Изобретение относится к области трубопроводного транспорта и может быть использовано для обнаружения местоположения дефектов магистральных и иных трубопроводов, а также криминальных (несанкционированных) врезок в трубопровод. Коррозия, приводящая к уменьшению толщины металла, и деформация, изменяющая посредством возникновения механического напряжения магнитную проницаемость металла трубы, являются причиной изменения картины распределения силовых линий естественного магнитного поля Земли. Исходя из этого, магнитное поле вблизи трубы является косвенным источником данных о распределении и состоянии металла трубопровода.
Точечные дефекты и врезки в трубопровод обычно искажают магнитное поле таким образом, что концентрация силовых линий сначала нарастает, а потом падает ниже среднего уровня, или наоборот. Возможен случай, когда силовые линии сконцентрированы над дефектом (врезкой), а на небольшом удалении от него модуль вертикальной составляющей ниже среднего над трубопроводом. Обширные дефекты, такие как ручейковая коррозия или провисание отрезка трубы, проявляют себя в виде продолжительного значительного изменения вертикальной составляющей вектора магнитной индукции. В этом случае локализация дефекта заключается в нахождении места резкого изменения вертикальной составляющей, а затем места возврата этого значения к прежнему уровню.
Существует несколько способов обнаружения дефектов с помощью системы датчиков - термооптических, электромагнитных, тензорезистивных и других, менее распространенных. Работа таких систем заключается в том, что с датчиков собирается информация о состоянии трубопровода, обрабатывается, кодируется и передается по кабелю или с помощью беспроводной связи на пульт оператора. Недостатки таких систем очевидны: необходимость установки большого количества датчиков и устройств передачи сигнала, откапывание трубы при установке датчиков, кроме того, некоторые варианты пригодны к применению только на открытых трубопроводах или на трубопроводах с катодной защитой (Заявка РФ №2002119698, Бюл. №7, 2002 г.).
Широко распространены способы внутритрубной диагностики, сущность которых заключается в том, что внутрь трубы запускается специальный диагностический снаряд-поршень, перемещающийся под действием давления, искусственно создаваемого за ним. Диагностический снаряд снабжен системой датчиков (механических, ультразвуковых или электромагнитных), которые сканируют трубопровод по мере продвижения диагностического снаряда, информация с датчиков записывается в энергонезависимую память и может быть считана и обработана после извлечения поршня из трубы. Главными недостатками таких способов диагностики являются необходимость прекратить транспортировку продукта по трубопроводу, разрезать трубу и установить устройство нагнетания давления для продвижения поршня, сложность определения местоположения дефекта ввиду несовершенства устройств измерения пройденного внутри трубы расстояния (одометров), кроме того, существует вероятность застревания поршня при сильной деформации трубы или уменьшения ее внутреннего диаметра в результате засорения примесями: газоконденсатом, парафинами и пр. (Заявки РФ №2000111965, №93057860, патент РФ 2102737, м.кл. F17D 5/01).
Наиболее близким техническим решением к заявляемому способу является способ обнаружения дефектов внутрипромысловых трубопроводов, заключающийся в следующем: измеряют значения модуля полного вектора магнитной индукции над трубопроводом в точках, отстоящих друг от друга на расстоянии 0,25-0,5 м, путем перемещения датчика вдоль линии трубопровода, строят график зависимости величины модуля вектора магнитной индукции от расстояния и находят средние значения магнитной индукции для выбранного участка, затем определяют величины среднеквадратичных отклонений и выделяют участки трубопровода, где величины значений модуля индукции магнитного поля равны или превышают удвоенное значение величины среднеквадратического отклонения, выделенные на графике участки трубопровода определяют на местности, раскапывают эти участки и осуществляют визуально-измерительный контроль с использованием контактных средств диагностики.
Средние значения величин магнитной индукции определяют для участка длиной не более 250 м (Патент РФ 2301941 от 12.01.2006, м.кл. F17D 5/02).
