Область техники
Объектом изобретения является модуль навигационной коммуникации (МНК) для оперативного обмена информацией, в первую очередь, навигационной, между всеми участниками воздушного движения с целью обеспечения безопасности полетов.
МНК является миниатюрным радиоэлектронным бортовым оборудованием в виде отдельной платы и может быть использован для оснащения летательных аппаратов (ЛА) любого типа и класса. Располагается в произвольном месте ЛА и используется в различных режимах движения: пилотируемом и беспилотном, под управлением автопилота, удаленного оператора или бортового компьютера. Для обмена навигационными сигналами с модулями других участников движения выходной кабель модуля подключается к антеннам, расположенным на внешней поверхности ЛА.
Уровень техники
Использование радиочастотной связи для информационного обмена в авиации обусловлено ее всепогодностью и широкой диаграммой направленности. Развитие стандартов цифровой высокоскоростной беспроводной связи открыло возможности существенно повысить информативность потоков данных, однако остаются проблемы интерференции сигналов при значительной плотности источников излучения.
Из уровня техники известно устройство связи, адаптированное для связи в системе связи (патент WO 2018182708 A1, опубл. 04.10.2018), причем устройство связи содержит: приемник, контроллер связи и передатчик. Приемник предназначен для приема информации от одного или более беспроводных устройств с использованием технологии связи «транспортное средство со всем остальным» (V2X). Контроллер сконфигурирован для обработки принятой информации, полученной в результате связи по указанной технологии с одним или более абонентами, и генерации системной информации после обработки полученных сигналов. Передатчик предназначен для передачи системной информации по меньшей мере одному или более абонентам с использованием второй технологии связи, отличной от V2X (сотовой, 3GPP или 5G).
Основной недостаток подобного подхода заключается в отсутствии алгоритмов и даже концепции разделения сигналов, передаваемых одновременно несколькими участниками воздушного движения в зоне уверенного приема. Учитывая ограниченность радиочастотного диапазона, данный способ применим для передачи значительных объемов информации только в условиях низкой плотности воздушного движения и сеансового режима связи. При организации обмена коммуникационной информацией для обеспечения безопасности полетов важен не столько объем передаваемых данных, сколько оперативность их доставки и надежность расшифровки.
Из уровня техники известен способ организации обмена навигационной информацией между участниками движения при высокой плотности потоков за счет разделения сигналов во времени (патент WO 2022231467 A1, опубл. 03.11.2022). Коммуникационно-навигационная система (КНС) содержит бортовые приемопередающие модули, предназначенные для передачи локационного сигнала, а также сбора и расшифровки локационных сигналов всех транспортных средств, находящихся в зоне радиосвязи и оборудованных ее модулями. Локационный сигнал содержит идентификационную и навигационную информацию, позволяющую однозначно идентифицировать транспортное средство, установить его положение и параметры траектории для выявления угроз безопасности других участников движения. В состав КНС также входят центры управления транспортными потоками на базе распределенной по зоне ответственности сети стационарных модулей. Данные модули выполнены с возможностью генерации позиционных сигналов, обеспечивающих формирование локальной системы позиционирования с помощью методов трилатерации.
Передача информации осуществляется от каждого транспортного средства всем находящимся в зоне уверенного приема, на одной частоте в выделенном для локационных сигналов диапазоне радиочастот. Компактная кодировка идентификационной, навигационной и контрольной информации обеспечивает короткую длительность локационного сигнала в микросекундном диапазоне. Выбор интервала между локационными сигналами одного транспортного средства, находящегося в диапазоне единиц или долей гигагерц, определяется скоростью изменения обстановки, что обеспечивает оперативное управление транспортными потоками.
Недостатком упомянутого подхода является отсутствие технических средств для организации обмена навигационной информацией между участниками движения. Особенно актуальна эта проблема в области воздушного транспорта, где активное развитие беспилотных систем сдерживается отсутствием устройств эффективного мониторинга пространства. В отличие от автомобильного движения, осуществляемого по размеченным и оборудованным дорогам на плоскости, контроль окружающего пространства в авиации необходимо осуществлять во всех направлениях. Это крайне сложно осуществить с помощью средств видеомониторинга, особенно в сложных погодных условиях.
