Изобретение относится к измерительной технике и может быть использовано для бесконтактного контроля дефектов магистральных трубопроводов углеводородов и мест несанкционированной откачки нефти с использованием бесконтактных летательных аппаратов.
Широко известны применяемые на практике внутритрубные дефектоскопы, основанные на использовании ультразвуковых и магнитных методов наблюдения дефектов стенок трубопроводов при перемещении прибора в потоке внутритрубного продукта [RU № 161019, F17D 5/00, опубл. 10.04.2016], [RU № 117186, G01N 27/00, опубл. 20.06.2012].
Основным недостатком подобных дефектоскопов является низкая скорость обследования трубопроводов, небольшая длина обследования и необходимость вмешательства в процесс перекачки продукта.
Известен автономный магнитный дефектоскоп наружного контроля трубопроводов, содержащий магнито-поисковую систему и устройство бесконтактной связи [RU №75750, G01N 27/84, опубл. 20.08.2008].
Однако, как и внутритрубные дефектоскопы, они требуют использование человека-оператора для обслуживания дефектоскопов и требует контакта с поверхностью трубопровода.
Проблематично использование подобных устройств для контроля трубопроводов под слоем Земли или воды.
Известен мобильный георадар [RU № 2256941, G01V 3/17, G01S 13/88, опубл. 16.06.2004] для дистанционного поиска подземных магистральных коммуникаций и определения их поперечных размеров и глубины залегания в грунте, содержащий радиолокатор с видео-импульсным излучаемым сигналов, монтируемый на беспилотном летательном аппарате.
Однако этот георадар, из-за низкой чувствительности, не предназначен для регистрации дефектов трубы.
Техническим результатом изобретения является расширение функциональных возможностей системы, с целью определения одновременно дефектов, сварных швов, линии положения трубопровода и мест несанкционированной откачки, повышение скорости обследования, а также снижение трудоемкости.
