Изобретение относится к области измерительной техники и может быть использовано в системах навигации, топопривязки и ориентирования наземных подвижных объектов.
Известна наземная гироскопическая система [1] для подвижных объектов на базе динамически настраиваемого гироскопа (ДНГ), в которой в двух вариантах реализуется схема трехосного карданова подвеса. Указанная система позволяет обеспечить высокую точность определения курсового угла подвижного объекта как на стоянке, так и в процессе движения.
Недостатком известной наземной гироскопической системы является сложность реализации алгоритмов решения навигационных задач и высокая стоимость.
Известны спутниковые навигационные (СНС) или так называемые радионавигационные системы (СРНС), применяемые в интересах обеспечения ориентации [2]. Определение ориентации с помощью СНС главным образом основывается на использовании идеи приема сигналов СНС на разнесенные антенны. Подобная аппаратура может решать задачи определения координат места, вектора путевой скорости движения и пространственной ориентации антенной системы и связанного с ней объекта, а также выдачи во внешние устройства текущих координат, пространственной ориентации объекта, значений углов азимута, тангажа и крена.
Достоинствами подобных систем являются высокая точность определения навигационных параметров объекта, независимость точности от времени и расстояния, незначительные габариты и низкая стоимость. Большим недостатком указанных систем является их зависимость от природных и погодных условий из-за нарушения радиовидимости навигационных космических аппаратов (НКА).
Известна навигационная аппаратура ТНА-4 для наземных подвижных объектов [3], которая серийно изготавливается Саратовским агрегатным заводом с 1970-х годов, которая принята за прототип.
Известная навигационная аппаратура ТНА-4 предназначена для:
- непрерывного автоматического определения и индикации координат и дирекционного угла объекта;
- непрерывного автоматического определения и индикации дирекционного угла объекта на пункт назначения;
- вычисления координат целей по введенным в аппаратуру дальности до цели и углу визирования на цель.
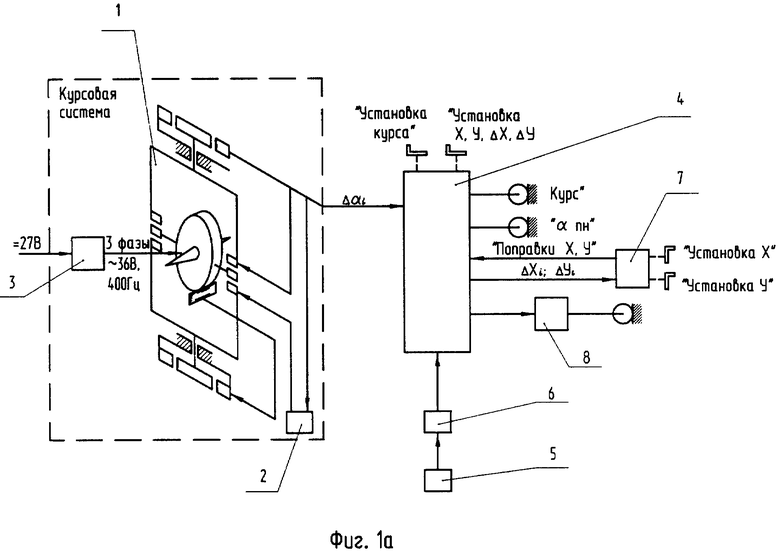
Функциональная схема известной навигационной аппаратуры ТНА-4 представлена на Фиг.1а. В состав известной навигационной аппаратуры входят:
- курсовая система, предназначенная для непрерывного определения изменений дирекционного угла объекта и передачи информации о их величине и знаке в координатор и состоящая из гирокурсоуказателя 1 на базе трехстепенного астатического гироскопа с системой горизонтальной коррекции и датчиком угла на оси наружной рамы, пульта управления 2 и электромашинного преобразователя постоянного напряжения в переменное трехфазное напряжение 3;
- электромеханический координатор 4, предназначенный для вычисления и индикации координат и дирекционного угла движущегося объекта, дирекционного угла на пункт назначения и разложения элементарных отрезков дальности до цели при решении навигационных задач;
- механический датчик пути 5 и формирователь импульсов 6, обеспечивающие преобразование информации о пройденном объектом пути и его знаке;
- индикаторный планшет 7, предназначенный для непрерывной индикации местоположения движущегося объекта на топографической карте;
- курсоуказатель 8, предназначенный для индикации дирекционного угла объекта, поступающего с координатора, и представляющий собой одноканальную электромеханическую следящую систему.
