Изобретение относится к электротехнике, а именно релейной защите, и предназначено для реализации в устройствах определения места повреждения линий электропередачи (ЛЭП), а также в измерительных органах дистанционной защиты.
Известны способы определения места повреждения линии электропередачи с использованием ее моделей [например, Шалыт Г.М. Определение мест повреждения в электрических сетях. - М.: Энергоиздат, 1982, с. 223; Патент РФ №2033623 опубл. 20.04.1995; Патент РФ №2116654 опубл. 27.07.1998; Патент РФ №2437110 опубл. 20.12.2011; Патент РФ №2584268 опубл. 20.05.2016; Патент РФ №2790790 опубл. 28.02.2023 и другие].
Например, способ [Шалыт Г.М. Определение мест повреждения в электрических сетях. - М.: Энергоиздат, 1982, с. 223], включает хранение в виде моделей информации о параметрах ЛЭП и электросети, получение оперативной информации о параметрах аварийного режима и номере режима сети, передачу оперативной информации о параметрах аварийного режима и номере режима сети для вычислений, вычисления расстояния до места повреждения и необходимой зоны обхода ЛЭП на основе параметров аварийного режима, номера режима сети и моделей.
Недостатки известных способов определения места повреждения линии электропередачи с использованием моделей связаны: с необходимостью формирования и хранения моделей ЛЭП, актуализации информации моделей при изменении параметров ЛЭП, проведения имитационных (или расчетных) экспериментов с моделями ЛЭП и других операций. Такие операции приводят к усложнению устройств, реализующих способы определения места повреждения линии электропередачи.
Наиболее близким техническим решением является способ определения места повреждения линии электропередачи [Патент РФ №2552388, МПК G01R 31/00, опубл. 10.06.2015, Бюл. №16], включающий хранение в виде моделей информации о параметрах ЛЭП и электросети, получение оперативной информации о параметрах аварийного режима и номере режима сети, передачу оперативной информации о параметрах аварийного режима и номере режима сети для вычислений, вычисления расстояния до повреждения и необходимой зоны обхода ЛЭП на основе параметров аварийного режима, номера режима сети и моделей, хранимую в виде моделей информацию о параметрах ЛЭП и электросети периодически корректируют на основании результатов активного зондирования ЛЭП.
Согласно предложения ЛЭП разбивают на участки, для каждого участка ЛЭП формируют собственный расчет расстояния до места повреждения, представляющий собой взвешенную сумму оценок расстояния до повреждения, определенных по совокупности известных способов определения места повреждения ЛЭП по параметрам аварийного режима, при этом производят выбор наиболее точного набора способов определения места повреждения и последовательности их применения, исходя из ошибок оценки расстояния для разных способов, а веса для суммирования получают по результатам моделирования повреждений ЛЭП и электросети.
Дополнительным недостатком известного способа, наряду с недостатками, присущими способам определения места повреждения линии электропередачи с использованием моделей, является применение активного зондирования, которое приводит к усложнению и существенному удорожанию соответствующего устройства, его реализующего.
Согласно национальному стандарту Российской Федерации п. 4 [ГОСТ Р 59550-2021 «Единая энергетическая система и изолированно работающие энергосистемы. Релейная защита и автоматика. Сбор, хранение и передача в диспетчерские центры в автоматическом режиме файлов с данными регистрации аварийных событий. Нормы и требования», разработан Акционерным обществом "Системный оператор Единой энергетической системы" (АО "СО ЕЭС"), введен 01.07.2021] для обеспечения возможности анализа субъектом оперативно-диспетчерского управления нарушений нормального режима в электрической части энергосистемы и технологических нарушений на объектах электроэнергетики, правильности функционирования устройств релейной защиты и автоматики (РЗА) должна быть обеспечена передача собственниками и иными законными владельцами объектов электроэнергетики в диспетчерские центры (ДЦ) с объектов электроэнергетики данных регистрации аварийных событий (РАС) со следующих устройств:
а) автономных регистраторов аварийных событий, установленных на объектах электроэнергетики и регистрирующих события на ЛЭП и оборудовании, отнесенных к объектам диспетчеризации;
б) микропроцессорных (МП) устройств релейной защиты (РЗ), сетевой автоматики (СА), противоаварийной автоматики (ПА) с функцией РАС, для которых расчет, выбор или согласование параметров настройки (уставок) и алгоритмов функционирования осуществляет субъект оперативно-диспетчерского управления;
в) специализированных устройств определения мест повреждения (ОМП), обеспечивающих ОМП на ЛЭП, отнесенных к объектам диспетчеризации;
г) МП устройств систем возбуждения синхронных генераторов (СВ) с функцией РАС в случае, если СВ отнесены к объектам диспетчеризации.
Дополнительно [п. 5.1, ГОСТ Р 59550-2021] на объектах электроэнергетики должен быть организован автоматический сбор на сервере РАС файлов с данными РАС с устройств.
Под сервером регистрации аварийных событий(сервер РАС) понимается отдельно выделенный компьютер или компьютер, входящий в состав автономных регистраторов аварийных событий, автоматизированной системы управления технологическими процессами объекта электроэнергетики или автоматизированной системы технологического управления, на котором собираются и хранятся данные регистрации аварийных событий с одного или более объектов электроэнергетики и с которого осуществляется передача данных регистрации аварийных событий в диспетчерские центры субъекта оперативно-диспетчерского управления.
В пункте 10 национального стандарта Российской Федерации [ГОСТ Р 58601 - 2019 «Единая энергетическая система и изолированно работающие энергосистемы. Оперативно-диспетчерское управление. Релейная защита и автоматика. Автономные регистраторы аварийных событий. Нормы и требования», разработан Акционерным обществом "Системный оператор Единой энергетической системы" (АО "СО ЕЭС"), введен 15.10.2019] определены требования к выбору параметров настройки РАС.
