Область техники
Изобретение относится к коммуникационно-навигационным системам, предназначенным для обеспечения безопасности и эффективности движения транспортных средств за счет обмена навигационной информацией по беспроводной связи, автоматизации разрешения конфликтов и оперативного управления движением из центров управления транспортными потоками.
Предшествующий уровень техники
Известны коммуникационно-навигационные системы, базирующиеся на обмене навигационной информацией по данным глобальной системы позиционирования между транспортными средствами или с инфраструктурными устройствами при помощи модулей связи, использующих существующие алгоритмы передачи информации типа протоколов мессенджеров, WLAN или им подобным (DE102008009330A1, CN101910797A).
Беспроводные системы связи активно используются для роботизации транспортных операций или ассистирования водителям. В частности, для коммуникаций на дальности до 350 м разработан стандарт DSRC (dedicated short range communications), использующий протокол IEEE 802.11. Данный стандарт предложен Американским обществом интеллектуального транспорта и Департаментом транспорта США.
Недостатком подобных подходов является ориентация на формирование канала связи между двумя абонентами, в том числе с подтверждением корректности полученного пакета данных. Поскольку транспортные потоки могут состоять из сотен и тысяч участников движения организация коммуникационных каналов каждого с каждым требует неоправданно больших ресурсов по частотному диапазону.
Всесторонняя направленность излучения радиочастотного диапазона позволяет осуществлять передачу навигационной информации от каждого транспорта всем участникам движения в зоне уверенного приема. Наличие подобной информации позволяет децентрализованно разрешать конфликты транспортных средств на базе единых и однозначных правил.
В зонах высокой плотности транспортных потоков сбор навигационной информации всех участников движения позволяет организовать управление потоками. Для практической применимости подхода необходимо решить проблему надежной оперативной передачи навигационной информации от каждого транспортного средства всем участникам движения.
Раскрытие изобретения
Объектом изобретения является коммуникационно-навигационная система (КНС) оперативного обмена информацией между всеми участниками движения, необходимой для обеспечения безопасности маневрирования. Основой КНС являются бортовые приемо-передающие модули, располагаемые на транспортных средствах, обеспечивающие передачу локационного сигнала, а также прием локационных сигналов других транспортных средств.
В состав пакета данных локационного сигнала входит идентификационная, навигационная и контрольная информация. Передача локационного сигнала всеми транспортными средствами производится на одной частоте в специально выделенном радиочастотном диапазоне
(с несущей в единицы гигагерц). Прием локационных сигналов осуществляется как транспортными средствами, так и стационарными центрами управления транспортными потоками (ЦУТ), являющимися инфраструктурными объектами КНС. Стационарные модули ЦУТ обеспечивают прием локационных сигналов всех транспортных средств, находящихся в зоне уверенного приема, а также передачу позиционных и управляющих сигналов. Бортовые модули КНС обеспечивают прием позиционных и управляющих сигналов ЦУТ.
К транспортным средствам относятся самолеты, морские суда, автомобили и другие транспортные средства, движущиеся со скоростями, требующими применения правил движения для обеспечения безопасности.
К навигационной информации относятся данные о положении транспортного средства, его ориентации, скорости и направлении движения, пункте назначения и промежуточных точках траектории или транспортном коридоре.
Помимо сведений о параметрах движения передаваемый транспортным средством локационный сигнал содержит также идентификационную и контрольную информацию. Последняя необходима для оценки корректности расшифровки информации и контроля отсутствия интерференции нескольких локационных сигналов. С этой целью указанный сигнал может начинаться с признака локационного сигнала и его длины в байтах, а заканчивается контрольной суммой сообщения.
В состав идентификационной информации помимо уникального идентификационного номера транспортного средства может входить тип транспортного средства, режим управления и информация о работоспособности бортовых систем. По мере совершенствования КНС и бортовых технических средств (модулей КНС) расширение спектра передаваемой информации может осуществляться за счет выделения дополнительных диапазонов радиочастот.
