Настоящее изобретение относится к устройству оценки типа поверхности дороги с использованием звуковых сигналов и к способу классификации и обслуживания поверхностей дороги с его использованием, а более конкретно, к устройству для классификации звуковых сигналов, отражаемых на поверхности дороги, с использованием искусственных нейронных сетей и управления поверхностями дороги или движущимися объектами на основе классифицированных поверхностей дороги и к способу обслуживания поверхностей дороги с его использованием.
Уровень техники
В общем, поскольку движущиеся объекты, движущиеся по земле, движутся по плоскости земли, т.е. движутся согласно коэффициенту трения поверхности дороги, важно точно оценивать коэффициент трения поверхности дороги с точки зрения управления устойчивостью и управления максимальными рабочими характеристиками движения.
Авария вследствие гололеда, которая сильно увеличивается зимой, возникает вследствие быстрого изменения коэффициента трения поверхности дороги в ситуации, которая не распознается, и в силу этого можно сказать, что потребность в технологии оценки коэффициента трения демонстрируется в значительной степени.
Помимо этого, технология рекуперативного торможения является существенно важной для увеличения энергоэффективности в электротранспортных средствах, которые коммерциализируются в последнее время, и потребность в технологии для оценки коэффициента трения поверхности дороги заранее растет с точки зрения обеспечения устойчивости вождения, когда применяется рекуперативное торможение.
В качестве способа оценки такого состояния поверхности дороги или коэффициента трения с поверхностью дороги на его основе, в предшествующем уровне техники главным образом используется способ использования динамической информации транспортного средства и способ использования информации считывания.
В случае способа использования динамической информации транспортного средства, информация измерений различных датчиков, смонтированных на транспортном средстве, подставляется в динамическую модель транспортного средства и оценивается. В этом случае, имеется недостаток в том, что точность снижается в ситуации, которая отклоняется от заданного моделирования, и поскольку измерение может выполняться только после проезда по поверхности дороги, коэффициент трения поверхности дороги не может оцениваться заранее.
Помимо этого, в случае способа на основе датчика электромагнитных волн, такого как информация изображений, коэффициент трения поверхности дороги может оцениваться удаленно, но имеется такое ограничение, что результаты могут изменяться в зависимости от положения или направления установки датчика и требуют дорогого оборудования датчиков и устройства обработки сигналов для него.
Между тем, технология оценки поверхности дороги с использованием акустической информации также активно обсуждается, и в предшествующем уровне техники внимание акцентируется на технологии для оценки состояния поверхности дороги на основе звука трения между землей и шиной, и имеется такое ограничение, что точность является недостаточной, и состояние передней части поверхности дороги не может проверяться перед проездом по поверхности дороги.
Следовательно, в традиционном способе, состояние поверхности дороги не может определяться заранее, или процесс определения является неэкономичным и неточным, и имеется такое ограничение, что вышеописанная проблема не может эффективно разрешаться.
Раскрытие изобретения
Техническая задача
Настоящее изобретение направлено на создание устройства и способа оценки типа поверхности дороги с использованием звукового сигнала для решения вышеуказанной проблемы.
Помимо этого, настоящее изобретение направлено на создание устройства и способа управления и обслуживания поверхности дороги в реальном времени посредством оценки типа поверхности дороги согласно настоящему изобретению.
Между тем, технические проблемы, которые должны быть решены в настоящем изобретении, не ограничены вышеуказанными техническими проблемами, и не упомянутые технические проблемы могут быть явным образом понятны специалистам в области техники, к которой относится изобретение, включенное в настоящее описание, из настоящего описания изобретения и прилагаемых чертежей.
Техническое решение
Согласно различным вариантам осуществления настоящего изобретения, электронное устройство для классификации поверхности дороги с использованием звукового сигнала включает в себя: приемо-передающее устройство, выполненное с возможностью передачи и приёма звукового сигнала, датчик состояния атмосферы; и по меньшей мере один процессор, соединенный электронными средствами с приемо-передающим устройством и датчиком состояния атмосферы, при этом по меньшей мере один процессор выполнен с возможностью передачи звукового сигнала к целевой поверхности дороги, удалённой от электронного устройства на первое расстояние, с использованием приемо-передающего устройства, принимать отраженный сигнал звукового сигнала для целевой поверхности дороги с использованием приемо-передающего устройства, получать информацию состояния атмосферы, связанную со звуковым сигналом, с использованием датчика состояния атмосферы, получать первые данные для принимаемого отраженного сигнала, формировать вторые данные посредством коррекции первых данных на основе информации состояния атмосферы, получать третьи данные, связанные с информацией частотной области вторых данных, на основе вторых данных и определять тип целевой поверхности дороги на основе третьих данных и искусственной нейронной сети классификации поверхностей дороги, и при этом искусственная нейронная сеть классификации поверхностей дороги обучается в качестве набора данных частотной области, сформированного на основе звукового сигнала, отражаемого от поверхности дороги на второе расстояние, отличающееся от первого расстояния.
Согласно варианту осуществления настоящего изобретения, вторые данные могут формироваться посредством коррекции первых данных на основе информации состояния атмосферы и первого расстояния.
Помимо этого, первое расстояние может оцениваться на основе времени передачи звукового сигнала и времени приема отраженного сигнала.
Согласно варианту осуществления настоящего изобретения, третьи данные могут получаться посредством преобразования вторых данных в STFT (кратковременное преобразование Фурье).
Согласно варианту осуществления настоящего изобретения по меньшей мере один процессор может быть выполнен с возможностью формирования сигнала для управления устройством обслуживания поверхности дороги, установленным на целевой поверхности дороги, на основе определенного типа целевой поверхности дороги.
Согласно различным вариантам осуществления настоящего изобретения, устройство обслуживания поверхности дороги может включать в себя устройство с нагревательной проволокой или устройство-распылитель соляного раствора.
Согласно варианту осуществления настоящего изобретения по меньшей мере один процессор может быть выполнен с возможностью определения, удовлетворяются ли предварительно установленные погодные условия, и, если предварительно установленные погодные условия удовлетворяются, формирования сигнала для управления устройством обслуживания поверхности дороги.
Помимо этого по меньшей мере один процессор может быть выполнен с возможностью определения, изменяется ли тип целевой поверхности дороги, определенный в первое время, во второе время, и если первый класс, определенный в качестве типа целевой поверхности дороги в первое время, и второй класс, определенный в качестве типа целевой поверхности дороги во второе время, отличаются, определения необходимости формирования сигнала для управления устройством, установленным на целевой поверхности дороги, на основе типа целевой поверхности дороги, определенного в третье время.
Согласно варианту осуществления настоящего раскрытия сущности, тип целевой поверхности дороги может определяться в каждом первом периоде, и по меньшей мере один процессор может быть выполнен с возможностью определения типа целевой поверхности дороги в каждом втором периоде, когда тип целевой поверхности дороги определён как первый класс.
Согласно варианту осуществления настоящего изобретения, электронное устройство дополнительно может включать в себя по меньшей мере одно из IR-датчика для получения информации температуры целевой поверхности дороги или видеодатчика для получения информации изображений целевой поверхности дороги, и по меньшей мере один процессор может быть выполнен с возможностью определения типа поверхности дороги дополнительно на основе информации температуры или информации изображений.
Согласно различным вариантам осуществления настоящего изобретения, способ классификации поверхности дороги с использованием звукового сигнала, осуществляемый посредством электронного устройства, включает в себя передачу звукового сигнала к целевой поверхности дороги, удалённой от электронного устройства на первое расстояние; прием сигнала отражения звукового сигнала для целевой поверхности дороги; получение информации состояния атмосферы, связанной со звуковым сигналом; получение первых данных для принимаемого отраженного сигнала; формирование вторых данных посредством коррекции первых данных на основе информации состояния атмосферы; получение третьих данных, связанных с информацией частотной области вторых данных, на основе вторых данных; и определение типа целевой поверхности дороги на основе третьих данных и искусственной нейронной сети классификации поверхностей дороги, при этом искусственная нейронная сеть классификации поверхностей дороги может обучаться в качестве набора данных частотной области, сформированного на основе звукового сигнала, отражаемого от поверхности дороги на второе расстояние, отличающееся от первого расстояния.
Преимущества изобретения
Согласно настоящему изобретению, посредством быстрой и точной классификации типов поверхностей дороги на основе ультразвукового сигнала, поверхности дороги, классифицированные согласно управлению или управлению транспортным средством, могут предотвращать аварии без участия людей.
Помимо этого, согласно настоящему изобретению, посредством автоматического управления обслуживанием поверхности дороги с использованием информации классификации поверхностей дороги, поверхность дороги может содержаться экономично и эффективно.
Помимо этого, настоящее изобретение может обеспечивать более эффективную информацию транспортной сети пользователю посредством получения информации относительно поверхностей дороги в реальном времени.
Между тем, преимущества настоящего изобретения не ограничены вышеописанными преимуществами, и преимущества, которые не упомянуты, могут быть в явном виде поняты специалистами в области техники, к которой относится настоящее изобретение, из подробного описания и прилагаемых чертежей.
Краткое описание чертежей
Фиг. 1 является блок-схемой устройства классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения.
Фиг. 2 является схемой, иллюстрирующей то, что устройство классификации поверхностей дороги согласно варианту осуществления настоящего изобретения установлено и работает в дорожной инфраструктуре.
Фиг. 3 является блок-схемой, иллюстрирующей способ, осуществляемый посредством устройства классификации поверхностей дороги согласно настоящему изобретению.
Фиг. 4 является схемой, иллюстрирующей звуковой сигнал, передаваемый из устройства классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения на временной оси.
Фиг. 5 является схемой, иллюстрирующей интервал передачи звукового сигнала и интервал приема отраженного сигнала согласно варианту осуществления настоящего изобретения.
Фиг. 6 является схемой, иллюстрирующей объект, в котором устанавливается устройство классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения.
Фиг. 7 является схемой, иллюстрирующей способ получения набора данных для обучения искусственной нейронной сети классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения.
Фиг. 8 является блок-схемой, иллюстрирующей процесс предварительной обработки отраженного сигнала, принимаемого посредством устройства классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения.
Фиг. 9 является схемой, иллюстрирующей многомодальную искусственную нейронную сеть согласно варианту осуществления настоящего изобретения.
Фиг. 10 является блок-схемой, иллюстрирующей операцию изменения операции управления на основе заданного триггера изменения управления посредством устройства классификации поверхностей дороги согласно варианту осуществления настоящего изобретения.
Фиг. 11 является схемой, иллюстрирующей сценарий, в котором результаты классификации поверхностей дороги изменяются согласно варианту осуществления настоящего изобретения.
Фиг. 12 является схемой, иллюстрирующей способ обслуживания поверхности дороги посредством устройства классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения.
Фиг. 13 является схемой, иллюстрирующей то, что устройство классификации поверхностей дороги согласно варианту осуществления настоящего изобретения собирает информацию дорожного движения.
Фиг. 14 является схемой конфигурации устройства оценки типов поверхностей дороги согласно варианту осуществления настоящего изобретения.
Фиг. 15 является схемой для пояснения передаваемого сигнала и принимаемого сигнала в устройстве оценки типов поверхностей дороги с использованием звуков согласно варианту осуществления настоящего изобретения.
Фиг. 16 является схемой для примерной иллюстрации преобразователя сигналов в устройстве оценки типов поверхностей дороги с использованием звуков согласно варианту осуществления настоящего изобретения.
Фиг. 17 является схемой для пояснения искусственной нейронной сети в устройстве оценки типов поверхностей дороги с использованием звуков согласно варианту осуществления настоящего изобретения.
Фиг. 18 является схемой для пояснения работы блока выполнения свертки.
Фиг. 19 является схемой для описания кода блока выполнения свертки устройства оценки типов поверхностей дороги с использованием звуков настоящего изобретения.
Фиг. 20 является блок-схемой способа оценки типа поверхности дороги с использованием преобразования области звуков согласно варианту осуществления настоящего изобретения.
Фиг. 21 является блок-схемой, иллюстрирующей вариант осуществления способа оценки типа поверхности дороги с использованием звуков согласно настоящему изобретению.
Фиг. 22 является блок-схемой, иллюстрирующей способ оценки типа поверхности дороги с использованием звуков, скорректированных для ослабления в атмосфере, согласно варианту осуществления настоящего изобретения.
Фиг. 23 является схемой для пояснения системы мониторинга дорожных условий, оснащенной видеодатчиком и звуковым датчиком согласно варианту осуществления настоящего изобретения.
Фиг. 24 является схемой конфигурации системы мониторинга дорожных условий, включающей в себя видеодатчик и звуковой датчик согласно варианту осуществления настоящего изобретения.
Фиг. 25 является схемой, иллюстрирующей пример распознавания состояния однородной поверхности дороги в системе мониторинга состояния дороги, содержащей видеодатчик и звуковой датчик согласно варианту осуществления настоящего изобретения.
Фиг. 26 является схемой, иллюстрирующей пример распознавания состояния неоднородной поверхности дороги в системе мониторинга состояния дороги, содержащей видеодатчик и звуковой датчик согласно варианту осуществления настоящего изобретения.
Фиг. 27 является схемой для пояснения способа определения местоположения зоны сегментации звукового датчика в системе мониторинга состояния дороги, содержащей видеодатчик и звуковой датчик согласно варианту осуществления настоящего изобретения.
Фиг. 28 является схемой для пояснения примера искусственной нейронной сети системы мониторинга состояния дороги, содержащей видеодатчик и звуковой датчик согласно варианту осуществления настоящего изобретения.
Фиг. 29 является схемой для пояснения примера блока обработки сегментации системы мониторинга состояния дороги, содержащей видеодатчик и звуковой датчик согласно варианту осуществления настоящего изобретения.
Фиг. 30 является блок-схемой способа мониторинга в системе мониторинга состояния дороги, содержащей видеодатчик и звуковой датчик согласно варианту осуществления настоящего изобретения.
Фиг. 31 является подробной блок-схемой для варианта осуществления этапа 3050 анализа посредством объединения по фиг. 30.
Фиг. 32 является схемой конфигурации системы мониторинга состояния дороги, содержащей видеодатчик и звуковой датчик согласно другому варианту осуществления настоящего изобретения.
Фиг. 33 является блок-схемой другого варианта осуществления способа мониторинга в системе мониторинга состояния дороги, содержащей видеодатчик и звуковой датчик согласно варианту осуществления настоящего изобретения.
Фиг. 34 является схемой для пояснения работы системы управления дорожного устройства с нагревательной проволокой согласно варианту осуществления настоящего изобретения.
Фиг. 35 является схемой конфигурации системы управления устройства предотвращения замерзания дороги согласно варианту осуществления настоящего изобретения.
Фиг. 36 является схемой конфигурации системы управления устройства предотвращения замерзания дороги согласно другому варианту осуществления настоящего изобретения.
Фиг. 37A-37C являются схемами для пояснения аналитической модели на основе искусственного интеллекта, используемой в системе управления устройства предотвращения замерзания дороги согласно варианту осуществления настоящего изобретения.
Фиг. 38 является блок-схемой способа управления устройства предотвращения замерзания дороги согласно варианту осуществления настоящего изобретения.
Фиг. 39 является подробной блок-схемой для варианта осуществления этапа 3850 формирования управляющих сигналов по фиг. 38, когда устройство предотвращения замерзания дороги представляет собой устройство с нагревательной проволокой согласно варианту осуществления настоящего изобретения.
Фиг. 40 является подробной блок-схемой для варианта осуществления этапа (3850) формирования управляющих сигналов по фиг. 38, когда устройство предотвращения замерзания дороги представляет собой устройство-распылитель соляного раствора согласно варианту осуществления настоящего изобретения.
Фиг. 41 является видом в перспективе, схематично иллюстрирующим конструктивную структуру для установки дорожных инфраструктурных датчиков согласно варианту осуществления настоящего изобретения.
Фиг. 42 является видом сбоку, схематично иллюстрирующим конструктивную структуру для установки дорожных инфраструктурных датчиков согласно варианту осуществления настоящего изобретения.
Фиг. 43 является схематичным видом в перспективе (a) и видом в перспективе в частичном поперечном сечении (b), иллюстрирующими блок звуковых датчиков согласно варианту осуществления настоящего изобретения.
Фиг. 44 является видом сбоку в поперечном сечении, схематично иллюстрирующим блок звуковых датчиков согласно варианту осуществления настоящего изобретения.
Фиг. 45 является видом в перспективе, схематично иллюстрирующим конструктивную структуру для установки дорожных инфраструктурных датчиков согласно другому варианту осуществления настоящего изобретения.
Фиг. 46 является видом сбоку, схематично иллюстрирующим конструктивную структуру для установки дорожных инфраструктурных датчиков согласно другому варианту осуществления настоящего изобретения.
Фиг. 47 является частичным укрупненным видом в перспективе (a), видом снизу в перспективе (b) и видом в перспективе в частичном поперечном сечении (b), схематично иллюстрирующими конструктивную структуру для установки дорожных инфраструктурных датчиков согласно другому варианту осуществления настоящего изобретения.
Фиг. 48 является видом сбоку в частичном поперечном сечении, схематично иллюстрирующим блок звуковых датчиков согласно другому варианту осуществления настоящего изобретения.
Фиг. 49 является блок-схемой, иллюстрирующей способ конструирования конструктивной структуры для установки дорожных инфраструктурных датчиков согласно предпочтительному варианту осуществления настоящего изобретения.
Осуществление изобретения
Ниже подробно описаны примерные варианты осуществления настоящего изобретения с обращением к прилагаемым чертежам. При описании вариантов осуществления, описание технической сущности, которое известно в области техники, к которой относится настоящее изобретение, и не относится непосредственно к настоящему изобретению, не приводится. Это служит для ясной передачи сущности настоящего изобретения за счет пропуска необязательного описания.
По тем же причинам, некоторые компоненты чрезмерно увеличиваются, не приводятся или схематично иллюстрируются на прилагаемых чертежах. Помимо этого, размер каждого компонента не полностью отражает фактический размер. На каждом чертеже одинаковым или соответствующим компонентам присвоены одинаковые ссылочные позиции.
Преимущества и признаки настоящего изобретения, а также способы их достижения должны становиться очевидными через варианты осуществления, подробно описанные ниже с прилагаемыми чертежами. Тем не менее, следует понимать, что вопрос, раскрытый из чертежей, не указывает или ограничивает различные варианты осуществления, и что все изменения, эквиваленты и альтернативы, включенные в сущность и объем различных вариантов осуществления, включаются. Конкретные структурные или функциональные описания различных вариантов осуществления проиллюстрированы только для целей описания различных вариантов осуществления, и варианты осуществления настоящего изобретения могут осуществляться на практике в различных формах и не должны истолковываться как ограниченные вариантами осуществления, явно описанными в этом описании изобретения или в заявке.
Иными словами, варианты осуществления настоящего изобретения представлены таким образом, что настоящее описание является доскональным и обеспечивает данный объем настоящего изобретения для специалистов в области техники, к которой относится настоящее изобретение, и изобретение по настоящему описанию определяется лишь объемом формулы изобретения. Во всем подробном описании одинаковые ссылочные позиции обозначают одинаковые компоненты.
Такие термины, как «первый» и/или «второй», могут использоваться для описания различных компонентов, но компоненты не должны быть ограничены терминами. Термины служат лишь для различения одного компонента и другого компонента, например, первый компонент может называться «вторым компонентом» и, аналогичным образом, второй компонент может называться «первым компонентом», без отступления от объема настоящего замысла.
Следует понимать, что, если элемент упоминается как «соединенный» или «связанный» с другим компонентом, он может быть непосредственно соединен или соединён с другим компонентом, но между ними могут присутствовать и другие компоненты. С другой стороны, если элемент упоминается как «непосредственно соединенный» или «непосредственно связанный» с другим компонентом, следует понимать, что между ними отсутствуют другие компоненты. Так же должны интерпретироваться и другие выражения, которые описывают взаимосвязь между компонентами, которые находятся «между» и «непосредственно между» или «граничат с» и «непосредственно граничат с»,.
На чертежах каждый этап чертежей блок-схемы обработки и сочетания чертежей блок-схемы могут выполняться посредством компьютерных программных инструкций. Поскольку эти компьютерные программные инструкции могут монтироваться в процессоре компьютера общего назначения, компьютера специального назначения или другом программируемого устройства обработки данных, инструкции, выполняемые через процессор компьютера или другого программируемого устройства обработки данных, создают средство для выполнения функций, описанных на этапе(ах) блок-схемы. Поскольку эти компьютерные программные инструкции могут сохраняться в используемом компьютером или машиночитаемом запоминающем устройстве, которое может направлять компьютер или другое программируемое устройство обработки данных с возможностью реализации функции конкретным способом, инструкции, сохраненные в используемом компьютером или машиночитаемом запоминающем устройстве, могут формировать продукт производства, содержащий средство инструктирования для выполнения функций, описанных на этапе(ах) блок-схемы. Поскольку компьютерные программные инструкции могут монтироваться на компьютере или другом программируемом устройстве обработки данных, инструкции, выполняющие функции, описанные на этапе(ах) блок-схемы, могут быть обеспечены в компьютере или другом программируемом устройстве обработки данных посредством формирования исполняемого компьютером процесса посредством выполнения последовательности рабочих этапов на компьютере или другом программируемом устройстве обработки данных.
Помимо этого, каждый этап может представлять модуль, сегмент или часть кода, включающего в себя одну или более выполняемых инструкций для выполнения указанной логической функции(й). Помимо этого, следует отметить, что в некоторых альтернативных реализациях, функции, упомянутые на этапах, могут возникать не по порядку. Например, два этапа, показанные последовательно, могут выполняться практически одновременно, либо этапы могут выполняться в обратном порядке согласно функциям, соответствующим временам.
Термин «блок», используемый в данном описании, означает программные или аппаратные компоненты, такие как программируемая пользователем вентильная матрица (FPGA) или специализированная интегральная схема (ASIC). «Блок» выполняет конкретные роли, но не ограничен программным обеспечением или аппаратными средствами. «Блок» может быть выполнен с возможностью нахождения на носителе данных, который может адресоваться или выполнен с возможностью воспроизведения одного или более процессоров. Соответственно, согласно некоторым вариантам осуществления, «блок» включает в себя такие компоненты, как программные компоненты, объектно-ориентированные программные компоненты, компоненты классов и компоненты задач, процессы, функции, атрибуты, процедуры, вложенные процедуры, сегменты программного кода, драйверы, микропрограммное обеспечение, микрокод, схемы, данные, базу данных, структуры данных, таблицы, массивы и переменные. Функции, предусмотренные в компонентах и «блоках», могут комбинироваться в меньшее число компонентов и «блоков» либо дополнительно разделяться на дополнительные компоненты и «блоки». Помимо этого, компоненты и «блоки» могут быть реализованы таким образом, чтобы воспроизводить один или более CPU в устройстве или в защищенной мультимедийной карте. Помимо этого, согласно различным вариантам осуществления настоящего изобретения, «блок» может включать в себя один или более процессоров.
Ниже в данном документе подробно описаны принципы работы настоящего изобретения с обращением к прилагаемым чертежам. При описании настоящего изобретения ниже по тексту, подробное описание связанных известных функций или конструкций не приводится, если это сможет привести к излишнему затруднению понимания сущности настоящего изобретения. Помимо этого, термины, описанные ниже, представляют собой термины, заданные с учетом функций в настоящем описании, которые могут варьироваться в зависимости от намерения либо привычек пользователя или оператора. Следовательно, определение должно осуществляться на основе контента в этом подробном описании.
Настоящее изобретение относится к системе для классификации поверхности дороги с использованием звукового сигнала и обслуживания поверхности дороги или работы транспортного средства через него.
Устройство классификации поверхностей дороги согласно варианту осуществления настоящего изобретения может включать в себя устройство, установленное в дорожной инфраструктуре или в движущихся объектах и определяющее тип или состояние поверхности дороги.
Устройство классификации поверхностей дороги согласно другому варианту осуществления настоящего изобретения может включать в себя серверное устройство, которое определяет тип или состояние поверхности дороги на основе информации, принимаемой из устройства, установленного в дорожной инфраструктуре или в движущихся объектах.
Фиг. 1 является блок-схемой устройства классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения.
Обращаясь к фиг. 1, устройство 100 классификации поверхностей дороги согласно варианту осуществления настоящего изобретения может включать в себя приемо-передающий блок 110, блок 120 считывания и контроллер 130. Между тем, устройство классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения может включать в себя дополнительные компоненты в дополнение к аппаратным компонентам, описанным выше, и не ограничено компонентами, проиллюстрированными на фиг. 1. Фиг. 1 является схемой для иллюстрации аппаратных компонентов, составляющих устройство 100 классификации поверхностей дороги настоящего изобретения, и устройство классификации поверхностей дороги согласно другому варианту осуществления настоящего изобретения может быть сконфигурировано посредством исключения некоторых компонентов, проиллюстрированных на фиг. 1.
Приемо-передающий блок 110 представляет собой аппаратный компонент, заданный с возможностью передачи и приёма звукового сигнала, и может включать в себя передающее устройство (не показано), приемное устройство (не показано) или приемо-передающее устройство (не показано). Ниже в данном документе подробно описано каждое из передающего устройства и приемного устройства, составляющих приемо-передающий блок 110.
Передающее устройство представляет собой устройство, которое формирует и запускает звуковой сигнал, и может располагаться в направлении, в котором звуковой сигнал запускается к поверхности дороги. В этом случае, запущенный звуковой сигнал может включать в себя высокочастотный ультразвуковой сигнал.
Между тем, частота сформированного звукового сигнала может быть фиксированной согласно типу передающего устройства и может быть заданной или переменной посредством пользовательского ввода. Помимо этого, звуковой сигнал может передаваться посредством пользовательского ввода, управления контроллером или сервером либо может передаваться посредством заданного правила, либо может передаваться как один или более сигналов периодически в течение одного цикла. В этом случае, число передаваемых звуков или период передачи может быть переменным.
Приемное устройство представляет собой устройство, которое принимает звуковой сигнал, отражаемый от поверхности дороги, и может располагаться с возможностью приёма звукового сигнала, отражаемого от поверхности дороги.
Между тем, приемное устройство может непосредственно принимать звуковой сигнал, передаваемый из смежного передающего устройства, отличный от отраженного сигнала. Сигнал, непосредственно принимаемый из передающего устройства, представляет собой сигнал, нерелевантный для классификации поверхности дороги, которая должна определяться через устройство классификации поверхностей дороги настоящего изобретения, и этот шумовой сигнал может называться «перекрестными помехами».
Согласно варианту осуществления настоящего изобретения, передающее устройство и приемное устройство могут устанавливаться удалёнными друг от друга, чтобы уменьшить формирование перекрестных помех. Помимо этого, согласно другому варианту осуществления настоящего изобретения, структура может быть дополнительно расположена между передающим устройством и приемным устройством, чтобы уменьшать возникновение возмущающего сигнала (например, перекрестных помех). Структура может формироваться из материала либо их структуры, имеющей физические свойства, чтобы ослаблять или поглощать звуковые сигналы, и может представлять собой электронное устройство, выполненное с возможностью реализации таких физических свойств.
Между тем, передающее устройство и приемное устройство не обязательно физически отличаются в устройстве классификации поверхностей дороги настоящего изобретения и могут реализовываться как одна интегрированная форма, например, приемо-передающее устройство. В нижеприведенном описании, приемо-передающее устройство представляет собой термин, включающий в себя передающее устройство, приемное устройство или приемо-передающее устройство, и приемо-передающее устройство может означать аппаратное устройство, в котором передающее устройство и приемное устройство интегрируются вместе, и может означать включение физически отличающихся передающих устройств и приемных устройств либо каждого из них.
Приемо-передающее устройство может передавать или принимать звуки в пределах диапазона угла ориентации согласно производительности аппаратных средств. Устройство 100 классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения может использовать приемо-передающее устройство, имеющее различный угол ориентации с учетом цели или окружения, в котором устанавливается устройство классификации поверхностей дороги. Например, угол ориентации приемо-передающего устройства, используемого в устройстве классификации поверхностей дороги, расположенном в дорожной инфраструктуре, может быть меньше угла ориентации приемо-передающего устройства, используемого в устройстве классификации поверхностей дороги, установленном в транспортном средстве.
Когда передающее устройство и приемное устройство выполнены с возможностью отличаться друг от друга в устройстве классификации поверхностей дороги, передающее устройство и приемное устройство согласно различным вариантам осуществления настоящего изобретения могут размещаться с учетом угла ориентации между собой. Приемное устройство согласно варианту осуществления настоящего изобретения может располагаться за пределами диапазона угла ориентации передающего устройства, и за счет этого крайний внешний звуковой сигнал угла ориентации, испускаемый посредством передающего устройства, не может считываться в приемном устройстве. Приемное устройство согласно другому варианту осуществления настоящего изобретения может располагаться на внешней стороне на основе центра угла ориентации передающего устройства таким образом, что сигнал перекрестных помех, считываемый посредством приемного устройства, меньше или равен опорному значению.
Между тем, приемо-передающее устройство согласно различным вариантам осуществления настоящего изобретения может проектироваться или размещаться с возможностью реагирования только на конкретную частотную характеристику отраженной волны для поверхности дороги.
Блок 120 считывания представляет собой аппаратный компонент, который получает информацию, необходимую для классификации поверхностей дороги согласно настоящему изобретению посредством измерения, и блок 120 считывания согласно настоящему изобретению может включать в себя датчик состояния атмосферы, камеру и/или IR-датчик.
Блок 120 считывания согласно различным вариантам осуществления настоящего изобретения может включать в себя датчик состояния атмосферы. Датчик состояния атмосферы представляет собой аппаратное устройство для получения информации, связанной с состоянием атмосферы, и информация состояния атмосферы, измеренная или полученная посредством датчика состояния атмосферы, может включать в себя по меньшей мере одно из температуры, влажности или атмосферного давления. Помимо этого, информация состояния атмосферы дополнительно может включать в себя информацию относительно ветра. В этом случае, информация относительно ветра может включать в себя физические величины, связанные с ветром, такие как скорость ветра, сила ветра или направление ветра. В этом описании изобретения, датчик состояния атмосферы может означать устройство, включающее в себя по меньшей мере одно из температурного датчика, датчика влажности или датчика атмосферного давления. Помимо этого, датчик состояния атмосферы может означать устройство, допускающее считывание множества различной информации состояния атмосферы. Датчик состояния атмосферы согласно варианту осуществления настоящего изобретения может измерять температуру, влажность, атмосферное давление и/или скорость ветра места, в котором расположено устройство классификации поверхностей дороги.