Этот способ имеет ряд существенных недостатков: в нем используется магнитометр - достаточно дорогой измерительный прибор, выполнение измерений с помощью которого требуют неподвижности сенсоров прибора, что приводит к необходимости останавливаться для каждого измерения, существенно снижая скорость обследования трубопровода; в ходе обследования приходится работать с большим количеством данных - до 4000 значений на километр трассы, причем результаты обследования становятся доступными только после математической обработки всего массива данных (или по крайней мере данных, собранных на протяжении 250 м). Кроме того, при измерении полного вектора магнитной индукции имеет решающее значение ориентация датчиков прибора в пространстве по азимуту, по вертикали и по смещению относительно оси трубы, и отклонение, особенно азимутальное, вносит сильные колебания показаний при измерении составляющих вектора магнитной индукции, что негативно сказывается на достоверности результатов обследования.
В последнее время в связи со значительным износом магистральных и локальных трубопроводов, а также с участившимися случаями несанкционированных врезок в трубопроводы с сырой нефтью и нефтепродуктами возникла насущная потребность в технических средствах, позволяющих быстро, гибко и с минимальными затратами проводить предварительную диагностику состояния трубопровода и поиск врезок в трубопровод. Существующие на сегодняшний день образцы являются в основном внутритрубными дефектоскопами, запускаемыми внутрь трубопровода и сканирующими трубопровод по мере продвижения под действием искусственно создаваемого позади них давления.
Ближайшим по технической сущности и назначению к предлагаемому устройству является устройство обнаружения неразрешенного отбора продуктов транспортировки из трубопровода (патент РФ №2191322, м.кл. F16D 5/00, заявка от 19.03.2001). Устройство является внутритрубным снарядом и содержит перемещающийся на роликах узел, несущий электронные блоки, датчик пройденного пути, множество емкостных электромеханических датчиков отверстий, расположенных на прилегающем к трубопроводу кольце и соединенных через схему логического ИЛИ со счетчиком импульсов, счетный вход которого подключен к датчику пройденного пути, выполненному с внутренним магнитом, обеспечивающим его скольжение по стенке трубопровода без скольжения.
Данному устройству присущи все недостатки типичного внутритрубного снаряда-диагноста: необходимость останавливать транспортировку продукта, запускать устройство внутрь через пусковую камеру, нагнетать давление, что занимает несколько дней, кроме того, существует вероятность того, что устройство застрянет внутри трубы, что оно разрядится, будет повреждено при вылете из трубы, что его подвижные механические части засорятся парафинами и газоконденсатом. Отдельной проблемой является определение точного местоположения обнаруженного дефекта или врезки, так как устройства измерения пройденного расстояния при всем многообразии конструкций часто отказывают или бывают неточны.
Задачей предлагаемого изобретения является упрощение способа, его удешевление за счет снижения затрат на аппаратуру, повышение достоверности результатов обследования и уменьшение времени, необходимого для подготовки и проведения обследования.
Указанная задача решается тем, что в способе обнаружения дефектов трубопровода и несанкционированных врезок в трубопровод, включающем измерение магнитной индукции над трубопроводом с одновременным перемещением датчика вдоль трубопровода, выявление участков с дефектом, раскапывание трубы с последующим визуальным осмотром и контактной диагностикой, согласно изобретению измеряют только вертикальную составляющую вектора магнитной индукции, измерения проводят непрерывно в процессе перемещения датчика вдоль трубопровода, отслеживают сильные, более 10%, изменения модуля вертикальной составляющей вектора магнитной индукции, а над местом сильного изменения магнитной индукции производят повторный проход датчика.