Предложена система для дистанционного обнаружения дефектов и мест несанкционированной откачки в магистральных трубопроводах на базе беспилотного летательного аппарата (БПЛА), состоящая из радиолокатора, включающего передатчик и приемник, соединенные с фазируемой антенной решеткой (ФАР), отличающаяся тем, что ФАР состоит из двух частей левого и правого крыла, вибраторы которых соединены высокочастотными кабелями с сумматорами радиосигналов, соединённые через передающие входы циркуляторов и коммутатор с передатчиком, приемные выходы циркуляторов подключены через коммутаторы и сумматор высокочастотных сигналов к амплитудному детектору, выходы которого подключены к трем полосовым фильтрам, настроенным на частоты коммутации, нормальных вибраций трубопровода и частоты вибраций дефекта, при этом выход фильтра частоты коммутации, через фазовый детектор, подсоединён к рулевой машине управления высотой полета, а выход фильтров нормальных вибраций левой и правой ФАР и частот вибраций дефекта подключены через микроконтроллер к блоку флэш-памяти.
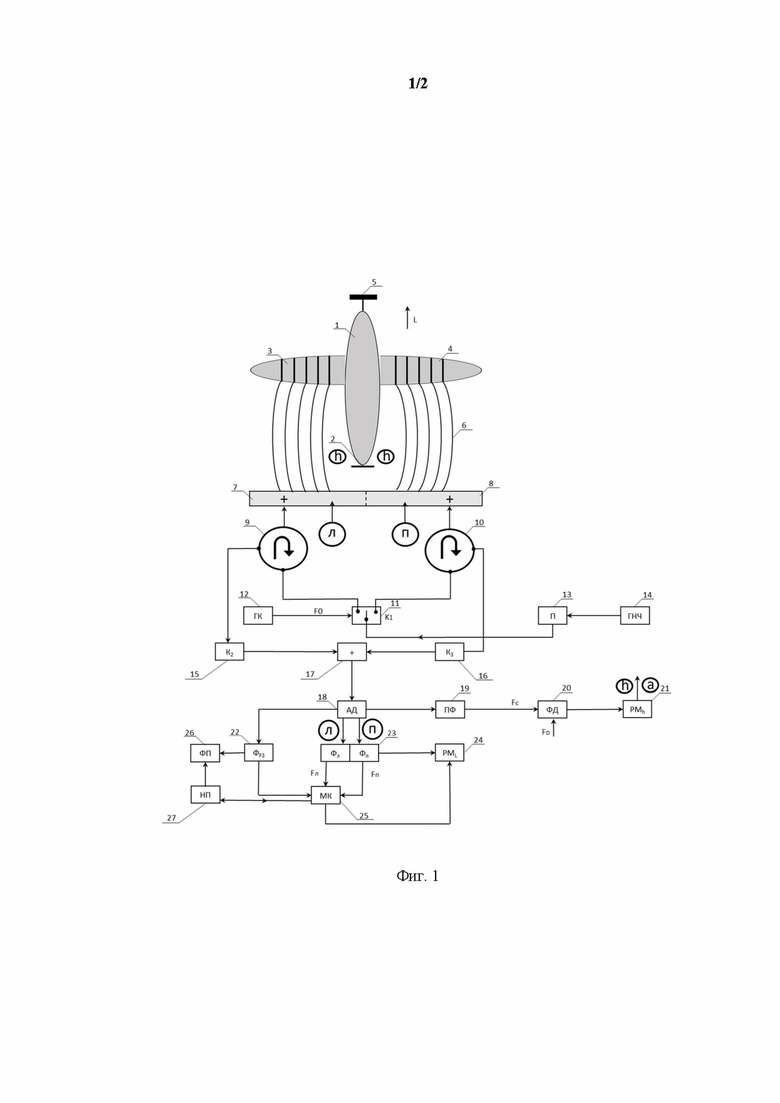
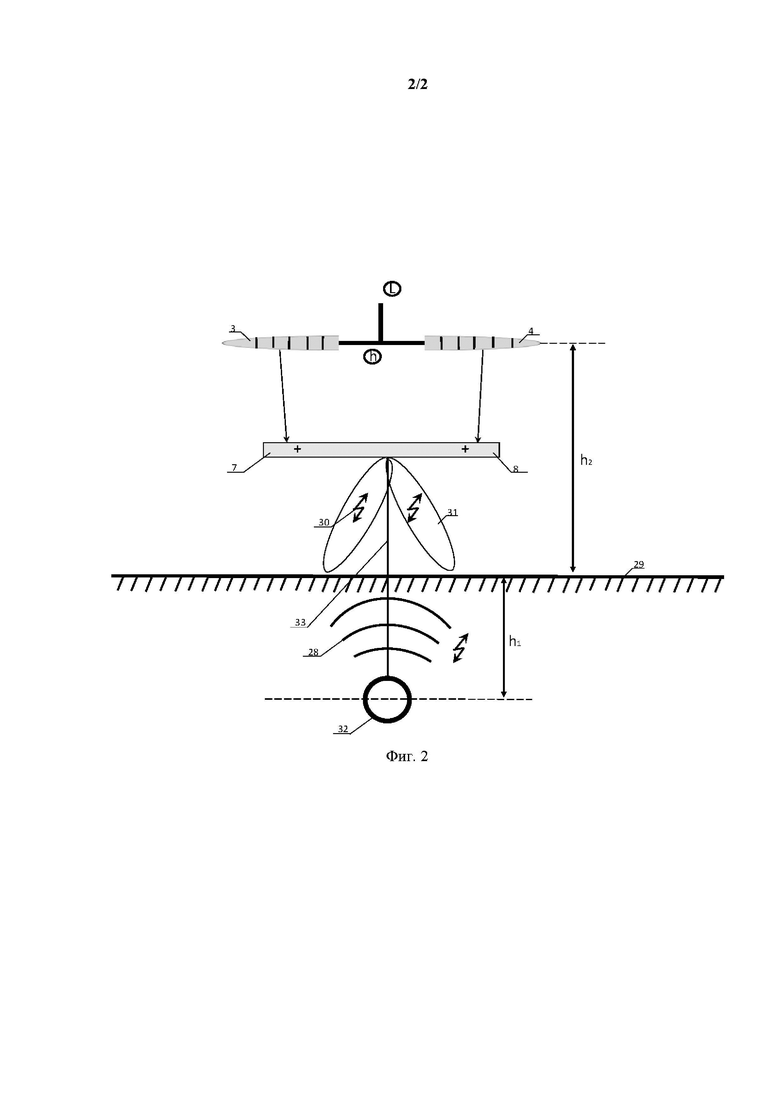
Изобретение поясняется чертежами. На фиг. 1 изображена структурная схема заявленной системы. На фиг. 2 изображена схема облучения поверхности земли.
Система состоит из БПЛА 1 самолетного типа, управляемого винтом 5, хвостовыми рулями высоты и курса полета 2, с расположенным на его крыльях двух фазированных антенных решеток (ФАР) с горизонтальными электрическими вибраторами 3, 4, соединёнными высокочастотным кабелем 6 с сумматорами радиосигналов 7, 8, выходы которых через циркуляторы 9,10 подключены через коммутатор 11 и передатчик 13 к генератору несущей частоты 14, а также через коммутатор 11 к генератору частоты коммутации 12.