Параметры настройки (уставки) пуска автономного РАС выбираются собственником или иным законным владельцем объекта электроэнергетики, на котором установлен автономный РАС, и направляются на согласование в ДЦ в части ЛЭП и оборудования, которые являются объектами диспетчеризации, или расчет и выбор параметров настройки (уставок) и алгоритмов функционирования устройств РЗА, которых выполняет ДЦ.
Пуск автономных устройств РАС (устройств РЗА, ОМП) осуществляется по превышению заданных значений (уставок) напряжений и токов [Стандарт организации ПАО «Россети» СТО 34.01-4.1-002-2017 «Регистраторы аварийных событий. Технические требования. Дата введения: 15.08.2017]:
- фазных напряжений Ua, Ub, Uc, напряжений обратной U2 и нулевой последовательностей 3U0;
- фазных токов Ia, Ib, Ic, токов обратной I2 и нулевой последовательностей 3I0.
Важно отметить, что при повреждениях на высоковольтных ЛЭП, как правило, выполняются условия пуска сразу для нескольких устройствах РАС (РЗА, ОМП), расположенных как на одной, так и на разных подстанциях.
В устройствах РАС (РЗА, ОМП) должен быть реализован расчет расстояния до места повреждения. Такие устройства РАС (РЗА, ОМП) могут быть изготовлены как отечественными, так и зарубежными производителями, и имеют важную и свойственную для всех особенность, состоящую в том, что каждый из устройств РАС реализует собственный и единственный расчетный алгоритм для оценки расстояния до места повреждения ЛЭП, который задается производителем соответствующих устройств.
В состав алгоритмов ОМП по параметрам аварийного режима (ПАР) могут входить различные информационные признаки повреждения ЛЭП такие, как параметры комплексных сопротивлений, величины активной и реактивной мощностей, параметры токораспределения и другие. В зависимости от режимов и конфигурации электрической сети признаки «ведут себя» по-разному и могут уточнять или «загрублять» результат замера параметров токов и напряжений в различных условиях (множественные взаимоиндукции, неоднородности грунта и эквивалентного сопротивления земли, а также при пересечениях крупных водоемов, рек, горных участков и т.д.).
Формирование групповых (комплексных) алгоритмов ОМП, сочетающих достоинства и недостатки каждого из входящих в группу, может быть реализовано различными методами, как с использованием [Куликов А.Л., Обалин М.Д. Адаптивное определение места повреждения линии электропередачи по параметрам аварийного режима. Часть 1. - М.: НТФ «Энергопрогресс», 2019], так и без использования имитационного моделирования. При этом, как правило, применяется специальная вычислительная процедура, учитывающая характеристики точности каждого алгоритма и обеспечивающая общее минимальное количество алгоритмов для достижения требуемой точности.
Очевидно, что способы ОМП по ПАР, не предполагающие проведения имитационного моделирования, но обладающие высокой точностью, включают меньшее число вычислительных операций и проще, с точки зрения технической реализации. Они обладают большей эксплуатационной пригодностью, поскольку на ДЦ предприятий электрических сетей, или ДЦ филиалов АО «СО ЕЭС», как правило, отсутствуют средства и возможности по проведению имитационного моделирования.
Задача изобретения - упрощение способа определения места повреждения линий электропередачи при сохранении его высокой точности.
Поставленная задача достигается способом определения места повреждения линии электропередачи, включающим хранение информации о параметрах ЛЭП и электросети, получение оперативной информации о параметрах аварийного режима, передачу оперативной информации о параметрах аварийного режима для вычислений, вычисление расстояния до повреждения на основе параметров аварийного режима, использование совокупности известных способов определения места повреждения ЛЭП по параметрам аварийного режима, при этом производят выбор наиболее точного набора способов определения места повреждения.
Согласно предложения хранение информации о параметрах ЛЭП и электросети осуществляют в блоке памяти устройства для реализации способа определения места повреждения линии электропередачи, используют при реализации способа определения места повреждения линии электропередачи результаты промежуточных вычислений устройств, регистрирующих аварийные события и установленных по меньшей мере на одной подстанции, передают оперативную информацию о параметрах аварийного режима и результаты промежуточных вычислений устройств, регистрирующих аварийные события и установленных по меньшей мере на одной подстанции, в вычислительный блок устройства, реализующего способ, к информационному входу которого подключают выход блока памяти, рассчитывают расстояние до места повреждения l с использованием метода наименьших квадратов и результатов промежуточных вычислений устройств, регистрирующих аварийные события, по выражению

где 
x1i и x2i - соответственно числитель и знаменатель выражения для расчета расстояния li до места повреждения для i-го способа определения места повреждения (i=1, …, N), выбранного для реализации способа определения места повреждения линии электропередачи и используемого в одном из устройств, регистрирующих аварийные события и установленных по меньшей мере на одной подстанции,
Выбор набора из N способов определения места повреждения осуществляют, исходя из минимальных ошибок определения места повреждения, полученных по их реализации с использованием осциллограмм аварийных событий, зарегистрированных при реальных повреждениях линии электропередачи, выдают результаты определения места повреждения в виде значения расстояния l до места повреждения для отображения в блок индикации устройства, реализующего способ определения места повреждения линии электропередачи.