Раскрытие сущности изобретения
МНК является техническим средством реализации способа, описанного в патенте WO 2022231467 A1, опубликованного 03.11.2022, в части бортового приемопередающего модуля, обеспечивающего также сбор и обработку информации. Для информационного обмена с радиоэлектронным бортовым оборудованием, в частности с системами позиционирования и управления ЛА, МНК подключается к бортовой сети. При установке МНК на ЛА осуществляется прошивка постоянной памяти модуля, в которую записывается класс аппарата и его регистрационный номер. На базе этих сведений формируется идентификационный код навигационного сигнала. Также в память модуля заносится значение периода генерации локационного сигнала.
МНК переходит в рабочее состояние при включении бортового питания после получения навигационной и полетной информации от бортового оборудования, что осуществляется до взлета ЛА. В рабочем состоянии модуль формирует и в выделенной полосе радиочастот с помощью передающей бортовой антенны излучает локационный сигнал, содержащий информацию о положении и векторе движения аппарата, на борту которого установлен. В промежутке между генерируемыми сигналами МНК на приемную антенну принимает локационные сигналы других ЛА, находящихся в зоне уверенного приема, и передает бортовому оборудованию информацию о потенциальных угрозах безопасности. В случае удаленного управления дроном наземные вычислительные средства производят расчет рисков пересечения траекторий и при необходимости информируют оператора с указанием рекомендаций по уклонению от столкновений.
Помимо информации о положении и скорости ЛА локационный сигнал содержит идентификационные данные, сведения о классе воздушного судна и уровне приоритета, а также контрольную сумму для контроля корректности дешифровки кода. Для упрощения анализа рисков столкновений он также может содержать данные о режиме пилотирования и совершаемом маневре (перестроении по высоте или азимуту). Информацию об уровне приоритета и режиме пилотирования (полетные данные) МНК получает от бортового оборудования. Расчет параметров совершаемого маневра и экстраполяция данных с датчиков систем глобального (или локального) позиционирования о положении ЛА и векторе его скорости на момент генерации сигнала осуществляется процессором модуля. Вычисление контрольной суммы сообщения производится формирователем кода модуля.
Идентификационные данные в локационном сигнале передаются с целью регистрации ЛА наземными средствами мониторинга, например, в зонах с ограничениями воздушного движения. Информация о классе ЛА и уровне приоритета передается для определения, кто из участников движения обязан производить маневр уклонения в случае потенциально опасной ситуации. Класс воздушного судна также определяет требования к безопасной дистанции сближения при расчете маневра уклонения. Информация о режиме пилотирования и совершаемом маневре позволяет оценивать предсказуемость действий соседних участников движения и вероятность возникновения нештатной ситуации.
Мощность передатчика МНК и чувствительность приемников выбирается для каждого типа ЛА таким образом, чтобы обеспечить рабочую дальность уверенного приема, достаточную для совершения маневра уклонения после расчета траекторий. Определение размеров зоны уверенного приема производится в предположении пересечения с ЛА такого же класса, исходя из крейсерской скорости и частоты повторения навигационного сигнала. Для этого устанавливается допустимый диапазон числа принятых сигналов за время сближения ЛА на крейсерской скорости с предельной дальности уверенного приема до момента пересечения траекторий (например, от 10 до 20). Наряду с количеством сигналов за время сближения регламентируется минимальная дальность зоны приема (для дронов) и максимальная (для самолетов).
После установки МНК на борт в постоянное запоминающее устройство (ПЗУ) заносится информация о классе ЛА и идентификационные данные (регистрационный номер). Если частота следования локационных сигналов не вычисляется на базе идентификационных данных, данная информация также заносится в ПЗУ модуля.
В режиме полета после запуска двигателя перед взлетом в ПЗУ модуля из системы управления полетом загружаются полетные данные (уровень приоритета и режим пилотирования). В оперативное запоминающее устройство (ОЗУ) модуля с заданной периодичностью начинают поступать навигационные данные (положение и скорость ЛА) с бортовой навигационной системы. Запускается генератор синхроимпульсов, формируется код и генерируется локационный сигнал, принимаются локационные сигналы других участников движения, информация о которых с дешифратора кода передается в систему управления полетом для принятия решения о безопасности взлета.