Блок 120 считывания согласно различным вариантам осуществления настоящего изобретения дополнительно может включать в себя камеру и/или IR-датчик. Камера представляет собой устройство, которое получает изображение, и может получать информацию изображений на поверхности дороги, и IR-датчик может получать информацию температуры на поверхности дороги посредством обнаружения лучистого тепла, выделяемого из поверхности дороги. Поскольку информация температуры, полученная посредством IR-датчика, представляет собой информацию температуры на поверхности дороги, и информация температуры, полученная посредством датчика состояния атмосферы, представляет собой информацию температуры в атмосфере, значения, указываемые посредством каждой информации температуры, полученной посредством различных датчиков, могут отличаться.
Различная информация, измеренная или полученная посредством блока 120 считывания настоящего изобретения, может использоваться в комбинации, чтобы повышать точность классификации поверхностей дороги. Иными словами, результат классификации поверхностей дороги, выводимый посредством устройства 100 классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения, может формироваться на основе множества данных, и ниже описаны конкретные варианты осуществления этого.
Между тем, согласно варианту осуществления настоящего изобретения, камера и/или IR-датчик, включенные в блок 120 считывания, являются примерными, и блок 120 считывания дополнительно может включать в себя любое считывающее устройство, которое получает информацию, которая может использоваться для того, чтобы классифицировать поверхность дороги, в дополнение к вышеуказанному датчику состояния атмосферы, камере или IR-датчику.
Контроллер 130 выполнен с возможностью осуществления способа, осуществляемого устройством классификации поверхностей дороги по настоящему изобретению, и может включать в себя по меньшей мере один процессор, включающий в себя логическую схему и арифметическую схему. Контроллер 130 может обрабатывать данные согласно программе и/или инструкциям, передаваемым с запоминающего устройства (не показано), и формировать управляющий сигнал согласно результату обработки.
Согласно различным вариантам осуществления, контроллер 130 может управлять по меньшей мере одним другим компонентом (например, аппаратным или программным компонентом) устройства 100 классификации поверхностей дороги, соединенного с контроллером 130, и может выполнять различные операции обработки данных или арифметические операции. Согласно варианту осуществления, в качестве по меньшей мере части операции обработки данных или арифметической операции, контроллер 130 может сохранять команду или данные, принимаемые из другого компонента (например, приемного устройства 120 или блока 120 считывания), в энергозависимом запоминающем устройстве (не показано), обрабатывать команду или данные, сохраненные в энергозависимом запоминающем устройстве (не показано), и сохранять результирующие данные в энергонезависимом запоминающем устройстве (не показано). Например, сигнал, полученный через приемное устройство 120, может преобразовываться в цифровой сигнал через схему аналого-цифрового преобразователя (ADC), включенную в контроллер 130, и обрабатываться. Помимо этого, преобразованный цифровой сигнал может предварительно обрабатываться в качестве входных данных для ввода в искусственную нейронную сеть. Ниже описан конкретный способ обработки принимаемого сигнала и/или данных настоящего изобретения.
Согласно варианту осуществления, контроллер 130 может включать в себя главный процессор (например, центральный процессор (CPU) или процессор приложений (AP)) или вспомогательный процессор (например, графический процессор (GPU), нейронный процессор (NPU), процессор сигналов изображений, процессор концентратора датчиков или процессор связи), который может работать независимо или вместе с главным процессором. Например, когда устройство 100 классификации поверхностей дороги включает в себя главный процессор и вспомогательный процессор, вспомогательный процессор может задаваться с возможностью использования более низкого уровня мощности, чем главный процессор, либо быть конкретным для указанной функции. Вспомогательный процессор может быть реализован отдельно от главного процессора либо в виде его части.
Устройство классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения может включать в себя блок связи (не показан). Блок связи означает аппаратные компоненты, которые принимают команды или данные, вводимые от пользователя или из другого внешнего устройства, передают команды или данные, сформированные посредством устройства классификации поверхностей дороги, наружу, либо передают команды или принимают команды из других компонентов устройства классификации поверхностей дороги, может включать в себя модуль проводной и беспроводной связи и/или интерфейс ввода-вывода. Устройство классификации поверхностей дороги согласно варианту осуществления настоящего изобретения может принимать информацию из внешнего электронного устройства (например, контроллера или сервера обслуживания, установленного за пределами устройства классификации поверхностей дороги) или передавать информацию, сформированную посредством устройства классификации поверхностей дороги, во внешнее электронное устройство. Между тем, блок связи может отдельно реализовываться посредством схемного элемента, включенного в контроллер. Иными словами, устройство классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения может представлять собой устройство, которое обеспечивает информацию, необходимую для классификации поверхности дороги, в сочетании с внешним электронным устройством.
Согласно варианту осуществления настоящего изобретения, искусственная нейронная сеть (не показана) для классификации поверхности дороги настоящего изобретения может быть включена и предусмотрена в контроллере 130 в виде внутримикросхемного программного обеспечения (SOC) или блока микроконтроллера (MCU). В качестве альтернативы, искусственная нейронная сеть может быть предусмотрена в виде программного обеспечения, управляемого контроллером 130 и обновляемого посредством блоком связи из внешнего сервера или посредством пользовательского ввода.
Между тем, искусственная нейронная сеть согласно различным вариантам осуществления настоящего изобретения может реализовываться во внешнем электронном устройстве (например, в контроллере или на сервере), и в этом случае, данные, сформированные на основе звукового сигнала, и данные, необходимые для классификации поверхностей дороги, такие как информация состояния атмосферы, могут передаваться из контроллера 130 устройства классификации поверхностей дороги во внешнее электронное устройство, и внешнее электронное устройство может классифицировать поверхность дороги на основе данных, принимаемых из устройства классификации поверхностей дороги.
Согласно другому варианту осуществления настоящего изобретения, устройство классификации поверхностей дороги может представлять собой серверное устройство. В этом случае, устройство классификации поверхностей дороги может не включать в себя приемо-передающий блок 110 и блок 120 считывания и может принимать данные, необходимые для классификации поверхностей дороги, из внешнего электронного устройства через блок связи (не показан), и может классифицировать поверхность дороги через контроллер 130 на основе принимаемых данных. Помимо этого, результат классификации по классифицированным поверхностям дороги и/или управляющая информация, связанная с ним, могут передаваться во внешнее электронное устройство.
Фиг. 2 является схемой, иллюстрирующей то, что устройство классификации поверхностей дороги согласно варианту осуществления настоящего изобретения устанавливается и работает в дорожной инфраструктуре.
Обращаясь к фиг. 2, устройство 100 классификации поверхностей дороги может устанавливаться обращенным к поверхности 230 дороги, которая должна классифицироваться посредством дорожной инфраструктуры 200.
В настоящем описании дорожная инфраструктура 200 представляет собой общий термин для объектов транспортной инфраструктуры, включающих в себя вертикально ориентированную структуру 210, такую как сигнальный фонарь, уличный светильник, дорожный указательный знак или устройство обработки информации изображений, установленное на обочине, и означает структуру, которая может устанавливаться с устройством классификации поверхностей дороги на дороге и не ограничена вышеприведенным примером. Согласно варианту осуществления настоящего изобретения, тот факт, что устройство 100 классификации поверхностей дороги установлено в дорожной инфраструктуре 200, может означать, что оно установлено на верхнем конце вертикально ориентированной структуры 210, но не ограничен этим.
Дорожная инфраструктура 200 может включать в себя контроллер 220 для управления электронными устройствами, установленными в вертикально ориентированной структуре 210. Электронное устройство, установленное на вертикально ориентированной структуре 210, может включать в себя светоизлучающее устройство, используемое для уличных светильников или сигнальных фонарей, CCTV, камеру для сбора информации дорожного движения или устройство классификации поверхностей дороги настоящего изобретения.
Контроллер 220 представляет собой устройство, которое управляет электронными устройствами, установленными на вертикально ориентированной структуре 210, и, например, может представлять собой контроллер уличного светильника, который управляет работой уличного светильника, когда вертикально ориентированная структура представляет собой уличный светильник, и может представлять собой контроллер сигналов светофора, который управляет сигналом светофора, когда вертикально ориентированная структура представляет собой светофор.
Контроллер 220 согласно различным вариантам осуществления настоящего изобретения может управлять работой устройства 100 классификации поверхностей дороги настоящего изобретения и может управлять поверхностью дороги, в которой расположена дорожная инфраструктура 200, на основе информации классификации поверхностей дороги или команды, полученной из устройства 100 классификации поверхностей дороги.
Контроллер 220 согласно различным вариантам осуществления настоящего изобретения может служить в качестве шлюза между устройством 100 классификации поверхностей дороги и сервером обслуживания (не показан). Иными словами, контроллер 220 может включать в себя модуль проводной/беспроводной связи и передавать информацию, полученную из устройства классификации поверхностей дороги, на сервер обслуживания или принимать команды или данные для управления устройством классификации поверхностей дороги или дорогой из сервера обслуживания.
Контроллер 220 согласно различным вариантам осуществления настоящего изобретения может включать в себя искусственную нейронную сеть настоящего изобретения, и за счет этого поверхность дороги может непосредственно классифицироваться на основе информации, полученной из устройства классификации поверхностей дороги. В этом случае, поскольку производительность процессора или запоминающего устройства, включенного в контроллер 220, может превосходить производительность процессора или запоминающего устройства в устройстве классификации поверхностей дороги, искусственная нейронная сеть, предусмотренная для контроллера 220, может превосходить производительность искусственной нейронной сети, предусмотренной для устройства 100 классификации поверхностей дороги.
Контроллер 220 согласно различным вариантам осуществления настоящего изобретения может управлять устройством 250 обслуживания поверхности дороги, оснащенным на дороге, на основе классифицированной поверхности дороги таким образом, чтобы содержать поверхность дороги.
Устройство 250 обслуживания поверхности дороги согласно различным вариантам осуществления настоящего изобретения может включать в себя снегоуборочное устройство, такое как устройство с нагревательной проволокой или устройство-распылитель соляного раствора, установленное на дороге или в дренажном сооружении. Ниже описаны подробности работы устройства обслуживания поверхности дороги согласно различным вариантам осуществления настоящего изобретения.
Ниже в этом документе подробно описан способ классификации поверхности дороги посредством устройства классификации поверхностей дороги согласно настоящему изобретению.
В общем, поскольку различные материалы имеют различные акустические импедансы, отраженные сигналы для одних и тех же поступающих звуковых сигналов различаются для каждого материала. Следовательно, посредством использования этих физических свойств, материал может отличаться посредством анализа отраженного сигнала. В частности, поскольку акустический импеданс представляет собой физическую величину, имеющую частотные характеристики, если отраженный сигнал анализируется в частотной области, материал отраженной поверхности может более точно классифицироваться.
Искусственная нейронная сеть может использоваться для того, чтобы осуществлять способ классификации поверхностей дороги с использованием сигналов отражения звука согласно различным вариантам осуществления настоящего изобретения.
Нейронная сетевая модель искусственной нейронной сети согласно различным вариантам осуществления настоящего изобретения может включать в себя множество иерархий или слоев.
Нейронная сетевая модель может реализовываться в форме классификатора, который формирует информацию классификации поверхностей дороги. Классификатор может выполнять несколько классификаций. Например, нейронная сетевая модель может представлять собой множественную классификационную модель, которая классифицирует результаты для входных данных на несколько классов.
Нейронная сетевая модель согласно варианту осуществления настоящего изобретения может включать в себя глубокую нейронную сеть (DNN) алгоритма на основе многослойного перцептрона, включающую в себя входной слой, множество скрытых слоев и выходной слой.
Нейронная сетевая модель согласно другому варианту осуществления настоящего изобретения может включать в себя сверточную нейронную сеть (CNN). В качестве структуры CNN может использоваться по меньшей мере одна из AlexNet, LENET, NIN, VGGNet, ResNet, WideResnet, GoogleNet, FractaNet, DenseNet, FitNet, RitResNet, HighwayNet, MobileNet, DeeplySupervisedNet. Нейронная сетевая модель может реализовываться с использованием множества структур CNN.
Например, нейронная сетевая модель может быть реализована таким образом, что она включает в себя множество блоков VGGNet. В качестве более конкретного примера, нейронная сетевая модель может быть создана посредством комбинирования первой структуры, в которой последовательно комбинируются слой CNN, имеющий 64 фильтра размера 3×3, слой пакетной нормализации (BN) и слой ReLu, и второго блока, в котором последовательно комбинируются слой CNN, имеющий 128 фильтров размера 3×3, слой ReLu и слой BN.
Нейронная сетевая модель может включать в себя слой объединения в пул по максимуму после каждого блока CNN и может включать в себя слой объединения в пул по глобальному среднему (GAP), полностью соединенный (FC) слой и активационный слой (например, сигмоиду, функцию мягкого максимума и т.п.) на конце.
Искусственная нейронная сеть согласно различным вариантам осуществления настоящего изобретения означает нейронную сетевую модель для извлечения характеристик из преобразованного по частоте сигнала звукового сигнала, с тем чтобы классифицировать поверхность дороги, и не ограничена вышеприведенным примером.
Искусственная нейронная сеть классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения может обучаться посредством использования данных частотной области отраженного сигнала в качестве входного значения, и обученная искусственная нейронная сеть может классифицировать поверхность дороги, от которой целевой сигнал отражается, посредством использования данных частотной области целевого сигнала в качестве входного значения.
Данные частотной области могут означать для данных, полученных посредством выполнения преобразования в частотной области для цифрового сигнала, преобразованного через ADC-дискретизацию отраженного сигнала.
В качестве способа преобразования в частотной области согласно различным вариантам осуществления настоящего изобретения, может использоваться кратковременное преобразование Фурье (STFT), быстрое преобразование Фурье (FFT), кепстральное (кепстральное) преобразование, вейвлет-преобразование, способ взаимной корреляции, сверточное преобразование и т.п. Вышеописанный способ преобразования в частотной области является примерным и не ограничен перечисленными способами преобразования, и могут использоваться различные способы преобразования или анализа для анализа звукового сигнала во временной области в частотной области.
В качестве примера данных частотной области согласно различным вариантам осуществления настоящего изобретения, могут быть включены данные спектрограммы, полученные через преобразование STFT.
В качестве другого примера данных частотной области согласно различным вариантам осуществления настоящего изобретения, данные, полученные посредством применения способа взаимной корреляции, могут включаться. В этом случае, взаимный корреляционный синтез для входных данных может соответствовать этапу ввода данных в слой свертки, так что обучение и классификация на основе CNN могут быть возможными с использованием этапа.
Между тем, данные частотной области, используемые для обучения, могут помечаться информацией, необходимой для классификации поверхностей дороги. В этом случае, помеченная информация может включать в себя информацию типа поверхности дороги и/или состояния атмосферы.
Согласно варианту осуществления настоящего изобретения для обучения искусственной нейронной сети классификации поверхностей дороги набор обучающих данных может включать в себя набор данных, в котором тип поверхности дороги, из которого получаются каждые данные, помечается в данных частотной области.
Тип поверхности дороги, классифицированный посредством устройства классификации поверхностей дороги согласно варианту осуществления настоящего изобретения, может включать в себя асфальт, цемент, почву, лед, мрамор, краску, слякоть (которая смешивается с водой), снег, воду и т.д. Перечисленные классы являются примерными, и в различных вариантах осуществления настоящего изобретения, число или группа классов, которые должны классифицироваться согласно ситуации, может варьироваться. Между тем, вместо использования этого способа прямой пометки или названия группы, каждый входные данные могут группироваться как первый класс и второй класс случайным способом. Эта случайная группировка может представлять собой результат классификации с использованием неконтролируемой нейронной сети, в которой обучающие данные не включают в себя метки, но ограничения на это нет.
Фиг. 3 является блок-схемой, иллюстрирующей способ, осуществляемый посредством устройства классификации поверхностей дороги согласно настоящему изобретению. Согласно различным вариантам осуществления, операции, проиллюстрированные на фиг. 3, не ограничены проиллюстрированным порядком и могут выполняться в различных порядках. Помимо этого, согласно различным вариантам осуществления, может выполняться большее число операций, чем операции, проиллюстрированные на фиг. 3, либо может выполняться по меньшей мере на одну операцию меньше, чем операции, проиллюстрированные на фиг. 3. Фиг. 4-12 могут упоминаться как чертежи для пояснения операций, проиллюстрированных на фиг. 3.
Обращаясь к фиг. 3, на этапе 301, устройство классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения может передавать или запускать звуковой сигнал к целевой поверхности дороги для классификации с использованием передающего устройства. На этапе 301, звуковой сигнал может передаваться по меньшей мере однократно, и число времен передачи или периодов передачи сигнала может изменяться согласно пользовательскому вводу, предварительно установленному условию или управлению сервера. Когда звуковой сигнал передается многократно в одном периоде определения, поскольку множество данных для классификации или определения состояния поверхности дороги могут получаться, точность классификации поверхностей дороги может повышаться. Ниже описан подробный вариант осуществления периода передачи звукового сигнала и операции передачи многократно в одном периоде с обращением к фиг. 4.
На этапе 302, устройство классификации поверхностей дороги может принимать сигнал, отражаемый от целевой поверхности дороги, с использованием приемного устройства. Поскольку отраженный сигнал представляет собой отраженный сигнал для передаваемого звукового сигнала, звуковой сигнал и отраженный сигнал могут соответствовать друг другу. Когда множество звуковых сигналов передается, отраженный сигнал может приниматься многократно.
В случае передачи звукового сигнала, устройство классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения может получать информацию состояния атмосферы через датчик состояния атмосферы блока 120 считывания. В этом случае, время, когда информация состояния атмосферы получается, не должно обязательно совпадать со временем, когда звуковой сигнал передается, и это означает то, что между ними имеется соответствие в течение заданного временного интервала. Иными словами, устройство классификации поверхностей дороги может получать информацию состояния атмосферы, соответствующую одному звуковому сигналу, или получать одну информацию состояния атмосферы, соответствующую множеству звуковых сигналов. Устройство классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения может обрабатывать отраженный сигнал, соответствующий звуковому сигналу, на основе информации состояния атмосферы, соответствующей запущенному звуковому сигналу.
Между тем, время от момента, когда один звуковой сигнал передается из передающего устройства, до момента, когда, отраженный сигнал принимается посредством приемного устройства, может задаваться как время пролета (ToF). Поскольку скорость распространения звука в атмосфере может определяться при конкретных погодных условиях, расстояние между устройством классификации поверхностей дороги и целевой поверхностью дороги может измеряться на основе ToF и информации состояния атмосферы. С другой стороны, когда расстояние между устройством классификации поверхностей дороги и целевой поверхностью дороги известно заранее, ToF может оцениваться. Следовательно, устройство классификации поверхностей дороги согласно различным вариантам осуществления может идентифицировать принимаемый сигнал, соответствующий звуковому сигналу, передаваемому из передающего устройства. Иными словами, посредством определения интервала приема принимаемого сигнала, соответствующего звуковому сигналу, передаваемому из передающего устройства, сигнал, принимаемый в этом интервале, может определяться в качестве отраженного сигнала для передаваемого звукового сигнала, и сигнал, принимаемый в других интервалах, может рассматриваться как шум или как отраженный сигнал для другого звукового сигнала. Ниже описан подробный вариант осуществления способа управления устройства классификации поверхностей дороги, который управляет шумовым сигналом с использованием означенного, с обращением к фиг. 5.
На этапе 303 устройство 100 классификации поверхностей дороги может предварительно обрабатывать принимаемый отраженный сигнал через контроллер для получения данных для ввода в искусственную нейронную сеть классификации поверхностей дороги согласно настоящему изобретению. В настоящем изобретении предварительная обработка сигнала означает интегральный процесс получения данных для ввода в искусственную нейронную сеть на основе принимаемого отраженного сигнала, и операция предварительной обработки на этапе 303 может включать в себя операцию дискретизации аналогового сигнала в цифровой сигнал, операцию коррекции величины ослабления или коррекции ToF для дискретизированного сигнала, операцию преобразования в частотной области и т.д. Ниже подробно описан процесс предварительной обработки для получения входных данных для искусственной нейронной сети классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения с обращением к фиг. 6-8.
На этапе 304, входные данные, полученные через процесс предварительной обработки, могут вводиться в искусственную нейронную сеть классификации поверхностей дороги. Между тем, искусственная нейронная сеть классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения может обучаться в качестве набора обучающих данных, включающего в себя множество данных, полученных для различных поверхностей дороги для того, чтобы классифицировать поверхность дороги. Обученная искусственная нейронная сеть классификации поверхностей дороги может выводить результаты на основе входных данных.
Результат вывода согласно варианту осуществления настоящего изобретения может включать в себя информацию, связанную со значением вероятности для каждого из классов по классификации поверхности дороги. Когда искусственная нейронная сетевая модель обучается для того, чтобы разделять поверхность дороги на множество типов, вероятность того, что целевая поверхность дороги соответствует каждому из множества типов поверхностей дороги, может выражаться посредством числовых значений и выводиться. В этом случае, один или более классов могут выводиться в порядке вероятности выходных классов поверхности дороги.
Результат вывода согласно другому варианту осуществления настоящего изобретения может выводиться посредством определения конкретного класса из множества классов. В этом случае, значение вероятности для соответствующего класса может быть равным или большим порогового значения, или разность между значением вероятности и вторым классом может быть равной или большей порогового значения.
Между тем, результат вывода искусственной нейронной сети классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения представляет собой информацию, связанную с материалом или состоянием поверхности дороги, и может выводиться в необходимой форме пользователю согласно проектному решению по искусственной нейронной сети, без ограничения вышеприведенным примером.
На этапе 305, устройство классификации поверхностей дороги может выполнять различные операции согласно результатам вывода. Посредством изменения или добавления операции управления на основе результата классификации поверхностей дороги, точность результата или эффективность обслуживания поверхности дороги может повышаться.
Согласно различным вариантам осуществления настоящего изобретения, когда результат вывода отличается от непосредственно предшествующего результата вывода, процесс сравнения результата вывода с непосредственно предшествующим результатом вывода может выполняться до управления поверхностью дороги посредством результата вывода, чтобы отличать, обусловлено ли изменение условий на поверхности дороги изменением погодных условий или ошибкой вывода. Ниже подробно описаны конкретные варианты осуществления этого с обращением к фиг. 10 и 11. В этом случае, устройство классификации поверхностей дороги может изменять частоту или число передач звукового сигнала на основе результата вывода.
Согласно различным вариантам осуществления настоящего изобретения, когда результат вывода связан с конкретным классом (например, снегом, льдом или слякотью), команда или сигнал для управления поверхностью дороги может формироваться и передаваться через устройство обслуживания поверхности дороги. Ниже подробно описан вариант осуществления обслуживания поверхности дороги согласно результату вывода ссылкой на фиг. 12.
Фиг. 4 является схемой, иллюстрирующей звуковой сигнал, передаваемый посредством устройства классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения на временной оси.
Обращаясь к фиг. 4, звуковой сигнал может передаваться многократно в одном периоде передачи. В настоящем изобретении набор звуковых сигналов, передаваемых в одном периоде передачи для определения состояния поверхности дороги, называется «пакетом».
Число звуковых сигналов, включенных в один пакет, может изменяться согласно пользовательской настройке или заданному правилу. Помимо этого, интервал между звуковыми сигналами, включенными в один пакет, может изменяться согласно пользовательской настройке или заданному правилу. Интервал между звуковыми сигналами, включенными в пакет, может быть постоянным или не постоянным. Помимо этого, интенсивность звуковых сигналов, включенных в один пакет, может быть равной или различной.
В настоящем описании число, интервал, интенсивность и длительность звуковых сигналов, включенных в один пакет, называются «конфигурацией пакета». В настоящем описании различные пакеты могут иметь одинаковую или различную конфигурацию пакета. Конфигурация пакета для каждого пакета может изменяться согласно пользовательской настройке или заданному правилу.
Число звуковых сигналов, включенных в пакет согласно варианту осуществления настоящего изобретения, может составлять один.
Число звуковых сигналов, включенных в пакет согласно другому варианту осуществления настоящего изобретения, может составлять множество.
В настоящем описании период передачи означает интервал передачи пакета для устройства классификации поверхностей дороги для того, чтобы классифицировать состояние или материал целевой поверхности дороги. Когда пакет состоит из одного сигнала, т.е. если только один сигнал передается, период передачи может означать временной интервал между регулярно передаваемыми смежными звуковыми сигналами. Обращаясь к фиг. 4, период передачи может соответствовать временному интервалу между первым сигналом 1a, включенным в пакет 1, и первым сигналом 2a, включенным в следующий пакет 2. Период передачи может изменяться согласно пользовательской настройке или заданному правилу.
Согласно различным вариантам осуществления настоящего изобретения, число и/или период передачи звуковых сигналов, включенных в пакет, могут изменяться согласно результату классификации поверхностей дороги или погодных условий. Например, при определенных погодных условиях, к примеру, когда идет снег, или температура ниже точки замерзания, число передаваемых звуковых сигналов может увеличиваться, или период передачи может немного изменяться, чтобы повысить точность классификации поверхностей дороги. Ниже подробно описан конкретный вариант осуществления этого с обращением к фиг. 10 и 11.
Между тем, согласно различным вариантам осуществления настоящего изобретения, период передачи может варьироваться согласно положению установки устройства классификации поверхностей дороги или объектов. Это служит для того, чтобы отличать между отраженным принимаемым сигналом от поверхности дороги и сигналом перекрестных помех, вызываемым посредством передаваемого сигнала из передающего устройства. Период передачи устройств классификации дорог, установленных в дорожной инфраструктуре, может превышать период передачи устройств классификации дорог, установленных в транспортных средствах. Следовательно, период определения устройства классификации поверхностей дороги, установленного в дорожной инфраструктуре, может быть больше периода определения устройства классификации поверхностей дороги, установленного в транспортном средстве.
Согласно различным вариантам осуществления настоящего изобретения, устройство классификации поверхностей дороги может измерять или определять ToF для целевой поверхности дороги или объекта. Например, устройство классификации поверхностей дороги может передавать один или более звуковых сигналов и определять ToF для целевой поверхности дороги или объекта на основе принимаемого сигнала. В качестве альтернативы, ToF может определяться на основе расстояния между устройством классификации поверхностей дороги и целевой поверхностью дороги.
Устройство классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения может определять соответствующий период передачи и конфигурацию пакета на основе определенного ToF и передавать с определенным периодом передачи и конфигурацией пакета. Период передачи согласно варианту осуществления настоящего изобретения может задаваться большим ToF для поверхности дороги. Длительность пакета согласно варианту осуществления настоящего изобретения может задаваться меньшей периода передачи.
В результате классификации поверхностей дороги для целевой поверхности дороги посредством устройства классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения, может выводиться один результат, соответствующий одному пакету. В качестве альтернативы, устройство классификации поверхностей дороги может отображать результат классификации для всех звуковых сигналов, включенных в один пакет. Когда один результат выводится, результат может выводиться на основе множества результатов классификации для каждого из множества звуковых сигналов, включенных в пакет.
Обращаясь к фиг. 4, первый результат (результат 1) представляет собой результат классификации поверхностей дороги, полученный посредством первого пакета (пакета 1) на основе отраженного сигнала для поверхности дороги. В этом случае, первый результат может представлять собой результат, полученный на основе результата классификации поверхностей дороги каждого из сигналов 1a, 1b, 1c и 1d, включенных в первый пакет. Например, самое частое значение результатов 1a, 1b, 1c и 1d может выводиться в качестве результата. В качестве альтернативы, результат классификации поверхностей дороги для первого пакета может выводиться на основе среднего значения, полученного посредством суммирования результатов 1a, 1b, 1c и 1d.
В настоящем описании временной интервал между результатами классификации поверхностей дороги смежных пакетов, т.е. временной интервал между первым результатом и вторым результатом, может называться «периодом определения» для классификации поверхностей дороги. Период определения может совпадать с периодом передачи. Тем не менее, в случае процесса определения, поскольку время вывода может быть нерегулярным согласно операции обработки сигнала, период определения может не быть постоянным или может не совпадать с периодом передачи.
Устройство классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения может изменять период передачи для изменения периода определения. В качестве альтернативы, период определения может изменяться согласно пользовательской настройке или заданному правилу. Ниже подробно описан подробный вариант осуществления изменения периода определения с обращением к фиг. 10 и 11.
Фиг. 5 является схемой, иллюстрирующей период передачи звукового сигнала и период приема отраженного сигнала согласно варианту осуществления настоящего изобретения.
Обращаясь к фиг. 5, устройство классификации поверхностей дороги может передавать пакет или звуковой сигнал в периоде передачи. Хотя случай, в котором один сигнал передается для удобства пояснения, настоящее изобретение не ограничено тем, что проиллюстрировано. Другими словами, можно понимать, что передача звукового сигнала посредством устройства классификации поверхностей дороги в данном изобретении включает в себя передачу пакета, состоящего из множества сигналов с периодом, а также испускание одного сигнала в одном случае.
Как описано выше, устройство классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения может определять ToF для поверхности дороги передаваемого звукового сигнала и в силу этого может предварительно определять соответствующий интервал приема для одного интервала передачи.
Согласно различным вариантам осуществления настоящего изобретения, когда сигнал считывается посредством приемного устройства до интервала приема, устройство классификации поверхностей дороги может рассматривать его как шумовой сигнал или сигнал перекрестных помех и может управлять передающим устройством устройства классификации поверхностей дороги с возможностью его уменьшения.
В частности, обращаясь к фиг. 5, когда интенсивность первого сигнала, принимаемого до интервала приема, больше первого порогового значения, либо когда разность между интенсивностью второго сигнала, принимаемого в интервале приема, и интенсивностью первого сигнала, принимаемого до интервала приема, меньше второго порогового значения, мощность, подаваемая в передающее устройство, может изменяться с возможностью управления этим. Первое пороговое значение и/или второе пороговое значение могут быть заданы или заданы посредством пользовательского ввода или внешнего устройства.
Например, когда интенсивность первого сигнала больше первого порогового значения, может определяться то, что влияние перекрестных помех является большим и может управляться таким образом, чтобы уменьшать вибрацию передающего устройства. В качестве альтернативы, когда интенсивность второго сигнала меньше интенсивности первого сигнала, может определяться то, что шум, вызываемый посредством внешнего окружения, больше принимаемого сигнала и может управляться таким образом, чтобы увеличивать вибрацию передающего устройства. Согласно варианту осуществления настоящего изобретения, вибрация передающего устройства может управляться посредством регулирования абсолютной величины мощности, подаваемой в передающее устройство.
Фиг. 6 является схемой, иллюстрирующей объект, в котором устанавливается устройство классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения.
Обращаясь к фиг. 6, устройство 100 классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения может устанавливаться в движущемся объекте 610 или в дорожной инфраструктуре 620. В этом случае, устройство 100a классификации поверхностей дороги, установленное на движущемся объекте 610, таком как транспортное средство, и устройство 100b классификации поверхностей дороги, установленное на дорожной инфраструктуре 620, имеют различные высоты для поверхности дороги, так что ToF передаваемого звукового сигнала отличается.