Принцип действия известной аппаратуры ТНА-4 при определении координат подвижного объекта основан на разложении элементарных отрезков пути ΔSi на две составляющие:
и последующем алгебраическом суммировании этих составляющих с исходными координатами Хисх и Yисх

где: n - число элементарных отрезков пути;
αi - дирекционный угол объекта в момент разложения (угол между проекцией продольной оси объекта на горизонтальную плоскость и координатой Х, параллельной направлению на север).
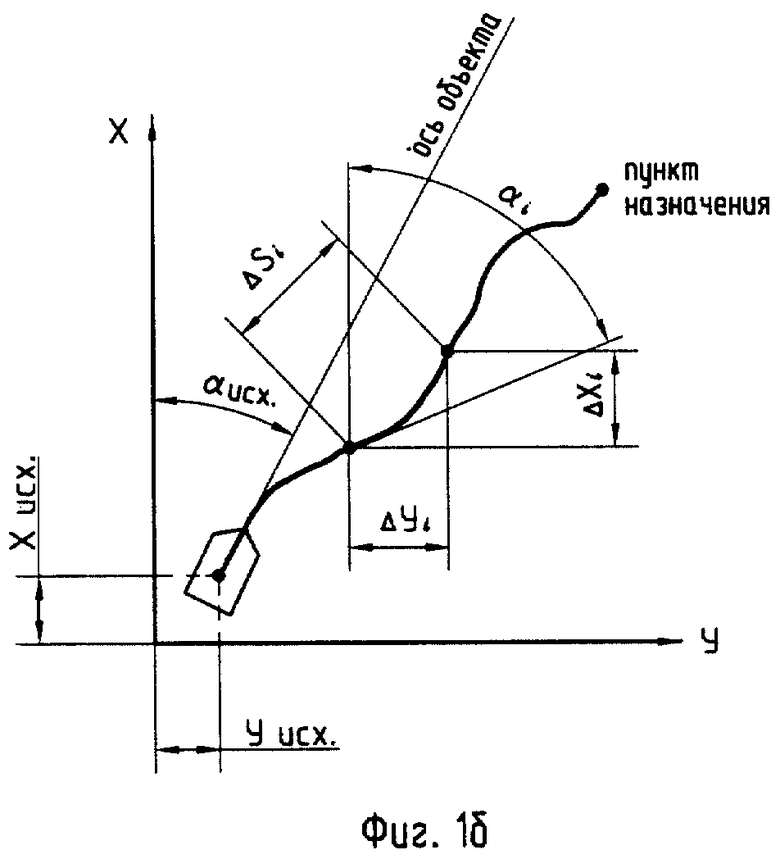
Принцип действия аппаратуры в режиме разложения пути на две составляющие поясняется на Фиг.1б.
Разложение отрезков пути ΔSi на составляющие проводится в прямоугольной системе координат, оси которой параллельны линиям сетки топографической карты.
Значение дирекционного угла объекта αi непрерывно определяется аппаратурой как сумма исходного дирекционного угла и приращений дирекционного угла Δαi, полученных за время движения объекта от исходной точки до текущей

Элементарные отрезки пути ΔSi и приращения дирекционного угла объекта Δαi непрерывно измеряются аппаратурой, а исходные координаты Хисх, Yисх и дирекционный угол αисх определяются оператором с помощью дополнительных средств, не входящих в состав аппаратуры, и вводятся в нее при первоначальном ориентировании в исходном пункте.
Задача по определению дирекционного угла на пункт назначения решается в аппаратуре на синусно-косинусном вращающемся трансформаторе (СКВТ) с использованием электромеханической синхронной следящей системы. Исходя из того, что если на статорные обмотки СКВТ подать напряжение, пропорциональное разностям координат пункта назначения и объекта,

то угловое положение ротора СКВТ будет моделировать дирекционный угол на пункт назначения.
В исходном пункте марша в аппаратуру вводятся исходные разности координат пункта назначения и объекта ΔXпнисх, ΔYпнисх.