Длительность локационного сигнала составляет десятки микросекунд (передача информации осуществляется на частотах в единицы или десятки мегабит в секунду) при периоде повторения в единицы или доли секунд. Интервал между локационными сигналами определяется типом транспортного средства и средней скоростью движения. Он разбивается на тысячи или несколько десятков тысяч тактов, по длительности превышающих и длительность локационного сигнала, и время распространения радиоволны до границы зоны максимальной дальности связи.
Скважность в тысячи или десятки тысяч единиц обеспечивает низкую вероятность случайной интерференции локационных сигналов. Если разница во времени между локационными сигналами сближающихся транспортных средств внутри одного интервала оказывается меньше одного такта, возникает коммуникационный конфликт. Бортовые модули КНС имеют алгоритмы автоматического разрешения коммуникационного конфликта, например, смещением локационного сигнала на один такт в разные стороны.
Целью сбора локационных сигналов является прогнозный расчет траекторий движения, что осуществляется с помощью бортовых вычислительных средств, и выявление локомоционных конфликтов. Этот конфликт возникает в случае, когда разница во времени пересечения одной точки траектории двумя транспортными средствами оказывается меньше интервала безопасности, задаваемого для каждого типа транспортных средств. Бортовые модули КНС имеют алгоритмы автоматического разрешения локомоционного конфликта. В случае ручного управления они предупреждают оператора (водителя, пилота, штурмана) об угрозе столкновения и дают рекомендации в соответствии с указанными алгоритмами.
Центры управления транспортными потоками (ЦУТ) являются составной частью КНС и создаются там, где высокая плотность транспортных потоков требует централизованного управления для разрешения коммуникационных и локомоционных конфликтов. Рабочая зона одного ЦУТ представляет собой ограниченную территорию (акваторию, воздушное пространство), на которой располагаются стационарные модули КНС (станции КНС).
Станции КНС излучают позиционные сигналы в радиочастотном диапазоне (единицы гигагерц), специально выделенном для позиционных сигналов и формирования локальных систем позиционирования. Размещение станций КНС по рабочей зоне организуется таким образом, чтобы в любой точке зоны бортовыми модулями КНС принимался позиционный сигнал, по меньшей мере, четырех станций КНС. Данные сигналы используются для оперативного определения местонахождения транспортного средства с дециметровой и миллисекундной погрешностью.
Помимо излучения позиционных сигналов станции КНС принимают локационные сигналы транспортных средств и при необходимости передают управляющие сигналы (как общие, так и индивидуальные). Все станции одного ЦУТ связаны кабельными информационными линиями связи с базовой станцией, осуществляющей обработку всей собираемой информации и управление потоками в пределах зоны ответственности ЦУТ.
Также по кабельным линиям связи осуществляется синхронизация позиционных сигналов, испускаемых станциями поочередно с табличной задержкой порядка одного такта между соседними по времени сигналами. Наличие задержек, зафиксированных в открытых электронных источниках и загружаемых в бортовые модули транспортных средств заранее, обеспечивает отсутствие интерференции позиционных сигналов.
Таким образом, КНС состоит из бортовых модулей транспортных средств и стационарных модулей ЦУТ, объединенных в локальную сеть с базовым модулем, отвечающим за обмен информацией с соседними ЦУТ. Идентификационная информация для формирования локационного сигнала в бортовые модули поступает из бортового компьютера транспортного средства. Навигационная информация поступает от датчиков глобальных или локальных систем позиционирования. Контрольная информация формируется самими бортовыми модулями.
При нахождении транспортного средства в зоне ответственности ЦУТ кроме повышения точности и оперативности определения его положения бортовыми модулями производится контроль правильности их работы стационарными модулями КНС. С определенной периодичностью собирается информация о времени прихода локационного сигнала транспортного средства на разные станции КНС и проверяется соответствие измеренной задержки расчетной.
Локальная система позиционирования по позиционным сигналам станций ЦУТ обеспечивает высокую скорость, надежность и оперативность обновления информации о положении транспортных средств методами трилатерации. В отличие от спутниковых систем позиционирования местоположение станций КНС является неизменным, что упрощает процесс вычисления координат, и заносится в общедоступные базы данных вместе с величинами задержек. С целью повышения точности для каждой локации может формироваться общедоступная таблица поправок, учитывающая рельеф местности, наличие сооружений и другие особенности, отражающиеся на времени распространения позиционных сигналов.