Поскольку звуки распространяются через пространство, амплитуда снижается по мере того, как расстояние от источника звука увеличивается, и если они продвигаются в воздухе, возникает ослабление посредством среды. Следовательно, характеристики отраженных сигналов для поверхностей дороги, имеющих различные ToF, могут отличаться, даже если они находятся в одинаковом состоянии.
Между тем, устройство классификации поверхностей дороги настоящего изобретения использует искусственную нейронную сеть для того, чтобы классифицировать поверхность дороги на основе отраженного сигнала для поверхности дороги, так что множество наборов данных требуется для того, чтобы обучать искусственную нейронную сеть.
Фиг. 7 является схемой, иллюстрирующей способ получения набора данных для обучения искусственной нейронной сети классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения.
Обращаясь к фиг. 7, набор обучающих данных для обучения искусственных нейронных сетей для классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения может получаться для различных поверхностей дороги для каждого (класса) по классификации поверхностей дороги с использованием приемо-передающего устройства, включенного в мобильное измерительное оборудование 700. В общем, важно собирать большое число данных в различных рельефах местности и окружениях, чтобы повышать производительность классификации искусственной нейронной сети, и для этого важно собирать данные с использованием оборудования, которое просто перемещать.
Мобильное измерительное оборудование 700 настоящего изобретения означает сенсорное устройство, смонтированное на оборудовании, которое движется по дороге, такое как велосипеды, автомобили или скутеры, и может включать в себя оборудование, которое может перемещаться людьми или посредством механических устройств.
Между тем, ToF обучающих данных, собранных посредством мобильного измерительного оборудования 700, может быть аналогичным ToF устройства 100a классификации поверхностей дороги, установленного в движущемся объекте 610, таком как транспортное средство по фиг. 6. В качестве альтернативы, местоположение мобильного измерительного оборудования относительно земли может устанавливаться с учетом местоположения устройства классификации поверхностей дороги, установленного в движущемся объекте, относительно земли. В этом случае, искусственная нейронная сеть классификации поверхностей дороги, обученная с набором обучающих данных, полученным посредством мобильного измерительного оборудования согласно различным вариантам осуществления настоящего изобретения, может использоваться непосредственно в устройстве 100a классификации поверхностей дороги, установленном в движущемся объекте, вообще без дополнительной коррекции для отраженного сигнала.
Тем не менее, как показано на фиг. 6, когда устройство классификации поверхностей дороги устанавливается на отличающейся высоте относительно движущегося объекта, такого как дорожная инфраструктура (100b), и отраженный сигнал, полученный посредством устройства классификации поверхностей дороги, непосредственно вводится в искусственную нейронную сеть классификации поверхностей дороги, точность классификации целевой поверхности дороги может понижаться.
Фиг. 8 является блок-схемой, иллюстрирующей процесс, в котором устройство классификации поверхностей дороги согласно различным вариантам осуществления предварительно обрабатывает принимаемый отраженный сигнал. Процесс предварительной обработки по фиг. 8 представляет собой пример для выражения технической идеи настоящего изобретения, и согласно различным вариантам осуществления, может выполняться большее число операций, либо может выполняться меньше по меньшей мере на одну операцию, чем операции, проиллюстрированные на фиг. 8.
На этапе 801, устройство классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения может получать первые данные на основе принимаемого отраженного сигнала.
Как описано выше, отраженный сигнал, принимаемый через приемное устройство, может представлять собой аналоговый сигнал, и в силу этого устройство классификации поверхностей дороги настоящего изобретения может преобразовывать отраженный сигнал в цифровой сигнал через схему ADC, включенную в контроллер 130. В качестве альтернативы, приемо-передающее устройство, включенное в устройство классификации поверхностей дороги согласно одному варианту осуществления настоящего изобретения, может обрабатывать отраженный сигнал, отражаемый через поверхность дороги, в форме цифрового сигнала, чтобы получать первые данные.
На этапе 802, устройство классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения может получать вторые данные посредством применения атмосферной коррекции к данным, преобразованным в цифровой сигнал.
Звук распространяется в воздухе и ослабляется вследствие влияния среды, и величина ослабления определяется посредством расстояния распространения и коэффициента ослабления. Между тем, поскольку коэффициент ослабления является числом, определенным на основе температуры, влажности, давления воздуха и частоты звукового сигнала, устройство классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения может вычислять величину ослабления звукового сигнала на его основе.
Устройство классификации поверхностей дороги согласно различным вариантам осуществления может формировать вторые данные посредством коррекции ослабления принимаемого отраженного сигнала на основе информации состояния атмосферы, такой как температура, влажность, давления воздуха и т.д., полученной через датчик состояния атмосферы.
Между тем, расстояние распространения звука, требуемого для атмосферной коррекции, может вводиться заранее пользователем или может получаться на основе ToF. Иными словами, в зависимости от положения, в котором установлено устройство классификации поверхностей дороги, информация расстояния относительно поверхности дороги может вводиться заранее, или, как описано выше, информация расстояния относительно поверхности дороги может получаться на основе информации ToF и информации состояния атмосферы, полученной посредством устройства классификации поверхностей дороги.
На этапе 803, устройство классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения может получать третьи данные посредством применения коррекции расстояния ко вторым данным, которые корректируют величину ослабления в атмосфере.
Как описано выше, обращаясь к фиг. 6 и 7, звуковой сигнал, который является основой обучающих данных искусственной нейронной сети классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения, может представлять собой сигнал, полученный посредством отражения на расстоянии d1 от поверхности дороги. Следовательно, чтобы увеличивать производительность классификации устройства 100b классификации поверхностей дороги, установленного на высоте d2, отличающейся от d1, звуковой сигнал, полученный на d2, может корректироваться, как если он представляет собой звуковой сигнал, полученный на d1.
Между тем, этапы 802 и 803 могут выполняться в одной процедуре. Для цифрового сигнала, получаемого на этапе 801, могут получаться звуковые данные, в которых величина ослабления в атмосфере и расстояние до поверхности дороги корректируются на основе информации состояния атмосферы и информации расстояния.
Помимо этого, процедура коррекции этапа 802 и/или 803 может быть исключена в зависимости от положения установки устройства классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения.
На этапе 804, устройство классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения может получать данные частотной области посредством выполнения преобразования, чтобы анализировать скорректированные звуковые данные в частотной области. Способ преобразования в частотной области согласно различным вариантам осуществления настоящего изобретения является таким, как описано выше. Полученные данные частотной области представляют собой входные данные для искусственной нейронной сети классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения, и когда данные частотной области вводятся в искусственную нейронную сеть классификации поверхностей дороги, искусственная нейронная сеть классификации поверхностей дороги может выводить результат классификации поверхностей дороги для целевой поверхности дороги.
Устройство классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения может выводить результат на основе дополнительной информации, отличной от звукового сигнала. Другая информация, которая может дополнительно получаться, отличная от звукового сигнала, может включать в себя информацию изображений, получаемую через видеодатчик (камеру), информацию температуры поверхности дороги, полученную через IR-датчик, и информацию окружения, полученную через блок связи.
Согласно варианту осуществления настоящего изобретения, устройство классификации поверхностей дороги может комбинировать два или более различных критерия определения.
Поскольку зона, которая может идентифицироваться через звук, может соответствовать части зоны поверхности дороги, информация изображений, которая может идентифицироваться в более широкой зоне, может использоваться в качестве помощи в результате классификации поверхностей дороги. Например, она может определяться в качестве эффективной информации поверхности дороги только тогда, когда результаты, идентифицированные через информацию изображений, и выходное значение искусственной нейронной сети классификации поверхностей дороги совпадают. Между тем, устройство классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения дополнительно может включать в себя отдельную искусственную нейронную сеть классификации поверхностей дороги на основе изображений для получения результата классификации поверхностей дороги для получения информации изображений.
Помимо этого, согласно различным вариантам осуществления, устройство классификации поверхностей дороги может верифицировать результирующее значение для конкретного состояния поверхности дороги посредством применения конкретных температурных условий. Например, когда температура поверхности дороги выше 0 градусов Цельсия, лед не может физически формироваться при атмосферном давлении, и в силу этого, когда результат классификации поверхностей дороги классифицируется как лед при соответствующих температурных условиях, он может определяться как соответствующий ошибке. Следовательно, когда температура поверхности дороги или атмосферы, полученная через IR-датчик или датчик состояния атмосферы блока считывания, подтверждается как составляющая выше конкретной температуры, если состояние поверхности дороги, указываемое посредством результата классификации поверхностей дороги, связано со льдом, дополнительная операция может выполняться вместо вывода соответствующего результата. В качестве альтернативы, когда температура поверхности дороги выше или ниже конкретной температуры, результат дополнительно может использоваться для получения информации изображений, чтобы выводить результат.
Помимо этого, согласно различным вариантам осуществления настоящего изобретения, устройство классификации поверхностей дороги может выводить результат классификации поверхностей дороги также с учетом информации окружающих погодных условий. Например, при приеме информации окружающих погодных условий, связанной с погодой, к примеру, когда идет снег или дождь, ранжирование результата классификации поверхностей дороги для класса, который должен классифицироваться высоко при соответствующей погоде, может регулироваться.
Между тем, поскольку вышеописанная информация изображений и информация температуры представляют собой полезную информацию для классификации состояния поверхности дороги, искусственная нейронная сеть классификации поверхностей дороги может повышать производительность обучения и производительность классификации посредством приема связанных дополнительных данных вместе вместо обучения только с данными на основе звукового сигнала.
Фиг. 9 является схемой, иллюстрирующей многомодальную искусственную нейронную сеть согласно варианту осуществления настоящего изобретения.
Обращаясь к фиг. 9, искусственная нейронная сеть классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения может включать в себя многомодальную искусственную нейронную сеть. Многомодальная искусственная нейронная сеть может функционировать в качестве одного классификатора через классификатор на основе различной информации посредством ввода по меньшей мере одной из информации изображений, информации состояния атмосферы или информации температуры поверхности дороги вместе, в дополнение к входным данным, связанным со звуковым сигналом. Более точный результат классификации поверхностей дороги может получаться посредством ввода множества информации, связанной с одним состоянием поверхности дороги, вместе через такое соответствующее обучение. Иными словами, устройство классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения может выводить результат поверхности дороги посредством комбинирования множества информации. Между тем, входные данные, проиллюстрированные на фиг. 9, являются примерными, и только часть информации изображений, информации состояния атмосферы и/или информации температуры поверхности дороги может использоваться, либо дополнительная информация дополнительно может использоваться.
Фиг. 10 является блок-схемой, иллюстрирующей операцию, в которой устройство классификации поверхностей дороги согласно варианту осуществления настоящего изобретения изменяет операцию управления на основе заданного триггера изменения управления.
В данном описании триггер изменения управления означает ситуацию или условие для изменения работы устройства классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения и может предварительно устанавливаться пользователем или задаваться посредством команды из внешнего устройства.
Между тем, операция управления устройства классификации поверхностей дороги изменяется посредством триггера изменения управления, что означает то, что схема, заданная до триггера изменения управления, возникает в устройстве классификации поверхностей дороги, такая как конфигурация пакета, период передачи, период определения, схема вывода результатов классификации поверхностей дороги и т.д.
Триггер изменения управления может включать в себя, но не только, изменение результата (класса по) классификации поверхностей дороги или вывода конкретного класса, погодных условий, временных условий, географических условий и т.д.
В качестве примера триггера изменения управления, когда результат классификации поверхностей дороги изменяется, работа устройства классификации поверхностей дороги может изменяться.
Фиг. 11 является схемой, иллюстрирующей сценарий, в котором результат классификации поверхностей дороги изменяется согласно варианту осуществления настоящего изобретения.
Обращаясь к фиг. 11, результат классификации поверхностей дороги из устройства классификации поверхностей дороги согласно варианту осуществления настоящего изобретения может изменяться на первый класс (R1) в первое время (t1) и второй класс (R2) во второе время (t2). Второй класс может представлять собой класс, отличающийся от первого класса.
Согласно варианту осуществления настоящего изобретения, второй класс может указывать состояние поверхности дороги, связанное со льдом, и первый класс может представлять собой результат классификации, связанный с другими состояниями поверхности дороги.
Когда состояние поверхности дороги изменяется, устройство классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения, возможно, должно изменять операцию управления.
Например, когда результат классификации поверхностей дороги отличается от предыдущего результата классификации, устройство классификации поверхностей дороги может изменять период передачи или изменять конфигурацию пакета, чтобы проверять, возникает ли ошибка в результате классификации поверхностей дороги. Иными словами, число времен определения может увеличиваться за счет меньшего периода передачи, или число звуковых сигналов, включенных в пакет, может увеличиваться, чтобы увеличивать число времен определения. В качестве альтернативы, вместо изменения периода передачи или конфигурации пакета непосредственно, может определяться то, изменяется либо нет период передачи или конфигурация пакета, на основе последующего определения.
Обращаясь к фиг. 11, поскольку результат второго времени отличается от результата первого времени (R1≠R2), устройство классификации поверхностей дороги согласно варианту осуществления настоящего изобретения может управлять периодом передачи таким образом, что он изменяется кратко, и больше результатов могут получаться в течение короткого временного интервала (t3-t6). Между тем, в течение соответствующего временного интервала (t3-t6), число времен определения как второго класса больше числа времен определения как первого класса, и в силу этого устройство классификации поверхностей дороги может определять то, что определение как второго класса является точным, изменяться период передачи на исходное состояние и выводить результат в седьмое время (t7), которое представляет собой время на основе измененного периода передачи.
Согласно различным вариантам осуществления настоящего изобретения, в качестве примера изменения операции управления на основе последующего определения, когда предшествующее определение изменяется, когда первый класс (R1) определяется в первое время (t1), и второй класс (R2) определяется во второе время (t2), отличающийся от первого класса, вместо изменения периода передачи немедленно, может определяться, изменяется ли точность определения второго класса или период передачи, на основе результата третьего класса в третье время (t3), которое представляет собой следующее время определения. Иными словами, когда результат третьего класса определяется как составляющий r2, измененный класс может определяться как точный во второе время, и период передачи может не изменяться, и когда результат третьего класса не определяется как составляющий r2, определение r2 может определяться как ошибка, и период передачи может изменяться.
Между тем, результат определения в каждое время может представлять собой результат, соответствующий каждому пакету, согласно различным вариантам осуществления настоящего изобретения.
Устройство классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения дополнительно может выполнять операцию, связанную с обслуживанием поверхности дороги, на основе результатов множества определений в измененной операции управления. Например, после определения точности измененного конкретного класса, релевантный класс может считаться корректным, и операция обслуживания поверхности дороги, связанная с измененным классом, может выполняться. Ниже описаны подробности, связанные с операцией обслуживания поверхности дороги, с обращением к фиг. 12.
В качестве другого примера триггера изменения управления, когда погодные условия или временные условия изменяются, работа устройства классификации поверхностей дороги может изменяться.
В качестве примера погодных условий, когда температура составляет меньше нуля по Цельсию, либо когда температура ниже нуля по Цельсию предсказывается, устройство классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения может изменять операцию управления за счет сокращения периода передачи или увеличения числа передач в пакете, чтобы быстро определить, возникает ли гололед. В качестве другого примера погодных условий, могут быть предусмотрены такие окружающие погодные условия, как сильный ветер, дождь, сильный снегопад и т.д., и информация, связанная с окружающими погодными условиями, может получаться через датчик состояния атмосферы, включенный в устройство классификации поверхностей дороги, либо может получаться из внешнего устройства через блок связи.
В качестве примера временных условий, поскольку гололед может проще возникать ночью, чем днем, период передачи или конфигурация пакета может изменяться в конкретное время с учетом этого аспекта. В качестве другого примера временных условий, поскольку лето может иметь меньшее изменение в состоянии поверхности дороги, чем зима, операция управления может изменяться за счет продления периода передачи или уменьшения числа передач в пакете, чтобы уменьшать потребление мощности.
В качестве другого примера триггера изменения управления, когда географические условия изменяются, работа устройства классификации поверхностей дороги может изменяться. Когда устройство классификации поверхностей дороги устанавливается в дорожной инфраструктуре, географические условия могут не изменяться, но период передачи или конфигурация пакета может отличаться для условий в каждой области. Когда устройство классификации поверхностей дороги устанавливается в движущемся объекте, таком как транспортное средство, период передачи или конфигурация пакета может отличаться при въезде в конкретную область. Например, при въезде в уязвимую для гололеда секцию, операция управления может изменяться так, как описано выше, когда устройство классификации поверхностей дороги принимает релевантную информацию.
Между тем, триггер изменения управления, связанный с вышеуказанными погодными условиями, временными условиями или географическими условиями, является иллюстративным и не ограничен этим и может задаваться посредством пользовательского ввода или сигнала, принимаемого из внешнего электронного устройства, такого как серверное устройство.
Фиг. 12 является схемой, иллюстрирующей способ обслуживания поверхности дороги посредством устройства классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения.
Обращаясь к фиг. 12, на этапе 1201, устройство классификации поверхностей дороги может получать информацию, связанную с управлением поверхностью дороги. Согласно различным вариантам осуществления настоящего изобретения, информация, связанная с управлением поверхностью дороги, может включать в себя результат, полученный на этапе 304 по фиг. 3, или конечный результат, полученный посредством операции управления изменения по фиг. 10. Помимо этого, информация, связанная с управлением поверхностью дороги, может включать в себя погодную информацию и/или информацию температуры поверхности дороги, полученную посредством устройства классификации поверхностей дороги.
На этапе 1202, устройство классификации поверхностей дороги согласно различным вариантам осуществления может определять то, удовлетворяются ли рабочие условия для управления поверхностью дороги, на основе полученной информации.
Например, когда результат классификации поверхностей дороги, полученный на этапе 1201, связан с гололедом, т.е. если класс, связанный со льдом, получается, устройство классификации поверхностей дороги может определять, что условие для работы устройства обслуживания поверхности дороги, установленного на поверхности дороги, выполнено, чтобы исключить или предотвратить обледеневшее состояние поверхности дороги.
В качестве альтернативы, рабочие условия управления поверхностью дороги могут определяться посредством комбинирования полученного результата классификации поверхностей дороги и погодной информации. Например, если погодная информация удовлетворяет определенным условиям, то существует высокая опасность образования льда, и может определяться, что выполнены условия для активации устройства обслуживания поверхности дороги, установленное на шоссе, чтобы очищать или предотвращать ледовые условия на шоссе.
Примеры погодной информации для работы устройства обслуживания поверхности дороги могут включать в себя следующие условия.
(1) Если прогнозируются или начинаются снег, дождь, дождь со снегом или мороз,
(2) Если температура поверхности дороги равна нулю или ниже,
(3) Если время представляет собой рассвет,
(4) Если температура быстро снижается,
(5) Если дует сильный ветер.
Когда по меньшей мере одно из вышеуказанных погодных условий удовлетворяется, если результат классификации поверхностей дороги получается в качестве конкретного класса (например, вода, слякоть, лед), может определяться то, что управление поверхностью дороги необходимо.
Устройство обслуживания поверхности дороги согласно различным вариантам осуществления настоящего изобретения может включать в себя устройство-распылитель соляного раствора или устройство с нагревательной проволокой, но не ограничено этим.
На этапе 1203, устройство классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения может формировать сигнал управления поверхностью дороги на основе полученной информации и определения. Сигнал управления поверхностью дороги может включать в себя сигнал или команду, необходимую для управления устройством обслуживания поверхности дороги, установленным на поверхности дороги.
Устройство классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения может взаимно связываться с устройством обслуживания поверхности дороги, установленным на дороге. Когда устройство классификации поверхностей дороги непосредственно взаимно связывается с устройством обслуживания поверхности дороги, устройство классификации поверхностей дороги может формировать сигнал команды управления для управления устройством обслуживания поверхности дороги и передавать сигнал команды управления в устройство обслуживания поверхности дороги. В качестве альтернативы, когда устройство классификации поверхностей дороги косвенно взаимно связывается с устройством обслуживания поверхности дороги через внешний сервер, устройство классификации поверхностей дороги может формировать сигнал, предписывающий управление устройством обслуживания поверхности дороги, и передавать сигнал на внешний сервер.
Между тем, когда устройство обслуживания поверхности дороги принимает сигнал управления поверхностью дороги, операция управления поверхностью дороги может выполняться на основе сигнала управления поверхностью дороги. Например, устройство обслуживания поверхности дороги может распылять соляной раствор или обеспечивать работу устройства с нагревательной проволокой на основе сигнала управления поверхностью дороги.
В качестве другого варианта осуществления обслуживания поверхности дороги настоящего изобретения, устройство классификации поверхностей дороги может определять опасность повреждения поверхности дороги.
Асфальт может повреждаться вследствие многократных проездов транспортных средств, превышающих удельный вес. В частности, когда вода, просачивающаяся между асфальтом, замерзает, объем может расширяться, и когда большие транспортные средства, такие как грузовики, проезжают, поверхность дороги может повреждаться.
Согласно различным вариантам осуществления устройства классификации поверхностей дороги, установленного на дорожной инфраструктуре, может периодически считывать ToF поверхности дороги и в силу этого может измерять информацию дорожного движения, такую как информация касательно транспортных средств в движении и объем движения.
Фиг. 13 является схемой, иллюстрирующей то, что устройство классификации поверхностей дороги согласно варианту осуществления настоящего изобретения собирает информацию дорожного движения.
Обращаясь к фиг. 13, устройство классификации поверхностей дороги может собирать информацию дорожного движения на поверхности дороги на основе измерения ToF. Информация дорожного движения, собранная посредством устройства классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения, может включать в себя информацию, связанную со степенью повреждения поверхности дороги или объемом движения.
Как описано выше, поскольку устройство классификации поверхностей дороги может получать информацию относительно высоты установки устройства классификации поверхностей дороги, ToF, соответствующее высоте установки устройства классификации поверхностей дороги, может определяться в качестве опорного ToF. Иными словами, ToF отраженного сигнала, отражаемого от поверхности дороги, может называться «опорным ToF».
Следовательно, устройство классификации поверхностей дороги согласно варианту осуществления настоящего изобретения может определять то, что транспортное средство на поверхности дороги отсутствует, когда ToF, полученное посредством устройства классификации поверхностей дороги, идентифицируется как соответствующее опорному ToF. Помимо этого, когда полученное ToF идентифицируется как меньшее опорного ToF, оно может определять то, что имеется транспортное средство на поверхности дороги. Помимо этого, может получаться информация относительно размера (высоты) объекта на поверхности дороги, оцененного на основе полученного ToF.
Поскольку меньшее значение ToF может означать, что имеется высокий объект относительно поверхности дороги, устройство классификации поверхностей дороги может определять то, что большое транспортное средство проезжает, через сигнал, имеющий короткое ToF. Критерий определения большого транспортного средства может быть предварительно установлен посредством пользовательского ввода или сигнала внешнего устройства.
Устройство классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения может оценивать объем движения транспорта, проезжающего по поверхности дороги, за время на основе значения ToF, полученного в течение заданного временного интервала. Помимо этого, информация объема движения, полученная посредством устройства классификации поверхностей дороги настоящего изобретения, дополнительно может включать в себя информацию, связанную с размером проезжающего транспортного средства.
Обращаясь к фиг. 13, ToF по 1(a), когда большое транспортное средство проезжает, измеряется как меньшее, чем ToF по 2(b), когда небольшое транспортное средство проезжает.
Устройство классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения может получать информацию состояния поверхности дороги и/или погодную информацию и в силу этого может комбинировать полученную информацию и информацию объема движения, чтобы определять опасность повреждения поверхности дороги и информировать в отношении нее наружу. Информация состояния поверхности дороги может включать в себя результат классификации поверхностей дороги и/или информацию температуры поверхности дороги.
Например, информация относительно числа проходов большого транспортного средства может измеряться в течение периода, в который результат классификации поверхностей дороги определяется в качестве класса, связанного со льдом, и информация, связанная с ним, может выдаваться пользователю или во внешнее устройство. Внешнее устройство может включать в себя серверное устройство организации, которая содержит дороги. В качестве альтернативы, информация о количестве движущихся транспортных средств может получаться в течение периода, в который температура поверхности дороги измеряется как равная конкретной температуре или ниже, и может передаваться во внешнее устройство. В этом случае, степень повреждения поверхности дороги может оцениваться на основе количества движущихся больших транспортных средств при конкретном результате классификации поверхностей дороги или при конкретных погодных условиях. В качестве альтернативы, посредством передачи полученной информации о количестве движущихся больших транспортных средств во внешнее устройство можно справляться с опасностью повреждения поверхности дороги.
Устройство классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения может определять то, следует использовать классификацию поверхностей дороги либо использовать сбор информации дорожного движения, на основе ToF полученного принимаемого сигнала. Иными словами, когда ToF полученного принимаемого сигнала находится в пределах диапазона ошибок относительно опорного ToF, он может определяться в качестве отраженного сигнала для поверхности дороги и использоваться для классификации поверхностей дороги, и когда ToF полученного принимаемого сигнала меньше опорного ToF, он может определяться как получаемый из транспортного средства, и информация дорожного движения может получаться на его основе.
Чтобы собирать информацию объема движения, устройство классификации поверхностей дороги может сокращать период передачи звукового сигнала по сравнению с периодом передачи для классификации поверхностей дороги. Иными словами, период передачи звукового сигнала может задаваться различными способами в зависимости от потребностей пользователя, и полученный сигнал может обрабатываться различными способами в зависимости от цели.
Между тем, устройство классификации поверхностей дороги настоящего изобретения может включать в себя устройство оценки типов поверхностей дороги. Очевидно, что операция, выполняемая через устройство оценки типов поверхностей дороги согласно различным вариантам осуществления настоящего изобретения, может выполняться посредством устройства классификации поверхностей дороги согласно различным вариантам осуществления настоящего изобретения.
Фиг. 14 является схемой конфигурации устройства оценки типов поверхностей дороги согласно варианту осуществления настоящего изобретения.
Как показано на фиг. 14, устройство оценки типов поверхностей дороги с использованием звуков согласно варианту осуществления настоящего изобретения может включать в себя звуковое приемо-передающее устройство 1410, преобразователь 1420 сигналов, искусственную нейронную сеть 1430 и контроллер 1440 (MCU). Между тем, устройство оценки типов поверхностей дороги дополнительно может включать в себя блок коррекции ослабления в атмосфере (не показан) и блок измерения информации состояния атмосферы (не показан).
Звуковое приемо-передающее устройство 1410 может передавать звуковой сигнал на соответствующую поверхность дороги для того, чтобы узнавать тип, и затем принимать отраженный сигнал.
Звуковое приемо-передающее устройство 1410 может включать в себя звуковое передающее устройство 1411, которое выводит передаваемый сигнал под управлением контроллера 1440, и звуковое приемное устройство 1412, которое принимает отраженный сигнал, который возвращается посредством передаваемого сигнала, отражающегося от любой поверхности.
Преобразователь 1420 сигналов может выполнять преобразование частоты для заданной области во временной области принимаемого сигнала, чтобы получать сигнал частотной области (например, спектрограмму).
Преобразователь 1420 сигналов может включать в себя преобразователь на основе кратковременного преобразования Фурье (STFT), преобразователь на основе быстрого преобразования Фурье (FFT), кепстральное (кепстральное) или вейвлет-преобразование. В этом случае, сигнал частотной области (спектрограмма) может быть двумерным или трехмерным.
Искусственная нейронная сеть 1430 может принимать сигнал частотной области (спектрограмму) в качестве входного сигнала, извлекать характеристики входного сигнала на основе обученной модели классификации поверхностей дороги и оценивать тип поверхности дороги.
Между тем, преобразователь 1420 сигналов может включать в себя аналого-цифровой преобразователь (ADC). ADC может преобразовывать аналоговый сигнал принимаемого сигнала в цифровой сигнал.
Блок коррекции ослабления в атмосфере (не показан) может вычислять и корректировать ослабление в атмосфере цифрового сигнала.
Искусственная нейронная сеть 1430 может выполнять свертку для входного сигнала на основе обученной модели классификации поверхностей дороги и оценивать тип поверхности дороги посредством классификации.
Между тем, искусственная нейронная сеть 1430 может классифицироваться и обучаться с использованием по меньшей мере одного или более деревьев решений, линейного дискриминантного анализа, логистических регрессионных классификаторов, наивных байесовских классификаторов, машин опорных векторов, классификаторов ближайших соседних узлов и ансамблевых классификаторов.
Деревья решений могут включать в себя точное дерево, среднее дерево, приблизительное дерево, всестороннее дерево и оптимизируемое дерево, дискриминантный анализ включает в себя линейный дискриминант, квадратический дискриминант, всесторонний дискриминант и оптимизируемый дискриминант, наивные байесовские классификаторы могут включать в себя гауссов наивный байесовский подход, ядерный наивный байесовский подход, всесторонний наивный байесовский подход и оптимизируемый наивный байесовский подход, машины опорных векторов (SVM) включают в себя линейную SVM, квадратическую SVM, кубическую SVM, точную гауссову SVM, среднюю гауссову SVM, приблизительную гауссову SVM, всестороннюю SVM и оптимизируемую SVM, классификаторы ближайших соседних узлов могут включать в себя точный KNN, средний KNN, приблизительный KNN, косинусоидальный KNN, кубический KNN, взвешенный KNN, всесторонний KNN и оптимизируемый KNN, и ансамблевые классификаторы могут включать в себя усиленные деревья, Bagged-деревья, подпространственный дискриминант, подпространственный KNN, RUSBoosted-деревья, всесторонние ансамбли и оптимизируемые ансамбли.
Контроллер 1440 (MCU) может управлять операциями звукового приемо-передающего устройства 1410, преобразователя 1420 сигналов и искусственной нейронной сети 1430.
Преобразователь 1420 сигналов и искусственная нейронная сеть 1430 выражают программное обеспечение, реализованное в программе в качестве компонента.
Между тем, хотя не проиллюстрировано на чертежах, устройство оценки типов поверхностей дороги с использованием звукового сигнала согласно различным вариантам осуществления настоящего изобретения включает в себя устройство хранения данных (запоминающее устройство), в котором сохраняются обученная модель классификации поверхностей дороги и программное обеспечение, реализованное в программе. Устройство хранения данных (запоминающее устройство) может быть включено в контроллер (MCU).
Между тем, устройство оценки типов поверхностей дороги с использованием звуков согласно настоящему изобретению дополнительно может включать в себя датчик состояния атмосферы (не проиллюстрирован), допускающий измерение температуры, влажности и атмосферного давления в воздухе.
Согласно управлению контроллера 1440, информация состояния атмосферы, включающая в себя температуру, влажность и атмосферное давление, может использоваться в блоке коррекции ослабления в атмосфере или передаваться во ввод искусственной нейронной сети 1430.
Фиг. 15 является схемой для описания передаваемых сигналов и принимаемых сигналов в устройстве оценки типов поверхностей дороги с использованием звукового сигнала согласно варианту осуществления настоящего изобретения.