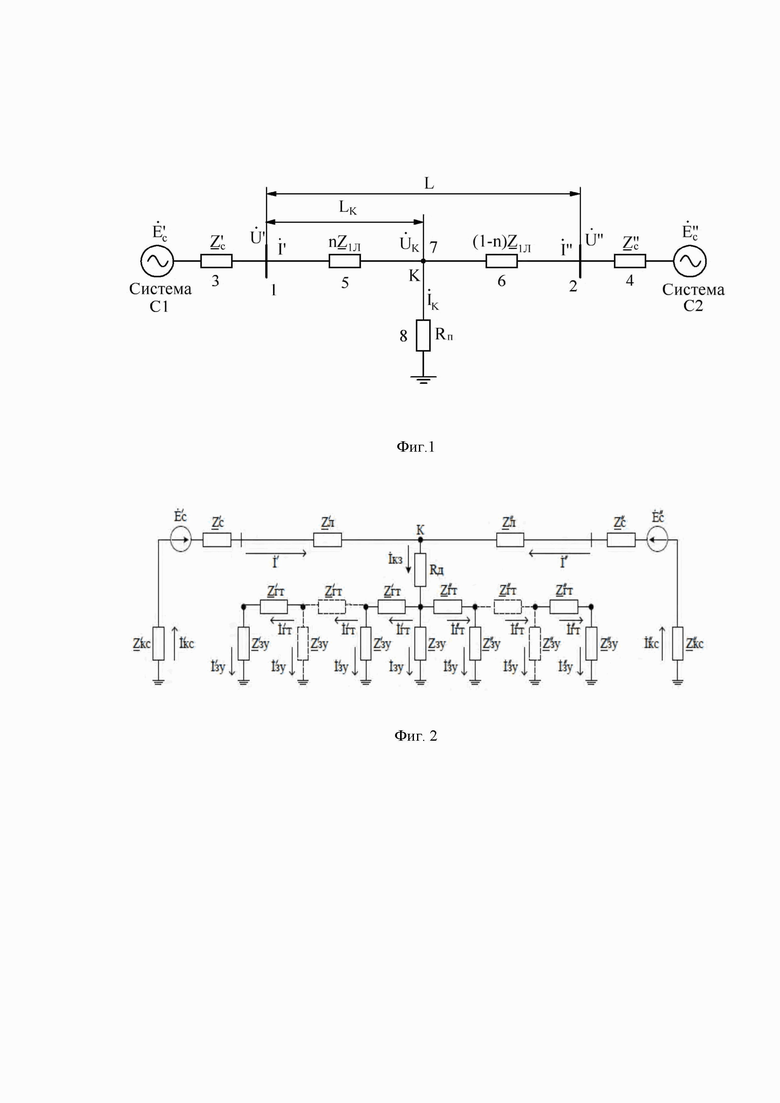
На фиг. 1 представлена схема замещения поврежденной воздушной линии электропередачи с двухсторонним питанием в режиме короткого замыкания (КЗ).
Воздушная линия электропередачи (фиг. 1) имеет длину L и соединяет шины 1 и 2 двух систем С1 и С2, системы имеют соответствующие собственные сопротивления 3 и 4. На расстоянии LК от шины 1 показано КЗ на ЛЭП в точке К (7), а также сопротивления ЛЭП слева 5 и справа 6 от места КЗ. Короткому замыканию на ВЛЭП характерно активное сопротивление повреждениями Rп (8).
На фиг. 2 изображена эквивалентная схема замещения ЛЭП с заземленным наглухо грозотросом (ГТ) на концевых и анкерных опорах и с пробитым искровыми промежутками (ИП) в месте КЗ.
На фиг. 2 в дополнение к фиг. 1 введены следующие обозначения: 
 - соответственно токи и сопротивления заземляющих устройств систем С1 и С2;
- соответственно токи и сопротивления заземляющих устройств систем С1 и С2; 
 - соответственно токи и сопротивления ГТ;
- соответственно токи и сопротивления ГТ;  -соответственно токи и сопротивления заземляющих устройств опор;
-соответственно токи и сопротивления заземляющих устройств опор;  - сопротивление заземляющего устройства опоры в месте КЗ.
- сопротивление заземляющего устройства опоры в месте КЗ.
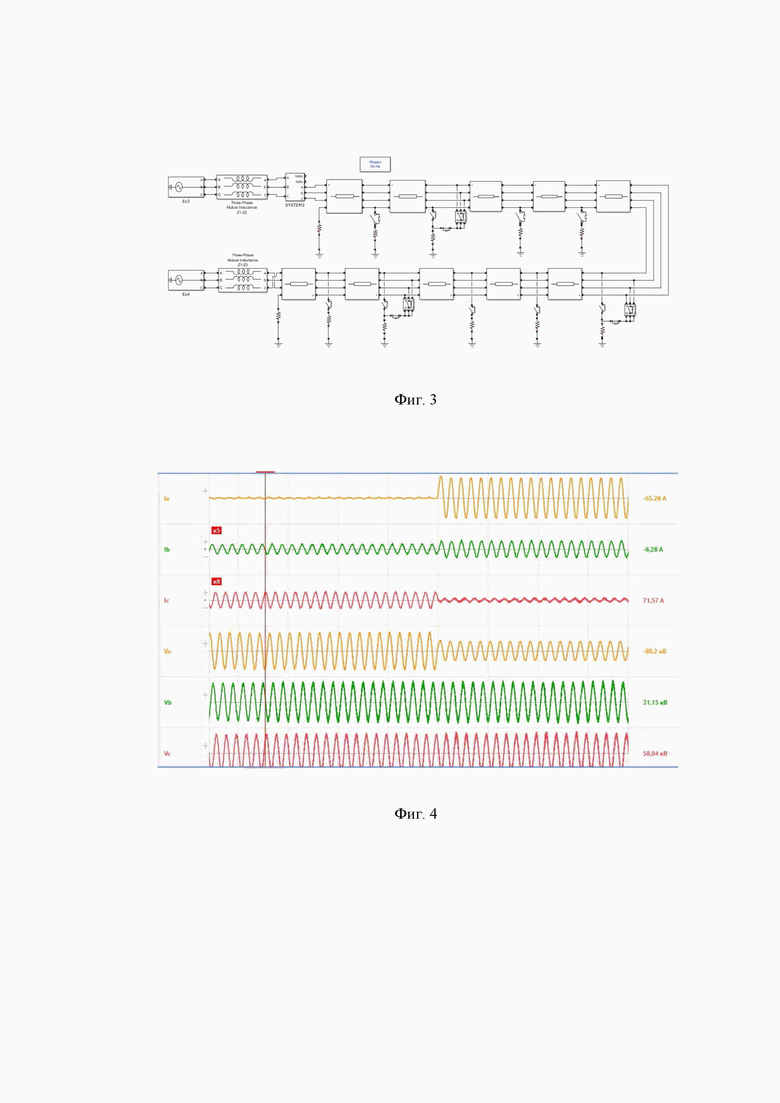
На фиг. 3 представлена модель ЛЭП 110 кВ в программном комплексе MATLAB.