Приемные выходы циркуляторов подсоединены через электронные ключи 15, 16 к сумматору сигналов 17, подключенному по выходу к амплитудному детектору 18.
Выходы амплитудного детектора 18 подключены к трем полосовым фильтрам, настроенным соответственно на частоту коммутации 19, частоты нормально работающего трубопровода 23 и вибрации дефекта 22. При этом, выход полосового фильтра 19 подключен через фазовый детектор 20 к рулевой машине управления высотой полета БПЛА 21, выход ПФ 23 подключены к рулевой машине управления курсом полета 24, выход ПФ 22 через МК 25 подсоединён к устройству флэш-памяти 26, ко второму входу которого подсоединён выход навигационного приемника 27. Согласно фиг. 2 изображена схема облучения поверхности земли 29 и трубопровода 32 симметричными относительно друг друга радиолучами 30, 31 с равносигнальной зоной 33 и фронтом радиоволны 28.
Система работает следующим образом.
После запуска БПЛА 1 в направлении трубопровода, микроконтроллер 25 включает передатчик РЛС 13 синхронизируемый по несущей частоте генератором 14. Коммутатор 11 поочередно переключает передающие входы циркуляторов 9, 10 на левую или правую ФАР 7, 8, которые формируют две смещенные в вертикальной плоскости диаграммы направленных радиолучей 30, 31 так, что при смещении курса полета БПЛА вправо или влево от линий положения трубы, рулевая машина 24 выравнивает смещение БПЛА относительно равносигнальной зоны 33. Текущая высота полета БПЛА определяется по разности фаз частоты коммутации радиосигнала и опорной частоты F0 поступающей на ФД 20 от генератора частоты коммутации 12. При появлении на выходе полосового фильтра 19 сигнала частоты вибраций дефекта трубы, время и координаты вибраций запоминается во флэш-памяти 26 с помощью навигационного приемника Глонасс GPS 27.
Поскольку частоты вибраций дефекта и места несанкционированной откачки нефти Fд, Fн > 10кГц существенно выше чем частоты вибрации бездефектной трубы F≈2÷5 Гц, то сигналы дефектов выделяются на фоне нормально работающего трубопровода.
При скорости ультразвука в нефти ν = 1500 м/с и диаметра отверстия в металле трубы δ = 1мм, время прохождения струи жидкости составляет
 = 1.3 мкс
= 1.3 мкс
частота генерации звука на отверстии приближено оценивается как  = 800 кГц. Физической основой работы дефектоскопа является фазовая модуляция радиосигнала РЛС вибрациями поверхности стенки трубы.
= 800 кГц. Физической основой работы дефектоскопа является фазовая модуляция радиосигнала РЛС вибрациями поверхности стенки трубы.
Оценим требуемую мощность передатчика РЛС при заданных высотах полета БПЛА над поверхность земли h1, глубины положения трубы h2. Глубина фазовой модуляции радиосигнала вибрациями трубы амплитудой δ может быть определена как:
 , рад (1)
, рад (1)
Где  - скорость распространения радиоволн в покрывающем трубу грунте,
- скорость распространения радиоволн в покрывающем трубу грунте,  - рабочая частота РЛС.
- рабочая частота РЛС.
 ≈
≈  (2), где n - коэффициент преломления в грунте,
(2), где n - коэффициент преломления в грунте,  ≈ 9 - относительная диэлектрическая проницаемость.
≈ 9 - относительная диэлектрическая проницаемость.