Также указанная задача решается тем, что устройство для обнаружения дефектов трубопровода и несанкционированных врезок в трубопровод содержит антенну на карданном подвесе с вертикально расположенным феррозондовым датчиком внутри, соединительный кабель, корпус с электронным блоком внутри. Согласно изобретению электронный блок содержит микроконтроллер, выходной буферный каскад 6, программируемый делитель, повторитель напряжения, входной усилитель, перемножитель частот, фильтр нижних частот, логарифмический усилитель, узкополосный фильтр, выпрямитель-интегратор и жидкокристаллический дисплей, причем сигнальная обмотка феррозондового датчика соединена через входной усилитель с перемножителем частот, который соединен с фильтром нижних частот, подключенным через логарифмический усилитель к узкополосному фильтру, выход которого в свою очередь через выпрямитель-интегратор соединен с микроконтроллером.
Предлагаемый способ обнаружения дефектов в трубопроводе и несанкционированных врезок в трубопровод осуществляют путем измерения магнитной индукции над трубопроводом с помощью предлагаемого устройства с одновременным перемещением датчика вдоль оси трубопровода, причем измеряют только вертикальную составляющую вектора магнитной индукции непрерывно в процессе перемещения датчика и отслеживают сильные, более 10%, изменения модуля вертикальной составляющей вектора магнитной индукции, затем отмечают выявленные участки и раскапывают трубу для осмотра, контактной диагностики и ремонта. В качестве информативной составляющей была выбрана вертикальная составляющая вектора магнитной индукции поля Земли над трубопроводом: при этом показания прибора не зависят от азимутального расположения датчиков прибора, а вертикальное положение легко поддерживать, используя отвес с датчиком, закрепленным на нем так, чтобы ось чувствительности датчика располагалась вертикально. Это упрощает использование магнитометра и позволяет не останавливаться для выполнения измерений, а двигаться с постоянной скоростью, следя за показаниями прибора.
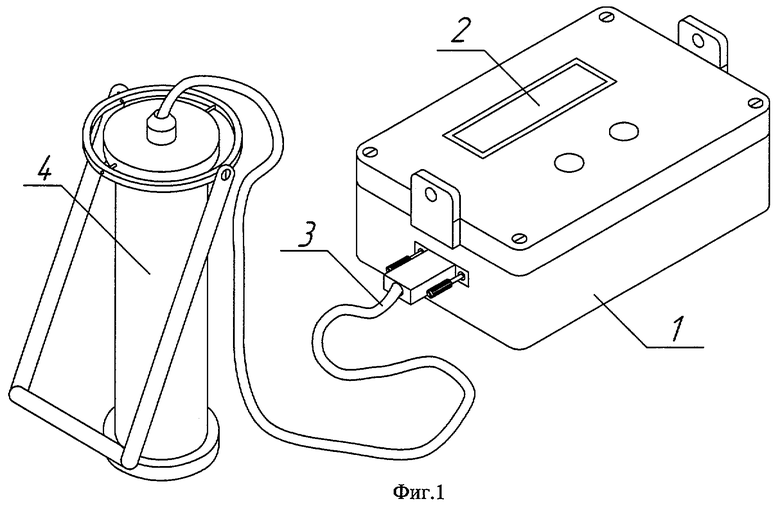
На фиг.1 представлен общий вид устройства.
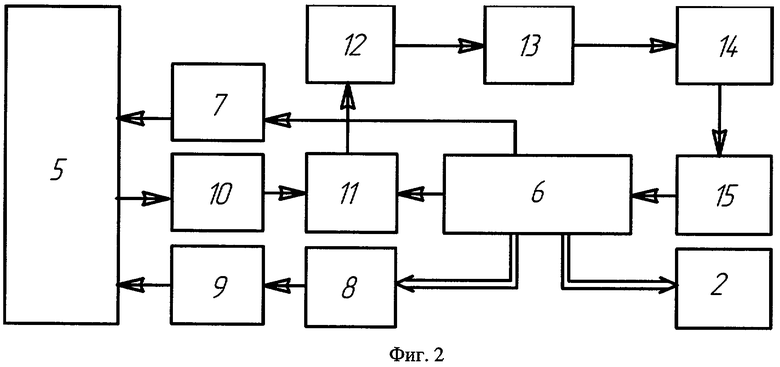
На фиг.2 представлена функциональная схема устройства.