Во время полета процессор МНК осуществляет расчет положения ЛА и вектора скорости его движения на момент генерации локационного сигнала, для чего запрашивает данные о времени синхроимпульса и навигационные данные из ОЗУ модуля. С этой целью в ОЗУ сохраняются данные, полученные от бортовой навигационной системы за несколько последних циклов расчета координат по данным датчиков глобальных или локальных навигационных систем. При необходимости осуществляется расчет данных о выполняемом маневре для включения полученных результатов в код локационного сигнала. Генератор локационного сигнала по синхроимпульсу осуществляет модуляцию несущей частоты кодом локационного сигнала.
Генератор синхроимпульсов также формирует импульс блокировки приема для защиты входных цепей приемника от сигнала передатчика на временной интервал, превышающий длительность импульса локационного сигнала. Дешифратор кода, приняв локационный сигнал ЛА, находящегося в зоне приема радиосигнала, проверяет соответствие кода контрольной сумме сообщения. В случае совпадения суммы битов с контрольной суммой сообщение считается принятым, полученная информация в формате, удобном для расчета траекторий, передается в систему управления полетом.
Сведения, повторяющиеся в локационных сигналах (класс ЛА, регистрационный номер, режим пилотирования и др.), передаются только при первом успешном приеме сообщения. В дальнейшем в систему управления полетом передается только порядковый номер обнаруженного ЛА, присвоенный ему при первом успешном приеме локационного сигнала. В случае приема сообщения, которое не удалось расшифровать (с некорректной контрольной суммой), в систему управления полетом передается информация о появлении нерасшифрованного сообщения, его интенсивности, длительности и времени приема.
Краткое описание чертежей
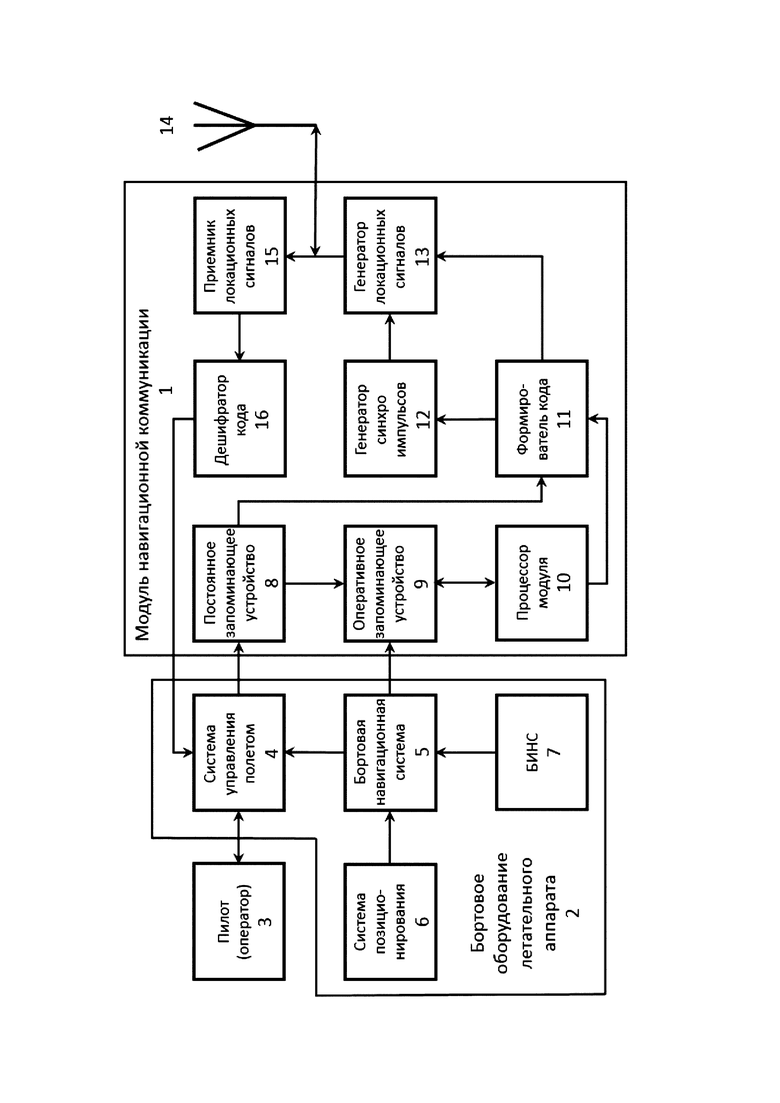
Сущность технического решения поясняется фигурой, на которой представлена блок-схема МНК 1 с подключением к бортовому оборудованию 2, обеспечивающему обмен полетной информацией с пилотом или оператором 3 в зависимости от режима пилотирования ЛА. В случае выполнения полета по программному заданию пилотирование осуществляется системой управления плетом 4 в автономном режиме без указанного обмена информацией. Бортовая навигационная система 5 передает навигационные данные, полученные с датчиков системы позиционирования 6 и бесплатформенной инерциальной навигационной системы (БИНС) 7 в систему управления полетом 4.