В процессе движения приращения координат, вычисленные аппаратурой в результате решения задачи по определению координат объекта, используются как приращения разностей координат пункта назначения и объекта. В результате обеспечивается непрерывное вычисление значений αпнi.
Работа известной аппаратуры при определении координат, дирекционного угла объекта и дирекционного угла на пункт назначения поясняется функциональной схемой, представленной на Фиг.1а.
Перед началом движения определяются исходные координаты и дирекционный угол объекта и вводятся в счетные устройства координатора.
Перекрестие визирных нитей планшета устанавливается в точку местоположения объекта на топографической карте. Вычисляются разности координат пункта назначения и объекта в исходном пункте и вводятся в счетчики ΔХ и ΔY координатора.
По введенным разностям координат пункта назначения и объекта в соответствии с формулами (6) и (7) в координаторе автоматически вычисляется и индицируется значение дирекционного угла на пункт назначения.
Сигналы механического датчика, несущие информацию о пройденном пути, преобразуются в формирователе в импульсы прямоугольной формы и поступают в координатор. Каждый импульс используется как элементарный отрезок пути ΔSi при разложении в соответствии с формулами (1) и (2).
Информация об изменении дирекционного угла продольной оси объекта вырабатывается в гирокурсоуказателе курсовой системы.
По линии синхронной связи она поступает в координатор, где суммируется с исходным дирекционным углом объекта в соответствии с формулой (5), а результат индицируется на шкалах КУРС координатора и на шкале курсоуказателя, сигнал для которого постоянно вырабатывается в координаторе.
В координаторе элементарные отрезки пути раскладываются на составляющие в соответствии с формулами (1) и (2). Полученные приращения координат ΔXi и ΔYi поступают на счетчики X, Y, ΔХ, ΔY координатора, где суммируются со значениями исходных координат в соответствии с формулами (3), (4) и со значениями исходных разностей координат пункта назначения и объекта в исходном пункте. Одновременно приращения координат поступают в индикаторный планшет, где с приходом каждого импульса меняется положение перекрестия визирных нитей, указывающих новое положение объекта на карте.
В соответствии с изменившимися значениями разностей координат пункта назначения и объекта в координаторе вычисляется дирекционный угол на пункт назначения от нового местоположения объекта.
Наряду с достоинствами известной навигационной системы ТНА-4, такими как автономность функционирования, простота реализации алгоритма выработки навигационных параметров, низкая стоимость аппаратуры, она имеет много недостатков, как например: низкая точность определения координат местоположения объекта.
Низкая точность обусловлена, во-первых, невысокой предельно достижимой точностью удержания текущего дирекционного угла объекта гироскопическим измерителем курса, во-вторых, зависимостью погрешности определения координат от времени работы и расстояния, пройденного объектом, что связано с принципом построения известной навигационной системы по методу счисления пути. Предельно достигаемая точность удержания текущего дирекционного угла для используемого гироскопического измерителя на базе трехстепенного астатического гироскопа составляет (0,3-0,4) град/ч, в сравнении более совершенные системы, например на базе ДНГ, обеспечивают удержание (0,1-0,2) град/ч. Погрешность определения координат известной системы составляет 0,7% от пройденного пути за 7 часов движения, то при скорости движения объекта 40 км/ч абсолютная ошибка в определении координаты за 7 ч пройденного пути составит:

В сравнении, спутниковая навигационная система (СНС) позволяет обеспечить определение координат местоположения объекта с погрешностью 20 метров, независимо от времени и расстояния.
Другим существенным недостатком известной навигационной системы является ограниченный ряд функциональных возможностей аппаратуры, а именно невозможность автоматического перевода геодезической системы координат в систему координат Гаусса-Крюгера и обратно, отображения угла и дальности до цели при стрельбе с закрытых позиций, отображения видеоинформации с источника видеосигнала и т.д. Все это обусловлено применением аналоговых электромеханических элементов схемы.
Целью изобретения является повышение точности гироскопической навигационной системы на базе трехстепенного астатического гироскопа путем введения коррекции от внешних источников навигационной информации, таких как спутниковая навигационная система, и расширение функциональных возможностей системы за счет широкого применения микропроцессорной техники и использования цифровой электронной карты местности.