Устройство содержит: корпус 1 (фиг.1) с жидкокристаллическим дисплеем 2 на верхней грани, соединительный кабель 3, антенну 4 с феррозондовым датчиком 5 (фиг.2) внутри, микроконтроллер 6, выходной буферный каскад 7, программируемый делитель 8, повторитель напряжения 9, входной усилитель 10, перемножитель частот 11, фильтр нижних частот 12, логарифмический усилитель 13, узкополосный фильтр 14, выпрямитель-интегратор 15.
Наиболее очевидный способ значительно снизить стоимость и время обследования - отказаться от внутритрубных снарядов и вообще от контактной диагностики, по крайней мере на первичном этапе обследования. Описанный выше способ позволяет сделать это с небольшими аппаратными затратами - для этого необходим прибор для контроля вертикальной составляющей магнитного поля Земли непосредственно над трубопроводом. Но использование промышленно выпускаемых однокомпонентных магнитометров не всегда удобно и оправдано: они, как правило, достаточно инерционны, имеют неудобное расположение и форму датчика, обладают избыточной точностью и большим временем обработки результатов, часто требуют неподвижности при проведении измерений, дороги и основаны на сложных в эксплуатации технологиях измерения магнитной индукции, таких как СКВИД или ЯМР. Следовательно, возникает необходимость в компактном недорогом портативном устройстве, пригодном для практической реализации вышеуказанного способа, а именно приборе, приспособленном для контроля вертикальной составляющей магнитной индукции, простом и технологичном в изготовлении, не нуждающемся в точной поверке, пригодном для переноски и использования одним человеком.
Принцип действия устройства показан на функциональной схеме (фиг.2): микроконтроллер 6 через выходной каскад 7 выдает на обмотку возбуждения феррозондового датчика 5 переменное напряжение, а с сигнальной обмотки снимается выходной сигнал феррозонда. Сигнал попадает на входной усилитель 10, который усиливает сигнал и развязывает электрически обмотку и перемножитель частот 11. Перемножитель частот 11 изменяет спектральный состав сигнала для более эффективной последующей обработки, после чего сигнал фильтруется на фильтре нижних частот 12, усиливается на логарифмическом усилителе 13 и повторно фильтруется на узкополосном фильтре 14, затем переводится в постоянное напряжение на выпрямителе-интеграторе 15, с которого подается на микроконтроллер 6, измеряющий и обрабатывающий сигнал в соответствии с записанной в него программой. При необходимости микроконтроллер через программируемый делитель 8 и повторитель напряжения 9 подает на компенсационную обмотку феррозондового датчика компенсирующий сигнал, уменьшающий влияние постоянного магнитного поля Земли и тем самым повышающий чувствительность устройства. Результат измерения микроконтроллер 6 выводит на жидкокристаллический дисплей 2, расположенный на верхней крышке корпуса 1 устройства. Антенна 4 снабжена ручкой с карданным подвесом, который обеспечивает подвижность самой антенны в двух направлениях, в результате чего антенна 4 с заключенным внутри феррозондом 5 при поднятии ее за ручку автоматически принимает вертикальное положение, обеспечивающее измерение именно вертикальной составляющей вектора магнитной индукции поля Земли. В целом конструкция устройства получается легкой и компактной, а схема позволяет включить в него ряд устройств, обеспечивающих дополнительные сервисные функции, такие как контроль заряда аккумулятора или привязка к местности с использованием систем GPS или Глонасс.
Таким образом, предлагаемый способ и устройство для его осуществления отличаются простотой и достоверностью результатов обследования и найдут широкое применение для обнаружения дефектов магистральных и иных трубопроводов, а также несанкционированных (криминальных) врезок в трубопровод.