Как проиллюстрировано на фиг. 15, контроллер 1440 (MCU) может передавать инициирующий сигнал, имеющий заданный период передачи (p: период передачи) с заданной абсолютной величиной (v: пусковое напряжение), в звуковое приемо-передающее устройство 1410.
После этого, звуковое передающее устройство 1411 звукового приемо-передающего устройства 1410 может выводить звуковой сигнал 1501, имеющий конкретную частоту, например, в 40 кГц, на соответствующую поверхность дороги для того, чтобы узнавать тип.
После этого, звуковое приемное устройство 1412 звукового приемо-передающего устройства 1410 может принимать отраженный сигнал, возвращающийся на поверхность дороги.
Здесь, сигнал 1502, принимаемый на той же временной шкале со звуковым сигналом 1501, может представлять собой сигнал перекрестных помех звукового сигнала, передаваемого посредством звукового приемо-передающего устройства 1410. Помимо этого, контроллер 1440 может определять сигнал 1503 в качестве принимаемого сигнала в течение заданного времени от точки, в которой амплитуда, принимаемая после задержки на передачу, является наибольшей.
Например, когда время, в которое амплитуда сигнала, принимаемого после сигнала перекрестных помех, является наибольшей, составляет t_0, в сумме (a+b) мс от t_0-a мс до t_0+b мс могут наблюдаться, и a равно 0,2, и b равно 5 в принимаемом сигнале 203 по фиг. 15. В зависимости от окружения или условий, a и b представляют собой значения переменных, которые могут регулироваться.
В примере по фиг. 15, 10 мс, что представляет собой время до тех пор, пока передаваемый звуковой сигнал не исчезает в достаточной степени, используется в качестве одного периода передачи, и частота дискретизации звукового приемо-передающего устройства 1410 составляет 1 МГц, что в 25 раз превышает частоту звуков в 40 кГц.
Между тем, как описано выше, множество принимаемых сигналов могут считываться согласно периоду передачи для того, чтобы считывать состояние поверхности дороги или один отраженный сигнал, принимаемый после передачи звука однократно, чтобы считывать состояние поверхности дороги.
Фиг. 16 является схемой для примерного пояснения преобразователя сигналов в устройстве оценки типов поверхностей дороги с использованием звукового сигнала согласно варианту осуществления настоящего изобретения.
На фиг. 16, в качестве примера описано использование преобразователя сигналов в преобразователе STFT.
Как показано на фиг. 16, преобразователь STFT может получать двумерную спектрограмму 1602 посредством кратковременного преобразования Фурье для сигналов 1503 и 1601 в течение заданного времени, принимаемых после задержки на передачу, за исключением сигнала 1502 перекрестных помех звукового сигнала, передаваемого посредством звукового приемо-передающего устройства 1410, из отраженных сигналов, принимаемых на фиг. 15.
Сигнал 1503 для одного периода может подвергаться преобразованию Фурье, либо принимаемый сигнал для нескольких периодов может подвергаться преобразованию Фурье.
В настоящем изобретении материал может различаться с использованием акустического импеданса и информации шероховатости поверхности. Акустический импеданс не представляет собой постоянную, и значение может варьироваться для каждой частоты, на которой вибрируют звуки. Следовательно, анализ в частотной области может быть полезным. Преобразование Фурье, которое представляет собой один из различных способов для преобразования принимаемого сигнала временной области в сигнал частотной области, может использоваться. Помимо этого, кратковременное преобразование Фурье может использоваться для того, чтобы подтверждать FFT в каждое время (время дискретизации).
Помимо этого, частотный анализ может быть возможным с использованием вейвлетов, и в одном варианте осуществления настоящего изобретения, в качестве примера описано, что STFT используется для уменьшения объема вычислений и обеспечения достаточного объема данных.
Кратковременное преобразование Фурье (STFT) представляет собой способ, спроектированный с возможностью учёта изменения во времени, которое не решено в существующем преобразовании Фурье. STFT должно делить длительный сигнал, который изменяется во времени, на короткие временные единицы, и затем применять преобразование Фурье.
Поскольку STFT разделяет сигнал согласно длине окна, длина сигнала, используемого для преобразования Фурье, уменьшается, и в силу этого разрешение частоты может ухудшаться. С другой стороны, когда длина окна увеличивается, с тем чтобы повышать разрешение частоты, разрешение времени может ухудшаться. Вейвлет-преобразование (WT) может использоваться для того, чтобы преодолевать ограничения разрешения вследствие компромиссной взаимосвязи между частотой и временем.
Если длина окна определяется в STFT, WT выполняет STFT несколько раз при изменении длины окна. Помимо этого, если синусоидальная кривая, которая продлевается временно до бесконечности, используется в качестве базовой функции в STFT, вейвлет имеет различные виды функций, которые существуют в течение конечного периода. Вейвлет-функция может включать в себя вейвлеты Морле, вейвлеты Добеши, койфлеты, биортогональные вейвлеты, вейвлеты типы «мексиканская шляпа», симлеты и т.д.
Фиг. 17 является схемой для пояснения искусственной нейронной сети в устройстве оценки типов поверхностей дороги с использованием звуков согласно варианту осуществления настоящего изобретения.
Как показано на фиг. 17, искусственная нейронная сеть может включать в себя глубокую нейронную сеть (DNN) алгоритма на основе многослойного перцептрона, включающую в себя входной слой 1701, множество скрытых слоев 1702 и выходной слой 1703. Помимо этого, искусственная нейронная сеть согласно различным вариантам осуществления настоящего изобретения может включать в себя глубокую сверточную нейронную сеть (DCNN) алгоритма на основе многослойного перцептрона, дополнительно включающую в себя блок выполнения свертки (не показан).
Входной слой 1701 может сглаживать данные спектрограммы 1702 и принимать сглаженные данные в идентификаторе.
Данные, вводимые во входной слой 1701, могут характеризоваться и классифицироваться через множество скрытых слоев 1702.
Выходной слой 1703 может выводить значение вероятности для каждого вида обученной поверхности дороги.
Искусственная нейронная сеть может определять и выводить вид поверхности дороги, имеющей наибольшую вероятность, из значений вероятностей, выводимых из выходного слоя 1703, посредством использования функции 1704 мягкого максимума.
С другой стороны, искусственная нейронная сеть может принимать информацию состояния атмосферы (информацию температуры, влажности и давления) и может использоваться в качестве ввода входного слоя 1701.
Помимо этого, искусственная нейронная сеть также может подвергать преобразованию Фурье звуковой сигнал 1501, передаваемый на поверхность дороги, и может использоваться в качестве ввода входного слоя 1701.
Между тем, когда искусственная нейронная сеть представляет собой DCNN, блок выполнения свертки может выполнять операции свертки для принимаемого цифрового входного сигнала многократно, выполнять пакетную нормализацию, функцию ReLU и функцию объединения в пул по максимуму для каждой операции свертки и выводить сглаженные данные в последней операции свертки в переходный слой.
В этом случае, переходный слой представляет собой входной слой 1701 CNN, и сглаженные выходные данные блока выполнения свертки могут приниматься в одном измерении (одномерные), и последующие операции являются одинаковыми с вышеописанным.
Фиг. 18 является схемой для пояснения работы блока выполнения свертки.
Блок выполнения свертки может выполнять множество (например, пять) операций свертки по идентификаторам для входного сигнала, выполнять пакетную нормализацию, ReLU и функцию объединения в пул по максимуму для каждой операции свертки, и вывод последней операции свертки может представлять собой сглаженные данные.
Обращаясь к фиг. 18, например, входной сигнал 1801 может составлять приблизительно 7000 принимаемых сигналов в течение 7 мс, результат 1802 выполнения первой свертки может представлять собой результат выполнения свертки по идентификаторам (64,16), BN, ReLU и MP (8) для входного сигнала 1801, результат 803 выполнения второй свертки может представлять собой результат выполнения свертки по идентификаторам (32,32), BN, ReLU и MP (8) для результата 1802 выполнения первой свертки, результат 1804 выполнения третьей свертки может представлять собой результат выполнения свертки по идентификаторам (16,64), BN, ReLU и MP (8) для результата 403 выполнения второй свертки, результат 1805 выполнения четвертой свертки может представлять собой результат выполнения свертки по идентификаторам (8,128), BN и ReLU для результата 1804 выполнения третьей свертки, и результат 1806 выполнения пятой свертки может представлять собой результат выполнения свертки по идентификаторам (4,2568), BN и ReLU для результата 1805 выполнения четвертой свертки.
Фиг. 19 является схемой, иллюстрирующей коды блока выполнения свертки устройства оценки типов поверхностей дороги с использованием звуков согласно настоящему изобретению.
Фиг. 19 является кодом, реализующим часть блока выполнения свертки, проиллюстрированного на фиг. 18, в программном обеспечении.
Коды могут включать в себя множество функций пакетной нормализации и функций объединения в пул по максимуму.
В качестве одного примера одного варианта осуществления настоящего изобретения, одномерная свертка, после которой выполняется одномерная пакетная нормализация, после которой выполняется объединение в пул по максимуму, повторяется в четырех наборах, и в завершение, вероятность в расчете на поверхность дороги выводится посредством вывода стольких значений, сколько составляет число поверхностей дороги, которые должны классифицироваться через полностью соединенный слой.
Между тем, в настоящем описании способ выполнения операций одномерной свертки описан в качестве примера, но операции свертки могут быть двумерными и трехмерными, а также одномерными.
Фиг. 20 является блок-схемой способа оценки типов поверхностей дороги с использованием преобразования области звуков согласно варианту осуществления настоящего изобретения.
Во-первых, чтобы осуществлять способ оценки типов поверхностей дороги с использованием преобразования области звуков согласно настоящему изобретению, сначала, этапу 2001 обучения может предшествовать формирование модели классификации поверхностей дороги.
На этапе 2001 обучения, для множества типов поверхностей дороги, после передачи звукового сигнала, прием отраженного сигнала, преобразование сигнала в сигнал частотной области (например, спектрограмму) и ввод сигнала частотной области (спектрограммы) в искусственную нейронную сеть для того, чтобы обучать модель классификации поверхностей дороги.
Здесь, чтобы преобразовывать сигналы частотной области, может использоваться STFT (кратковременное преобразование Фурье), FFT (быстрое преобразование Фурье), кепстральное или вейвлет-преобразование. Сигналы частотной области могут быть двумерными или трехмерными.
После этого, под управлением контроллера, звуковой сигнал может передаваться в соответствующие поверхности дороги для того, чтобы узнавать тип, и отраженный сигнал может приниматься (2002).
После этого, под управлением контроллера, преобразование сигналов может выполняться для предварительно установленной области принимаемого сигнала, чтобы получать сигнал частотной области (2003).
На этапе 2003 получения сигналов частотной области, сигнал частотной области может получаться посредством преобразования области сигнала в течение заданного времени, принимаемого после задержки на передачу каждый период звукового сигнала, за исключением сигнала перекрестных помех передаваемого звукового сигнала.
После этого, под управлением контроллера, сигнал частотной области может представлять собой входной сигнал искусственной нейронной сети, и характеристики входного сигнала могут извлекаться и классифицироваться на основе обученной модели классификации поверхностей дороги для того, чтобы определять тип поверхности дороги (2004).
Искусственная нейронная сеть может включать в себя глубокую нейронную сеть ( DNN) алгоритма на основе многослойного перцептрона, включающую в себя входной слой 1701, множество скрытых слоев 1702 и выходной слой 1703. В этом случае, выходной слой 1703 может выводить значение вероятности для каждого типа обученной поверхности дороги, и искусственная нейронная сеть может определять тип поверхности дороги, имеющей наибольшую вероятность, посредством использования функции 1704 мягкого максимума.
Искусственная нейронная сеть может принимать информацию состояния атмосферы (информацию температуры, влажности и атмосферного давления) и может использоваться в качестве входного слоя.
Помимо этого, искусственная нейронная сеть также может преобразовывать звуковой сигнал, передаваемый на поверхность дороги, в преобразование Фурье, и может использоваться в качестве входного слоя.
Фиг. 21 является блок-схемой, иллюстрирующей вариант осуществления способа оценки типа поверхности дороги с использованием звуков согласно настоящему изобретению.
Во-первых, чтобы осуществлять способ оценки типа поверхности дороги с использованием звуков согласно настоящему изобретению, этапу 2101 обучения может предшествовать формирование модели классификации поверхностей дороги.
На этапе 2101 обучения, звуковой сигнал может передаваться во множество типов поверхностей дороги, и затем отраженный сигнал может приниматься, и соответствующий сигнал может преобразовываться в цифровой сигнал, и преобразованный цифровой сигнал может вводиться в искусственную нейронную сеть для того, чтобы выполнять операцию множественной свертки для того, чтобы обучать модель классификации поверхностей дороги.
После этого, под управлением контроллера, звуковой сигнал может передаваться на соответствующую поверхность дороги для того, чтобы узнавать тип, и затем отраженный сигнал может приниматься (2102).
После этого, под управлением контроллера, аналоговый сигнал может преобразовываться в цифровой сигнал для предварительно установленной области принимаемого сигнала (2103).
На этапе 2103 преобразования сигналов, за исключением сигнала перекрестных помех передаваемого звукового сигнала, для каждого периода звукового сигнала, сигнал в течение заданного времени может преобразовываться в цифровой сигнал на основе точки, в которой амплитуда принимаемого сигнала после задержки на передачу является наибольшей.
Например, когда время, в которое амплитуда сигнала, принимаемого после сигнала перекрестных помех, является наибольшей, составляет t_0, в сумме (a+b) мс от t_0-a мс до t_0+b мс могут наблюдаться, и a и b могут переменно регулироваться согласно окружению или условию.
После этого, под управлением контроллера, цифровой сигнал может приниматься, чтобы выполнять несколько сверточных операций для искусственной нейронной сети (2104).
На этапе 2104 выполнения операции свертки, операция свертки может выполняться для цифрового сигнала многократно, и пакетная нормализация, функция ReLU и функция объединения в пул по максимуму могут выполняться для каждой операции свертки, и вывод последней операции свертки представляет собой сглаженные данные.
Между тем, в настоящем описании способ выполнения операции одномерной свертки описан в качестве примера, но операция свертки может быть двумерной и трехмерной, а также одномерной.
После этого, под управлением контроллера, на основе модели классификации поверхностей дороги, обученной посредством искусственной нейронной сети, характеристики сигнала после выполнения свертки (сглаженных данных) могут извлекаться и классифицироваться, чтобы определять тип поверхности дороги (2105).
Искусственная нейронная сеть может включать в себя блок выполнения свертки, который принимает цифровой сигнал и выполняет множество операций свертки, и глубокую сверточную нейронную сеть (DCNN) алгоритма на основе многослойного перцептрона, которая включает в себя переходный слой, множество скрытых слоев и выходной слой. В этом случае, выходной слой может выводить значение вероятности для каждого типа обученной поверхности дороги, и искусственная нейронная сеть может определять и выводить тип поверхности дороги, имеющей наибольшую вероятность, с использованием функции мягкого максимума.
Искусственная нейронная сеть может принимать информацию состояния атмосферы (информацию температуры, влажности, атмосферного давления) и может использоваться в качестве ввода блока выполнения свертки.
Помимо этого, искусственная нейронная сеть может использовать звуковой сигнал, передаваемый на поверхность дороги, в качестве ввода блока выполнения свертки.
Фиг. 22 является блок-схемой, иллюстрирующей способ оценки типа поверхности дороги с использованием звуков, имеющих скорректированную величину ослабления в атмосфере согласно варианту осуществления настоящего изобретения.
Во-первых, чтобы осуществлять способ оценки типа поверхности дороги с использованием звуков согласно настоящему изобретению, этапу (2201) обучения может предшествовать формирование модели классификации поверхностей дороги.
На этапе 2201 обучения, для множества поверхностей дороги, звуковой сигнал передается, отраженный сигнал принимается, соответствующий сигнал может преобразовываться в цифровой сигнал, преобразованный цифровой сигнал может корректироваться на предмет ослабления в атмосфере и преобразовываться в сигнал частотной области, и сигнал частотной области вводится в нейронную сеть для того, чтобы обучать модель классификации поверхностей дороги.
Здесь, на этапе 2201 обучения, чтобы преобразовывать сигналы частотной области, может использоваться STFT (кратковременное преобразование Фурье), FFT (быстрое преобразование Фурье), кепстральное или вейвлет-преобразование. Сигналы частотной области могут быть двумерными или трехмерными.
После этого, на основе управления контроллером, звуковой сигнал может передаваться на соответствующую поверхность дороги, для которой требуется узнавать тип, и отраженный сигнал может приниматься (2202).
После этого, на основе управления контроллером, аналоговый сигнал заданной зоны принимаемого сигнала может преобразовываться в цифровой сигнал (2203).
На этапе 2203 преобразования сигналов, за исключением сигнала перекрестных помех передаваемого звукового сигнала, для каждого периода звукового сигнала, сигнал в течение заданного времени может преобразовываться в цифровой сигнал на основе точки, в которой амплитуда принимаемого сигнала после задержки на передачу является наибольшей.
Например, когда время, в которое амплитуда сигнала, принимаемого после сигнала перекрестных помех, является наибольшей, составляет t_0, в сумме (a+b) мс от t_0-a мс до t_0+b мс могут наблюдаться, и a и b могут переменно регулироваться согласно окружению или условию.
После этого, величина ослабления в атмосфере цифрового сигнала может вычисляться и корректироваться посредством управления контроллером (2204).
На этапе (2204) коррекции ослабления в атмосфере, величина ослабления в атмосфере может вычисляться и корректироваться с использованием нижеприведенных уравнений 1-8. Этап коррекции ослабления в атмосфере может выполняться посредством блока коррекции ослабления в атмосфере, который представляет собой программное обеспечение, реализованное посредством контроллера или программы.
Во-первых, давление (Psat) насыщения может вычисляться с использованием нижеприведенного уравнения 1.
уравнение 1

Здесь, To1 является тройной точкой K атмосферы, и T является текущей температурой [K].
Абсолютная влажность (h) может вычисляться с использованием нижеприведенного уравнения 2.
уравнение 2

Здесь, hrin является относительной влажностью [%], Psat является давлением насыщения [единицы], и Ps является постоянным давлением [атм.].
Между тем, масштабированная частота (FrN) релаксации для азота, занимающего 78% атмосферы, может вычисляться с использованием нижеприведенного уравнения 3.
уравнение 3
Здесь, To является опорной температурой [K], и T является текущей температурой [K].
Между тем, масштабированная частота (FrO) релаксации для кислорода, занимающего 21% атмосферы, может вычисляться с использованием нижеприведенного уравнения 4.
уравнение 4

Здесь, h является абсолютной влажностью.
Между тем, коэффициент ослабления (α: коэффициент ослабления [неперов/м]) может вычисляться с использованием нижеприведенного уравнения 5.
уравнение 5
Здесь, Ps является постоянным давлением, F является частотой звукового сигнала (передаваемого звукового сигнала), T является текущей температурой [K], To является опорной температурой [K], FrO является масштабированной частотой релаксации для кислорода, и FrN является масштабированной частотой релаксации для азота.
Между тем, коэффициент ослабления (A, [единицы: дБ]) звукового сигнала может вычисляться с использованием нижеприведенного уравнения 6.
уравнение 6

Здесь, α является коэффициентом ослабления, и d является расстоянием между звуковым приемо-передающим устройством 100 и соответствующей поверхностью дороги, для которой требуется узнавать тип.
d может вычисляться с использованием нижеприведенного уравнения 7, с использованием t (времени пролета) от времени, когда сигнал передается из передающего устройства, до времени, когда он отражается от поверхности дороги и обнаруживается посредством приемного устройства, и скорости (Vair) звука в атмосфере.
уравнение 7
Здесь, t является временем пролета и Vair является скоростью звука в атмосфере [м/с].
Между тем, скорость звука в атмосфере может вычисляться с использованием нижеприведенного уравнения 8.
уравнение 8
Здесь, Ks является коэффициентом изоэнтропического объемного расширения объекта (коэффициентом жесткости), и ρ является плотностью объекта (атмосферы).
В этом случае, при условии, что воздух (атмосфера) является идеальным воздухом, Ks=γP, γ является коэффициентом теплоемкости (1,4 в случае воздуха), P является давлением, R является постоянной идеального воздуха, и T является абсолютной температурой [K]. Поскольку, за исключением температуры, они представляют собой постоянные, они также могут приблизительно выражаться.
Скорость звука в атмосфере может корректироваться и использоваться для компенсации ослабления согласно температуре, атмосферному давлению и влажности воздуха.
После этого, под управлением контроллера, сигнал частотной области может получаться посредством выполнения преобразования сигналов для заданной области скорректированного цифрового сигнала (2205).
На этапе 2205 получения сигналов частотной области, сигнал частотной области может получаться посредством преобразования частоты сигнала в течение заданного времени, принимаемого после задержки на передачу относительно преобразователя сигналов в каждом периоде звукового сигнала, за исключением сигнала перекрестных помех передаваемого звукового сигнала из скорректированного цифрового сигнала.
После этого, под управлением контроллера, сигнал частотной области может представлять собой входной сигнал нейронной сети, и характеристики входного сигнала могут извлекаться и классифицироваться на основе обученной модели классификации поверхностей дороги для того, чтобы определять тип поверхности дороги (2206).
Нейронная сеть может включать в себя глубокую нейронную сеть (DNN) алгоритма на основе многослойного перцептрона, включающую в себя входной слой, множество скрытых слоев и выходной слой. В этом случае, выходной слой может выводить значение вероятности для каждого типа обученной поверхности дороги, и нейронная сеть может определять и выводить тип поверхности дороги, имеющей наибольшую вероятность, с использованием функции мягкого максимума.
Между тем, структура нейронной сети не ограничена DNN, упомянутой выше.
Нейронная сеть может принимать информацию состояния атмосферы (информацию температуры, влажности и атмосферного давления) и может использоваться в качестве ввода входного слоя.
Помимо этого, нейронная сеть может частотно преобразовывать звуковой сигнал, передаваемый на поверхность дороги, и может использоваться в качестве ввода входного слоя.
Между тем, вместо получения сигнала частотной области на этапе получения сигналов частотной области и ввода сигнала частотной области в искусственную нейронную сеть, искусственная нейронная сеть может принимать цифровой сигнал, который корректируется посредством величины ослабления в атмосфере, и выполнять несколько операций свертки под управлением контроллера.
На этапе выполнения операции свертки, операция одномерной свертки может выполняться многократно для цифрового сигнала, имеющего скорректированную величину ослабления в атмосфере, и пакетная нормализация, функция ReLU и функция объединения в пул по максимуму могут выполняться для каждой операции свертки, и вывод последней операции свертки может представлять собой сглаженные данные.
После этого, под управлением контроллера, характеристики свернутого сигнала (сглаженных данных) могут извлекаться и классифицироваться на основе модели классификации поверхностей дороги, обученной посредством искусственной нейронной сети для того, чтобы определять тип поверхности дороги.
В случае выполнения свертки, искусственная нейронная сеть может включать в себя глубокую сверточную нейронную сеть (DCNN) алгоритма на основе многослойного перцептрона, дополнительно включающую в себя блок выполнения свертки, принимающий цифровой сигнал и выполняющий несколько операций свертки. Выходной слой может выводить значение вероятности для каждого типа обученной поверхности дороги, и искусственная нейронная сеть может определять и выводить тип поверхности дороги, имеющей наибольшую вероятность, с использованием функции мягкого максимума.
Между тем, структура искусственной нейронной сети не ограничена DCNN, упомянутой выше.
Искусственная нейронная сеть может принимать информацию состояния атмосферы (информацию температуры, влажности и атмосферного давления) и может использоваться в качестве ввода блока выполнения свертки.
Помимо этого, искусственная нейронная сеть также может использовать звуковой сигнал, передаваемый на поверхность дороги, в качестве ввода блока выполнения свертки.
Ниже в данном документе более подробно описан подробный вариант осуществления, в котором устройство классификации поверхностей дороги согласно варианту осуществления настоящего изобретения устанавливается и работает в дорожной инфраструктуре.
Фиг. 23 является схемой для пояснения системы мониторинга состояния дороги, включающей в себя видеодатчик и звуковой датчик согласно варианту осуществления настоящего изобретения. Фиг. 23 является конкретным вариантом осуществления дорожной инфраструктуры, проиллюстрированной на фиг. 2.
Как проиллюстрировано на фиг. 23, структура 2301 расположена на дороги 2300 или около неё, и звуковой датчик 2310 и видеодатчик 2320 предусмотрены в структуре 2301.
Звуковой датчик 2310 может быть предусмотрен в структуре 2301 таким образом, что он расположен на поверхности дороги транспортного средства на дороге 2300, и является перпендикулярным поверхности дороги, и видеодатчик 2320 может устанавливаться в структуре 2301 таким образом, что фотографируется полная зона дороги.
Между тем, на фиг. 23, проиллюстрирован блок 2350 связи для передачи данных, полученных из звукового датчика 2310 и видеодатчика 2320, в контроллер (не проиллюстрирован).
Видеодатчик 2320 распространяет решения, комбинированные с моделями на основе искусственного интеллекта, на всю область промышленного применения вместе с развитием искусственных нейронных сетей и представляет собой одну из общепринятых технологий в области техники распознавания, обнаружения и сегментации объектов. Вследствие развития технологии искусственного интеллекта, реализуется алгоритм, который обеспечивает возможность видеодатчику 2320 работать способом, аналогичным способу, в котором пользователь интуитивно распознает цель из фотографии (изображения) и отличает область.
Между тем, распознавание объекта с использованием звукового датчика 2310 является возможным посредством анализа форм сигналов для сигнала, отражаемого после удара о поверхность цели распознавания, с использованием звуков, и отраженная волна определяется согласно акустическому импедансу или шероховатости поверхности для поверхности цели, в которой достигается отражение. Иными словами, звуковой датчик 2310, если он использует широкий диапазон звуковых спектров, является устойчивым ко внешнему шуму и обеспечивает распознавание гололеда поверхности дороги.
Вариант осуществления включает в себя описание способа точного распознавания поверхности дороги широкого диапазона посредством слияния видеодатчика, который может отличительно интуитивно распознавать широкую зону, и технологии на основе звукового датчика, которая может точно распознавать цель без влияния посредством источника света за счет использования физических свойств целевого объекта.
Фиг. 24 является схемой конфигурации системы мониторинга состояния дороги, включающей в себя видеодатчик и звуковой датчик согласно варианту осуществления настоящего изобретения.
Как проиллюстрировано на фиг. 24, система мониторинга состояния дороги, включающая в себя видеодатчик и звуковой датчик согласно варианту осуществления настоящего изобретения, может включать в себя звуковой датчик 2410, видеодатчик 2420, искусственную нейронную сеть 2430, блок 2440 обработки сегментации и контроллер 2470.
Звуковой датчик 2410 может передавать звуковой сигнал в заданную точку для мониторинга состояния дороги и может принимать отраженный сигнал.
Видеодатчик 2420 может получать изображение поверхности дороги, включающее в себя заданную точку.
Искусственная нейронная сеть 2430 может классифицировать состояние поверхности дороги заданной точки на основе обученной модели классификации состояний дороги посредством использования отраженного сигнала, полученного посредством звукового датчика 2410, в качестве входного сигнала. Состояние поверхности дороги может включать в себя сухую дорогу, воду, гололед и снег.
Блок (2440) обработки сегментации может разделять изображение, полученное посредством видеодатчика (2420), на множество отличающихся областей сегментации на основе модели сегментации в качестве входного сигнала.
Контроллер (2470) может управлять операциями звукового датчика (2410), видеодатчика (2420), искусственной нейронной сети (2430) и блока (2440) обработки сегментации и определять состояние поверхности дороги для соответствующей дороги посредством слияния состояния поверхности дороги заданной точки, выводимого из искусственной нейронной сети (2430), и множества сегментированных областей, выводимого из блока (2440) обработки сегментации.
Ниже подробно описан процесс определения, посредством контроллера (2470), состояния поверхности дороги для соответствующей дороги с обращением к фиг. 27.
Контроллер (2470) может вычислять область сегментации, включающую в себя точку, в которой звуковой датчик ударяется о землю. Тем не менее, предпочтительно, если точка удара о землю (область считывания) звукового датчика во время установки системы согласно настоящему изобретению определяется в качестве секции нормального замерзания на поверхности дороги, и положение области считывания может быть уже известно в системе.
В завершение, звуковой датчик может выводить информацию изображений посредством назначения класса по классификации (типа поверхности дороги) данных формы сигнала области сегментации, включающей в себя точку, в которой происходит удар о землю (области считывания).
Фиг. 25 является схемой, иллюстрирующей пример распознавания однородного состояния поверхности дороги в системе мониторинга состояния дороги, включающей в себя видеодатчик и звуковой датчик согласно варианту осуществления настоящего изобретения.
Обращаясь к фиг. 25, (a) является сфотографированным изображением видеодатчика (2420), и отображается положение области (2500) считывания (заданной области) звукового датчика (2410). (b) показывает, что сегментированная область отображается посредством сегментации сфотографированного изображения (a). (c) классифицирует тип поверхности дороги на основе обученной модели классификации поверхностей дороги (модели на основе искусственного интеллекта) и считывает состояние поверхности дороги области считывания (2500). (d) показывает изображение, в котором область гололеда в итоге отображается посредством нахождения области сегментации, включающей в себя область (2500), считываемую в (c), из областей сегментации по (b).
Здесь, (b) показывает то, что полная зона дороги разделяется на одну область сегментации, и область (2500) считывания, в которой поверхность дороги считывается через звуковой датчик (2410), считывается в качестве гололеда, и в силу этого результаты (d) могут в итоге выводиться.
Фиг. 26 является схемой, иллюстрирующей пример распознавания состояния неоднородной поверхности дороги в системе мониторинга состояния дороги, включающей в себя видеодатчик и звуковой датчик согласно варианту осуществления настоящего изобретения.
Обращаясь к фиг. 26, (a) является сфотографированным изображением видеодатчика (2420), и отображается положение области (2600) считывания (заданной области) звукового датчика (2410). (b) показывает то, что сегментированная область отображается посредством сегментации сфотографированного изображения (a). (c) классифицирует тип поверхности дороги на основе обученной модели классификации поверхностей дороги (модели на основе искусственного интеллекта) и считывает состояние поверхности дороги области считывания (300). (d) показывает изображение, в котором область гололеда в итоге отображается, посредством нахождения областей сегментации (b).
Здесь, (b) может разделяться на множество областей сегментации, включающих в себя влажную область и сухую область дороги, и поскольку область 2600 считывания, обнаруженная посредством звукового датчика 2410, обнаружена в качестве гололеда, результаты, как показано в (d), могут в итоге выводиться.
Другими словами, настоящее изобретение может включать в себя технологию, которая может надежно определять проблему того, какая часть/область изображения поверхности дороги, полученного посредством видеодатчика, соответствует информации поверхности дороги, корректно распознанной посредством звукового датчика, через видеодатчик.