Указанная цель достигается тем, что в известную навигационную систему, содержащую гироскопический измеритель курса (гирокурсоуказатель или гирокурсоизмеритель) на базе трехстепенного астатического гироскопа, ось ротора которого удерживается в плоскости горизонта системой горизонтальной коррекции, с датчиком угла на оси наружной рамы карданова подвеса, преобразователь напряжения постоянного тока в трехфазное напряжение переменного тока, координатор как вычислитель навигационных параметров и преобразователь информации и управления, датчик пути с формирователем импульсов, согласно изобретению дополнительно введены антенна и приемник спутниковой навигационной системы (СНС), в гирокурсоизмерителе в качестве датчика угла применен редуктосин с аналого-цифровым преобразователем (АЦПВТ), а в качестве устройства управления режимами работы и вычислителя применена микроЭВМ, выход редуктосина (АЦПВТ) и выход формирователя импульсов датчика пути подключены к соответствующим входам микроЭВМ, выходы которой подключены или к внешним устройствам обработки информации и управления, например к информационно-управляющему комплексу объекта, или к входу электронного картографа, в качестве преобразователя напряжения постоянного тока в трехфазное напряжение переменного тока применен электронный преобразователь напряжения, также установленный в корпусе гирокурсоизмерителя.
Таким образом, в предлагаемой гироскопической навигационной системе для подвижных объектов на базе астатического гироскопа с использованием метода счисления пути реализуется комбинированная навигационная аппаратура с автономным режимом от ГКИ, с режимом работы с применением СНС и интегрированным режимом работы, то есть с коррекцией текущих координат автономного канала по более точной информации спутникового канала, что обеспечивает повышение точности аппаратуры, а применение элементов микропроцессорной техники, использование картографа с цифровой электронной картой местности позволяет расширить функциональные возможности аппаратуры за счет возможности реализовать обработку сигналов по дополнительным алгоритмам для решения дополнительных навигационных задач.
От прототипа заявляемая гироскопическая навигационная система для подвижных объектов отличается тем, что:
- дополнительно применены антенна и приемник спутниковой навигационной системы;
- в качестве датчика угла на оси наружной рамы карданова подвеса гирокурсоизмерителя применен редуктосин АЦПВТ;
- в качестве преобразователя информации и управления применена микроЭВМ, установленная в корпусе гирокурсоизмерителя, с подключением к соответствующим входам микроЭВМ выходов АЦПВТ и формирователя импульсов датчика пути;
- в качестве преобразователя напряжения постоянного тока в трехфазное напряжение переменного тока применен электронный преобразователь, установленный в корпусе гирокурсоизмерителя;
- дополнительно применен электронный картограф, содержащий, картографический процессор, электронный индикатор (дисплей), панель управления и загрузочное устройство.
Проведенный анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации и выявление источников, содержащих сведения об аналогах заявляемого технического решения, позволил установить, что не обнаружено аналогов, характеризующихся признаками, тождественными всем существенным признакам заявляемой гироскопической навигационной системы. Это позволяет сделать вывод о соответствии заявляемой системы критерию «новизна».
Сравнение заявляемой гироскопической навигационной системы с другими техническими решениями показывает, что отдельные отличительные признаки в технике широко известны. Так известно применение астатического гироскопа, ось собственного вращения которого установлена в горизонтальном положении в качестве гироскопа направления [4]. Известно применение коррекции от СНС на примере бесплатформенной инерциальной навигационной системы на базе лазерных гироскопов для измерения угловых параметров железнодорожной колеи [5]. Известно использование цифровых карт дорог для повышения качества решения задач навигации [6]. Однако не обнаружено применение указанных признаков в данной взаимосвязи с другими признаками для достижения вышеуказанного технического результата, следовательно, заявляемая гироскопическая навигационная система для подвижных объектов соответствует критерию «изобретательский уровень».
На Фиг.1а и 1б изображена навигационная система - прототип.