Перед началом полета из системы управления полета 4 в постоянное запоминающее устройство (ПЗУ) 8 МНК 1 загружаются идентификационные и другие полетные данные (режим движения, режим пилотирования, уровень приоритета и т.п.). В процессе полета некоторые из этих данных могут быть скорректированы по команде из системы управления полетом 4 (например, информация о совершаемом маневре). Информация, влияющая на расчет траектории движения аппарата из ПЗУ 8 поступает в оперативное запоминающее устройство (ОЗУ) 9, также входящее в состав МНК 1, для проведения расчетов параметров траектории процессором модуля 10. Оперативные навигационные данные поступают в ОЗУ 9 для тех же целей непосредственно из бортовой навигационной системы 5.
Данные расчетов из процессора модуля 10 поступают в формирователь кода 11, куда из ПЗУ 8 также поступают идентификационные и полетные данные, включая сведения о режимах и совершаемом маневре. Формирователь кода 11 преобразует полученные данные в код локационного сигнала в соответствии с протоколом обмена навигационными и идентификационными данными между летательными аппаратами и передает его в генератор локационного сигнала 13. Также в генератор локационного сигнала13 поступает синхронизирующий импульс из генератора синхроимпульсов 12 для своевременной генерации локационного сигнала и передачи его на антенну 14. Информация о времени генерации локационного сигнала поступает в генератор синхроимпульсов 12 из формирователя кода 11.
Для блокировки приема локационных сигналов других ЛА на время генерации собственного локационного сигнала из генератора синхроимпульсов 12 на вход приемника локационных сигналов 15 поступает импульс блокировки приема. Импульс блокировки приема начинается за несколько микросекунд до начала локационного сигнала, а заканчивается через несколько микросекунд после его завершения. В период между импульсами блокировки приема приемник локационных сигналов 15 записывает полученные локационные сигналы других ЛА с регистрацией времени приема и передает эти данные в дешифратор кода 16. Дешифратор кода 16 производит расчет параметров траекторий соседних ЛА и передает эту информацию в систему управления полетом 4 для принятия решения об угрозах безопасности полета и корректировке маршрута.
Осуществление изобретения
Высокая информационная плотность и короткая длительность локационного сигнала обеспечивается строгой последовательностью кода и минимизацией объема передаваемых сведений. В частности, для определения относительного положения ЛА по долготе и широте места в формат навигационного сигнала могут входить единицы и доли минут с точностью до десятитысячных (один знак до запятой и четыре после). В этом случае погрешность определения координат составит приблизительно 10 м по долготе и широте, что достаточно для выявления случаев потенциально опасного сближения аппаратов.
Вероятностью ошибочного определения дистанции из-за отсутствия данных о количестве градусов и целых десятков минут можно пренебречь, поскольку период повторяемости координат в несколько раз превышает зону уверенного приема. Для широты (а также для долготы в экваториальной зоне) он превышает 18 км. В полярных зонах длина одного градуса долготы заметно уменьшается по мере приближения к полюсу, но даже на широтах в 70 градусов период повторяемости координат превышает 6 км, что намного больше зоны уверенного приема (около 2 км).
При таком подходе для передачи в локационном сигнале долготы и широты (10 десятизначных цифр) с учетом знаков потребуется 36 бит информации. Высоту над уровнем моря целесообразно передавать в декаметрах (погрешность определения эшелона 10 м), при выделении 12 бит информации на весь диапазон максимально допустимое значение по высоте превысит 40 км. Таким образом, для передачи данных о координатах ЛА достаточно в локационном сигнале выделить 6 байт. На вектор скорости движения потребуется не более 4 байт (10 бит на модуль скорости с шагом в 1 м/с, 10 бит на азимут с шагом в пол градуса и 8 бит с учетом знака на скорость изменения высоты с шагом в 1 м/c).