В настоящем изобретении работа алгоритма обнаружения поверхностей дороги может выполняться посредством периодических (мин., вторая единица) или несинхронных запросов, и считывание опасности скольжения по поверхности дороги может получать данные через звуковой датчик и видеодатчик, считывать тип (состояние) поверхности дороги на основе данных, полученных посредством звукового датчика, и обнаруживать область, включающую в себя участок считывания звукового датчика, через сегментацию изображений в изображении, полученном посредством видеодатчика.
Иными словами, когда опасность гололеда считывается на поверхности дороги, информация опасности может комбинироваться в изображении, разделенном на области, в качестве результата сегментации, и информация опасности может использоваться в форме передачи уведомления относительно опасной секции на поверхности дороги администратору (на сервер обслуживания).
Фиг. 27 является схемой для пояснения способа нахождения области сегментации области считывания звукового датчика в системе мониторинга состояния дороги, включающей в себя видеодатчик и звуковой датчик согласно варианту осуществления настоящего изобретения.
Контроллер может определять состояние поверхности дороги для дороги посредством слияния состояния поверхности дороги заданной точки, выводимого из искусственной нейронной сети, и множества областей сегментации, выводимого из блока 2440 обработки сегментации.
Контроллер вычисляет положение средней точки каждой из областей сегментации, вычисляет линейное уравнение для множества сегментов линии, включенных в каждую из областей сегментации (причем множества сегментов линии формируют каждую из областей сегментации), определяет первую положительно-отрицательную взаимосвязь между средней точкой соответствующей области и каждым из множества сегментов линии с использованием линейного уравнения для каждой из областей сегментации, определяет вторую положительно-отрицательную взаимосвязь между заданной точкой и каждым из множества сегментов линии с использованием линейного уравнения для каждой из областей сегментации и определяет область сегментации, в которой вторая положительно-отрицательная взаимосвязь и первая положительно-отрицательная взаимосвязь совпадают между собой, в качестве области, включающей в себя заданную точку.
Обращаясь к фиг. 27, предполагается, что входное изображение RGB разделяется на множество областей после сегментирования, и из них, область A и область B разделяются так, как показано на чертеже.
Средняя точка «области A» представлена позицией «2701», средняя точка «области B» представлена позицией «2702», и область считывания звукового датчика (заданная точка) представлена позицией «2700».
На фиг. 27, положительно-отрицательная взаимосвязь задается как то, что вправо и вниз представляет собой направление (+), а влево и вверх представляет собой направление (-) относительно точки (0,0) в верхнем левом углу изображения.
Область A формируется из пятиугольника и состоит из сегментов 14, 45, 56, 67 и 71 линии.
Положительно-отрицательная взаимосвязь между средней точкой 2701 области A и сегментами 14, 45, 56, 67 и 71 линии области A становится (-), (-), (-), (+) и (+), соответственно.
Область B формируется в четырехугольнике и включает в себя сегменты 12, 23, 34 и 41 линии.
Положительно-отрицательная взаимосвязь между средней точкой 2702 области B и сегментами 12, 23, 34 и 41 линии области B становится (+), (-), (-) и (+), соответственно.
В этом случае, положительно-отрицательная взаимосвязь между областью обнаружения (заданной точкой) звукового датчика 2700 и сегментами 14, 45, 56, 67 и 71 линии области A становится (+), (-), (-), (+) и (+), соответственно, и положительно-отрицательная взаимосвязь между сегментами 12, 23, 34 и 41 линии области B становится (+), (-), (-) и (+), соответственно.
Следовательно, область обнаружения (заданная точка) звукового датчика 2700 включается в область B.
Фиг. 28 является схемой для пояснения примера искусственной нейронной сети системы мониторинга дорожных условий, включающей в себя видеодатчик и звуковой датчик согласно варианту осуществления настоящего изобретения.
Обращаясь к фиг. 28, искусственная нейронная сеть может формироваться из модели на основе искусственного интеллекта, реализованной посредством любой из одномерной CNN (традиционной нейронной сети) или ANN (искусственной нейронной сети).
Ввод искусственной нейронной сети может представлять собой отраженный сигнал принимаемый через звуковой датчик, и вывод может представлять собой тип поверхности дороги заданной области обнаружения звукового датчика.
Фиг. 29 является схемой для пояснения примера блока обработки сегментации системы мониторинга дорожных условий, включающей в себя видеодатчик и звуковой датчик согласно варианту осуществления настоящего изобретения.
Обращаясь к фиг. 29, блок обработки сегментации может формироваться из модели сегментации изображений на основе традиционной нейронной сети (CNN), реализованной посредством автокодера или U-сети.
Ввод блока обработки сегментации представляет собой RGB-изображение, полученное через видеодатчик, и вывод представляет собой изображение для сегментации, в котором области, отличающиеся в изображении, отображаются.
Фиг. 30 является блок-схемой способа мониторинга в системе мониторинга дорожных условий, включающей в себя видеодатчик и звуковой датчик согласно варианту осуществления настоящего изобретения.
Во-первых, для мониторинга дорожных условий, звуковой датчик может принимать отраженный сигнал после передачи звукового сигнала в заданную точку 3010.
Затем состояние поверхности дороги заданной точки может классифицироваться на основе обученной модели классификации поверхностей дороги в качестве входного сигнала, который представляет собой отраженный сигнал, полученный посредством звукового датчика (3020).
Между тем, в то время как звуковой датчик передает звуковой сигнал и принимает отраженный сигнал, видеодатчик может получать изображение поверхности дороги, включающее в себя заданную точку (3030).
После этого, изображение, полученное посредством видеодатчика, может разделяться на множество отличающихся областей сегментации на основе модели сегментации (3040).
Затем состояние поверхности дороги может анализироваться посредством объединения состояния поверхности дороги заданной точки и множества отличающихся областей сегментации (3050).
После этого, состояние поверхности дороги для соответствующей дороги может определяться согласно этапу 3050 анализа посредством объединения (3060).
После этого, может определяться, обнаружена ли опасность в состоянии поверхности дороги для соответствующей дороги (3070).
В качестве результата определения этапа 3070 обнаружения опасности, опасность может не обнаруживаться в состоянии поверхности дороги для соответствующей дороги, и в силу этого периодически может осуществляться переход к этапам 3010 и 3030.
Между тем, в качестве результата определения этапа 3070 обнаружения опасности, может передаваться сигнал для уведомления в отношении опасности на сервер обслуживания , поскольку в состоянии поверхности дороги для соответствующей дороги (3080) обнаружена опасность.
Между тем, на этапе (3080) уведомления в отношении опасности, опасная область может отображаться в изображении, включающем в себя множество отличающихся сегментированных областей, и передаваться на сервер обслуживания.
Фиг. 31 является подробной блок-схемой для этапа 3050 анализа посредством объединения по фиг. 30.
Этап 3050 анализа посредством объединения может включать в себя выполнение следующих этапов.
Во-первых, в сегментированном изображении вычисляется положение средней точки каждой сегментированной области (3051).
После этого, линейное уравнение вычисляется для множества сегментов линии (причем множество сегментов линии формируют каждую сегментированную область), включенных в каждую сегментированную область (3052).
После этого, для каждой сегментированной области, первая положительно-отрицательная взаимосвязь для каждого из множества сегментов линии и средней точки соответствующей зоны определяется с использованием линейного уравнения (3053).
После этого, для каждой сегментированной области, вторая положительно-отрицательная взаимосвязь для каждого из множества сегментов линии и заданной точки определяется с использованием линейного уравнения (3054).
После этого, сегментированная область, в которой вторая положительно-отрицательная взаимосвязь и первая положительно-отрицательная взаимосвязь совпадают между собой, определяется в качестве зоны, включающей в себя заданную точку (3055).
Фиг. 32 является схемой конфигурации системы мониторинга состояния дороги, включающей в себя видеодатчик и звуковой датчик, согласно другому варианту осуществления настоящего изобретения.
Как показано на фиг. 32, система мониторинга состояния дороги, включающая в себя видеодатчик и звуковой датчик согласно варианту осуществления настоящего изобретения, может включать в себя звуковой датчик 3210, видеодатчик 3220, модуль 3281 извлечения первых признаков, модуль 3282 извлечения вторых признаков, комбинированную искусственную нейронную сеть 3290 (объединенный класс) и контроллер 3270.
Звуковой датчик 3210 может передавать звуковой сигнал в заданную точку для мониторинга состояния дороги и принимать отраженный сигнал.
Видеодатчик 3220 может получать изображение поверхности дороги, включающее в себя заданную точку.
Модуль 3281 извлечения первых признаков может извлекать первый признак из отраженного сигнала, полученного посредством звукового датчика 3210.
Модуль 3282 извлечения вторых признаков может извлекать второй признак из изображения, полученного посредством видеодатчика 3220.
Комбинированная искусственная сеть 3290 может классифицировать состояние поверхности дороги для соответствующей дороги на основе обученной объединенной классификационной модели данных поверхностей дороги на основе ввода сигнала, полученного посредством звукового датчика 3210, и изображения, полученного посредством видеодатчика 3220. Состояние поверхности дороги может включать в себя сухое, воду, гололед (лед) и снег.
Контроллер 3270 может управлять операциями звукового датчика 3210, видеодатчика 3220, модуля 3281 извлечения первых признаков, модуля 3282 извлечения вторых признаков и комбинированной искусственной нейронной сети 3290.
В комбинированной искусственной нейронной сети 3290, первый признак, извлеченный из отраженного сигнала, и второй признак, извлеченный из изображения, могут обучаться и классифицироваться посредством классификационной модели (объединенной классификационной модели данных), которая отдельно взвешивает каждый из них.
Первый признак, извлеченный из отраженного сигнала, и второй признак, извлеченный из изображения, могут обучаться в отношении классификации объектов (типов поверхностей дороги) посредством комбинирования данных изображений и звуковых данных с использованием корреляции (соответствия). Помимо этого, они могут обучаться посредством анализа характеристик данных с возможностью регулирования весового коэффициента и влияния классификатора на основе данных изображений и классификатора на основе звуковых данных для принятия окончательного решения (прогнозирования).
Фиг. 33 является блок-схемой другого варианта осуществления способа мониторинга в системе мониторинга состояния дороги, включающей в себя видеодатчик и звуковой датчик согласно настоящему изобретению.
Во-первых, для мониторинга состояния дороги, звуковой датчик может передавать звуковой сигнал в заданную точку и затем принимать отраженный сигнал (3310).
После этого, первый признак отраженного сигнала может извлекаться (3320).
Между тем, в то время как звуковой датчик передает звук и принимает отраженный сигнал, видеодатчик может получать изображение поверхности дороги, включающее в себя заданную точку (3330).
После этого, второй признак изображения может извлекаться (3340).
После этого, состояние поверхности дороги для соответствующей дороги может анализироваться на основе классификационной модели, обученной посредством комбинирования первого признака, извлеченного из отраженного сигнала, и второго признака, извлеченного из изображения (3350).
Здесь, первый признак, извлеченный из отраженного сигнала, и второй признак, извлеченный из изображения, могут обучаться и классифицироваться посредством классификационной модели, которая отдельно взвешивает каждый из них.
После этого, состояние поверхности дороги для соответствующей дороги может определяться в соответствии с анализом этапа 3350 определения состояний поверхности дороги (3360).
После этого, может определяться, обнаруживается ли опасность в состоянии поверхности дороги для соответствующей дороги (3370).
В качестве результата определения этапа 3370 обнаружения опасности, опасность может не обнаруживаться в состоянии поверхности дороги для соответствующей дороги, и в силу этого периодически может осуществляться переход к этапам 3310 и 3330.
Между тем, в качестве результата определения этапа 3370 обнаружения опасности, опасность может обнаруживаться в состоянии поверхности дороги для соответствующей дороги, и в силу этого может передаваться сигнал на сервер обслуживания, информирующий об опасности (3380).
Между тем, на этапе 3380 уведомления в отношении опасности, опасная область может отображаться в изображении, включающем в себя множество различных сегментированных областей, и может передаваться на сервер обслуживания.
В дальнейшем в этом документе подробно описан конкретный вариант осуществления управления устройством с нагревательной проволокой или устройством-распылителем соляного раствора в качестве примера устройства обслуживания поверхности дороги согласно варианту осуществления.
Фиг. 34 является схемой для пояснения работы системы управления устройства с нагревательной проволокой согласно варианту осуществления. Фиг. 34 является конкретным вариантом осуществления дорожной инфраструктуры, проиллюстрированной на фиг. 2.
Как проиллюстрировано на фиг. 34, система управления дорожного устройства с нагревательной проволокой согласно варианту осуществления настоящего изобретения может включать в себя структуру 3401, расположенную на дороге, структура 3401 может включать в себя звуковой датчик 3410 и блок 3420 связи, и автоматическая контрольная коробка 3460, которая управляет нагревательной проволокой 3470 из устройства 3400 предотвращения замерзания, может управляться под управлением сервера 3440 управления на основе данных считывания звукового датчика 3410.
Звуковой датчик 3410 может устанавливаться на структуре 3401 таким образом, что он расположен на шоссе транспортного средства, и является перпендикулярным поверхности дороги, но не ограничен этим.
Структура 3401 означает то, во что может устанавливаться звуковой датчик 3410 на дороге, к примеру, уличный светильник.
Звуковой датчик 3410 может передавать звуковой сигнал в заданную точку для считывания состояния дороги и затем принимать отраженный сигнал.
Между тем, блок 3420 связи может передавать данные, полученные через звуковой датчик 3410, на сервер 3440 управления.
Помимо этого, если сервер 3440 управления считывает то, имеет ли место нарушение работы звукового датчика 3410 (или его работа является ненормальной), сервер 3440 управления может передавать уведомление в диспетчерский терминал 3450.
Из устройств предотвращения замерзания, в способе с использованием нагревательной проволоки, нагревательная проволока может работать дольше времени, требуемого для того, чтобы вызывать огонь на асфальте, так что важно управлять тем, сколько должна работать нагревательная проволока.
В настоящем изобретении можно точно управлять устройством предотвращения замерзания за счет считывания изменения температуры поверхности дороги вследствие нагрева нагревательной проволоки посредством звукового датчика.
В частности, можно формировать модели на основе искусственного интеллекта, обученные на основе данных считывания звука, накопленных в окружении поверхности дороги, к которому применяются различные температуры, и автоматически управлять работой устройства с нагревательной проволокой за счет считывания изменения температуры поверхности дороги посредством анализа форм сигналов звуковых датчиков, полученных на основе моделей на основе искусственного интеллекта.
Например, нагревательная проволока может запускаться после выяснения того, является поверхность дороги сухой или замерзшей, через анализ форм сигналов звукового датчика, и работа нагревательной проволоки может задаваться таким образом, что она прекращается, когда температура поверхности дороги на выводе звукового датчика поддерживается равной 4 градуса Цельсия или больше, т.е. когда температура выше точки замерзания воды.
Помимо этого, согласно настоящему изобретению, можно считывать, насколько соляной раствор распыляется на поверхность дороги в ходе работы устройства-распылителя соляного раствора.
В частности, можно формировать модели на основе искусственного интеллекта, обученные на основе данных считывания звука, накопленных в различных распределенных окружениях поверхности дороги, и анализировать формы сигналов звуковых датчиков, полученных на основе моделей на основе искусственного интеллекта, с тем чтобы определять степень рассеивания (распределения) (степень распыления) соляного раствора, распыленного на поверхность дороги. Если соляной раствор распределяется по заданному диапазону на поверхности дороги, может задаваться прекращение распыления соляного раствора.
Настоящее изобретение относится к технологии управления со взаимным связыванием устройств для считывания состояния поверхности дороги, в которой дорожное устройство с нагревательной проволокой или устройство-распылитель соляного раствора, которое устанавливается/работает, может работать во времени, и может точно управлять работой устройства с нагревательной проволокой или устройства-распылителя соляного раствора посредством определения распознавания состояния поверхности дороги и условий таяния на основе звукового датчика, вместо традиционного способа получения информации поверхности дороги посредством использования датчика температуры/влажности.
Она может подключаться к существующей системе мониторинга/управления снегоуборочным оборудованием без существенных модификаций и может оказывать услуги для повышения эффективности работы снегоуборочного оборудования на основе более точных уведомлений в отношении опасности на поверхности дороги, чем существующая снегоуборочная система.
Алгоритм для определения того, следует ли выполнять уборку снега, может компоноваться на сервере 3440 управления (на сервере предоставления услуг) либо может компоноваться в контроллере (MCU), предусмотренном вместе со звуковым датчиком 3410, и может иметь форму передачи в автоматическую контрольную коробку 3460 устройства 3400 предотвращения замерзания через блок связи.
Считывание состояния поверхности дороги многократно выполняется периодически до времени, в которое звуковой датчик должен обязательно восстанавливаться вследствие сбоя звукового датчика. Когда звуковой датчик 3410 получает отраженную волну (значение датчика), и затем передается на сервер 3440 управления (сервер оказания услуг) через блок связи, когда состояние датчика является нормальным, сервер 3440 управления анализирует отраженную волну с использованием модели на основе искусственного интеллекта с использованием технологии обработки больших данных, чтобы определять то, необходима ли текущая уборка снега, и управляет тем, работает ли соответствующее устройство предотвращения замерзания.
Между тем, то, является ли состояние нормальным или ненормальным, определяется через принимаемое значение датчика, когда состояние датчика является ненормальным, команда прекращения работы передается в автоматическую контрольную коробку 3460 устройства 3400 предотвращения замерзания, извещающий аварийный сигнал передается в диспетчерский терминал 3450 для возникновения анормальности, и предыстория прекращения работы передается на сервер управления (не показан) вследствие сбоя.
Фиг. 35 является схемой конфигурации системы управления устройства предотвращения замерзания дороги согласно варианту осуществления настоящего изобретения. Система управления по фиг. 35 является конкретным примером устройства обслуживания поверхности дороги согласно варианту осуществления настоящего изобретения.
Как показано на фиг. 35, система управления устройства предотвращения замерзания дороги согласно варианту осуществления настоящего изобретения может включать в себя звуковой датчик 3510, сервер 3540 управления, блок 3520 связи и устройство 3500 предотвращения замерзания.
Звуковой датчик 3510 может передавать звуковой сигнал в заданную точку для считывания состояния поверхности дороги и затем принимать отраженный сигнал.
Сервер 3540 управления может считывать данные состояния поверхности дороги заданной точки на основе обученной аналитической модели на основе искусственного интеллекта посредством использования отраженного сигнала, полученного посредством звукового датчика 3510, в качестве входного сигнала, и формировать сигнал для управления тем, работает ли устройство 3500 предотвращения замерзания, согласно данным состояния поверхности дороги заданной точки.
Данные состояния поверхности дороги могут включать в себя погодные условия, тип поверхности дороги, температуру поверхности дороги и распыленное количество соляного раствора (степень распыления, степень распределения).
Блок 3520 связи может передавать отраженный сигнал, полученный посредством звукового датчика 3510, на сервер 3540 управления.
Устройство 3500 предотвращения замерзания управляется посредством сервера 3540 управления таким образом, чтобы выполнять операцию для предотвращения льда на дороге. Устройство 3500 предотвращения замерзания может включать в себя по меньшей мере одно из устройства с нагревательной проволокой или устройства-распылителя соляного раствора.
Подробно, сервер 3540 управления может формировать управляющий сигнал для работы устройства с нагревательной проволокой, когда погодные условия представляют собой «дождь» или «снег», классифицированный тип поверхности дороги представляет собой «влажная дорога» или «заметенная снегом дорога», или «замерзшая дорога», и считываемая температура поверхности дороги меньше 4 градусов Цельсия, и формировать управляющий сигнал для прекращения работы устройства с нагревательной проволокой, когда считываемая температура поверхности дороги составляет 4 градуса Цельсия или более после того, как устройство с нагревательной проволокой работает.
Между тем, сервер 3540 управления может формировать управляющий сигнал для работы устройства-распылителя соляного раствора, когда погодные условия представляют собой «дождь» или «снег», классифицированный тип поверхности дороги представляет собой «влажная дорога» или «заметенная снегом дорога», или «замерзшая дорога», и считываемая температура поверхности дороги меньше 4 градусов Цельсия, и формировать управляющий сигнал для прекращения работы устройства-распылителя соляного раствора, когда считываемое распыленное количество соляного раствора составляет 80% или более после того, как устройство-распылитель соляного раствора работает.
Между тем, сервер 3540 управления может передавать сообщение уведомления в диспетчерский терминал 3550 и передавать сигнал уведомления в отношении состояния звукового датчика 3510 на сервер 3580 обслуживания, когда считывается, что состояние звукового датчика 3510 является анормальным.
Фиг. 36 является схемой конфигурации системы управления устройства предотвращения замерзания дороги согласно другому варианту осуществления настоящего изобретения.
Как проиллюстрировано на фиг. 36, система управления устройства предотвращения замерзания дороги согласно варианту осуществления настоящего изобретения включает в себя звуковой датчик 3610, контроллер 3630, блок 3620 связи и устройство 3600 предотвращения замерзания.
Звуковой датчик 3610 может передавать звуковой сигнал в заданную точку для считывания дорожных условий и принимать отраженный сигнал.
Контроллер 3630 может считывать данные состояния поверхности дороги в заданной точке на основе аналитической модели на основе искусственного интеллекта, обученной посредством использования отраженного сигнала, полученного посредством звукового датчика 3610, в качестве входного сигнала, и формировать сигнал для управления тем, работает ли устройство 3600 предотвращения замерзания, согласно данным состояния поверхности дороги в заданной точке.
Данные состояния поверхности дороги могут включать в себя погодные условия, тип поверхности дороги, температуру поверхности дороги и распыленное количество соляного раствора (степень распыления, степень распределения).
Блок 3620 связи может передавать управляющий сигнал, сформированный посредством контроллера 3630, в устройство 3600 предотвращения замерзания.
Устройство 3600 предотвращения замерзания управляется посредством контроллера 3630 таким образом, чтобы выполнять операцию для предотвращения замерзания дороги. Устройство 3600 предотвращения замерзания может включать в себя по меньшей мере одно из устройства с нагревательной проволокой или устройства-распылителя соляного раствора.
Подробно, контроллер 3630 может формировать управляющий сигнал для работы устройства с нагревательной проволокой, когда погодные условия представляют собой «дождь» или «снег», классифицированный тип поверхности дороги представляет собой «влажная» или «заснеженная», или «обледеневшая», и считываемая температура поверхности дороги меньше 4 градусов Цельсия, и формировать управляющий сигнал для прекращения работы устройства с нагревательной проволокой, когда считываемая температура поверхности дороги составляет 4 градуса Цельсия или более после того, как устройство с нагревательной проволокой работает.
С другой стороны, контроллер 3630 может формировать управляющий сигнал для работы устройства-распылителя соляного раствора, когда погодные условия представляют собой «дождь» или «снег», классифицированный тип поверхности дороги представляет собой «влажная» или «заснеженная», или «обледеневшая», и считываемая температура поверхности дороги меньше 4 градусов Цельсия, и может формировать управляющий сигнал для прекращения работы устройства-распылителя соляного раствора, когда считываемое количество соляного раствора составляет 80% или более после того, как устройство-распылитель соляного раствора работает.
С другой стороны, поскольку считывается то, что имеется анормальность в состоянии звукового датчика 3610, контроллер 3630 может передавать сообщение уведомления в диспетчерский терминал 3650 и может передавать сигнал уведомления в отношении состояния звукового датчика 3610 на сервер 3680 управления.
Фиг. 37A-37C являются схемами для описания аналитической модели на основе искусственного интеллекта, используемой в системе управления устройства предотвращения замерзания дороги согласно варианту осуществления настоящего изобретения.
Аналитическая модель на основе искусственного интеллекта может включать в себя модель классификации погодных условий для классификации погодных условий на основе отраженного сигнала, полученного посредством звукового датчика, и модель классификации типов поверхностей дороги для типа классификации поверхности дороги на основе отраженного сигнала, полученного посредством звукового датчика.
Когда устройство предотвращения замерзания представляет собой устройство с нагревательной проволокой, аналитическая модель на основе искусственного интеллекта дополнительно может включать в себя регрессионную модель для определения температуры поверхности дороги посредством обучения отраженного сигнала, полученного посредством звукового датчика, и температуры поверхности дороги вместе и вывода соответствующей температуры поверхности дороги на основе отраженного сигнала, полученного посредством звукового датчика.
Когда устройство предотвращения замерзания представляет собой устройство-распылитель соляного раствора, аналитическая модель на основе искусственного интеллекта дополнительно может включать в себя регрессионную модель для определения температуры поверхности дороги посредством обучения отраженного сигнала, полученного посредством звукового датчика, и температуры поверхности дороги вместе и вывода соответствующей температуры поверхности дороги на основе отраженного сигнала, полученного посредством звукового датчика, и регрессионную модель для определения распыленного количества соляного раствора посредством обучения отраженного сигнала, полученного посредством звукового датчика, и количества распыленного соляного раствора (степени распределения) вместе и вывода соответствующего количества распыленного соляного раствора (степени распределения) на основе отраженного сигнала, полученного посредством звукового датчика.
Иными словами, аналитическая модель на основе искусственного интеллекта согласно настоящему изобретению по существу включает в себя модель классификации погодных условий, модель классификации типов поверхностей дороги и регрессионную модель для определения температуры поверхности дороги, и когда устройство предотвращения замерзания включает в себя устройство-распылитель соляного раствора, аналитическая модель на основе искусственного интеллекта дополнительно может включать в себя регрессионную модель для определения распыленного количества соляного раствора.
Фиг. 37A иллюстрирует структуру модели классификации типов поверхностей дороги, и модель классификации типов поверхностей дороги сконфигурирована посредством дискретизации полученного сигнала (отраженного сигнала) звукового датчика T времен в сумме в течение заданного времени и обучения соответствующей информации типа поверхности дороги вместе.
Например, число 1000 данных, дискретизированных в единицах по 1 мс в течение 1 секунды (x1, x2..., x1000), и соответствующая информация типа поверхности дороги изучаются.
Как показано на фиг. 37A, полученный сигнал (отраженный сигнал) звукового датчика может вводиться, и соответствующий тип поверхности дороги может классифицироваться на такие классы, как «сухая», «влажная», «обледеневшая» и «заснеженная».
Между тем, хотя это не проиллюстрировано на чертежах, она дополнительно может включать в себя модель классификации погодных условий, которая классифицирует погодные условия на основе отраженного сигнала, полученного посредством звукового датчика, и это также обучает в отношении полученного сигнала звукового датчика и погодной информации вместе.
Фиг. 37B является схемой для пояснения регрессионной модели для определения температуры поверхности дороги, которая выводит температуру соответствующей поверхности дороги на основе отраженного сигнала, полученного посредством звукового датчика, чтобы управлять нагревательным устройством, и фиг. 37C является схемой для пояснения регрессионной модели для определения распыленного количества соляного раствора, которая выводит распределенное количество (степень распределения) (%) соответствующего соляного раствора на основе отраженного сигнала, полученного посредством звукового датчика, чтобы управлять устройством управления соляным раствором.
На фиг. 37B, X представляет собой набор данных, сформированный посредством концепции гиперплоскости, которая представляет собой набор различных значений, а не взаимосвязь между данными X для получения звукового датчика и температурой поверхности дороги представляет собой двумерный (плоский) график.
Соответственно, обученная регрессионная модель для определения температуры поверхности дороги выводит температуру соответствующей поверхности дороги на основе отраженного сигнала, полученного посредством звукового датчика.
Как показано на фиг. 37C, X представляет собой набор данных, сформированный посредством концепции гиперплоскости, которая представляет собой набор различных значений, а не взаимосвязь между данными X для получения звукового датчика и количеством распыленного соляного раствора (степенью распределения) представляет собой двумерный (плоский) график.
Соответственно, обученная регрессионная модель для определения распыленного количества соляного раствора выводит распыленное количество (степень распределения) соответствующего соляного раствора на основе отраженного сигнала, полученного посредством звукового датчика.
Фиг. 38 является блок-схемой варианта осуществления способа управления устройством предотвращения замерзания дороги согласно настоящему изобретению.
Во-первых, данные измерений звукового датчика собираются (3810).
Аналитическая модель на основе искусственного интеллекта формируется на основе собранных данных (3820).
Этап 3820 формирования аналитической модели на основе искусственного интеллекта формирует модель классификации погодных условий, которая классифицирует погодные условия на основе отраженного сигнала, полученного посредством звукового датчика, формирует модель классификации типов поверхностей дороги, которая классифицирует тип поверхности дороги на основе отраженного сигнала, полученного посредством звукового датчика, и формирует регрессионную модель для определения температуры поверхности дороги, которая выводит температуру поверхности дороги на основе отраженного сигнала, полученного посредством звукового датчика посредством обучения отраженного сигнала и температуры поверхности дороги вместе.
С другой стороны, когда устройство предотвращения замерзания представляет собой устройство-распылитель соляного раствора, этап 3820 формирования аналитической модели на основе искусственного интеллекта обучает в отношении отраженного сигнала, полученного посредством звукового датчика и распыленного количества (степени распределения) соляного раствора вместе, чтобы формировать регрессионную модель для определения распыленного количества соляного раствора, которая выводит соответствующее распыленное количество (степень распределения) на основе отраженного сигнала, полученного посредством звукового датчика.
Иными словами, аналитическая модель на основе искусственного интеллекта согласно настоящему изобретению по существу формирует и включает в себя модель классификации погодных условий, модель классификации типов поверхностей дороги и регрессионную модель для определения температуры поверхности дороги, и когда устройство предотвращения замерзания включает в себя устройство-распылитель соляного раствора, регрессионная модель для определения распыленного количества соляного раствора дополнительно формируется.
Конечно, сформированные аналитические модели на основе искусственного интеллекта должны монтироваться на сервере управления или контроллере.
После этого, звуковой сигнал передается в заданную точку для отслеживания состояния дороги с использованием звукового датчика, и затем отраженный сигнал принимается (3830).
После этого, сервер управления или контроллер считывают данные состояния поверхности дороги в заданной точке на основе аналитической модели на основе искусственного интеллекта посредством использования отраженного сигнала, полученного посредством звукового датчика, в качестве входного сигнала.
Этап 3840 считывания данных состояния поверхности дороги считывает погодные условия, тип поверхности дороги, температуру поверхности дороги и распыленное количество (степень распределения) соляного раствора.
После этого, сервер управления или контроллер формирует управляющий сигнал для управления тем, работает ли устройство предотвращения замерзания, на основе данных состояния поверхности дороги (3850).
После этого, когда сервер управления или контроллер обнаруживает то, что состояние звукового датчика является анормальным, сообщение уведомления передается в диспетчерский терминал, и сигнал уведомления в отношении состояния звукового датчика передается на сервер обслуживания (3860).