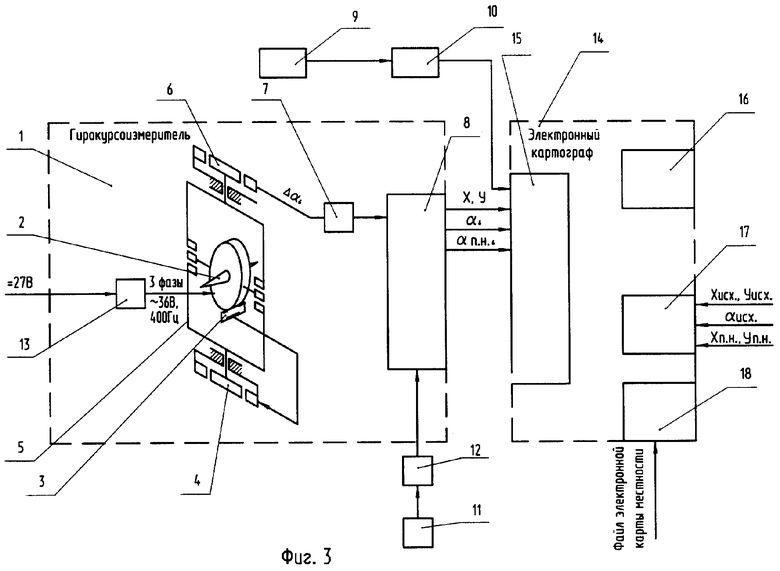
На Фиг.2 и 3 изображена заявляемая гироскопическая навигационная система для подвижных объектов.
Система содержит гирокурсоизмеритель (ГКИ) 1 на базе трехстепенного астатического гироскопа, ось 2 собственного вращения которого удерживается в плоскости горизонта системой горизонтальной коррекции, состоящей из датчика жидкостного маятникового 3 как чувствительного элемента горизонтальной плоскости и моментного двигателя 4 как исполнительного элемента, на оси наружной рамы 5 установлен в качестве датчика угла редуктосин 6, выход редуктосина подключен ко входу аналого-цифрового преобразователя (АЦПВТ) 7, выход которого подключен ко входу микроконтроллера 8, обеспечивающего функции преобразователя информации и управления и размещенного в корпусе ГКИ. Антенна 9 и приемник 10 спутниковой навигационной системы (СНС) обеспечивают получение навигационной информации по спутниковому каналу. Датчик пути - одометр 11 и формирователь 12 обеспечивают получение информации по пройденному пути, выход преобразователя подключен к соответствующему входу микроконтроллера 8. В корпусе ГКИ установлен электронный преобразователь 13, обеспечивающий питание ГКИ.
Навигационная информация с выхода микроконтроллера 8 поступает к внешним устройствам обработки информации и управления, как показано на Фиг.2, или на вход электронного картографа 14, как показано на Фиг.3. Картограф 14 состоит из картографического процессора 15, электронного индикатора (дисплея) 16, панели управления 17 и устройства загрузки 18.
К соответствующему входу микроконтроллера 15 подключен выход приемника 10 (СНС).
Заявляемая система работает следующим образом.
Перед использованием аппаратуры дополнительными средствами, не входящими в комплект аппаратуры, проводится подготовка исходных данных, а именно: определяются координаты исходного пункта маршрута Хисх, Yисх, дирекционный угол с исходной точки αор, координаты пункта назначения.
После включения аппаратуры с панели управления 17 картографа 14 оператором производится ввод исходных данных и через устройство загрузки 18 производится загрузка в картографический процессор 15 электронной карты необходимой местности. По варианту, представленному на фиг.2, ввод исходных данных производится с внешнего устройства обработки информации и управления объекта.
Аппаратура может работать в трех режимах: автономном, спутниковом и интегрированном.
В автономном режиме сигнал с редуктосина 6, соответствующий величине изменения дирекционного угла объекта, поступает на вход АЦПВТ 7, который в свою очередь передает значение угла в параллельном коде на соответствующий вход микроЭВМ 8. Сигналы датчика пути 11, несущие информацию о пройденном объектом пути, преобразуются в формирователе 12 в импульсы прямоугольной формы и поступают на соответствующий вход микроЭВМ 8 для последующего использования в качестве элементарных отрезков ΔSi при разложении в соответствии с формулами (1) и (2). Сигналы с АЦПВТ 7 и формирователя 12 воспринимаются микроЭВМ 8 как входная информация и обрабатывается по необходимым для этих сигналов алгоритмам, при этом по сигналу от АЦПВТ 7 определяются приращения дирекционного угла Δαi, после чего рассчитывается текущее значение дирекционного угла объекта αi как сумма исходного дирекционного угла αисх и приращений дирекционного угла Δαi, полученных за время движения объекта от исходной точки до текущей, по формуле (5).