Алгоритм работы бортового модуля КНС заключается в следующем. Перед началом движения приемник бортового модуля осуществляет прием в диапазоне позиционных сигналов. При их отсутствии в связи с нахождением за пределами зоны ЦУТ он осуществляет прием в диапазоне локационных сигналов. Расшифровывает полученные локационные сигналы и формирует карту движения транспортных средств ближней зоны. После этого бортовой модуль КНС выбирает свободный такт интервала по минимуму шумового сигнала для передачи сформированного локационного сигнала.
Получив задание от оператора о режиме и цели движения, а данные о местоположении от навигационной бортовой системы, бортовой модуль КНС формирует локационный сигнал и передает его в выбранный момент времени. Во время движения бортовой модуль непрерывно следит за возникновением коммуникационных или локомоционных конфликтов. Первые разрешаются на базе автоматических алгоритмов, о вторых в ручном режиме управления КНС предупреждает оператора и выдает рекомендации по их разрешению. В автоматическом режиме пилотирования разрешение локомоционных конфликтов осуществляется автоматически на основании единых и однозначных правил.
В пределах зоны ответственности ЦУТ приемник бортового модуля КНС помимо сбора локационных сигналов осуществляет уточнение местоположения транспортного средства по позиционным сигналам ЦУТ. Зарегистрировав сигнал от одной из станций ЦУТ, модуль фиксирует время прихода синхроимпульса и идентифицирует станцию, вычисляя ее положение. Если в течение заданного времени, составляющего малую долю интервала позиционных сигналов, после прихода импульса получается зарегистрировать менее трех импульсов, то модуль ожидает следующего интервала. Для определенности задержек все позиционные сигналы одного ЦУТ передаются в начальной стадии интервала.
Если число полученных позиционных сигналов в течение интервала с правильной контрольной суммой составляет не менее четырех, то из них составляется упорядоченный список по амплитуде сигнала. Первые четыре сигнала используются для вычисления положения методами трилатерации, при этом из временных интервалов вычитаются значения табличных задержек позиционных сигналов станций. Остальные значения используются для контроля и корректировки полученных результатов.
Уточненное значение местоположения по данным локальной системы позиционирования бортовой модуль передает бортовой навигационной системе и включает в состав локационного сигнала. Следующей стадией работы КНС является контроль исправности навигационных систем транспортного средства, который осуществляет ЦУТ. Все станции, осуществляющие прием локационного сигнала транспортного средства, регистрируют время его прихода и передают на базовую станцию ЦУТ, которая вычисляет отклонение измеренных задержек от расчетных.
В случае наличия отклонения, но при допустимой его величине, вызванного неточной калибровкой датчиков, бортовому модулю передается управляющий сигнал о необходимой корректировке. В случае, если отклонение превышает величину, компенсируемую калибровкой датчиков, бортовому модулю сообщается информация о неисправности оборудования. Таким образом, еще одной функцией бортовых модулей КНС является передача управляющих сигналов ЦУТ оператору или системе управления транспортным средством.
Алгоритм функционирования станций ЦУТ понятен из описания, приведенного выше. Моделирование процессов движения в зоне ответственности ЦУТ осуществляется на вычислительных мощностях базовой станции. Для этого по кабельным линиям связи информация обо всех локационных сигналах транспортных средств передается на нее со всех станций ЦУТ.
Основной функцией базовой станции является диспетчеризация и обеспечение безопасности движения при минимизации временных и энергетических затрат на перемещение транспортных средств. С этой целью ЦУТ может управлять светофорами, дорожными индикаторами и другими электронными средствами информационного обеспечения движения. В зависимости от дорожной обстановки управляющие сигналы ЦУТ могут носить рекомендательный или обязательный характер.
По мере внедрения бортовых средств КНС можно будет отказаться от дорогостоящих элементов дорожной инфраструктуры в пользу виртуальных светофоров и дорожных знаков. Более того, высокая информационная оснащенность ЦУТ позволит минимизировать ограничения теми условиями и обстоятельствами, в которых их наличие является оправданным с точки зрения безопасности и эффективности.