Фиг. 39 является подробной блок-схемой этапа 3850 формирования управляющих сигналов по фиг. 38, когда устройство предотвращения замерзания дороги согласно настоящему изобретению представляет собой устройство с нагревательной проволокой.
Когда устройство предотвращения замерзания представляет собой устройство с нагревательной проволокой, этап 3850 формирования управляющих сигналов сначала определяет то, представляют ли считываемые погодные условия собой «дождь» или «"снег» (3910).
В качестве результата этапа 3910 определения, если погодные условия не представляют собой «дождь» или «снег», осуществляется переход к этапу 3840, с тем чтобы обнаруживать данные состояния поверхности дороги.
Между тем, в качестве результата этапа 3910 определения, если погодные условия представляют собой «дождь» или «снег», определяется, является ли классифицированный тип поверхности дороги «влажной» или «заснеженной», или «обледеневшей» (3920).
В качестве результата этапа 3920 определения, если погодные условия представляют собой «дождь» или «снег», и если классифицированный тип поверхности дороги является «влажной» или «заснеженной» или «обледеневшей», осуществляется переход к этапу 3840 таким образом, чтобы обнаружить данные состояния поверхности дороги.
Между тем, в качестве результата этапа 3920 определения, если погодные условия представляют собой «дождь» или «снег», и если классифицированный тип поверхности дороги является «влажной» или «заснеженной» или «обледеневшей», определяется, является ли температура поверхности дороги меньшей, чем 4 градуса Цельсия (3930).
В качестве результата этапа 3930 определения, если температура поверхности дороги не меньше 4 градусов Цельсия, осуществляется переход к этапу S540, с тем чтобы обнаруживать данные состояния поверхности дороги.
Между тем, в качестве результата этапа 3930 определения, если температура поверхности дороги меньше 4 градусов Цельсия, формируется управляющий сигнал для работы устройства с нагревательной проволокой (3940).
После этого, осуществляется переход к этапу 3940 считывания данных состояния поверхности дороги, с тем чтобы обнаруживать данные состояния поверхности дороги.
После того, как устройство с нагревательной проволокой активируется, определяется то, больше или равна либо нет температура поверхности дороги 4 градусам Цельсия (3950).
В качестве результата этапа 3950 определения, если температура поверхности дороги не больше или равна 4 градусам Цельсия, осуществляется переход к этапу S540, с тем чтобы обнаруживать данные состояния поверхности дороги.
Между тем, в качестве результата этапа 3950 определения, если температура поверхности дороги больше или равна 4 градусам Цельсия, формируется управляющий сигнал для того, чтобы прекращать работу устройства с нагревательной проволокой (3960).
После этого, осуществляется переход к этапу 3840 считывания данных состояния поверхности дороги, с тем чтобы обнаруживать данные состояния поверхности дороги.
Другими словами, когда погодные условия представляют собой «дождь» или «снег», классифицированный тип поверхности дороги представляет собой «влажная» или «заснеженная», или «обледеневшая», и считываемая температура поверхности дороги меньше 4 градусов Цельсия, устройство с нагревательной проволокой работает, и после того, как устройство с нагревательной проволокой работает, работа устройства с нагревательной проволокой прекращается, когда считываемая температура поверхности дороги составляет 4 градуса Цельсия или больше.
Фиг. 40 является подробной блок-схемой для этапа 3850 формирования управляющих сигналов по фиг. 38, когда устройство предотвращения замерзания дороги согласно настоящему изобретению представляет собой устройство-распылитель соляного раствора.
Когда устройство предотвращения замерзания представляет собой устройство-распылитель соляного раствора, этап 3850 формирования управляющих сигналов сначала определяет то, представляют либо нет считываемые погодные условия собой «дождь» или «снег» (4010).
Если погодные условия не представляют собой «дождь» или «снег» в качестве результата этапа 4010 определения, осуществляется переход к этапу S540, с тем чтобы обнаруживать данные состояния поверхности дороги.
Между тем, если погодные условия представляют собой «дождь» или «снег» в качестве результата этапа 4010 определения, определяется то, представляет либо нет классифицированный тип поверхности дороги собой «влажная» или «заснеженная», или «обледеневшая» (4020).
Если погодные условия представляют собой «дождь» или «снег» в качестве результата этапа 4020 определения, и классифицированный тип поверхности дороги не представляет собой «влажная» или «заснеженная», или «обледеневшая», осуществляется переход к этапу 3840 для обнаружения данных условий на поверхности дороги.
Между тем, если погодные условия представляют собой «дождь» или «снег» в качестве результата этапа 4020 определения, и классифицированный тип поверхности дороги представляет собой «влажная» или «заснеженная», или «обледеневшая», определяется, является ли температура поверхности дороги меньшей, чем 4 градуса Цельсия (4030).
Если температура поверхности дороги не меньше 4 градусов Цельсия в качестве результата этапа 4030 определения, осуществляется переход к этапу 3840, с тем чтобы обнаруживать данные условий на поверхности дороги.
Между тем, если температура поверхности дороги меньше 4 градусов Цельсия в качестве результата этапа 4030 определения, формируется управляющий сигнал для работы устройства-распылителя соляного раствора (4040).
После этого, осуществляется переход к этапу 3840, с тем чтобы обнаруживать данные условий на поверхности дороги.
После того, как устройство-распылитель соляного раствора работает, определяется, что распыленное количество соляного раствора (степень распрыскивания) составляет 80% или более (4050).
Если распыленное количество соляного раствора (степень распрыскивания) не составляет 80% или более в качестве результата определения для определения 4050, осуществляется переход к этапу 3840, с тем чтобы обнаруживать данные условий на поверхности дороги.
Между тем, если распыленное количество соляного раствора (степень распрыскивания) составляет 80% или более в качестве результата этапа 4050 определения, формируется управляющий сигнал для того, чтобы прекращать работу устройства-распылителя соляного раствора (4060).
После этого, осуществляется переход к этапу 3840, с тем чтобы обнаруживать данные условий на поверхности дороги.
Другими словами, когда погодные условия представляют собой «дождь» или «снег», классифицированный тип поверхности дороги представляет собой «влажная дорога» или «заметенная снегом дорога», или «замерзшая дорога», и считываемая температура поверхности дороги меньше 4 градусов Цельсия, устройство-распылитель соляного раствора работает, и после того, как устройство-распылитель соляного раствора работает, работа устройства-распылителя соляного раствора прекращается, когда считываемое распыленное количество соляного раствора составляет 80% или больше.
Между тем, распыленное количество (степень распыления, распределение) соляного раствора для того, чтобы прекращать работу устройства-распылителя соляного раствора, составляет 80% или больше, но не ограничено этим.
Между тем, чтобы управлять работой устройства-распылителя соляного раствора, все из регрессионной модели для определения температуры поверхности дороги и регрессионной модели для определения распыленного количества соляного раствора используются вместе, но работа устройства-распылителя соляного раствора может управляться только с использованием регрессионной модели для определения распыленного количества соляного раствора.
Хотя вышеприведенный пример включает в себя устройство с нагревательной проволокой или устройство-распылитель соляного раствора в качестве устройства предотвращения замерзания дороги, настоящее изобретение не ограничено этим, и также можно управлять системой, включающей в себя устройство с нагревательной проволокой и устройство-распылитель соляного раствора вместе.
В вышеприведенном описании, способы согласно варианту осуществления настоящего изобретения могут реализовываться посредством машиночитаемого носителя записи, имеющего программу для реализации способов, сохраненных на нем, и/или программу, сохраненную на машиночитаемом носителе записи для реализации способов.
Иными словами, специалисты в данной области техники должны понимать, что программа инструкций для реализации способов согласно варианту осуществления настоящего изобретения материально реализуется таким образом, что программа может включаться в носитель записи, который может считываться через компьютер. Другими словами, она может реализовываться в форме программных инструкций, которые могут выполняться посредством различных компьютерных средств и записываться на машиночитаемом носителе записи. Машиночитаемый носитель записи может включать в себя программные инструкции, файлы данных, структуры данных и т.п., отдельно или в комбинации.
Если способы настоящего изобретения реализованы в программном обеспечении, может быть предусмотрен машиночитаемый носитель данных, сохраняющий одну или более программ (программных модулей). Одна или более программ, сохраненных на машиночитаемом носителе данных, выполнены с возможностью их выполнения посредством одного или более процессоров в электронном устройстве (выполнены с возможностью выполнения). Одна или более программ включают в себя инструкции, которые предписывают электронному устройству осуществлять способы согласно вариантам осуществления, описанным в формуле изобретения или в подробном описании настоящего изобретения.
Эта программа (программный модуль, программное обеспечение) может сохраняться в энергонезависимом запоминающем устройстве, включающем в себя оперативное запоминающее устройство и флэш-память, постоянное запоминающее устройство (ROM), электрически стираемое программируемое постоянное запоминающее устройство (EEPROM), устройство хранения данных на магнитных дисках, постоянное запоминающее устройство на компакт-дисках (CD-ROM), универсальные цифровые диски (DVD) либо другие оптические устройства хранения данных и магнитную кассету. В качестве альтернативы, запоминающее устройство может сохраняться в запоминающем устройстве, сконфигурированном посредством комбинации части или всего из означенного. Помимо этого, каждое конфигурационное запоминающее устройство может включаться во множество запоминающих устройств.
Помимо этого, программы могут сохраняться в подключаемом устройстве хранения данных, к которому могут осуществляться доступ через сеть связи, к примеру, через Интернет, сеть intranet, локальную вычислительную сеть (LAN), широкополосную LAN (WLAN) или SAN (сеть хранения данных), либо через комбинацию означенного. Такое устройство хранения данных может осуществлять доступ к устройству, которое выполняет варианты осуществления настоящего изобретения, через внешний порт. Помимо этого, отдельное устройство хранения данных в сети связи может осуществлять доступ к устройству, которое выполняет варианты осуществления настоящего изобретения.
Ниже в этом документе в качестве примера описан способ установки дорожной инфраструктуры на дороге. Более конкретно, в нижеприведенном описании, структура представляет собой структуру по фиг. 2, 23 и 34 и относится к структуре и способу установки структуры настоящего изобретения.
Ниже в данном документе подробно описаны варианты осуществления настоящего изобретения с обращением к фиг. 41-49, иллюстрирующие варианты осуществления настоящего изобретения.
Согласно варианту осуществления настоящего изобретения, структура 4100, которая представляет собой основной компонент конструктивной структуры для установки дорожных инфраструктурных датчиков настоящего изобретения, включает в себя: вертикальную раму 4110, посаженную на дороге или на краю дороги; и горизонтальную раму 4120, установленную в направлении ширины дороги на верхнем участке вертикальной рамы 4110, и, например, может представлять собой структуру в форме «ㄱ» дорожного фонаря либо в форме «ㄷ» установки на общей осветительной пластине, либо структуру HYPASS IC, и может быть предусмотрена любая структура, если горизонтальная рама 4120 расположена на верхнем участке дороги, и блок 4200 звуковых датчиков, который подробно описан ниже, может устанавливаться под горизонтальной рамой 4120 и располагаться на верхнем участке дороги. Как описано выше, положение блока звуковых датчиков настоящего изобретения является иллюстративным и не ограничено положением, проиллюстрированным в настоящем описании.
Согласно варианту осуществления настоящего изобретения, блок 4200 звуковых датчиков, который представляет собой основной компонент конструктивной структуры для установки дорожных инфраструктурных датчиков настоящего изобретения, устанавливается под горизонтальной рамой 4120 структуры 4100, устанавливается таким образом, что он расположен на верхнем участке дороги, излучает звуковой сигнал на поверхность дороги для дороги, принимает звуки, отражаемые от поверхности дороги для дороги, и формирует звуковую информацию и передает принимаемую звуковую информацию в контроллер 4300, который подробно описан ниже, так что звуковая информация преобразуется в частоту, и состояние поверхности дороги может идентифицироваться посредством контроллера 4300.
Блок 4200 звуковых датчиков настоящего изобретения может включать в себя передающее устройство, которое передает звуковые сигналы на поверхность дороги для дороги, принимает отраженные звуковые сигналы и выводит передаваемые сигналы под управлением контроллера 4300, и приемное устройство, которое принимает отраженные сигналы, отражаемые от поверхности дороги для дороги.
Передающее устройство и приемное устройство расположены таким образом, что звуки передаются и отражаются в форме прямой линии, и звуковой датчика 4240, который описан ниже, представляется как сконфигурированный в состоянии, в котором передающее устройство и приемное устройство интегрируются.
Между тем, в способе с использованием звуков для того, чтобы идентифицировать состояние поверхности дороги, поскольку передающее устройство и приемное устройство фиксированно устанавливаются под определенным углом, состояние только самой узкой зоны поверхности дороги идентифицируется, и в настоящем описании, другой вариант осуществления блока 4200 звуковых датчиков, включающего в себя множество блоков 4200 звуковых датчиков и первый приемо-передающий элемент 4250 и второй приемо-передающий элемент 4260, которые могут взаимно принимать отраженные звуковые сигналы, так что состояние дороги может оцениваться с высокой надежностью.
В частности, блок 4200 звуковых датчиков по варианту осуществления устанавливается под горизонтальной рамой 4120 структуры 4100, и множество дороги могут устанавливаться в направлении ширины, так что способность идентифицировать надежность состояния поверхности дороги может улучшаться.
В этом случае, множество блоков 4200 датчиков, установленных в одном варианте осуществления, отличается тем, что время передачи звуков задается таким образом, что время поступления звуков, излучаемых и отражаемых от поверхности дороги, является абсолютно одинаковым, и это должно обеспечивать возможность быстрого достижения идентификации состояния поверхности дороги посредством задания времени передачи звуков таким образом, что характеристики звуков в нормальном состоянии поверхности дороги, которое представляет собой начальный стандарт, могут относительно аналогично извлекаться и сравниваться.
Помимо этого, причина задания времени передачи звуков таким образом, что время поступления является равным, заключается в том, что, когда звуки формируют звуковую информацию с использованием времени передачи и времени поступления, поскольку скорость звуков является одинаковой, когда установлено множество блоков 4200 звуковых датчиков одинакового оборудования, время поступления звуков, отражаемых от поверхности дороги, отличается, если время передачи является равным, посредством переменной на основе высоты поверхности дороги, так что звуковая информация, сформированная посредством каждого из блоков 4200 звуковых датчиков, должна анализироваться, но для того, чтобы легко формировать звуковую информацию даже со временем поступления звуков, когда время передачи звуков каждого из блоков 4200 звуковых датчиков регулируется таким образом, что время поступления звуков является равным, согласно переменной на основе высоты поверхности дороги, быстро определяется разность в звуковой информации, имеющей различное время поступления, так что может с легкостью обеспечиваться идентификация состояния поверхности дороги.
Например, когда время передачи звуков множества блоков 4200 звуковых датчиков согласно высоте поверхности дороги задается таким образом, что время поступления является равным, когда поверхность дороги находится в общем состоянии, время поступления звуков является равным, и когда состояние поверхности дороги представляет собой такое состояние, как повреждение или гололед, время поступления звуков отличается от заданного времени поступления звуков, так что идентификация состояния всей поверхности дороги может легко достигаться, но когда некоторые блоки 4200 звуковых датчиков отличаются от заданного времени поступления звуков, можно быстрее проверять то, что некоторые состояния всей поверхности дороги отличаются.
Помимо этого, множество блоков 4200 звуковых датчиков по одному варианту осуществления отличаются тем, что когда время, когда звуки передаются из любого блока 4200 звуковых датчиков и отражаются от поверхности дороги и возвращаются, т.е. период пролета звуков составляет t, n датчиков последовательно передают звуки на поверхность дороги n раз или более в сумме и принимают отраженные звуки в течение оставшихся t/2 часов, так что информация поверхности дороги или информация объема движения дискретизируется n раз или более в заданном периоде.
Иными словами, блок 4200 звуковых датчиков по одному варианту осуществления реализует преимущество дискретизации и формирования звуковой информации, такой как информация поверхности дороги и информация объема движения, посредством использования множества блоков 4200 звуковых датчиков, так что состояние поверхности дороги может более надежно достигаться. В этом случае, должно быть очевидным то, что блок 4200 звуковых датчиков по другому варианту осуществления, который подробно описан ниже, также дискретизирует и формирует звуковую информацию, такую как информация поверхности дороги и информация дорожного движения, через звуки.
Помимо этого, блок 4200 звуковых датчиков по одному варианту осуществления включает в себя соединительный узел 4210, верхний участок которой соединён с нижним участком горизонтальной рамы 4120 структуры 4100, соединительный стержень 4220, верхний участок которого шарнирно соединён с нижним участком соединительного узла 4210 таким образом, что он может вращаться в направлениях спереди назад и слева направо, основной корпус 4230, соединенный с нижним концом соединительного стержня 4220, и звуковой датчик 4240, установленный в нижнем участке основного корпуса 4230. В этом случае, направление спереди назад означает продольное направление дороги, направление слева направо означает направление ширины дороги, и направления спереди назад и слева направо (поперечное направление), упомянутые ниже, также означают такое направление.
Соединительный узел 4210 включает в себя нижнюю канавку 4212 для размещения, сформированную в нижнем участке, и шариковый подшипник, установленный в нижней канавке 4212 для размещения, и соединительный стержень 4220 включает в себя верхнюю сферу 4224, вставленную и соединенную с внутренней стороной нижней канавки 4212 для размещения соединительного узла (4210) в верхнем конце таким образом, что он соединён в форме шарового шарнира с возможностью вращения в направлениях вперед и назад и влево и вправо.
В этом случае, должно быть очевидным то, что нижняя канавка 4212 для размещения имеет форму, соответствующую верхней сфере 4224 соединительного стержня 4220, и соединительный стержень 4220 соединён с нижним участком соединительного узла 4210 в шаровой шарнирной структуре таким образом, что он является вращающимся в направлениях вперед и назад и влево и вправо, так что предотвращается сотрясение, когда в структуре 4100 формируются вибрации вследствие движения транспортных средств и внешних вибраций.
Иными словами, основной корпус 4230, соединенный с нижним концом соединительного стержня 4220, и звуковой датчик 4240, установленный в нижнем участке основного корпуса 4230, могут предотвращать сотрясение соединительного стержня 4220 вместе, чтобы стабильно излучать звуки, излучаемые на поверхность дороги, заданную посредством звукового датчика 4240.
Основной корпус 4230 позволяет звуковому датчику 4200 по временному примеру и звуковому датчику 4200 по другому варианту осуществления, которые подробно описаны ниже, устойчиво устанавливаться и соединяться с контроллером 4300, который подробно описан ниже, с возможностью управления посредством контроллера 4300, и звуковой датчик 4240 формирует звуковую информацию посредством излучения звуков на поверхность дороги и затем приема отраженных звуков и передает сформированную звуковую информацию в контроллер 4300, как описано выше.
Затем, блок 4200 звуковых датчиков по другому варианту осуществления включает в себя первый приемо-передающий элемент 4250, установленный на одной стороне нижнего участка горизонтальной рамы 4120 структуры 4100 с возможностью излучения или приёма звуков на поверхности дороги или из неё, и второй приемо-передающий элемент 4260, установленный на другой стороне нижнего участка горизонтальной рамы 4120 структуры 4100 с возможностью излучения или приёма звуков на поверхности дороги или из неё.
В этом случае, первый приемо-передающий элемент 4250 устанавливается под углом, допускающим прием звуков, излучаемых и отражаемых от второго приемо-передающего элемента 4260 на дорогу, и второй приемо-передающий элемент 4260 устанавливается под углом, допускающим прием звуков, излучаемых и отражаемых от первого приемо-передающего элемента 4250 на дорогу.
Другими словами, блок 4200 звуковых датчиков согласно другому варианту осуществления обеспечивает возможность любому из первого приемо-передающего элемента 4250 или второго приемо-передающего элемента 4260, передавать звуки на поверхность дороги и принимать отраженные звуки посредством второго приемо-передающего элемента 4260 или первого приемо-передающего элемента 4250, за счет этого реализуя преимущество плавного выяснения состояния поверхности дороги посредством использования другого блока передачи звуков, когда блок передачи звуков любого из первого приемо-передающего элемента 4250 или второго приемо-передающего элемента 4260 сбоит.
Помимо этого, блок 4200 звуковых датчиков согласно другому варианту осуществления регулирует угол любого из первого приемо-передающего элемента 4250 и обеспечивает возможность перемещения второго приемо-передающего элемента 4260 или первого приемо-передающего элемента 4250 таким образом, чтобы принимать звуки согласно отрегулированному углу, за счет этого выясняя состояние поверхности дороги в большей степени, чем в предшествующем уровне техники.
Подробнее, в первом варианте осуществления для другого варианта осуществления, горизонтальная рама 4120 структуры 4100 для установки блока 4200 звуковых датчиков включает в себя первый рельс 4122, установленный в продольном направлении перед нижним участком, и вращательный мотор 4126, соединенный с первым рельсом 4122 и управляемый посредством контроллера 4300 для вращения первого рельса 4122.
В первом варианте осуществления для другого варианта осуществления, блок 4200 звуковых датчиков, т.е. первый приемо-передающий элемент 4250 и второй приемо-передающий элемент 4260, устанавливаются на одной стороне и на другой стороне первого рельса 4122 и перемещаются в противоположных направлениях согласно вращению первого рельса 4122, соединительный стержень 4220, соединенный с нижним участком соединительного стержня 4220 таким образом, что верхний участок является вращающимся в направлениях вперед и назад, и влево, основной корпус 4230, соединенный с нижним концом соединительного стержня 4220, приводной мотор 4270, установленный в нижнем участке основного корпуса 4230 и управляемый посредством контроллера 4300, и звуковой датчик 4240, установленный в нижнем участке приводного мотора 4270 и вращающийся в направлении ширины дороги посредством приводного мотора 4270 с возможностью регулирования угла.
Другими словами, блок звуковых датчиков 4220 согласно первому варианту осуществления для другого варианта осуществления принимает звуки зоны поверхности дороги, заданной первоначально, и регулирует угол и положение в направлении ширины дороги первого приемо-передающего элемента 4250 и второго приемо-передающего элемента 4260 посредством контроллера 4300, за счет этого принимая звуки зоны поверхности дороги, отличной от зоны поверхности дороги, заданной первоначально, за счет этого выясняя состояние поверхности дороги в большей степени, чем в предшествующем уровне техники, в силу этого повышая надежность выяснения состояния поверхности дороги.
В этом случае, соединённое состояние между первым рельсом 4122 и соединительным узлом 4210 обеспечивается в направлении резьбы по-другому по сравнению с одной стороной первого рельса 4122 на внешней периферии другой стороны, и одна сторона первого рельса 4122 и другая сторона соединительного узла 4210 проникают и соединяются винтами между собой таким образом, что соединительный узел 4210 перемещается в поперечном направлении, т.е. в одном боковом или в другом боковом направлении, вдоль первого рельса 4122, вращающегося посредством вращательного мотора 4126, и пара соединительных узлов 4210 перемещается в противоположном направлении вдоль резьбы, сформированной на внешней периферии обеих сторон первого рельса 4122.
Помимо этого, подробнее, во втором варианте осуществления для другого варианта осуществления, горизонтальная рама 4120 структуры 4100 для установки блока 4200 звуковых датчиков включает в себя первый рельс 4122, установленный в продольном направлении перед нижним участком, второй рельс 4124, установленный в продольном направлении в задней части нижнего участка, и вращательный мотор 4126, соединенный с первым рельсом 4122 и вторым рельсом 4124, соответственно, и управляемый посредством контроллера 4300, который подробно описан ниже, с возможностью вращения первого рельса 4122 и второго рельса 4124.
Блок (4200) звуковых датчиков по варианту 2 осуществления для другого варианта осуществления, т.е. первый приемо-передающий элемент (4250) и второй приемо-передающей элемент (4260), включает в себя соединительный узел 4210, которая устанавливается в любом из первого рельса 4122 или второго рельса 4124, таким образом, что перемещается согласно вращению первого рельса 4122 или второго рельса 4124; основной корпус 4230, установленный под соединительным узлом 4210; приводной мотор 4270, управляемый контроллером 4300; звуковой датчик 4240, установленный под приводным мотором 4270 и вращающийся в направлении ширины дороги посредством приводного мотора 4270 с возможностью регулирования угла.
Другими словами, блок 4200 звуковых датчиков по второму варианту осуществления для другого варианта осуществления выполнен с возможностью приёма звуков зоны поверхности дороги для первой заданной дороги и регулирования угла и положения в направлении ширины дороги первого приемо-передающего элемента 4250 и второго приемо-передающего элемента 4260 посредством контроллера 4300 таким образом, чтобы принимать звуки других зон поверхности дороги, отличных от зоны поверхности дороги для первой заданной дороги, и в силу этого достигать преимущества повышения надежности выяснения состояния поверхности дороги посредством идентификации более широкого диапазона условий на поверхности дороги, чем традиционно.
В этом случае, соединённое состояние между первым рельсом 4122 и вторым рельсом 4124 и соединительным узлом 4210 обеспечивается с резьбой на внешней периферии первого рельса 4122 и второго рельса 4124, и первый рельс 4122 и второй рельс 4124 навинчиваются на резьбу и соединяются с соединительным узлом 4210 таким образом, что соединительный узел 4210 перемещается в поперечном направлении, т.е. в одну сторону или в другую сторону, вдоль первого рельса 4122 и второго рельса 4124, которые вращаются посредством вращательного мотора 4126.
Помимо этого, соединённое состояние между приводным мотором 4270 и звуковым датчиком 4240 по варианту 1 осуществления и по варианту 2 осуществления для другого варианта осуществления является таким, что приводной мотор 4270 и звуковой датчик 4240, вращающиеся влево и вправо согласно операции, соединяются через коробку 4280 передач, и приводной мотор 4270 управляется посредством контроллера 4300, который подробно описан ниже, таким образом, что регулируется угол установки звукового датчика 4240.
Помимо этого, первый приемо-передающий элемент 4250 и второй приемо-передающий элемент 4260 по варианту 1 осуществления и по варианту 2 осуществления для других вариантов осуществления могут включать в себя соединительный стержень 4220, шарнирно соединенный с возможностью вращения с соединительным узлом 4210 в направлениях вперед и назад и влево, аналогично блоку 4200 звуковых датчиков по вышеописанному варианту осуществления.
Подробнее, первый приемо-передающий элемент 4250 и второй приемо-передающий элемент 4260 по варианту 1 осуществления и по варианту 2 осуществления для других вариантов осуществления выполнены с возможностью включать в себя соединительный стержень 4220, верхний участок которого соединяется с нижним участком соединительного узла 4210 таким образом, что он вращается в направлениях спереди назад и слева направо, и основной корпус 4230 первого приемо-передающего элемента 4250 и второго приемо-передающего элемента 4260 соединён с нижним концом соединительного стержня 4220 таким образом, что соединительный узел 4210, соединительный стержень 4220 и основной корпус блока 4200 звуковых датчиков по одному варианту осуществления имеют одинаковую структуру. В этом случае, соединительный узел 4210 и соединительный стержень 4220 выполнены с возможностью быть одинаковыми с конфигурацией блока 4200 звуковых датчиков предыдущего варианта осуществления.
Иными словами, когда вибрация формируется в структуре 4100 посредством соединительного стержня 4220, блока 4200 звуковых датчиков, т.е. первого приемо-передающего элемента 4250 и второго приемо-передающего элемента 4260 по вариантам 1 и 2 осуществления для других вариантов осуществления, предотвращается сотрясение соединительного стержня 4220, основного корпуса и звукового датчика 4240, так что может более стабильно выполняться излучение и прием звуков.
Помимо этого, основной корпус 4230 по вариантам 1 и 2 осуществления для других вариантов осуществления включает в себя верхнюю канавку 4234 для размещения, сформированную в верхнем участке, и шариковый подшипник, установленный в верхней канавке 4234 для размещения, и соединительный стержень 4220 может включать в себя нижнюю сферу 4226, вставленную и соединенную с внутренней стороной верхней канавки 4234 для размещения основного корпуса 4230 в нижнем конце, и, соответственно, основной корпус 4230 соединён с соединительным стержнем 4220 в форме шарового шарнира таким образом, что он вращается в направлениях спереди назад и слева направо, чтобы предотвратить вторичное сотрясение, так что передача и прием звуков может более стабильно выполняться из звукового датчика 4240.
Помимо этого, соединительный стержень 4220 по вариантам 1 и 2 осуществления для других вариантов осуществления включает в себя защитный элемент 4222, который соединён с верхней внешней периферией и соединён с внешней периферией соединительного стержня 4220 таким образом, что он проходит через центр, и расположен в верхнем участке звукового датчика 4240 и имеет круглую форму искривленной поверхности, выпуклой по отношению к верхнему участку, так что открывается нижний участок, и отражающий слой 4222a, допускающий отражение звуков, образуется на внутренней поверхности.
Иными словами, защитный элемент 4222 соединён с соединительным стержнем 4220 через свой центр и соединён с возможностью размещения в верхнем участке звукового датчика 4240 таким образом, что сигнал звуков, отражаемых от поверхности дороги, может отражаться и приниматься посредством отражающего слоя 4222, даже если сигнал звуков не принимается непосредственно посредством звукового датчика 4240, так что максимально возможное количество звуковых сигналов может приниматься.
Это позволяет достигать преимущества приема стольких же звуков, нормально перемещающихся прямо в линии видимости, за счет этого повышая надежность измерения посредством звуков, и как результат, надежность понимания состояния поверхности дороги может повышаться.
Помимо этого, защитный элемент 4222 может защищать верхний участок звукового датчика 4240 таким образом, что звуковой датчик 4240 может минимизировать повреждение, вызываемое посредством ультрафиолетовых лучей или дождевой воды, или приема звуков, или посредством экскрементов птицы.
В этом случае, поскольку защитный элемент 4222 включается, основной корпус 4230 включает в себя множество вспомогательных приемных датчиков 4232, установленных в верхнем участке, и вспомогательные приемные датчики 4232 могут реализовывать эффект приема отраженных звуков более стабильно, поскольку звуки, отражаемые посредством отражающего слоя 4222, с трудом принимаются посредством основного корпуса 4230, расположенного в верхнем участке звукового датчика 4240.
Помимо этого, вращательный мотор 4126 по вариантам 1 и 2 осуществления по вариантам 1 и 2 осуществления для других вариантов осуществления имеет вращающийся стержень, соединенный с первым рельсом 422 и вторым рельсом 4124, и верхний участок фиксированно соединён с нижним участком горизонтальной рамы 4120.
Между тем, блок 4200 звуковых датчиков, согласно варианту осуществления, отличающемуся от настоящего изобретения, отличается тем, что когда звук излучается на поверхность дороги для дороги, частота звука излучается по-разному для каждого заданного времени через контроллер 4300, и это обеспечивает формирование звуковой информации, которая обеспечивает возможность более подробного определения состояния поверхности дороги через различные частоты, за счет этого достигая преимущества выяснения состояния поверхности дороги, которое является более надежным.