Элементарные отрезки пути ΔS раскладываются на составляющие в соответствии с формулами (1) и (2), суммируются со значениями исходных координат в соответствии с формулами (3) и (4) и со значениями исходных разностей координат пункта назначения и объекта в исходном пункте. В соответствии с изменившимися значениями разностей координат пункта назначения и объекта в микроЭВМ 8 по соответствующим алгоритмам вычисляется дирекционный угол на пункт назначения от нового местоположения объекта. Таким образом, на выходе микроЭВМ 8 имеется информация о текущих координатах и дирекционном угле объекта, координатах цели, дирекционном угле на пункт назначения и дальности до него, которая поступает к внешним устройствам обработки информации и управления или на вход картографа 14.
В режиме спутниковой навигации определение координат объекта обеспечивает приемник СНС, конструктивно размещенный в картографе. Антенна приемника 9 принимает сигналы от навигационных космических аппаратов (НКА) и передает в приемник СНС 10 для расчета координат. Координаты объекта рассчитываются по псевдодальностям до НКА. Псевдодальности рассчитываются по временным задержкам Ti «i-й НКА-потребитель» и известной скорости распространения радиоволн с:
Di=сТi.
Ti измеряются в результате сопоставления принятых псевдослучайных кодов и генерируемых в приемнике копий этих кодов с учетом априори известных моментов излучений сигналов НКА.
Найденные в ходе навигационных определений прямоугольные геоцентрические координаты X, Y, Z преобразуются в координаты Гаусса-Крюгера и передаются в картографический процессор для отображения местоположения объекта на экране картографа на фоне электронной карты.
В интегрированном режиме на соответствующие входы микроЭВМ 8 поступают сигналы с выходов АЦПВТ 7, формирователя 12. Полученная после обработки в микроЭВМ навигационная информация передается в картографический процессор картографа, где в совокупности с информацией с приемника 10 о координатах объекта при их совместной обработке позволяет:
- обеспечить повышение точности выдачи угловой информации;
- реализовать практически непрерывный процесс коррекции за счет применения двух разнородных источников информации;
- производить оценку и калибровку дрейфа ГКИ;
- производить оценку погрешностей датчика пути и тем самым повысить точность определения текущих координат.
Электронный картограф 14 в составе предлагаемого варианта аппаратуры выполняет следующие функции:
- выбора режима работы аппаратуры (автономный, спутниковый, интегрированный);
- ввода исходных и промежуточных навигационных параметров;
- определение координат местоположения объекта по информации глобальных навигационных спутниковых систем «ГЛОНАС» и «NAVSTAR»;
- вычисление дальности и дирекционного угла на пункт назначения;
- вычисление координат целей (ориентиров) по дальности и углу;
- отображение в цифровом виде текущих координат и дирекционного угла объекта, координат цели, а также дирекционного угла на пункт назначения и дальности до него;
- автоматического определения коэффициента коррекции пути и поправки визирного устройства при юстировке на мерном участке;
- отображения на электронной карте текущего местоположения объекта с направлением на пункт назначения и на цель;
- отображения на электронной карте местоположения целей и пункта назначения;
- прорисовки на карте траектории движения объекта;
- отображения угла и дальности до цели при стрельбе по закрытым позициям;
- перевод геодезической системы координат в систему Гаусса-Крюгера (в прямоугольную систему координат) и обратно;
- отображения на экране видеоинформации с источника видеосигнала и тепловизионного прицела.
Использование в аппаратуре микропроцессорной базы позволяет реализовать наличие опции информационных каналов. RS232/485, CAN, МАНЧЕСТЕР-2.
Таким образом, предлагаемое техническое решение позволяет повысить точность недорогой гироскопической навигационной системы на базе астатического гироскопа за счет введения элементов более точной СНС и реализовать преимущества комбинированной навигационной системы по методу счисления пути и СНС, а именно автономность системы, независимость от природных и погодных условий, помехозащищенность, а за счет введения электронного картографа на микропроцессорной базе с цифровой электронной картой местности существенно повысить информативность отображения тактической обстановки в реальном масштабе времени, повысить функциональные возможности аппаратуры.