Выделение 4 байт сигнала на идентификационную информацию позволит создать более 4 миллиардов уникальных регистрационных номеров для ЛА всех типов. По одному байту в локационном сигнале может быть выделено на уровень приоритета (службы экстренной помощи, проведение работ, транспорт, экскурсия), тип ЛА (самолет, вертолет, дрон, конвертоплан и т.д.), режим пилотирования (оператор, автопилот, программа), маневр (снижение, поворот, разгон), признак навигационного сигнала и контрольную сумму. Таким образом, 20 байт локационного сигнала достаточно, чтобы передать объем информации, необходимый для обеспечения безопасности полетов (в том числе, и для контроля всех ЛА наземной инфраструктурой контроля воздушного движения).
Высокая скважность генерации локационного сигнала определяет низкую среднюю мощность выходного передатчика модуля (при длительности импульса не более 10 мкс и частоте следования в 5 Гц не более 250 мкВт при пиковой мощности в 5 Вт). Это обстоятельство в совокупности с простотой алгоритма формирования и расшифровки локационных сигналов позволяет реализовать МНК в формате миниатюрной платы на базе малого числа микросхем. Подобный подход дает возможность использовать модули даже на малоразмерных дронах с высокими требования к массогабаритным характеристикам и энергопотреблению бортового оборудования. Преимущества ЛА, оборудованных МНК, заключается в возможности осуществления полетов в зонах с ограничениями доступа, определяемых повышенными требованиями к безопасности из-за высокой плотности воздушных потоков.
Для функционирования модулей и обмена навигационной информацией необходимо выделить полосу частот в гигагерцовом диапазоне (4-8 ГГц) с шириной порядка 100 МГц исключительно для передачи локационных сигналов ЛА всех типов. Правилами воздушного движения возложить ответственность за столкновение при соблюдении всех полетных ограничений на ту из сторон, на борту аппарата которой не был установлен МНК. Для районов с потенциально высокой плотностью воздушного движения ввести понятие зоны регламентированного движения с ограничением допуска в нее лишь ЛА с установленными на борту МНК.
Регламентировать минимальную дальность приема локационного сигнала для воздушных судов различных классов в зависимости от скорости движения, что определяет пиковую мощность передатчика и чувствительность приемника (при скорости менее 20 м/с - 300 м, при скорости от 20 до 50 м/с - 750 м, при скорости от 50 до 100 м/с - 1500 м и более 100 м/с - 2000 м). Частоту следования локационных сигналов установить в диапазоне от 2,0 до 2,1 Гц для скоростей движения ЛА, не превышающих 150 м/с. Для более высоких скоростей предусмотреть в МНК переключение в режим с частотой следования локационных сигналов в диапазоне от 4 до 4,4 Гц. Период следования локационных сигналов для каждого ЛА установить зависящим от его регистрационного номера, для чего последние три цифры номера умножаются на 20 мкс и вычитаются из 500 мс (250 мс для ЛА с крейсерской скоростью движения более 150 м/с).
Для кодировки локационного сигнала используется частотная или частотно-фазовая модуляция, что обеспечивает минимизацию шумов. Скорость передачи информации составляет 20 Мб/с (1 байт за 400 нс). Первый байт содержит признак локационного сигнала ЛА, одинаковый для всех участников воздушного движения. Последний байт (двадцатый) передает контрольную сумму всех бит сообщения для проверки корректности приема. Второй байт локационного сигнала сообщает об уровне приоритета ЛА. Шесть байт (с третьего по восьмой) содержат информацию о положении аппарата, четыре байта
(с девятого по двенадцатый) - о векторе скорости движения, тринадцатый - о совершаемом маневре. Четырнадцатый байт определяет режим пилотирования, а пять байт
(с пятнадцатого по девятнадцатый) - регистрационный номер, содержащий в себе информацию и о классе ЛА, и о периоде следования его локационных сигналов. Длительность локационного сигнала составляет 8 мкс.
Вероятность интерференции двух локационных сигналов при почти одновременной их генерации (когда разница во времени начала передачи не превышает 10 мкс) двумя ЛА, двигающимися со скоростями менее 150 м/с, составляет четыре тысячных процента. В этом случае данные об участниках информационного конфликта не могут быть расшифрованы соседними ЛА, а сами участники при разнице во времени менее 2 мкс не регистрируют локационный сигнал второго участника конфликта даже с неправильной контрольной суммой. В случае точного совпадения периодов генерации локационных сигналов локальный информационный конфликт может преобразоваться в глобальный информационный конфликт.