Например, блок 4200 звуковых датчиков, согласно варианту осуществления, отличающемуся от настоящего изобретения, выделяет 40 кГц звука на поверхность дороги в нормальное время, когда звук достигает заданного времени, 80 кГц звука излучается на поверхность дороги посредством контроллера 4300, и когда звук достигает заданного времени, 120 кГц звука излучается на поверхность дороги посредством контроллера 4300, за счет этого формируя звуковую информацию, которая обеспечивает возможность определения подробного состояния поверхности дороги.
Иными словами, блок 4200 звуковых датчиков, согласно варианту осуществления, отличающемуся от настоящего изобретения, отличается тем, что когда звук излучается на поверхность дороги для дороги, частота звука излучается по-разному для каждого заданного времени, и посредством излучения звука в течение заданных n раз, состояние поверхности дороги выясняется подробнее, за счет этого реализуя преимущество дополнительного повышения надежности выяснения состояния поверхности дороги.
Контроллер 4300, который представляет собой основной компонент конструктивной структуры для установки дорожных инфраструктурных датчиков настоящего изобретения, устанавливается в вертикальной раме 4110 структуры 4100, принимает звуковую информацию из блока 4200 звуковых датчиков и передает звуковую информацию на центральный сервер обслуживания и, в частности, извлекает характеристики звукового сигнала из звуковой информации, принимаемой из звукового датчика 4240, классифицирует звуковую информацию, чтобы выяснять состояние поверхности дороги, и затем оценивает состояние поверхности дороги и передает оцененное состояние поверхности дороги на центральный сервер обслуживания, за счет этого предпринимая меры для предотвращения аварий, вызванных текущим состоянием поверхности дороги.
Контроллер 4300 согласно настоящему изобретению не только управляет вышеописанным звуковым датчиком 4240, но также и автоматически управляет вращательным мотором 4126 и приводным мотором 4270 до заданного входного значения или управляет вращательным мотором 4126 и приводным мотором 4270 посредством входной информации центрального сервера обслуживания.
Помимо этого, контроллер 4300 согласно настоящему изобретению может включать в себя преобразователь сигналов, который выполняет преобразование частоты для заданной области в области звуковой информации, принимаемой из звукового датчика 4240, чтобы получать сигнал частотной области, искусственную нейронную сеть, которая извлекает характеристики входного сигнала на основе модели классификации поверхностей дороги, обученной посредством использования сигнала частотной области, в качестве входного сигнала, и классифицирует входной сигнал, чтобы оценивать состояние поверхности дороги, и управляет ими.
Иными словами, контроллер 4300 может включаться в распределительный щит или клеммную коробку и устанавливаться вместе в вертикальной раме 4110 структуры 4100 и может включать в себя блок проводной или беспроводной связи, чтобы передавать звуковую информацию на центральный сервер обслуживания.
Ниже подробно описан способ конструирования конструктивной структуры для установки дорожных инфраструктурных датчиков настоящего изобретения.
Способ конструирования конструктивной структуры для установки дорожных инфраструктурных датчиков настоящего изобретения выполнен с возможностью включать в себя этап 4S10 установки структуры, который устанавливает структуру 4100, этап 4S20 установки датчиков, который устанавливает блок 4200 звуковых датчиков на структуре 4100, и этап 4S30 установки клеммной коробки, который устанавливает контроллер 4300 на структуре 4100.
Этап 4S10 установки структуры устанавливает вертикальную раму 4110 на краю дороги или дороги и устанавливает структуру 4100, включающую в себя вертикальную раму 4110 и горизонтальную раму 4120, посредством соединения горизонтальной рамы 4120 с верхним участком вертикальной рамы 4110 в направлении ширины дороги.
В том случае, если структура 4100 имеет одинаковую форму «ᄀ» с уличным светильником, показанным на фиг. 41-44, описана установка упомянутым способа , если одинаковая форма с формой «ᄃ» структуры в форме рекламного щита, показанной на фиг. 45-48, устанавливается пара вертикальных рам 4110, и в силу этого устанавливается горизонтальная рама 4120, соединяющая верхний участок пары вертикальных рам 4110.
Помимо этого, должно быть очевидным то, что первый рельс 4122 и второй рельс 4124 устанавливаются под горизонтальной рамой 4120, когда блок 4200 звуковых датчиков по другим вариантам осуществления, описанным выше, устанавливается.
Между тем, этап 4910 установки структуры настоящего изобретения может быть исключён, поскольку ранее установлена такая структура 4100, как уличный светильник или структура в форме электрооптического щита.
Этап 4920 установки датчиков включает в себя установку блока 4200 звуковых датчиков, который принимает отраженные звуки после излучения звуков на поверхность дороги, на горизонтальной раме 4120 структуры 4100 после этапа 4910 установки структуры, и установку соединительного узла 4210 под горизонтальной рамой 4120 описал выше.
В этом случае, соединительный узел 4210 фиксированно соединён с нижним участком горизонтальной рамы 4120, когда установлен блок 4200 звуковых датчиков по варианту осуществления, и установлен с возможностью перемещения в первом рельсе 4122 и втором рельсе 4124, установленных под горизонтальной рамой 4120, когда установлен блок 4200 звуковых датчиков по другому варианту осуществления.