В частной реализации предлагаемой системы аппаратура может быть дополнена курсоуказателем с электронным индикатором, позволяющим выполнить функцию дополнительного отображения навигационной информации. С целью сокращения приборного состава приемник СНС может быть размещен в корпусе картографа.
По предложенному техническому решению была разработана конструкторская документация и были изготовлены опытные образцы системы топографического ориентирования (СТО) для подвижных объектов, предназначенной для определения текущего местоположения объекта на земной поверхности и отображения тактической и навигационной информации на электронной карте, в составе ГКИ с использованием редуктосина БВТА 100-С30, преобразователя АЦПВТ-19П-Д1, микроЭВМ 6050 Octagon System, антенны СНС, электронного картографа, конструктивно объединенного с приемником СНС и электронного курсоуказателя. При этом были достигнуты следующие технические характеристики:
1. Погрешность определения координат (СКО)
- в автономном режиме 0,7% от пройденного пути за 7 часов движения;
- в режиме СНС - 10 м;
- в интегрированном режиме - 0.4% от пройденного пути за 7 часов движения.
2. Погрешность удержания текущего дирекционного угла объекта - 0,3 град/ч.
3. Потребляемая мощность - не более 300 Вт.
4. Масса приборов СТО - 25 кг.
Источники информации:
1. Патент РФ 2213937, МПК G01C 19/38.
2. Ю.А.Соловьев «Системы спутниковой навигации», ЭКО-ТРЕНДЗ, Москва, 2000, Инженерная энциклопедия Технологии электронных коммуникаций, стр.52-155.
3. Навигационная аппаратура ТНА-4. Техническое описание ПБ1.590.021 ТО, ФГУП «Саратовский агрегатный завод», г. Саратов.
4. С.С.Ривкин «Теория гироскопических устройств», часть 1-я, Судпромгиз, Ленинград, 1962, с.273-275.
5. Государственный научный центр Российской Федерации. Центральный научно-исследовательский институт «Электроприбор». «XI Санкт-Петербургская международная конференция по интегрированным навигационным системам», 26-28 мая, 2004, Санкт-Петербург, Россия, стр.90-96.
6. Международная общественная организация «Академия навигации и управления движением». Государственный научный центр Российской Федерации. Центральный научно-исследовательский институт «Электроприбор». Санкт-Петербургский Государственный электротехнический Университет «ЛЭТИ». «Навигация и управление движением». Материалы V конференции молодых ученых, Санкт-Петербург, 2004, стр.227-233.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОФУНКЦИОНАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ НАЗЕМНЫХ ОБЪЕКТОВ | 2015 |
|
RU2603821C2 |
| СПОСОБ НАЧАЛЬНОГО ОРИЕНТИРОВАНИЯ ГИРОСКОПИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ДЛЯ НАЗЕМНЫХ ПОДВИЖНЫХ ОБЪЕКТОВ | 2016 |
|
RU2617147C1 |
| Способ ориентирования мобильных объектов относительно объекта с известным дирекционным углом | 2018 |
|
RU2692945C1 |
| БОЕВАЯ МАШИНА | 2010 |
|
RU2442097C1 |
| Аппаратура наземной навигации | 2018 |
|
RU2708550C1 |
| Аппаратура наземной навигации | 2024 |
|
RU2840479C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2395061C1 |
| ГИРОСКОПИЧЕСКОЕ СЛЕДЯЩЕЕ ЗА ЦЕЛЬЮ УСТРОЙСТВО САМОНАВОДЯЩЕЙСЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ РАКЕТЫ | 2009 |
|
RU2397435C1 |
| КОМПЛЕКСНАЯ СПУТНИКОВАЯ НАВИГАЦИОННАЯ АППАРАТУРА | 2005 |
|
RU2294527C1 |
| МОБИЛЬНАЯ СТАНЦИЯ НАЗЕМНОЙ ПОДВИЖНОЙ СЛУЖБЫ | 2008 |