Фиг. 4 иллюстрирует осциллограммы токов и напряжений при КЗ ЛЭП на фазе А и расстоянии 20 км от шины 1 (фиг. 1).
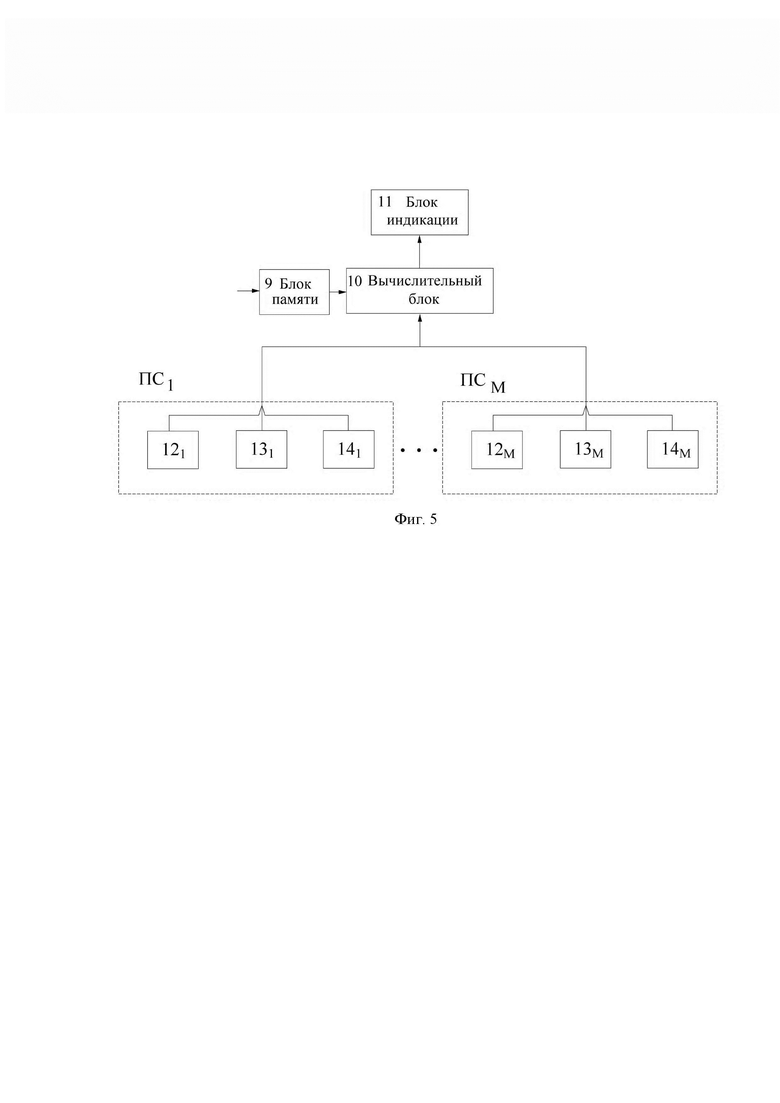
На фиг. 5 представлена структурная схема устройства, реализующего способ определения места повреждения линии электропередачи.
Устройство (фиг. 5) содержит: блок 9 памяти; вычислительный блок 10; блок индикации 11; устройства регистрации аварийных событий (РАС) 121…12М; устройства определения мест повреждения (ОМП) ЛЭП 131…13М; устройства релейной защиты и автоматики (РЗА) 141…14М. Устройства РАС, ОМП, РЗА расположены на подстанциях (ПС) под номером 1…М.
Способ определения места повреждения линий электропередачи реализуется следующим образом.
Реализацию предлагаемого способа ОМП, использующего группу алгоритмов расчета расстояния до места повреждения, следует осуществлять с учетом особенностей каждой отдельной процедуры ОМП, например, когда погрешности ОМП могут иметь разный знак и компенсировать друг друга. При этом выбор алгоритмов ОМП, входящих в группу применительно к конкретной ЛЭП, целесообразно выбирать с учетом эксплуатационных статистических данных об ошибках ОМП для каждого из алгоритмов, входящих в группу. Для этого перед реализацией способа необходимо провести серию расчетных экспериментов с каждым алгоритмом из группы и осциллограммами аварийных событий, зафиксированными при реальных повреждениях на анализируемой ЛЭП.