Краткое описание чертежей
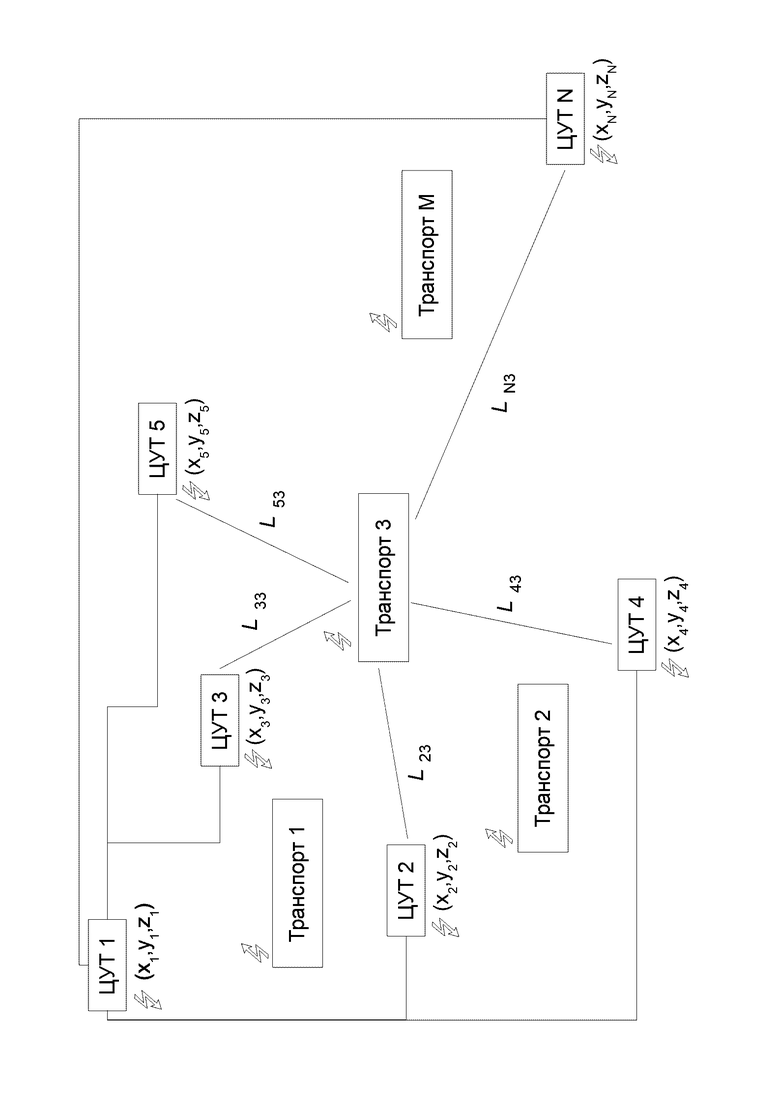
На фигуре 1 изображена структура коммуникационно-навигационной системы, где базовая станция ЦУТ 1 связана стационарными соединениями со всеми остальными станциями ЦУТ 2 … ЦУТ N, местоположение которых (хi, yi, zi) известно с высокой точностью. На примере Транспорта 3 показано, как расстояния Li3 от транспортного средства до станций определяют разницу во временных задержках как позиционных, так и локационного сигнала. Методы трилатерации позволяют вычислить значения величин L и определить координаты транспортного средства как на борту, так и в ЦУТ.
Лучший вариант осуществления изобретения
Для функционирования КНС целесообразно выделить три поддиапазона частот в гигагерцовом диапазоне (с полосой порядка 200 МГц): для локационных, позиционных и управляющих сигналов. Часть управляющих сигналов может передаваться в диапазоне позиционных сигналов, поскольку сами позиционные сигналы будут занимать только первые несколько десятков тактов из интервала в десятки тысяч тактов. По мере развития технологий допустимо выделение дополнительных поддиапазонов для расширения функций системы. В качестве примера дополнительных функций можно привести рассылку предупреждений о чрезвычайной ситуации типа обвала или обледенения участка трассы, что особенно важно за пределами ЦУТ. Подобный подход позволит обеспечить совместимость ранее выпущенных модулей системы, имеющих ограниченный функционал, с новым оборудованием транспортных средств и центров управления.