|
RU2371850C1 |
Изобретение относится к области измерительной техники и может быть использовано в системах навигации, топопривязки и ориентирования наземных подвижных объектов. Навигационная система, содержащая гироскопический измеритель курса на базе трехстепенного астатического гироскопа, ось ротора которого удерживается в плоскости горизонта системой горизонтальной коррекции, с датчиком угла на оси наружной рамы карданова подвеса, преобразователь напряжения постоянного тока в трехфазное напряжение переменного тока, вычислитель навигационных параметров и преобразователь информации и управления, датчик пути с формирователем импульсов, антенну и приемник спутниковой навигационной системы. В гирокурсоизмерителе в качестве датчика угла применен редуктосин с аналого-цифровым преобразователем, а в качестве устройства управления режимами работы и вычислителя применена микроЭВМ, выход редуктосина и выход формирователя импульсов датчика пути подключены к соответствующим входам микроЭВМ, выходы которой подключены или к внешним устройствам обработки информации и управления, например к информационно-управляющему комплексу объекта, или к входу электронного картографа, в качестве преобразователя напряжения постоянного тока в трехфазное напряжение переменного тока применен электронный преобразователь напряжения, также установленный в корпусе гирокурсоизмерителя. Технический результат: расширение функциональных возможностей и повышение точности аппаратуры. 4 ил.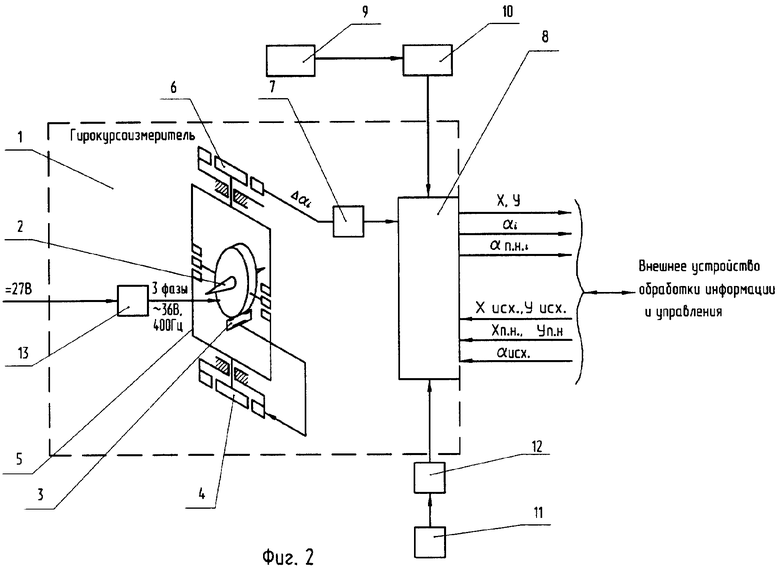
Гироскопическая навигационная система для подвижных объектов, содержащая гироскопический измеритель курса (гирокурсоуказатель или гирокурсоизмеритель) на базе трехстепенного астатического гироскопа, ось ротора которого удерживается в плоскости горизонта системой горизонтальной коррекции, с датчиком угла на оси наружной рамы карданова подвеса, преобразователь напряжения постоянного тока в трехфазное напряжение переменного тока, координатор как вычислитель навигационных параметров и преобразователь информации и управления, датчик пути с формирователем импульсов, отличающаяся тем, что в нее дополнительно введены антенна и приемник спутниковой навигационной системы, в гирокурсоизмерителе в качестве датчика угла применен редуктосин с аналого-цифровым преобразователем (АЦПВТ), а в качестве устройства управления режимами работы и вычислителя применена микроЭВМ, выход редуктосина (АЦПВТ) и выход формирователя импульсов датчика пути подключены к соответствующим входам микроЭВМ, выходы которой подключены или к внешним устройствам обработки информации и управления, например к информационно-управляющему комплексу объекта, или к входу электронного картографа, в качестве преобразователя напряжения постоянного тока в трехфазное напряжение переменного тока применен электронный преобразователь напряжения, также установленный в корпусе гирокурсоизмерителя.
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ определения координат наземного колесного объекта и устройство для его осуществления | 1990 |
|
SU1818534A1 |
| НАЗЕМНАЯ ГИРОСКОПИЧЕСКАЯ СИСТЕМА (ВАРИАНТЫ) | 2002 |
|
RU2213937C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ КУРСА | 2000 |
|
RU2178146C1 |
| JP 2005181272 А, 07.07.2005 | |||
| JP 2002310690 А, 23.10.2002 | |||
| ЕР1092952 A1, 18.04.2001. | |||