Если разница между сигналами превышает 2-3 мкс, как минимум один из участников при снятии блокировки приема обнаружит часть постороннего локационного сигнала (последние байты сообщения). В случае повторного обнаружения укороченного сигнала на границе зоны блокировки приема МНК осуществляет однократное сокращение периода генерации на несколько длительностей локационного сигнала (не более 2 мс). Конкретная величина сдвига определяется генератором случайных чисел, при этом контролируется, что смещение не приводит к интерференции локационного сигнала с локационными сигналами других ЛА, находящихся в зоне приема. Данный алгоритм случайного сдвига позволяет разрешать нестрогие глобальные информационные конфликты.
Вероятность строгого глобального информационного конфликта, когда разница во времени начала генерации локационных сигналов не превышает 2 мкс, а частота следования совпадает, не превышает одной миллионной процента. При наличии в зоне глобального навигационного конфликта других ЛА они сигнализируют о появлении повторного некорректного сигнала с задержкой в диапазоне 500 или 250 мс условным кодом в формате сведений о режиме пилотирования. Участники глобального навигационного конфликта, идентифицировав себя в качестве источников интерферирующих локационных сигналов по отсутствию зарегистрированных повторных некорректных локационных сигналов, реализуют алгоритм случайного сдвига.
При полете в свободном пространстве, где локационные сигналы других ЛА отсутствуют, для профилактики глобального информационного конфликта рекомендуется применять алгоритм случайного сдвига через каждые 5-7 периодов излучения навигационного сигнала. Поскольку дальность зоны приема даже при встречном движении ЛА от границ зоны до точки пересечения траекторий обеспечивает не менее 14 принимаемых локационных сигналов, вероятность попадания их всех в зону блокировки приема уменьшается до одной миллиардной процента. В зонах высокой плотности воздушного движения организация транспортных коридоров и создание наземной инфраструктуры мониторинга позволит свести вероятность столкновения из-за глобального информационного конфликта к нулю.
Реализуемость изобретения определяется тем обстоятельством, что техническое решение модуля навигационной коммуникации ориентируется исключительно на технологии микроэлектроники, широко представленные на рынке. Функциональная схема МНК не содержит узлов, не апробированных в течение многих лет в составе других радиоэлектронных устройств.
Исходя из этого, можно ожидать, что при массовом производстве модулей МНК их стоимость будет сравнима со стоимостью приемников спутниковых систем позиционирования, которыми сейчас оснащены большинство ЛА. Функционально же они обеспечат всепогодную связь и эффективный обмен информацией между участниками воздушного движения всех классов и типов, повысят безопасность движения, особенно в условиях ограниченной видимости.
Масштабное внедрение МНК позволит формировать зоны ограниченного доступа за счет создания наземных средств мониторинга, с одной стороны, и минимизировать ограничения в зонах регламентированного движения, с другой. Кроме того, появление средств эффективного обмена навигационной информацией между ЛА позволит сформулировать правила воздушного движения, обеспечивающие безопасность полетов.