Учитывая характерные размеры объектов, представляющих наибольший интерес для оснащения станциями КНС (порты, аэродромы), типовые размеры рабочей зоны ЦУТ находятся в диапазоне от 1 до 10 км. При ограничении рабочей дальностью каналов между станциями и бортовыми средствами в 3-5 км для обеспечения минимальной зоны потребуется 5-6 разнесенных станций, а для максимальной - 16-25. Развитие сети ЦУТ может происходить как путем расширения рабочей зоны (подключением новых станций к существующему центру), так и формированием новых центров. Создание новой зоны ЦУТ по соседству с существующей предполагает прокладку линии связи между базовыми станциями для обмена информацией и разграничения зон ответственности.
Импульсный характер сигналов с высокой скважностью позволяет определять местоположение и ориентацию тысяч мобильных объектов с оперативностью в единицы секунд. Например, на частотах в единицы гигагерц дальность в 5 км со скоростью передачи информации до 10 Мбит/с обеспечивается при пиковой мощности излучателя в единицы ватт (для определенности выберем 5 Вт). Для передачи 50 байт информации (400 бит) требуется длительность импульса излучения 40 мкс. При повторении сигнала каждую секунду скважность импульсов составит 25000, что соответствует средней мощности излучателя в 200 мкВт.
При наличии 2000 транспортных средств в границах рабочей зоны ЦУТ вероятность интерференции (наложения двух локационных сигналов) даже без принятия специальных мер не превышает 10 %. Чтобы минимизировать вероятность интерференции сигналов, можно использовать следующий алгоритм. Интервал навигационного сигнала (1 с) разбивается на 20 тысяч тактов по 50 мкс (что соответствует 15 км по дальности), при этом точкой отсчета выбирается время начала синхроимпульса базовой станции.
При вхождении в рабочую зону ЦУТ бортовой модуль КНС занимает случайный временной интервал. Привязавшись к временной шкале ЦУТ по позиционным сигналам станций, модуль сдвигает время генерации локационного сигнала к начальному моменту ближайшего такта интервала. В случае, если данный такт оказывается занят другим участником движения, и существует вероятность интерференции сигналов, от ЦУТ поступает команда на смену интервала.
При необходимости сопровождения в границах одной зоны ЦУТ более 20 тысяч транспортных средств проблема решается увеличением плотности станций и повышением порога чувствительности их приемников. В случае локального по времени увеличения плотности потоков (в часы пик) допустимо снижение частоты следования локационных сигналов по команде ЦУТ до периодов в несколько секунд с соответствующим увеличением числа интервалов. Учитывая снижение средней скорости потоков в условиях пробок данное решение проблемы является оправданным.
Локальный ЦУТ организуется следующим образом: по всей площади рабочей зоны размещаются от 6 до 25 стационарных станций, положение антенн которых измеряется с сантиметровой точностью. Одна из станций выбирается в качестве базовой, ее сигнал синхронизует работу остальных, излучающих позиционные сигналы по очереди. Жестко фиксированные задержки в один такт, превышающие время распространения электромагнитной волны между максимально удаленными станциями, позволяет исключить интерференцию позиционных сигналов. Соседние ЦУТ также разводят по времени позиционные сигналы своих станций, чтобы избежать интерференции сигналов на границах зон ответственности.
Для повышения информационной емкости локационного сигнала можно не передавать целое число градусов по широте и долготе, предполагая, что данная величина известна (например, по данным GPS). Тогда для прецизионного определения местоположения с дециметровой точностью потребуется 20 бит на одну горизонтальную координату и 16 бит - на вертикальную (не выше 6 км над уровнем моря). Таким образом, на передачу информации о местоположении транспортного средства потребуется 7 байт, на идентификацию - 6 байт (хватит для 1014 транспортных средств).