Эффективность группового алгоритма состоит не только в том, что в результате объединения происходит смещение расчетной точки ОМП в сторону истинного месторасположения повреждения, но и уменьшается дисперсия (степень разброса) групповой оценки расстояния до повреждения. Такое качество позволяет сократить зону обхода ЛЭП и в конечном итоге ускорить ликвидацию аварийной ситуации. Следует отметить, что для односторонних алгоритмов ОМП ЛЭП характерно увеличение ошибки при повреждениях в конце линии [Аржанников. Е.А. Определение места короткого замыкания на высоковольтных линиях электропередачи / Е.А. Аржанников. В.Ю. Лукоянов. М.Ш. Мисриханов; под ред. В.А. Шуина. - М: Энергоатомиздат. 2003]. В таких условиях именно групповой алгоритм может обеспечить требуемую для эксплуатации точность ОМП.
Реализацию способа ОМП ЛЭП рассмотрим с учетом поясняющей схемы замещения поврежденной ЛЭП (фиг. 1).
Для определения эффективности групповых алгоритмов ОМП ЛЭП, а также проведения имитационного моделирования были выбраны алгоритмы: основанный на замере реактивного сопротивления; Takagi; Аржанникова; Wiszniewski (табл. 1).
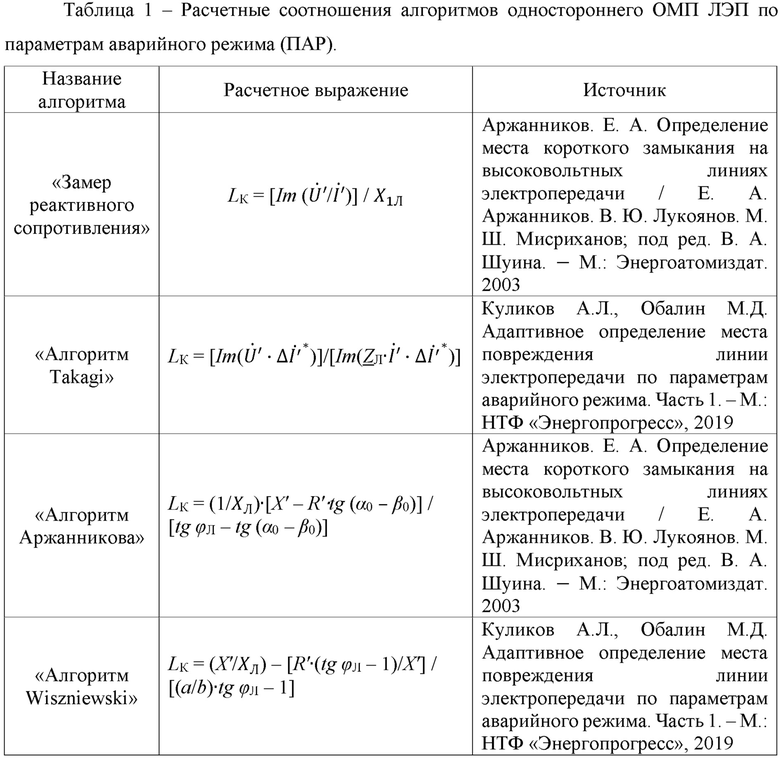
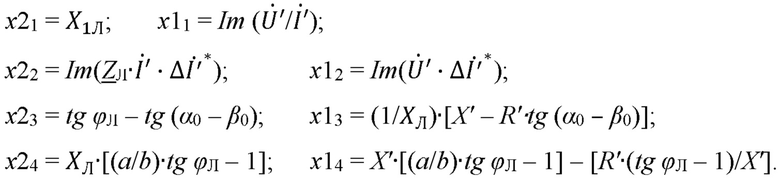
В таблице 1 введены следующие обозначения величин, входящих в расчетные соотношения:  - комплексное напряжение и ток, зарегистрированные при КЗ со стороны шины 1 (фиг. 1); Х1Л и ХЛ - соответственно удельное и полное реактивные сопротивления ЛЭП;
- комплексное напряжение и ток, зарегистрированные при КЗ со стороны шины 1 (фиг. 1); Х1Л и ХЛ - соответственно удельное и полное реактивные сопротивления ЛЭП;  - комплексно сопряженный чисто аварийный ток со стороны шины 1 (фиг. 1), равный разности между током при КЗ и током в доаварийном (нагрузочном) режиме
- комплексно сопряженный чисто аварийный ток со стороны шины 1 (фиг. 1), равный разности между током при КЗ и током в доаварийном (нагрузочном) режиме  R' и X' - измеренные со стороны шины 1 (фиг. 1) активное и индуктивное сопротивления; ϕЛ=arg(ХЛ/RЛ), где RЛ - активное сопротивление ЛЭП;
R' и X' - измеренные со стороны шины 1 (фиг. 1) активное и индуктивное сопротивления; ϕЛ=arg(ХЛ/RЛ), где RЛ - активное сопротивление ЛЭП;  где
где  - соответственно комплексные токи нулевой последовательности со стороны шины 1 (фиг. 1) и в месте повреждения;
- соответственно комплексные токи нулевой последовательности со стороны шины 1 (фиг. 1) и в месте повреждения;  - удельные сопротивления соответственно нулевой и прямой последовательностей ЛЭП;
- удельные сопротивления соответственно нулевой и прямой последовательностей ЛЭП;  - комплексный чисто аварийный ток со стороны шины 1 (фиг. 1).
- комплексный чисто аварийный ток со стороны шины 1 (фиг. 1).
Анализируя расчетные соотношения, приведенные в табл. 1, можно прийти к выводу, что они отвечают следующей форме

где x1 и х2 - соответственно числитель и знаменатель расчетного соотношения.