Ссылки:
1) https://patents.google.com/patent/WO2018182708A1/en
2) https://patents.google.com/patent/WO2022231467A1/ru
| название | год | авторы | номер документа |
|---|---|---|---|
| Коммуникационно-навигационная система для управления транспортными потоками | 2021 |
|
RU2770938C1 |
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2020 |
|
RU2759057C1 |
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2020 |
|
RU2748133C1 |
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2020 |
|
RU2759058C1 |
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2020 |
|
RU2757094C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ НЕСАНКЦИОНИРОВАННОГО ИСПОЛЬЗОВАНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2446481C2 |
| Система управления вооружением летательных аппаратов | 2021 |
|
RU2780716C1 |
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2390815C1 |
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2019 |
|
RU2725928C1 |
| УНИФИЦИРОВАННЫЙ НАВИГАЦИОННЫЙ КОМПЛЕКС ЛА | 2015 |
|
RU2590934C1 |
Изобретение относится к бортовым радиоэлектронным средствам, предназначенным для обеспечения безопасности движения летательных аппаратов (ЛА). Сущность модуля навигационной коммуникации (МНК) заключается в том, что он содержит: постоянное запоминающее устройство (ПЗУ), выполненное с возможностью хранения информации, необходимой для расчёта траектории ЛА; оперативное запоминающее устройство (ОЗУ), выполненное с возможностью приёма оперативных навигационных данных из бортовой навигационной системы; процессор, выполненный с возможностью расчёта параметров траектории ЛА; формирователь кода, выполненный с возможностью преобразования расчётных данных в код локационного сигнала; генератор локационных сигналов, выполненный с возможностью приёма синхронизирующего импульса из генератора синхроимпульсов для последующей передачи на антенну; приёмник локационных сигналов, выполненный с возможностью блокировки приема локационных сигналов других ЛА на время генерации собственного локационного сигнала, а также записи полученных локационных сигналов других ЛА. Технический результат изобретения заключается в обеспечении всепогодной связи между ЛА и повышении безопасности движения. 1 ил.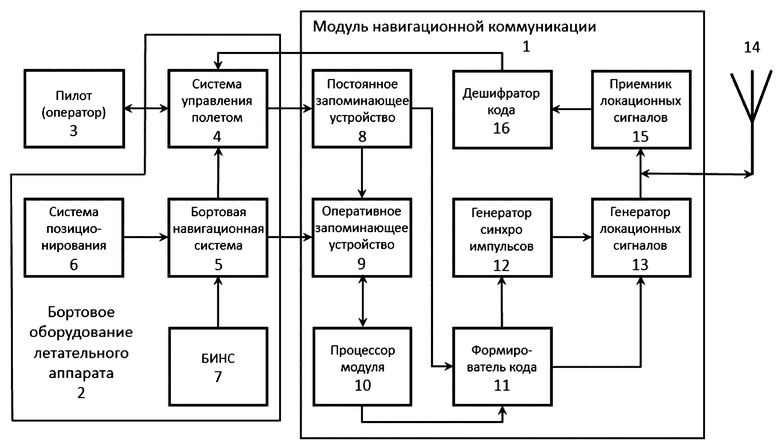
Модуль навигационной коммуникации (МНК), предназначенный для организации обмена навигационной, идентификационной и полетной информацией в радиочастотном диапазоне с помощью бортовых антенн между летательными аппаратами (ЛА), а также с наземными средствами контроля воздушного движения, выполненный в виде миниатюрной платы, отличающийся тем, что содержит постоянное запоминающее устройство (ПЗУ), выполненное с возможностью хранения информации, необходимой для расчёта траектории ЛА; оперативное запоминающее устройство (ОЗУ), выполненное с возможностью приёма оперативных навигационных данных из бортовой навигационной системы; процессор, выполненный с возможностью расчёта параметров траектории ЛА; формирователь кода, выполненный с возможностью преобразования расчётных данных процессора, а также идентификационных и полетных данных ПЗУ, в код локационного сигнала согласно протоколу обмена данными между ЛА; генератор синхроимпульсов, выполненный с возможностью приёма информации о времени генерации локационного сигнала из формирователя кода; генератор локационных сигналов, выполненный с возможностью приёма синхронизирующего импульса из генератора синхроимпульсов для последующей передачи на антенну, приёмник локационных сигналов, выполненный с возможностью блокировки приема локационных сигналов других ЛА на время генерации собственного локационного сигнала, а также записи полученных локационных сигналов других ЛА с регистрацией времени приёма локационных сигналов и последующей передачей в дешифратор кода, реализованный с возможностью определения параметров траекторий других ЛА и передачи данной информации в систему управления полётом; при этом первый выход ПЗУ соединен с первым входом ОЗУ, а второй выход ПЗУ соединен с первым входом формирователя кода; второй вход ОЗУ соединен с первым выходом процессора; выход процессора соединен со вторым входом формирователя кода; первый выход формирователя кода соединен с входом генератора синхроимпульсов, а второй выход формирователя кода соединен с первым входом генератора локационных сигналов, второй вход которого соединен с выходом генератора синхроимпульсов; при этом выход генератора локационных сигналов соединен с входом антенны и первым входом приемника локационных сигналов, а выход антенны соединен со вторым входом приемника локационных сигналов, выход которого соединен со входом дешифратора кода.
| WO 2022231467 A1, 03.11.2022 | |||
| DE 112017007355 T5, 19.12.2019 | |||
| Пилотажно-навигационная система транспортного летательного аппарата | 2024 |
|
RU2822088C1 |
| ГИРОСКОПИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2308681C1 |