Если заложить в локационный сигнал конечный пункт и ближайшие две точки ветвления маршрута, выделив им по 6 байт на каждую (дециметровая точность не требуется, достаточно метровой), то из 50 байт остается 19. Для контрольной информации достаточно 3 байт, для информации о режиме, направлении и скорости движения и исправности оборудования - еще 6 байт. Если ввести понятие транспортных коридоров (полос движения) и их нумерацию, то для описания локальных целей потребуется еще меньшая длина локационного сигнала. Для этого требуется стандартизация навигационного, идентификационного и режимного описания на международном уровне.
Промышленная применимость
Реализуемость изобретения определяется тем обстоятельством, что все технические средства (и бортовые, и стационарные модули КНС) ориентируются на технологии электроники, представленные на рынке. Используемые в настоящее время алгоритмы позиционирования методами трилатерации решают значительно более сложные задачи в миниатюрных и недорогих устройствах.
Исходя из этого, можно ожидать, что при массовом производстве бортовых модулей КНС их стоимость будет сравнима со стоимостью приемников глобальных систем позиционирования. Функционально же они существенно дополнят возможности навигационного обеспечения, позволят оперативно реагировать на изменение дорожной обстановки, повысить эффективность и безопасность движения. Возможности прогнозирования локомоционных конфликтов при большой плотности участников движения определяется вычислительными ресурсами бортового компьютера транспортного средства.
Стоимость создания ЦУТ будет определяться преимущественно стоимостью сооружений, работ по прокладке кабелей связи и вычислительного центра для моделирования дорожной обстановки. Стоимость же оборудования станций КНС будет составлять единицы или даже долей процентов от общей стоимости создания ЦУТ. Ожидаемый эффект от внедрения только за счет минимизации аварий и пробок при существенном ускорении перевозок окупит вложения за считанные месяцы.
Наиболее востребована централизация управления на территориях (акваториях, воздушных пространствах), требующих организации движения и контроля потоков транспортных средств. К таким зонам относятся порты и другие акватории со сложным фарватером, карьеры для добычи полезных ископаемых открытым способом, атомные станции, аэропорты, сложные транспортные развязки и т.п. Преимущества применения КНС особенно заметно проявляются в условиях ограниченной видимости, штормовой погоды, обледенения дорожного покрытия или снежных заносов.
Следование командам ЦУТ обеспечивает четкую привязку траектории движения к транспортным коридорам (дорожным полосам, фарватеру) и требуемое дистанцирование от других транспортных средств. В сочетании с уверенным приемом реперных сигналов это позволит не только обеспечить безопасность, но и минимизировать временные потери всех участников движения.
Постепенное внедрение технологии при частичном оснащении транспортных средств бортовыми модулями КНС потребует разработки политики поэтапного перехода от материальных средств управления дорожным движением к виртуальным. Тем не менее, внедрение КНС позволит гораздо более дешевыми средствами (программными) повысить эффективность и безопасность движения транспортных средств.
Ссылки:
1) https://patents.google.com/patent/DE102008009330A1/en?q=communication+navigation+system&oq=communication+navigation+system&page=1
2) https://patents.google.com/patent/CN101910797A/en?q=communication+navigation+system&oq=communication+navigation+system
3) https://patents.google.com/patent/US10091670B2/en?q=dedicated+short+range+communications&oq=dedicated+short+range+communications
Изобретение относится к коммуникационно-навигационным системам. Коммуникационно-навигационная система для управления транспортными потоками, при этом бортовые приемопередающие модули, предназначенные для передачи локационного сигнала, содержащего идентификационную, навигационную и контрольную информацию, позволяющую дистанционно однозначно идентифицировать транспортное средство, установить его местоположение и параметры траектории движения для выявления угроз безопасности других участников движения, а также сбор и расшифровку локационных сигналов всех транспортных средств, находящихся в зоне радиосвязи и оборудованных модулями КНС. Центры управления транспортными потоками на базе пространственно распределенной по зоне ответственности сети стационарных приемопередающих модулей КНС выполнены с возможностью генерации позиционных сигналов, обеспечивающих формирование локальной системы позиционирования с помощью методов трилатерации. Передача информации осуществляется от каждого транспортного средства всем, находящимся в зоне уверенного приема, на одной частоте в выделенном для локационных сигналов диапазоне радиочастот, компактная кодировка идентификационной, навигационной и контрольной информации обеспечивает короткую длительность локационного сигнала в микросекундном диапазоне, выбор интервала между локационными сигналами одного транспортного средства, находящегося в диапазоне единиц или долей гигагерц, определяется скоростью изменения оперативной обстановки. Достигается оперативное управление движением транспортных потоков. 1 ил.