Поскольку коэффициент модуляции по фазе соответствует для амплитудной модуляции, как  , то напряжение равно сигналам на выходе ФАР запишем как:
, то напряжение равно сигналам на выходе ФАР запишем как:
 sin(2
sin(2 t+ ϕ0)sin(2
t+ ϕ0)sin(2 + ϕн) (3)
+ ϕн) (3)
После амплитудной демодуляции на выходе детектора получим:
 sin(2t + ϕ0)] (4)
sin(2t + ϕ0)] (4)
Используя уравнение радиолокации, найдем требуемую мощность передатчика:
 (5)
(5)
Здесь q - требуемое отношение сигнал / шум на входе приемника
 - мощность теплового шума
- мощность теплового шума
К=1.38 10-23Дж/К
ТК ≈ 300 К
 -полоса шумов
-полоса шумов
 - эффективная площадь ФАР
- эффективная площадь ФАР
Q = 4π коэффициент направленности действия ФАР
коэффициент направленности действия ФАР
λ - длина волны
σT =  ;
;  =
=  ;
;
σT - эффективная поверхность рассеивания радиоволны цилиндром трубы,  - радиус трубы,
- радиус трубы,  - эффективная длина участка трубы облучаемого РЛС
- эффективная длина участка трубы облучаемого РЛС
 коэффициент поглощения радиоволн
коэффициент поглощения радиоволн
μ = 4π 10-7 - магнитная проницаемость воздуха
ω = 2π - частота радиоволн
- частота радиоволн
Дадим численную оценку мощности по (5) при следующих прочих параметрах:
σT =  м2
м2
q = 10;
= 103Гц;  =20м;
=20м;  =1.5м;
=1.5м;  = 10-4м; = 0.5м2; = 0.5м;
= 10-4м; = 0.5м2; = 0.5м; 
Q =6.28; 
= 0.3м;
MА = 0.7 10-5;
σ = 10-3 Сим/м;
= 3м.
Подстановка в (5) дает  = 2Вт.
= 2Вт.
Таким образом, при мощности передатчика РЛС 2Вт на частоте 300 МГц, возможна регистрация вибраций трубы с амплитудой = 1мкм.
Навигационное обеспечение полета БПЛА производится использованием на борту приемника космических систем Глонасс-GPS, а определение курса полета вдоль положения трубопровода путем измерения отклонения линии полета равносигнальной зоны РЛС.
Высота полета определяется с помощью измерения разности фаз между опорными сигналами частоты коммутации и выделенным из принятой после демодуляции этой частоты с помощью полосового фильтра 19.
Точность определения высоты полета, согласно [RU № 2797828, G01S 3/38, G01S 7/35, опубл. 27.07.2022] определяется погрешностью цифрового фазометра  ϕ. Так при погрешности в один градус, ошибка в измерении высоты полета определяется через соотношение
ϕ. Так при погрешности в один градус, ошибка в измерении высоты полета определяется через соотношение
ϕрад = 2πFк  (6)
(6)
Или
 (7)
(7)
С-скорость света
Fк - частота коммутации выбирается так, чтобы не было длина волны сигнала этой частоты превышала двойную высоту полета БПЛА h1:
 > 2h1 (8)
> 2h1 (8)
Так при h1 = 20м, на частоте коммутации  =
=  = 7.5 мГц
= 7.5 мГц
 .
.
| название | год | авторы | номер документа |
|---|---|---|---|
| Дистанционная система обнаружения несанкционированных врезок в магистральные трубопроводы | 2024 |
|
RU2839501C1 |
| Бесконтактный дефектоскоп трубопроводов | 2024 |
|
RU2832369C1 |
| Способ дистанционной диагностики магистральных трубопроводов | 2024 |
|
RU2826327C1 |
| Способ создания зоны защиты территорий от низколетящих беспилотных летательных аппаратов | 2023 |
|
RU2821856C1 |
| Способ радиолокации | 2022 |
|
RU2797828C1 |
| Система защиты кораблей от подводных дронов | 2024 |
|
RU2832756C1 |
| Многоканальное устройство для измерения амплитудно-фазового распределения поля фазированной антенной решетки | 1986 |
