ УСЛОВИЙ ОБНАРУЖЕНИЯ ПОДВОДНОЙ ЦЕЛИ | 2017 |
|
RU2664869C1 |
| Способ радиолокации | 2022 |
|
RU2797828C1 |
| Гидроакустический комплекс для надводных кораблей | 2023 |
|
RU2805135C1 |
| СПОСОБ И УСТРОЙСТВО СЕЛЕКЦИИ СИГНАЛОВ НАДВОДНОЙ ЦЕЛИ В МОНОИМПУЛЬСНОЙ РЛС | 2004 |
|
RU2278397C2 |
| CN 116300890 A, 23.06.2023 | |||
| US 2020103499 A1, 02.04.2020. | |||