Используя выражение (1), для N различных методов ОМП ЛЭП (i=1, …, N) можно записать следующую систему уравнений
где l - расстояние до места повреждения ЛЭП.
Например, применительно к расчетным соотношениям, приведенным в табл.1 можно принять, что N=4, а составляющие равенств (2), (3) принимают вид
Как было указано ранее, в устройствах РАС (РЗА, ОМП) реализуется свой собственный расчет расстояния до места повреждения. Такие устройства РАС (РЗА, ОМП) могут быть изготовлены как отечественными, так и зарубежными производителями и располагаться на различных подстанциях. При повреждении на ЛЭП условия пуска регистрации аварийных событий и расчета расстояния до места повреждения, как правило, соблюдаются для нескольких устройств РАС (РЗА, ОМП), в том числе расположенных на нескольких подстанциях. Целесообразно использовать ресурс промежуточных вычислений таких устройств для повышения точности ОМП ЛЭП, а групповой алгоритм ОМП формировать на основе выражений (2), (3) с последующим применением метода наименьших квадратов.
Таким образом групповой алгоритм обеспечивает расчет расстояния до места повреждения l с использованием метода наименьших квадратов и результатов промежуточных вычислений устройств, регистрирующих аварийные события, по выражению

где 
x1i и x2i - соответственно числитель и знаменатель выражения для расчета расстояния li до места повреждения для i-го способа определения места повреждения (i=1, …, N), выбранного для реализации способа определения места повреждения линии электропередачи и используемого в одном из устройств, регистрирующих аварийные события и установленных по меньшей мере на одной подстанции.
Эквивалентная схема замещения ЛЭП 110 кВ с грозозащитным тросом (ГТ) показана на фиг. 2 [Висящев А.Н., Пленков Э.Р., Федосов Д.С. Оценка величины и характера переходного сопротивления в месте короткого замыкания на воздушных линиях электропередачи высокого напряжения // Интеллектуальная Электротехника. 2023 №2 С. 78-89. DOI: 10.46960/2658-6754_2023_2_78]. Для оценки ошибок ОМП по алгоритмам (табл. 1) и групповому алгоритму ЛЭП 110 кВ (фиг. 2) была разделена на 10 равных участков, соответствующих анкерным пролетам и имеет следующие данные: протяженность 100 км, марка провода АС 150/24, тип промежуточных опор П110-3, грозотрос марки С-70, который по всей длине на опорах заземлен через ИП, а на концевых опорах заземлен наглухо.
Сопротивление системы в начале и конце ЛЭП задавались равными  Сопротивление электрической дуги в месте КЗ и контур заземлений опор приняты чисто активными: RД=5 Ом и
Сопротивление электрической дуги в месте КЗ и контур заземлений опор приняты чисто активными: RД=5 Ом и  соответственно. Емкостные проводимости ВЛ не учитывались.
соответственно. Емкостные проводимости ВЛ не учитывались.
Расчеты матрицы погонных продольных сопротивлений ЛЭП в фазных координатах привели к результатам:

Для имитации неоднородностей удельных параметров ЛЭП вводились их изменения. Например, считалось, что первые 40 км ЛЭП со стороны шины 1 (фиг. 1) имеют параметры завышенные на 10% по сравнению с паспортными данными, а параметры ЛЭП на следующих 30 км - заниженные на 10%, на оставшихся 30 км параметры изменяются в пределах ±2%.
Модель ЛЭП 110 кВ (фиг. 2), выполненная в программном комплексе MATLAB представлена на фиг. 3. С использованием имитационной модели (фиг. 3) была проведена серия экспериментов, соответствующих однофазным КЗ на расстоянии 20 км, 50 км, 80 км от начала (шина 1, фиг. 1) ЛЭП для следующих вариантов заземления ГТ:
1. ГТ на концевых опорах заземлен наглухо, на остальных опорах заземлен через искровые промежутки (ИП), при этом в месте КЗ не пробит ИП (что соответствует изолированному ГТ по всей длине ЛЭП);
2. ГТ на концевых опорах заземлен наглухо, на остальных опорах заземлен через ИП, при этом в месте КЗ пробит ИП;
3. ГТ на концевых и анкерных опорах заземлен наглухо, при этом в месте КЗ пробит ИП (или КЗ на анкерной опоре). Такое состояние имитационной модели ЛЭП также соответствует состоянию, когда ГТ по всей длине ЛЭП заземлен наглухо.
Согласно эквивалентной схеме (фиг. 2), переходное сопротивление в месте КЗ определяется по выражению:
где  - эквивалентное сопротивление ГТ и заземляющих устройств опор относительно точки КЗ.
- эквивалентное сопротивление ГТ и заземляющих устройств опор относительно точки КЗ.
В таблице 2 представлены результаты расчетов переходного сопротивления в трех точках КЗ на ЛЭП при различных вариантах заземления ГТ, а также представлены результаты расчетов расстояния до точки КЗ по различным алгоритмами ОМП.
В качестве примера на фиг. 4 представлены осциллограммы токов и напряжений при однофазном КЗ (фазы А) в точке 20 км. Осциллограммы построены с использованием программы для просмотра файлов осциллограмм аварийных событий Waves «НИИ ЭКРА».