|
SU1474563A1 |
| СИСТЕМА СВЯЗИ НАЗЕМНОГО ПУНКТА УПРАВЛЕНИЯ С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2024 |
|
RU2825035C1 |
| НАВИГАЦИОННО-РАДИОЛОКАЦИОННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2805163C1 |
| Бортовая радиолокационная станция дистанционно управляемого летательного аппарата | 2017 |
|
RU2668995C1 |
Изобретение относится к измерительной технике и может быть использовано для бесконтактного контроля дефектов магистральных трубопроводов углеводородов и мест несанкционированной откачки нефти с использованием бесконтактных летательных аппаратов. В изобретении фазируемая антенная решетка (ФАР) состоит из двух частей левого и правого крыльев, вибраторы которых соединены высокочастотными кабелями с сумматорами радиосигналов, соединенными через передающие входы циркуляторов и коммутатор с передатчиком, приемные выходы циркуляторов подключены через коммутаторы и сумматор высокочастотных сигналов к амплитудному детектору, выходы которого подключены к трем полосовым фильтрам, настроенным на частоты коммутации, нормальных вибраций трубопровода и частоты вибраций дефекта, при этом выход фильтра частоты коммутации, через фазовый детектор, подсоединен к рулевой машине управления высотой полета, а выходы фильтров нормальных вибраций левой и правой ФАР и частот вибраций дефекта подключены через микроконтроллер к блоку флэш-памяти. Техническим результатом изобретения является расширение функциональных возможностей системы, с целью определения одновременно дефектов, сварных швов, линии положения трубопровода и мест несанкционированной откачки, повышение скорости обследования, а также снижение трудоемкости. 2 ил.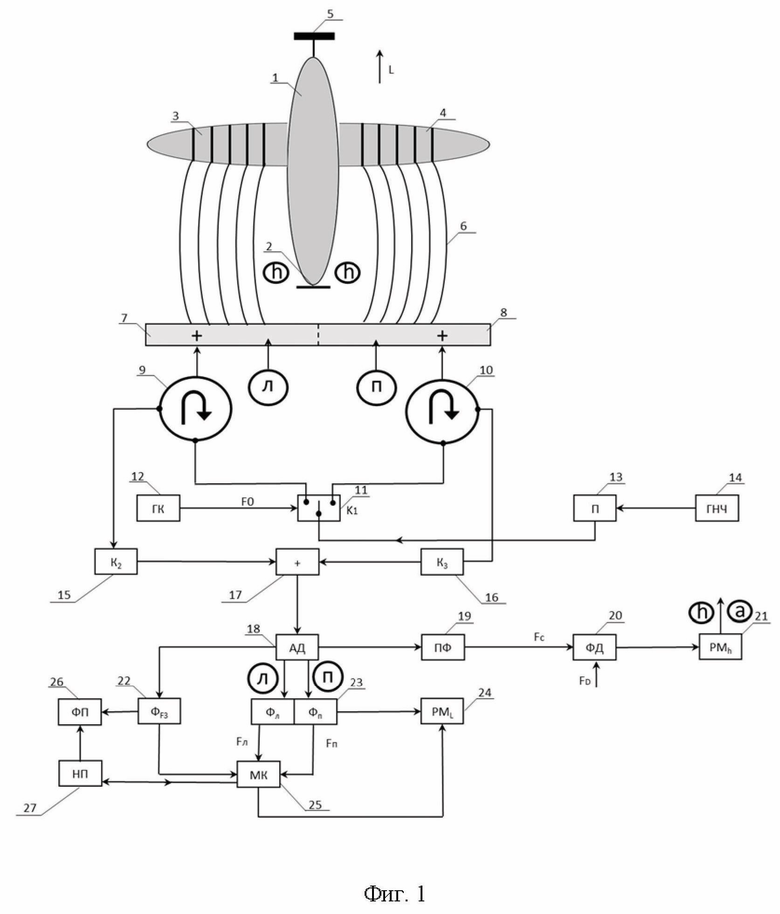
Система для дистанционного обнаружения дефектов и мест несанкционированной откачки в магистральных трубопроводах на базе беспилотного летательного аппарата, состоящая из радиолокатора, включающего передатчик и приемник, соединенные с фазируемой антенной решеткой, отличающаяся тем, что фазируемая антенная решетка состоит из двух частей левого и правого крыльев, вибраторы которых соединены высокочастотными кабелями с сумматорами радиосигналов, соединенными через передающие входы циркуляторов и коммутатор с передатчиком, приемные выходы циркуляторов подключены через коммутаторы и сумматор высокочастотных сигналов к амплитудному детектору, выходы которого подключены к трем полосовым фильтрам, настроенным на частоты коммутации, нормальных вибраций трубопровода и частоты вибраций дефекта, при этом выход фильтра частоты коммутации, через фазовый детектор, подсоединен к рулевой машине управления высотой полета, а выходы фильтров нормальных вибраций левой и правой фазируемой антенной решетки и частот вибраций дефекта подключены через микроконтроллер к блоку флэш-памяти.
| МОБИЛЬНЫЙ ГЕОРАДАР ДЛЯ ДИСТАНЦИОННОГО ПОИСКА МЕСТОПОЛОЖЕНИЯ ПОДЗЕМНЫХ МАГИСТРАЛЬНЫХ КОММУНИКАЦИЙ И ОПРЕДЕЛЕНИЯ ИХ ПОПЕРЕЧНОГО РАЗМЕРА И ГЛУБИНЫ ЗАЛЕГАНИЯ В ГРУНТЕ | 2004 |
|
RU2256941C1 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2001 |
|
RU2207588C2 |
| Вертолетная радиолокационная станция | 1991 |
|
SU1810859A1 |
| US 6252538 B1, 26.06.2001 | |||
| US 5502444 A, 26.03.1996 | |||
| US 11714189 B2, 01.08.2023. | |||