Коммуникационно-навигационная система (КНС) для управления транспортными потоками, содержащая бортовые приемопередающие модули и центры управления транспортными потоками (ЦУТ) на базе пространственно распределенной по зоне ответственности сети стационарных приемопередающих модулей КНС, при этом бортовые приемопередающие модули, располагающиеся на транспортных средствах, выполнены с возможностью передачи локационного сигнала, содержащего идентификационную, навигационную и контрольную информацию, позволяющую дистанционно однозначно идентифицировать транспортное средство, установить его местоположение и параметры траектории движения для выявления угроз безопасности другим участникам движения, а также сбора и расшифровки локационных сигналов всех транспортных средств, находящихся в зоне радиосвязи и оборудованных модулями КНС, а центры управления транспортными потоками на базе пространственно распределенной по зоне ответственности сети стационарных приемопередающих модулей КНС выполнены с возможностью генерации позиционных сигналов, обеспечивающих формирование локальной системы позиционирования с помощью методов трилатерации, контроля достоверности навигационной информации локационных сигналов бортовых модулей КНС, управления транспортными потоками с помощью управляющих сигналов, регистрации нарушений, а также обмена информацией с соседними ЦУТ, отличающаяся тем, что передача информации на бортовых приемопередающих модулях осуществляется от каждого транспортного средства всем, находящимся в зоне уверенного приема, на одной частоте в выделенном для локационных сигналов диапазоне радиочастот, компактная кодировка идентификационной, навигационной и контрольной информации обеспечивает короткую длительность локационного сигнала в микросекундном диапазоне, выбор интервала между локационными сигналами одного транспортного средства, находящегося в диапазоне единиц или долей гигагерц, определяется скоростью изменения оперативной обстановки, высокая скважность сигнала минимизирует вероятность интерференции сигналов двух транспортных средств в зоне уверенного приема, при этом содержащиеся в локационном сигнале контрольные параметры дают возможность проверки достоверности расшифровки информации, а в упомянутых центрах управления транспортными потоками передача информации осуществляется от каждого стационарного модуля КНС всем транспортным средствам, находящимся в зоне уверенного приема на одной частоте в выделенном для позиционных сигналов диапазоне радиочастот, все модули ЦУТ связаны между собой стационарными соединениями, обеспечивающими необходимую скорость передачи данных всех локационных сигналов и синхронизацию позиционных сигналов, ЦУТ обеспечивает сбор и анализ локационных сигналов из зоны ответственности центра, управление транспортными потоками, выявление угроз безопасности движения и разрешение конфликтов, стационарные задержки между позиционными сигналами разных станций одного ЦУТ выбираются таким образом, чтобы избежать их интерференции, бортовые модули КНС обладают способностью расшифровывать позиционные сигналы ЦУТ, а также принимать управляющие сигналы и передавать оператору команды ЦУТ, при этом управляющие сигналы могут носить рекомендательный или обязательный характер и относиться ко всем участникам движения или к отдельным транспортным средствам.
| СПОСОБ И СИСТЕМА ДЛЯ НАВИГАЦИИ ТРАНСПОРТНОГО ПАРКА, ДИСПЕТЧЕРИЗАЦИЯ И ПРОКЛАДКА МАРШРУТА ДЛЯ МНОЖЕСТВА ТРАНСПОРТНЫХ СРЕДСТВ И МНОЖЕСТВА МЕСТ НАЗНАЧЕНИЯ | 2012 |
|
RU2629438C2 |
| US 8321125 B2, 27.11.2012 | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |