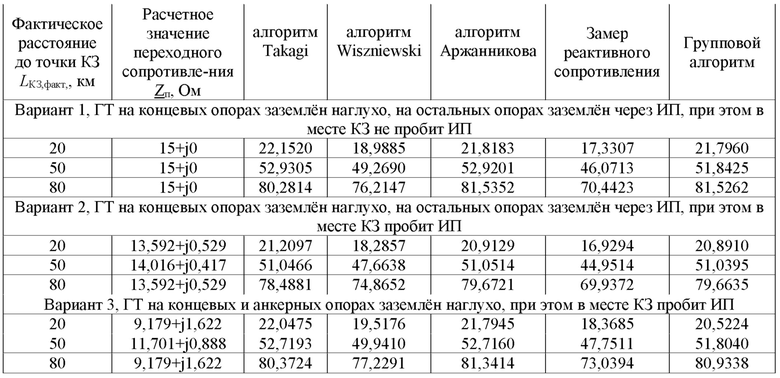
Анализ результатов, представленных в таблице 2, показывает, что групповой алгоритм ОМП ЛЭП обладает повышенной точностью, позволяет компенсировать ошибки методов одностороннего ОМП, в том числе при неоднородном сопротивлении ЛЭП и в условиях различного (в том числе имеющего реактивную составляющую) сопротивления повреждения.
Структурная схема устройства, реализующее предлагаемый способ определения места повреждения линий электропередачи, представлена на фиг. 5. Устройство (фиг. 5) функционирует следующим образом.
Перед началом функционирования устройства (фиг. 5) производится выбор алгоритмов ОМП ЛЭП, которые будут входить в состав группового алгоритма. Отбор таких алгоритмов осуществляется, исходя из минимальных ошибок ОМП, полученных по их реализации с использованием осциллограмм аварийных событий, зарегистрированных при реальных повреждениях и полученных в процессе эксплуатации ЛЭП.
В блок памяти 9 устройства (фиг. 5) вносится информация о параметрах ЛЭП и электросети, необходимых для реализации группового алгоритма ОМП. Эти данные с выхода блока 9 памяти выдаются на информационный вход вычислительного блока 10 для осуществления операций цифровой обработки информации. Вычислительный блок 10 может быть выполнен на основе сервера РАС, располагаемого на диспетчерском центре предприятия электрических сетей, на балансе которого находится ЛЭП.
Сервер РАС представляет собой [ГОСТ Р 59550-2021 «Единая энергетическая система и изолированно работающие энергосистемы. Релейная защита и автоматика. Сбор, хранение и передача в диспетчерские центры в автоматическом режиме файлов с данными регистрации аварийных событий. Нормы и требования», разработан Акционерным обществом "Системный оператор Единой энергетической системы" (АО "СО ЕЭС"), введен 01.07.2021] отдельно выделенный компьютер или компьютер, входящий в состав автономных регистраторов аварийных событий, автоматизированной системы управления технологическими процессами объекта электроэнергетики или автоматизированной системы технологического управления, на котором собираются и хранятся данные регистрации аварийных событий с одного или более объектов электроэнергетики и с которого осуществляется передача данных регистрации аварийных событий в диспетчерские центры субъекта оперативно-диспетчерского управления.
Для выдачи информации о результатах ОМП ЛЭП вычислительный блок 10 подключается к блоку индикации 11, который может быть выполнен с использованием средств отображения информации, находящихся на диспетчерском центре предприятия электрических сетей. К таким средствам могут относится, например, автоматизированные рабочие места (АРМ) диспетчерского персонала, плазменные (жидкокристаллические, проекционные и другие) щиты, входящие в состав оперативно-информационных комплексов (ОИК), SCADA-систем и другие средства отображения информации.
При возникновении повреждения на ЛЭП устройствами РАС 12, ОМП 13, РЗА 14, расположенными на подстанциях (ПС), производится регистрация аварийных событий и расчет расстояния до места повреждения ЛЭП. Следует отметить, что количество, а также ситуационное расположение на ПС устройств РАС 12, ОМП 13, РЗА 14, регистрирующих аварийные события, зависит от конфигурации электрической сети, а также схемно-режимной ситуации и определяется условиями пуска устройств РАС 12, ОМП 13, РЗА 14. В последующем информация от устройств РАС 12, ОМП 13, РЗА 14, в которых произошла регистрация аварийных событий, передается в вычислительный блок 10. В состав этой информации входят результаты промежуточных вычислений по алгоритмам ОМП ЛЭП, содержащимся и характерным каждому из устройств РАС 12, ОМП 13, РЗА 14.
В вычислительном блоке 10 производится расчет расстояния до места повреждения ЛЭП в соответствии с групповым алгоритмов по выражению (4), причем состав величин, входящих в выражение (4), определяется выбранными алгоритмами ОМП ЛЭП, которые входят в состав группового алгоритма.
Результаты расчета расстояния до места повреждения по групповому алгоритму передаются из блока 10 вычислений в блок 11 индикации для использования в процессе ликвидации повреждения ЛЭП.
Таким образом, применение предложенного способа ОМП ЛЭП на основе группового алгоритма не требует использования активного зондирования и имитационного моделирования, а также обеспечивает достижение задачи изобретения - упрощение способа определения места повреждения линий электропередачи при сохранении его высокой точности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения места повреждения на воздушной линии электропередачи, оборудованной грозозащитным тросом | 2024 |
|
RU2834732C1 |
| Способ определения места повреждения на воздушной линии электропередачи по замерам токов с двух ее концов | 2023 |
|
RU2828439C1 |
| Способ определения места повреждения на воздушной линии электропередачи по замерам токов с двух ее концов | 2023 |
|
RU2823691C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА ПОВРЕЖДЕНИЯ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ | 2010 |
|
RU2437110C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА РЕГИСТРАЦИИ, СБОРА, ОБРАБОТКИ, ХРАНЕНИЯ И ПРОСМОТРА ОПЕРАТОРОМ ЭНЕРГОСИСТЕМЫ АВАРИЙНОЙ ОСЦИЛЛОГРАФИЧЕСКОЙ ИНФОРМАЦИИ, ПОЛУЧЕННОЙ ОТ РАЗНОРОДНЫХ КОНТРОЛИРУЕМЫХ ОБЪЕКТОВ ЭЛЕКТРОЭНЕРГЕТИКИ, ВХОДЯЩИХ В ЭНЕРГОСИСТЕМУ | 2014 |
|
RU2589400C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА ПОВРЕЖДЕНИЯ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ | 2013 |
|
RU2552388C2 |
| Способ определения места повреждения на воздушной линии электропередачи при замерах с двух ее концов | 2023 |
|
RU2816200C1 |
| Способ определения места короткого замыкания на воздушной линии электропередачи по замерам с двух ее концов | 2022 |
|
RU2801352C1 |
| Способ определения места короткого замыкания на воздушной линии электропередачи при несинхронизированных замерах с двух ее концов | 2022 |
|
RU2793555C1 |
| СПОСОБ ИНТЕРВАЛЬНОГО ОПРЕДЕЛЕНИЯ МЕСТА ПОВРЕЖДЕНИЯ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ | 2019 |
|
RU2720949C1 |
Изобретение относится к электротехнике и предназначено для реализации в устройствах определения места повреждения линий электропередачи (ЛЭП), а также в измерительных органах дистанционной защиты. Технический результат: упрощение определения места повреждения линий электропередачи при сохранении высокой точности. Сущность: осуществляют выбор набора из N способов определения места повреждения, исходя из минимальных ошибок определения места повреждения, полученных по их реализации с использованием моделирования и осциллограмм аварийных событий, зарегистрированных при реальных повреждениях. Получают оперативную информацию о параметрах аварийного режима и результаты промежуточных вычислений расстояний терминалов, регистрирующих аварийные события и установленных по меньшей мере на одной подстанции. Рассчитывают расстояние до места повреждения l с использованием метода наименьших квадратов и результатов промежуточных вычислений терминалов, регистрирующих аварийные события. 5 ил., 2 табл.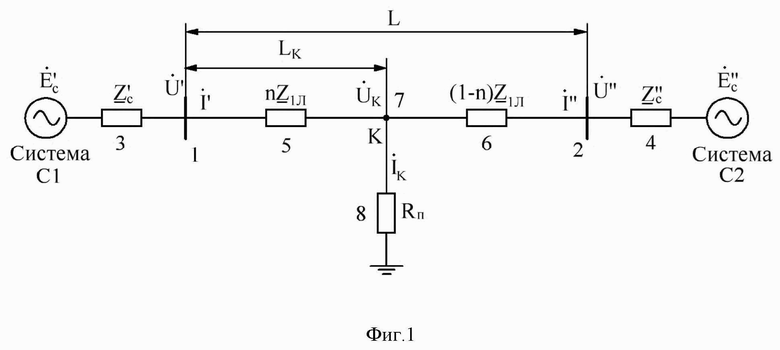
Способ определения места повреждения линии электропередачи, включающий хранение информации о параметрах ЛЭП и электросети, получение оперативной информации о параметрах аварийного режима, в состав которых входят комплексные и действующие значения аварийных токов и напряжений, передачу оперативной информации о параметрах аварийного режима для вычислений, вычисление расстояния до повреждения на основе параметров аварийного режима, использование совокупности известных способов определения места повреждения ЛЭП по параметрам аварийного режима, при этом производят выбор наиболее точных способов определения места повреждения, отличающийся тем, что хранение информации о параметрах ЛЭП и электросети осуществляют в блоке памяти устройства для реализации способа определения места повреждения линии электропередачи, выход блока памяти подключают к информационному входу вычислительного блока устройства, используют при реализации способа определения места повреждения линии электропередачи результаты промежуточных вычислений терминалов, регистрирующих аварийные события и установленных по меньшей мере на одной подстанции, передают оперативную информацию о параметрах аварийного режима и результаты промежуточных вычислений терминалов, регистрирующих аварийные события и установленных по меньшей мере на одной подстанции, в вычислительный блок устройства, реализующего способ, рассчитывают расстояние до места повреждения l с использованием метода наименьших квадратов и результатов промежуточных вычислений терминалов, регистрирующих аварийные события, по выражению

где 
x1i и x2i соответственно числитель и знаменатель выражения для расчета расстояния li до места повреждения для i-го способа определения места повреждения (i=1,…, N), выбранного для реализации способа определения места повреждения линии электропередачи и используемого в одном из терминалов, регистрирующих аварийные события и установленных по меньшей мере на одной подстанции, вычисленные значения x1i и x2i передают в вычислительный блок устройства, реализующего способ, в качестве результатов промежуточных вычислений терминалов, регистрирующих аварийные события, перед реализацией способа осуществляют выбор набора из N способов определения места повреждения, исходя из минимальных ошибок определения места повреждения, полученных по их реализации с использованием моделирования и осциллограмм аварийных событий, зарегистрированных при реальных повреждениях линии электропередачи, выдают результаты определения места повреждения в виде значения расстояния l до места повреждения для отображения в блок индикации устройства, реализующего способ определения места повреждения линии электропередачи.
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА ПОВРЕЖДЕНИЯ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ | 2010 |
|
RU2437110C1 |
| Способ определения места короткого замыкания на воздушной линии электропередачи при несинхронизированных замерах с двух ее концов | 2023 |
|
RU2801438C1 |
| Способ определения места короткого замыкания на воздушной линии электропередачи при несинхронизированных замерах с двух ее концов | 2022 |
|
RU2793555C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА ПОВРЕЖДЕНИЯ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ | 2013 |
|
RU2552388C2 |
| CN 104297632 B, 15.02.2017 | |||
| CN 104155574 B, 15.12.2017. | |||