Изобретение относится к области трубопроводного транспорта и может быть использовано для обнаружения местоположения дефектов магистральных и иных трубопроводов, а также криминальных (несанкционированных) врезок в трубопровод. Технический результат изобретения - упрощение способа, его удешевление за счет снижения затрат на аппаратуру и повышение достоверности результатов обследования. В способе обнаружения дефектов трубопровода и несанкционированных врезок в трубопровод, включающем измерение магнитной индукции над трубопроводом с одновременным перемещением датчика вдоль трубопровода, выявление участка с дефектом, раскапывание трубы с последующим визуальным осмотром и контактной диагностикой, измеряют только вертикальную составляющую вектора магнитной индукции, измерения проводят непрерывно в процессе перемещения датчика, отслеживают сильные, более 10%, изменения модуля вертикальной составляющей вектора магнитной индукции, над местом сильного изменения магнитной индукции производят повторный проход датчика. В устройстве для обнаружения дефектов трубопровода и несанкционированных врезок в трубопровод, содержащем корпус с электронным блоком, последний содержит антенну с вертикально расположенным феррозондовым датчиком на карданной подвеске, соединительный кабель, микроконтроллер, выходной буферный каскад, программируемый делитель, повторитель напряжения, входной усилитель, перемножитель частот, фильтр нижних частот, логарифмический усилитель, узкополосный фильтр, выпрямитель-интегратор, жидкокристаллический дисплей, причем сигнальная обмотка соединена через входной усилитель с перемножителем частот, который соединен с фильтром нижних частот, подключенным через логарифмический усилитель к узкополосному фильтру, выход которого в свою очередь через выпрямитель-интегратор соединен с микроконтроллером. 2 н.п. ф-лы, 2 ил.
1. Способ обнаружения дефектов трубопровода и несанкционированных врезок в трубопровод, включающий измерение магнитной индукции над трубопроводом с одновременным перемещением датчика вдоль трубопровода, выявление участка с дефектом, раскапывание трубы с последующим визуальным осмотром и контактной диагностикой, отличающийся тем, что измеряют только вертикальную составляющую вектора магнитной индукции, измерения проводят непрерывно в процессе перемещения датчика, отслеживают сильные, более 10%, изменения модуля вертикальной составляющей вектора магнитной индукции, над местом сильного изменения магнитной индукции производят повторный проход датчика.
2. Устройство для обнаружения дефектов трубопровода и несанкционированных врезок в трубопровод, содержащее корпус с электронным блоком, отличающееся тем, что электронный блок содержит антенну с вертикально расположенным феррозондовым датчиком на карданной подвеске, соединительный кабель, микроконтроллер, выходной буферный каскад, программируемый делитель, повторитель напряжения, входной усилитель, перемножитель частот, фильтр нижних частот, логарифмический усилитель, узкополосный фильтр, выпрямитель-интегратор, жидкокристаллический дисплей, причем сигнальная обмотка соединена через входной усилитель с перемножителем частот, который соединен с фильтром нижних частот, подключенным через логарифмический усилитель к узкополосному фильтру, выход которого в свою очередь через выпрямитель-интегратор соединен с микроконтроллером.
| СПОСОБ ОБНАРУЖЕНИЯ ДЕФЕКТОВ ВНУТРИПРОМЫСЛОВЫХ ТРУБОПРОВОДОВ | 2006 |
|
RU2301941C1 |
| УСТРОЙСТВО ДЛЯ ВНУТРИТРУБНОЙ МАГНИТНОЙ ДЕФЕКТОСКОПИИ СТЕНОК СТАЛЬНЫХ ТРУБОПРОВОДОВ | 1993 |
|
RU2102737C1 |
| RU 2062394 C1, 20.06.1996 | |||
| Электропотенциальный измеритель глубины трещин | 1987 |
|
SU1408205A1 |
| СПОСОБ ВНУТРИТРУБНОЙ ДИАГНОСТИКИ | 1999 |
|
RU2169308C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ МАГИСТРАЛЬНОГО ТРУБОПРОВОДА | 1999 |
|
RU2174645C2 |
| ПОЛИМЕРНАЯ КОМПОЗИЦИЯ | 1992 |
|
RU2048496C1 |