Соединительный узел 4210 включает в себя соединительный стержень 4220, соединенный с нижним участком, когда установлен блок 4200 звуковых датчиков по варианту осуществления, защитный элемент 4222, установленный на внешней периферии соединительного стержня 4220, основной корпус 4230, соединенный с нижним участком соединительного стержня 4220, множество вспомогательных приемных датчиков 4232, соединенных с верхним участком основного корпуса 4230, и звуковой датчик 4240, соединенный с нижним участком основного корпуса 4230. В качестве альтернативы, в случае если блок 4200 звуковых датчиков согласно другому варианту осуществления устанавливается, соединительный стержень 4220, соединенный с нижним участком; защитный элемент 4222, установленный на внешней периферии соединительного стержня 4220, основной корпус 4230, соединенный с нижним участком соединительного стержня 4220, множество вспомогательных приемных датчиков 4232, соединенных с верхним участком основного корпуса 4230, приводной мотор 4270, соединенный с нижним участком основного корпуса 4230, и звуковой датчик 4240, соединенный с нижним участком приводного мотора 4270, уже соединены.
Этап 4930 установки клеммной коробки представляет собой установку контроллера 4300, соединенного с вертикальной рамой 4110 структуры 4100 с блоком 4200 звуковых датчиков и соединенного с центральным сервером обслуживания проводным или беспроводным способом после этапа 4920 установки датчиков, и блок 4200 звуковых датчиков электрически соединяется таким образом, что блок 4200 звуковых датчиков может управляться посредством контроллера 4300.
В этом случае, этап 4930 установки клеммной коробки дополнительно может включать в себя этап задания начальной передачи для задания времени передачи звуков таким образом, что время поступления звуков, отражаемых и принимаемых посредством множества блоков 4200 звуковых датчиков, является абсолютно равным, когда установлен блок 4200 звуковых датчиков по одному варианту осуществления, либо этап задания начальной передачи для задания первого приемо-передающего элемента 4250 и второго приемо-передающего элемента 4260, которые первоначально устанавливаются, с возможностью приёма взаимно передаваемых звуков, когда установлен блок 4200 звуковых датчиков по другому варианту осуществления.
Как результат, конструктивная структура для установки системы дорожных инфраструктурных датчиков и способ ее конструирования по настоящему изобретению могут плавно распознавать состояние поверхности дороги без контакта через звук и могут повышать надежность оценки состояния поверхности дороги посредством распознавания состояния поверхности дороги посредством широкого диапазона измерений по сравнению с традиционным и могут повышать надежность измерений поверхности дороги посредством приема большого числа звуков через защитный элемент 4222, имеющий отражающий слой 4222a, который с трудом принимает даже небольшие возмущения вследствие характеристик звука, имеющего способность к прямолинейному движению, и посредством минимизации сотрясения блока 4200 звуковых датчиков через шаровую шарнирную структуру, когда структура 4100 вибрирует вследствие проезда транспортного средства или возмущений, и одновременной минимизации приема собственной частоты, сформированной посредством вибрации структуры 4100, через защитный элемент 4222, может получаться преимущество повышения надежности измерений посредством минимизации ошибки измерения.
В вышеописанных конкретных вариантах осуществления настоящего изобретения, компоненты, включенные в состав изобретения, выражаются в единственном или множественном числе согласно представленным конкретным вариантам осуществления. Тем не менее, выражения в единственном или множественном числе выбираются для того, чтобы удовлетворять ситуации, представленной для удобства пояснения, и настоящее изобретение не ограничено выражениями в единственном или множественном числе, и компоненты, выражаемые во множественном числе, могут компоноваться в единственном или множественном числе.
Между тем, варианты осуществления настоящего изобретения, раскрытые в этом описании изобретения и на чертежах, представляются просто для того, чтобы легко пояснять технический контент настоящего изобретения и помогать понимать настоящее изобретение, и не имеют намерение ограничивать объем настоящего изобретения. Иными словами, специалистам в данной области техники должно быть очевидным, что другие модификации на основе технической сущности настоящего изобретения могут осуществляться на практике. Помимо этого, каждый вариант осуществления, раскрытый в этом описании изобретения, может быть объединён и работать при необходимости. Например, части одного варианта осуществления, отличающегося от одного варианта осуществления настоящего изобретения, могут быть объединены и реализованы в форме варианта осуществления, не указанного в этом описании изобретения.
Между тем, порядок описания на чертежах, поясняющих способ настоящего изобретения, не обязательно соответствует порядку выполнения, и взаимосвязь между передней частью и задней частью может изменяться или выполняться параллельно.
В качестве альтернативы, на чертежах, описывающих способ настоящего изобретения, могут быть исключены некоторые компоненты и включены только некоторые компоненты в пределах объема, не выходя за рамки сущности настоящего изобретения.
Помимо этого, способ настоящего изобретения может быть реализован посредством объединения части или всего содержимого, включенного в каждый вариант осуществления, в пределах объема, не выходя за рамки сущности настоящего изобретения.
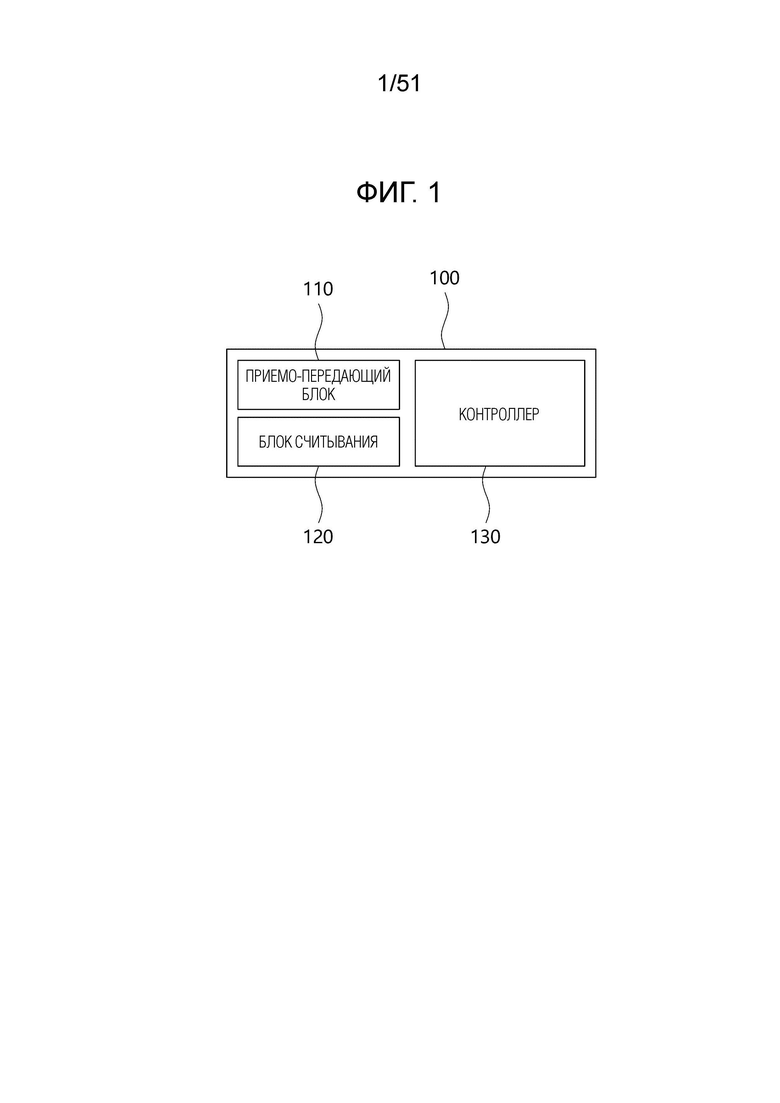
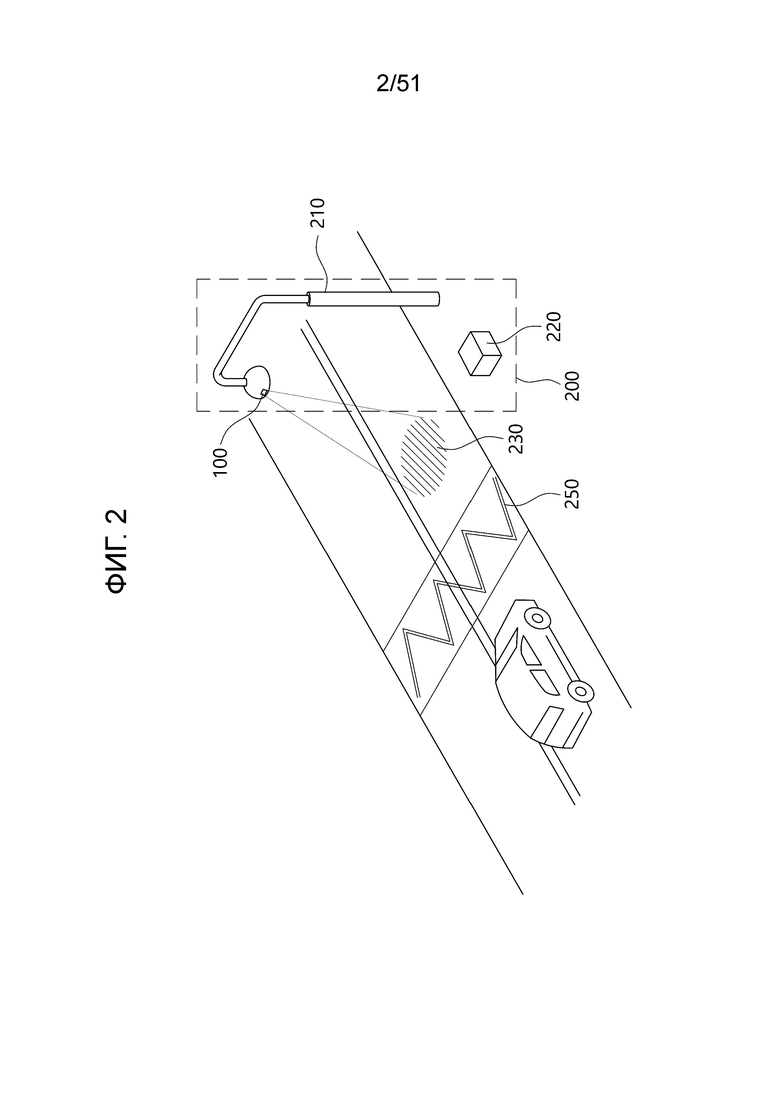
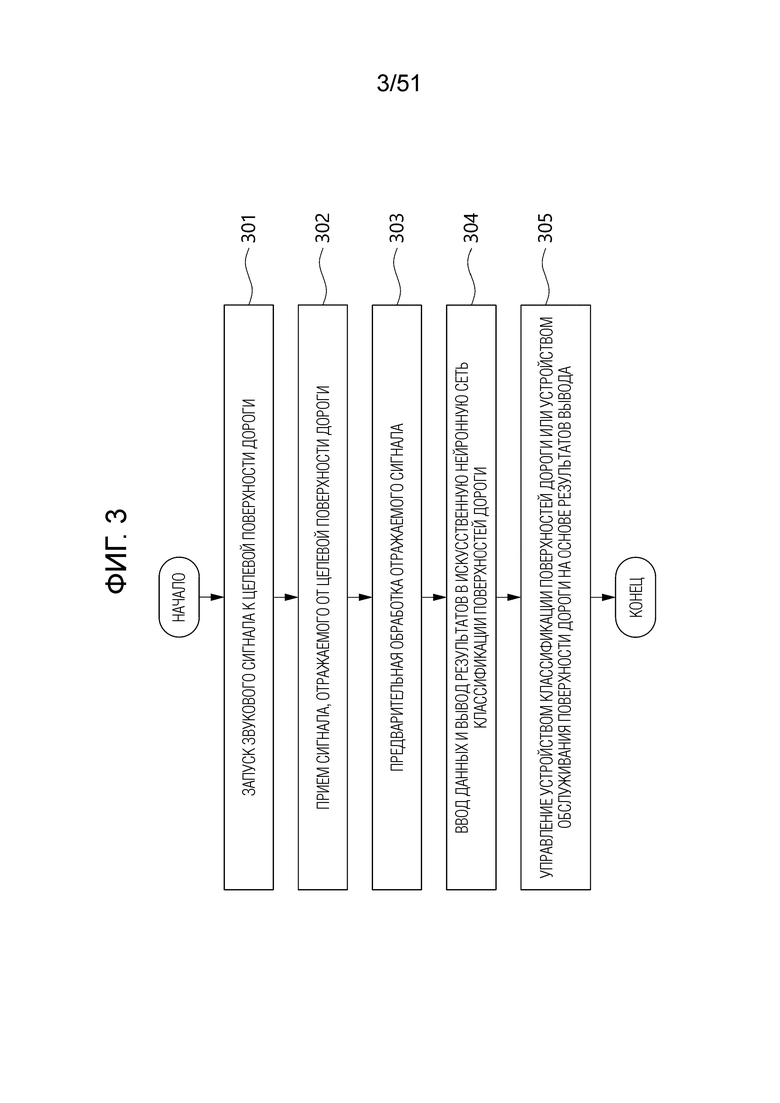
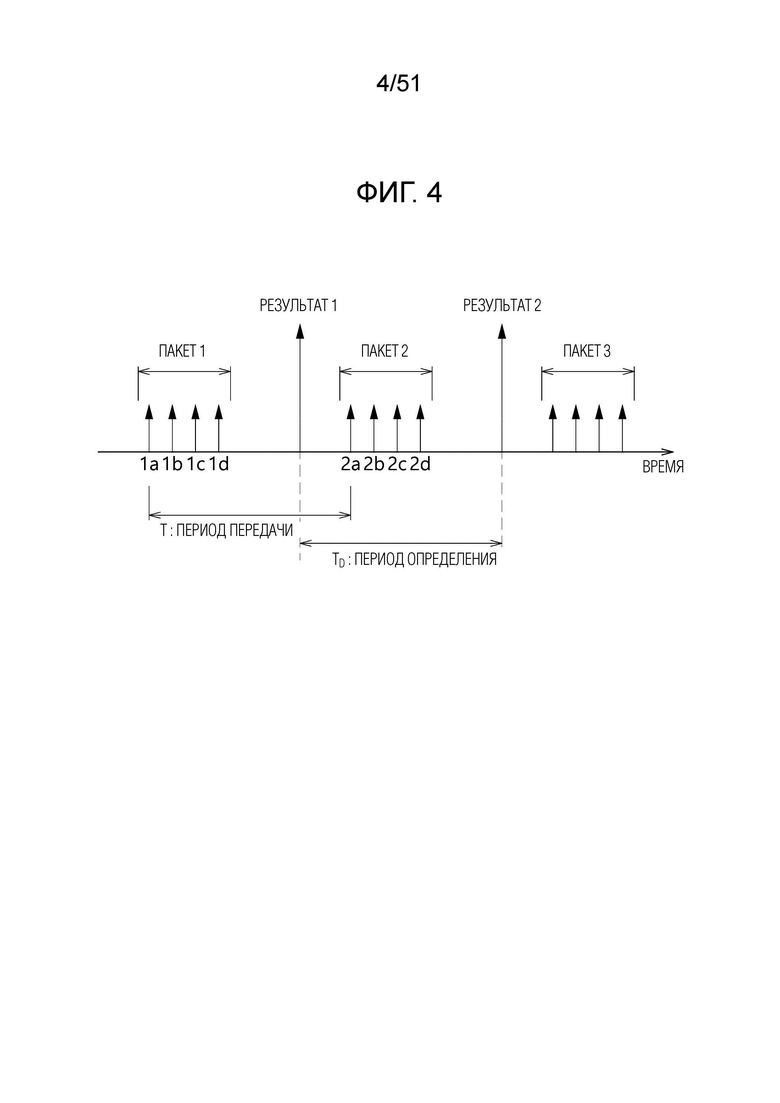
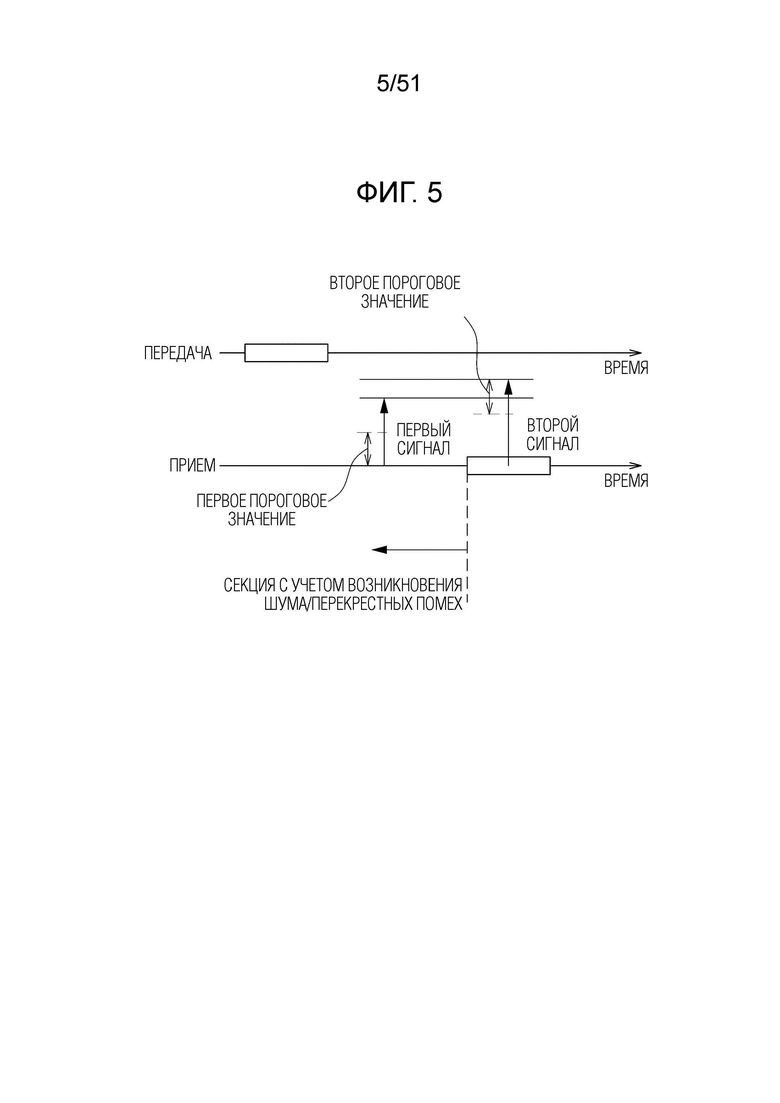
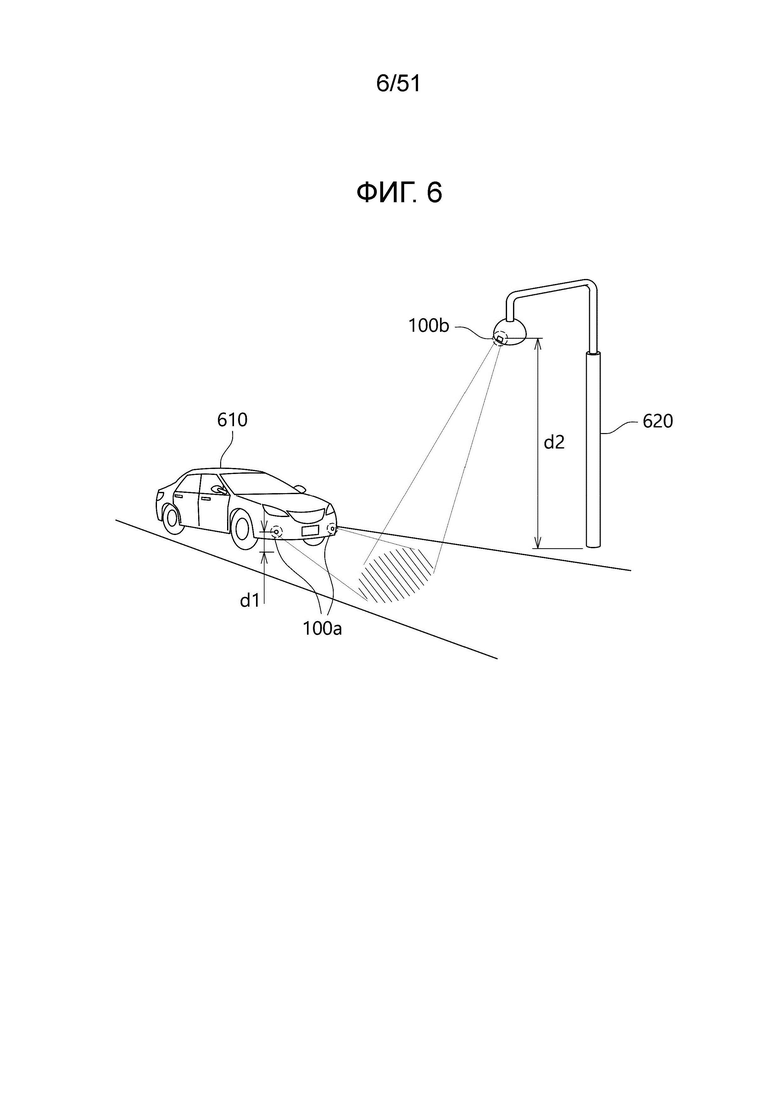
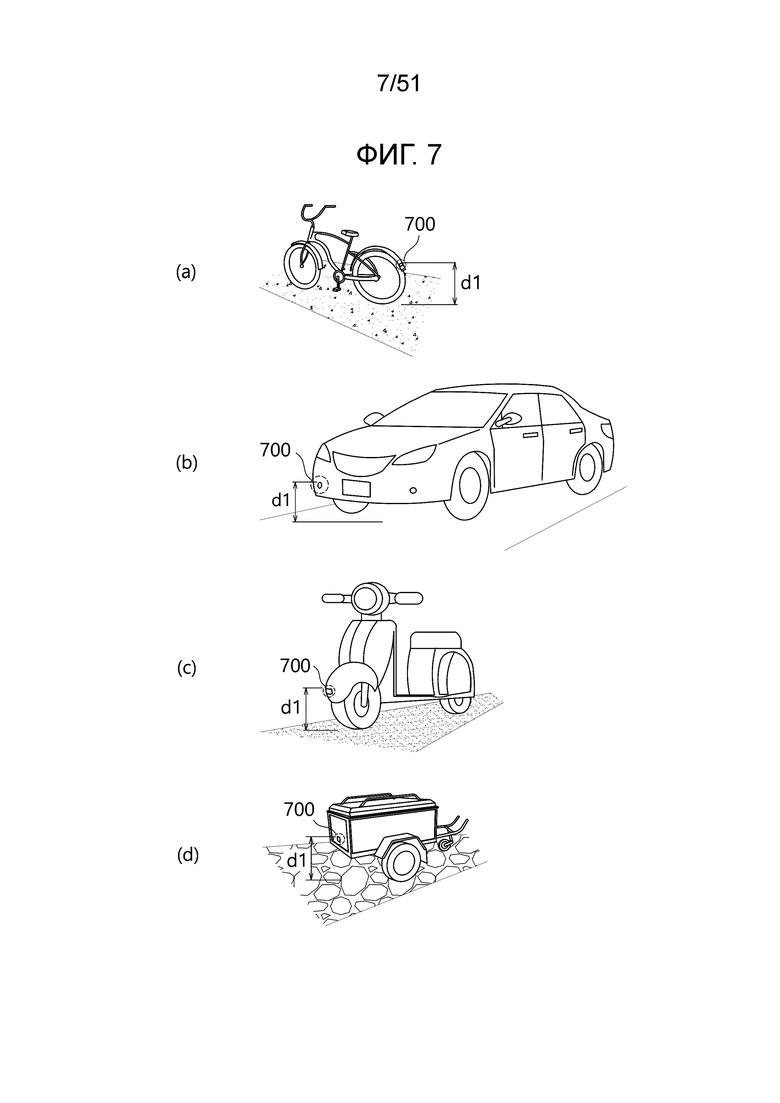
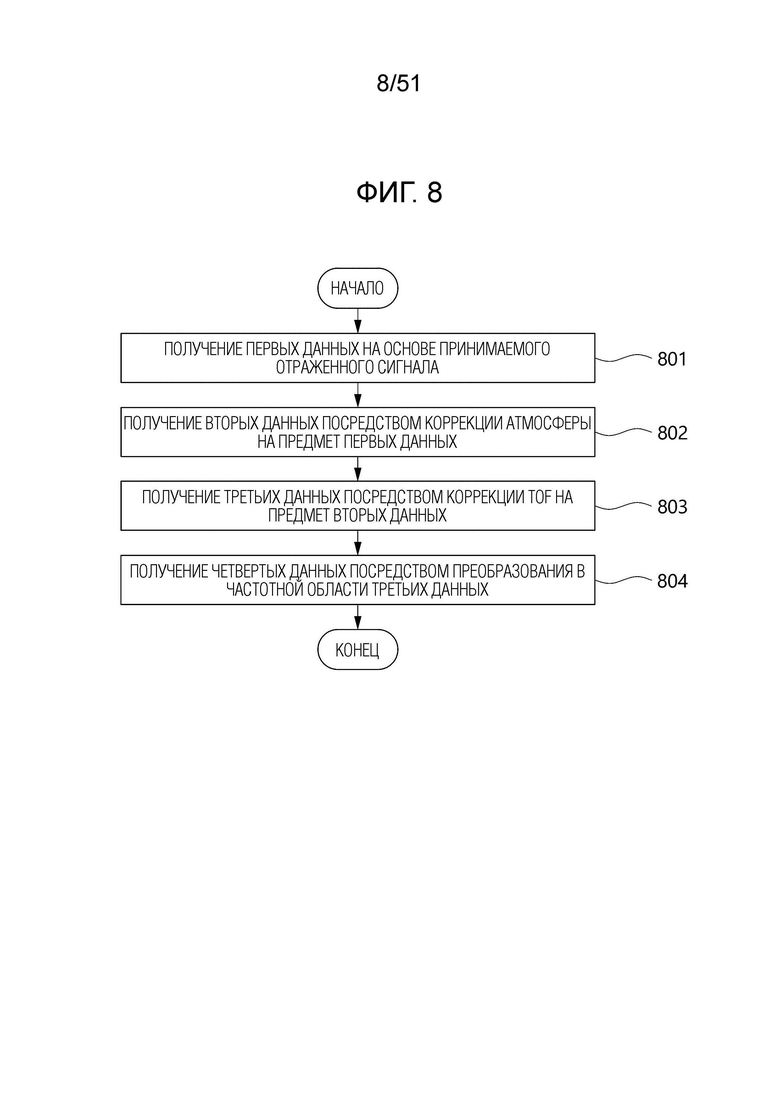
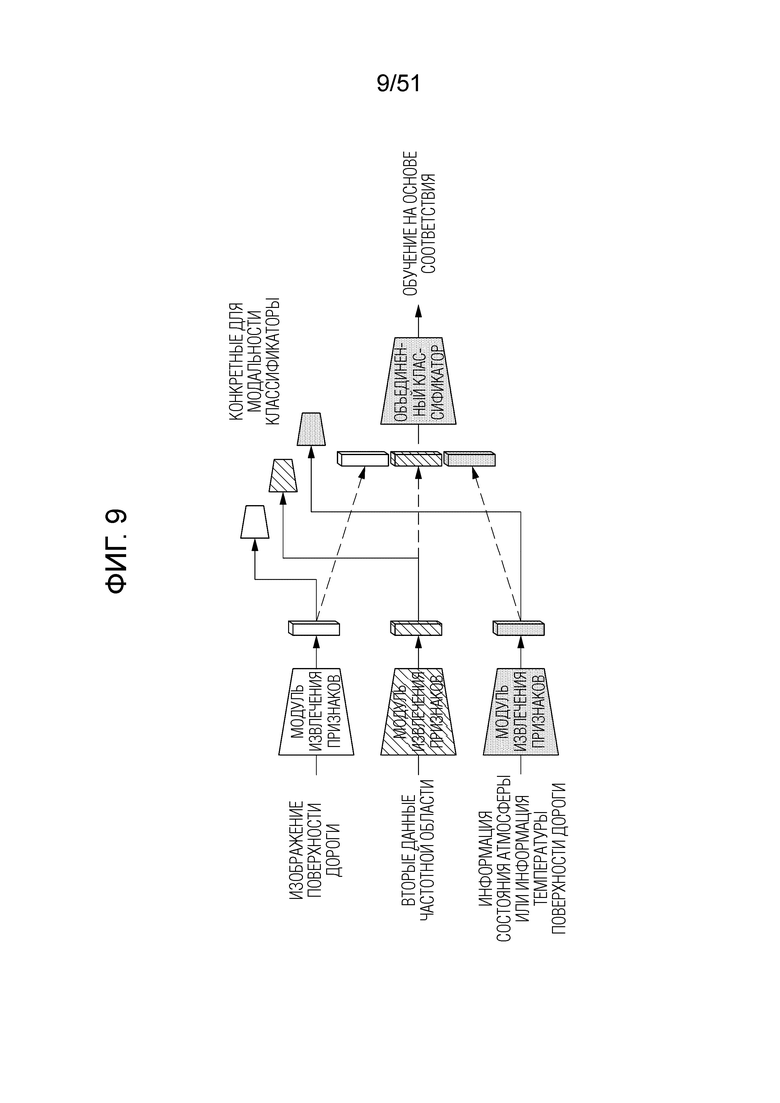
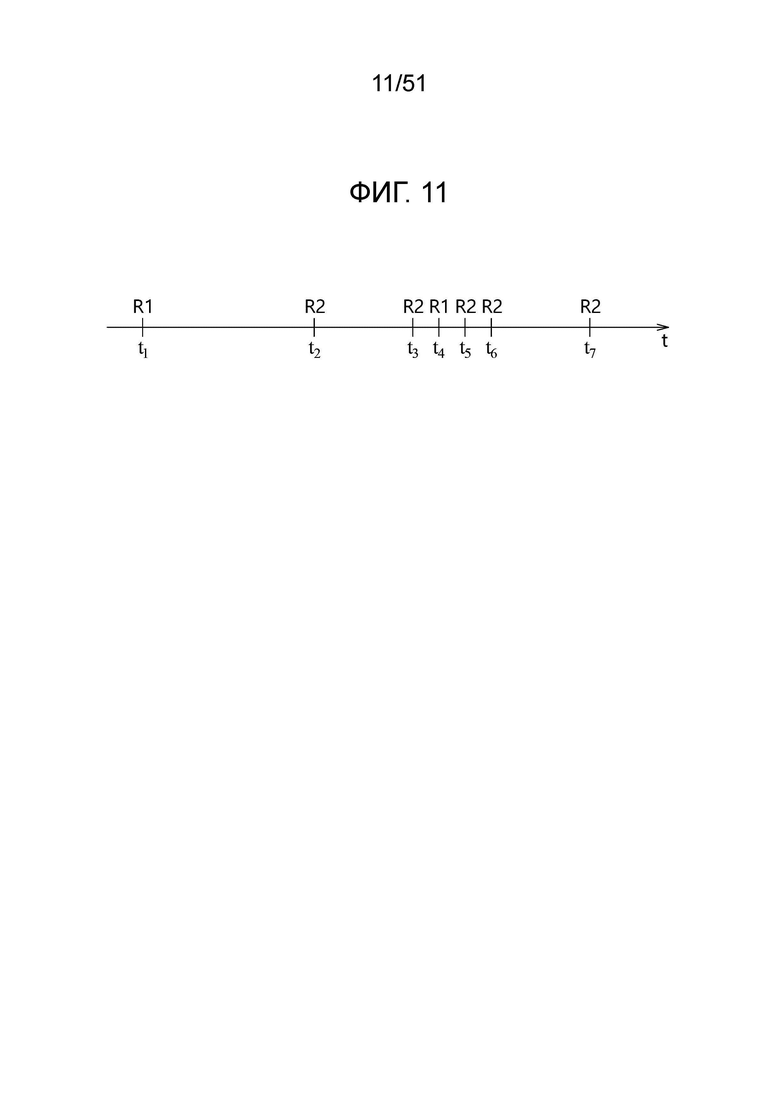
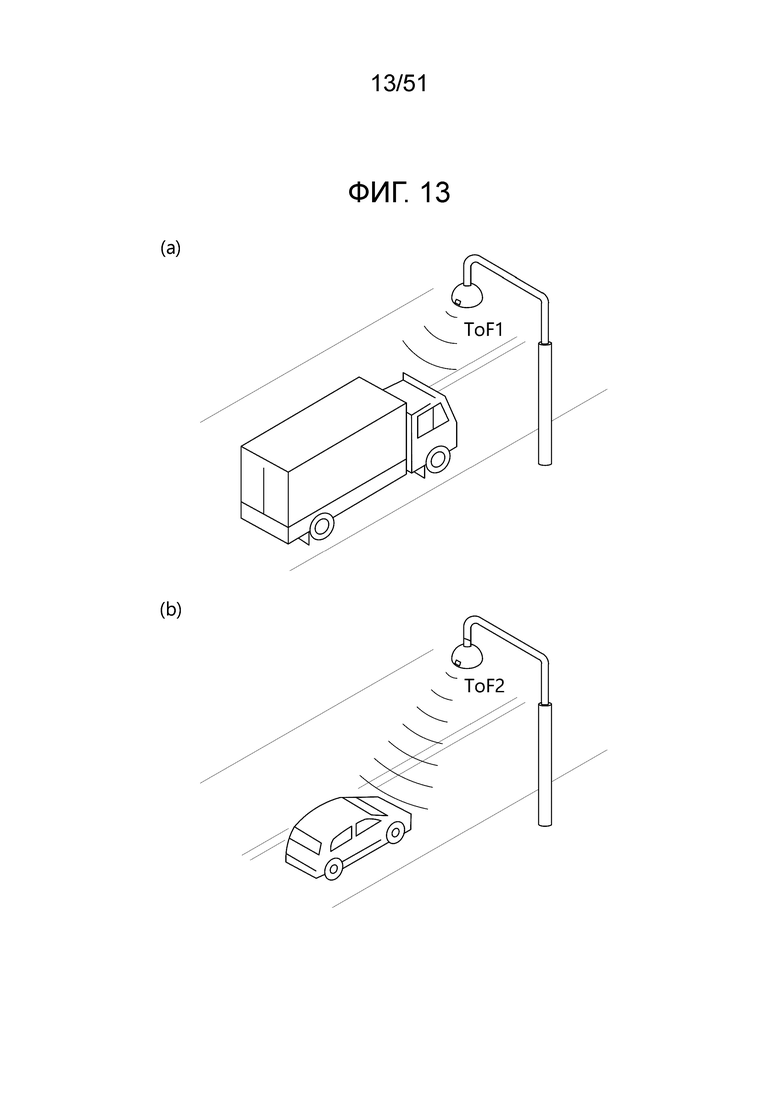
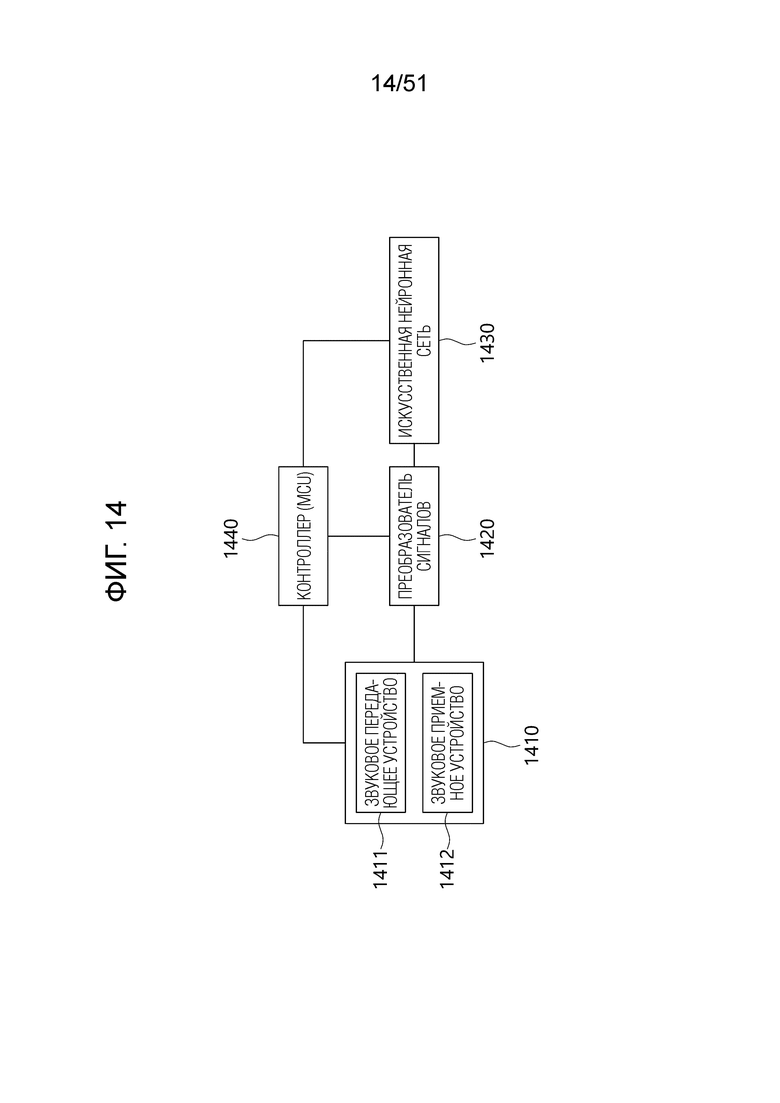
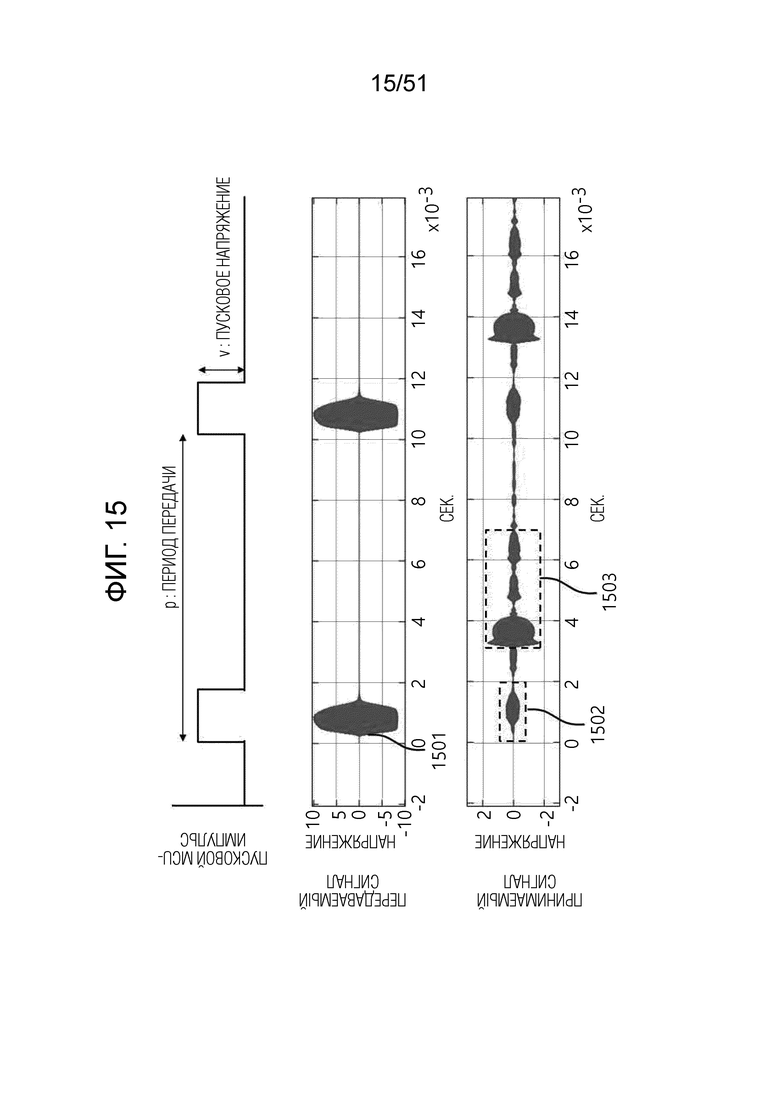
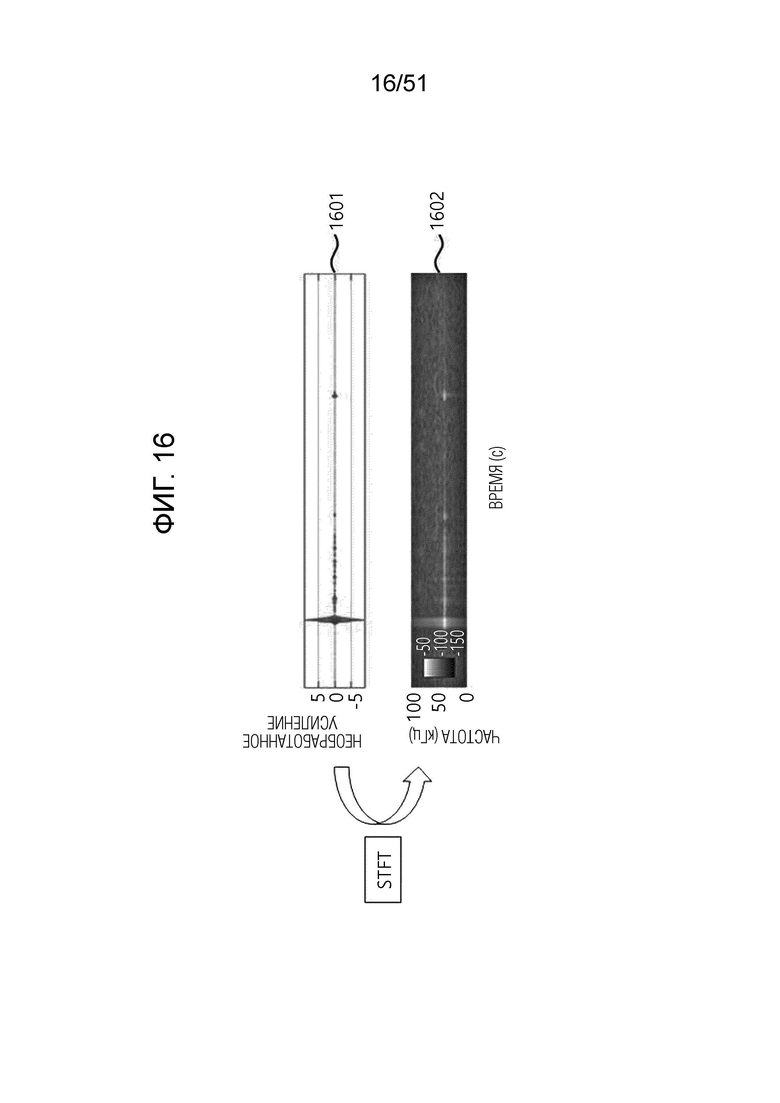
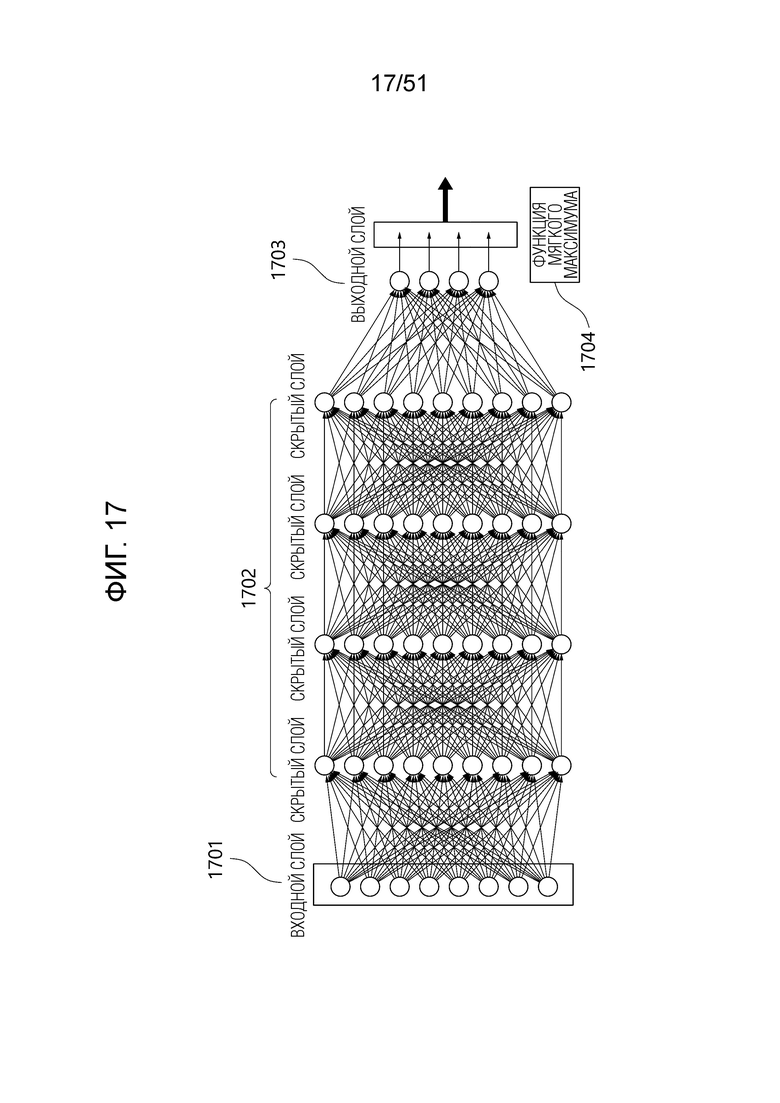
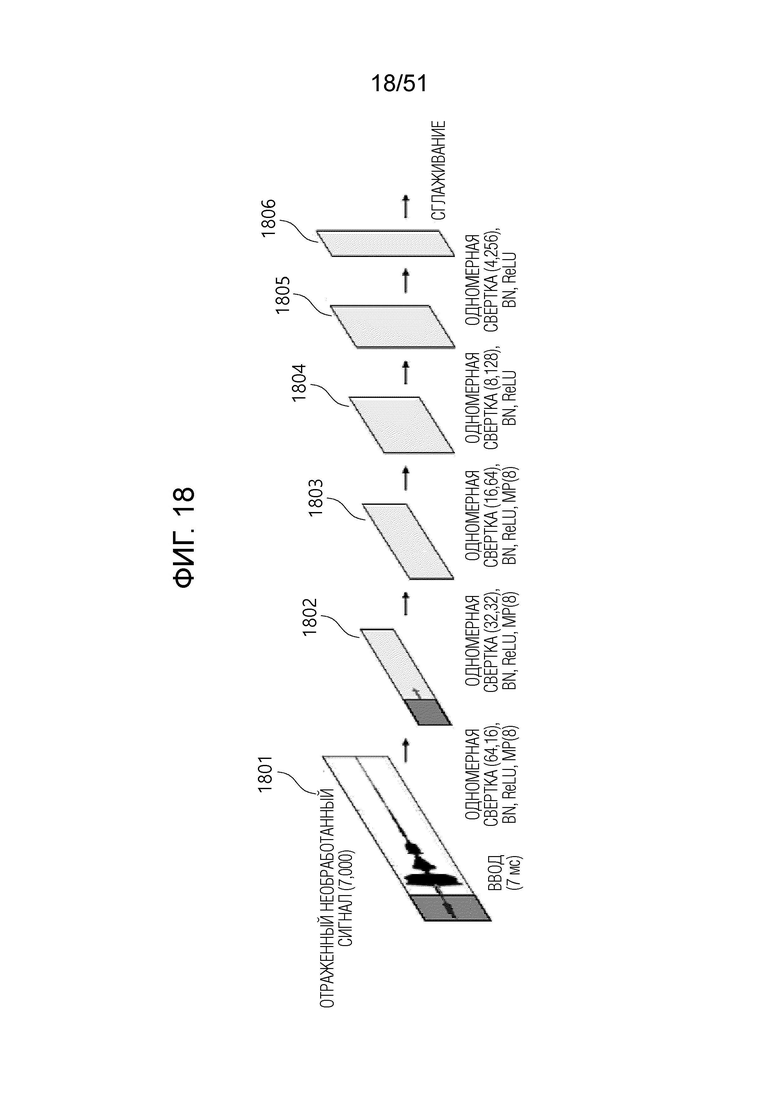
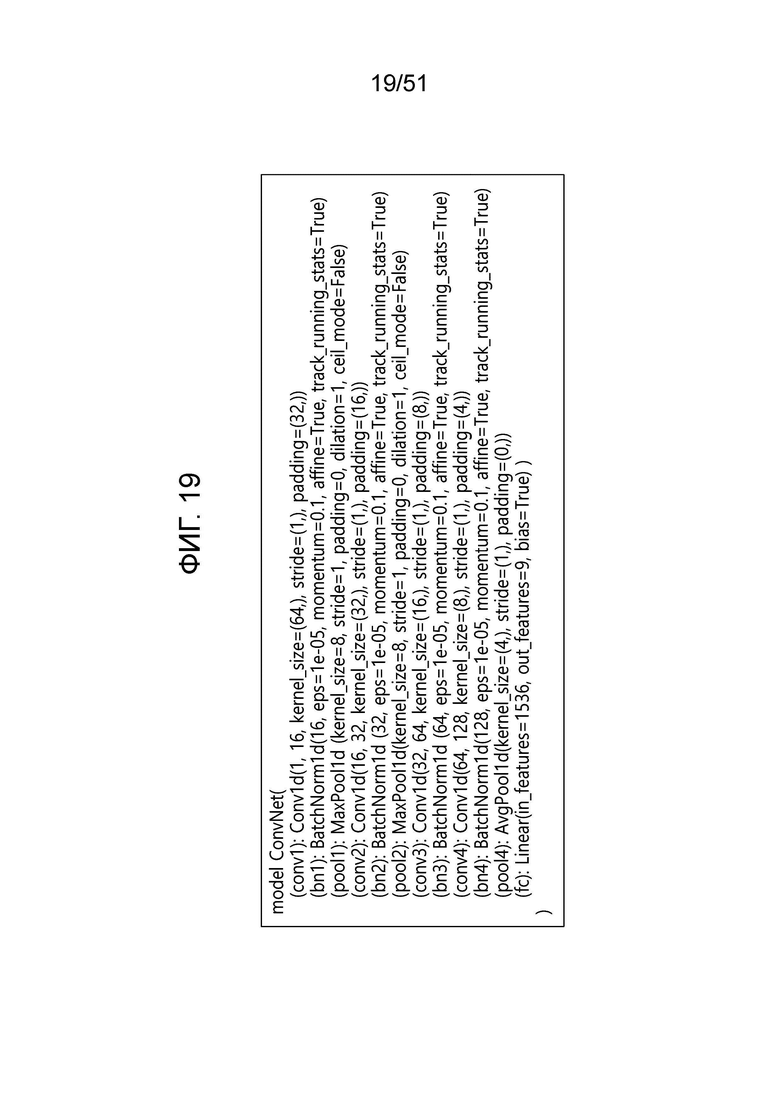
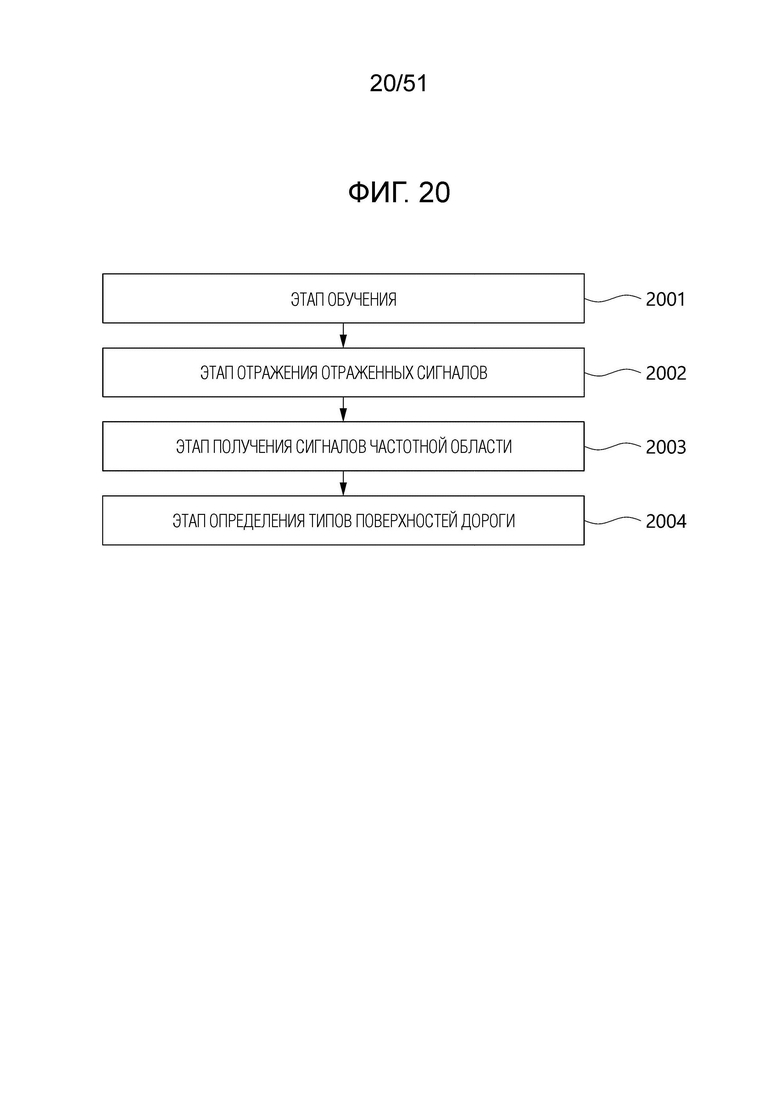
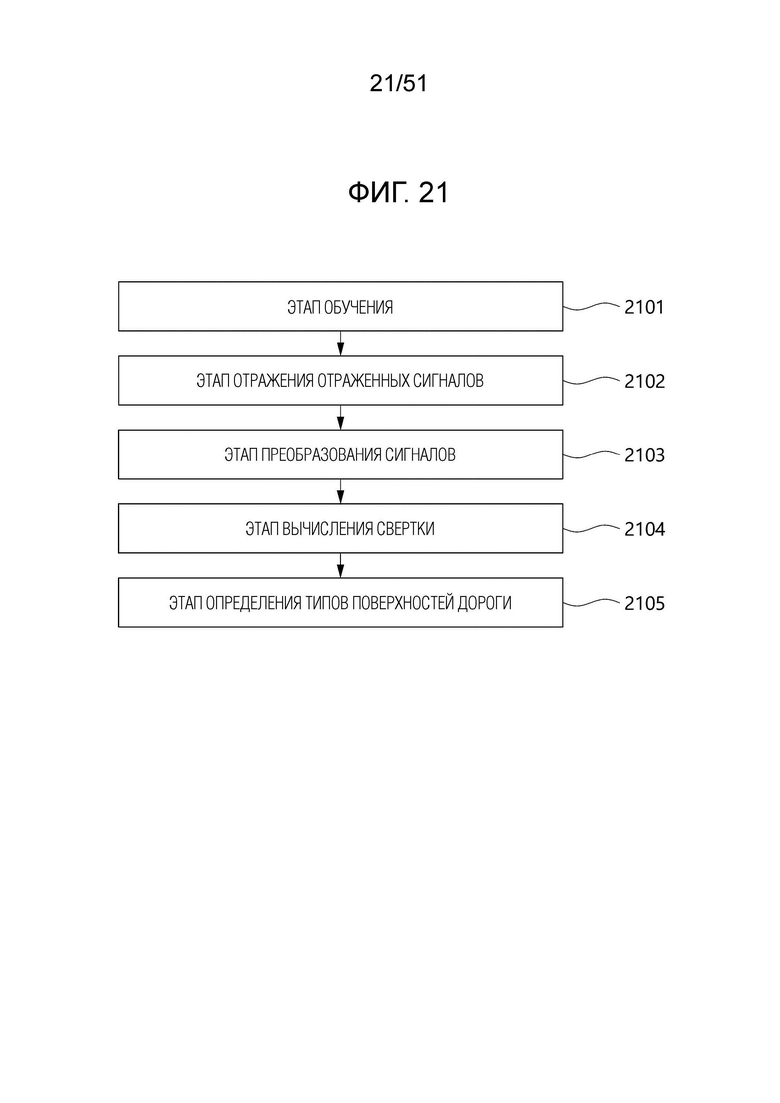
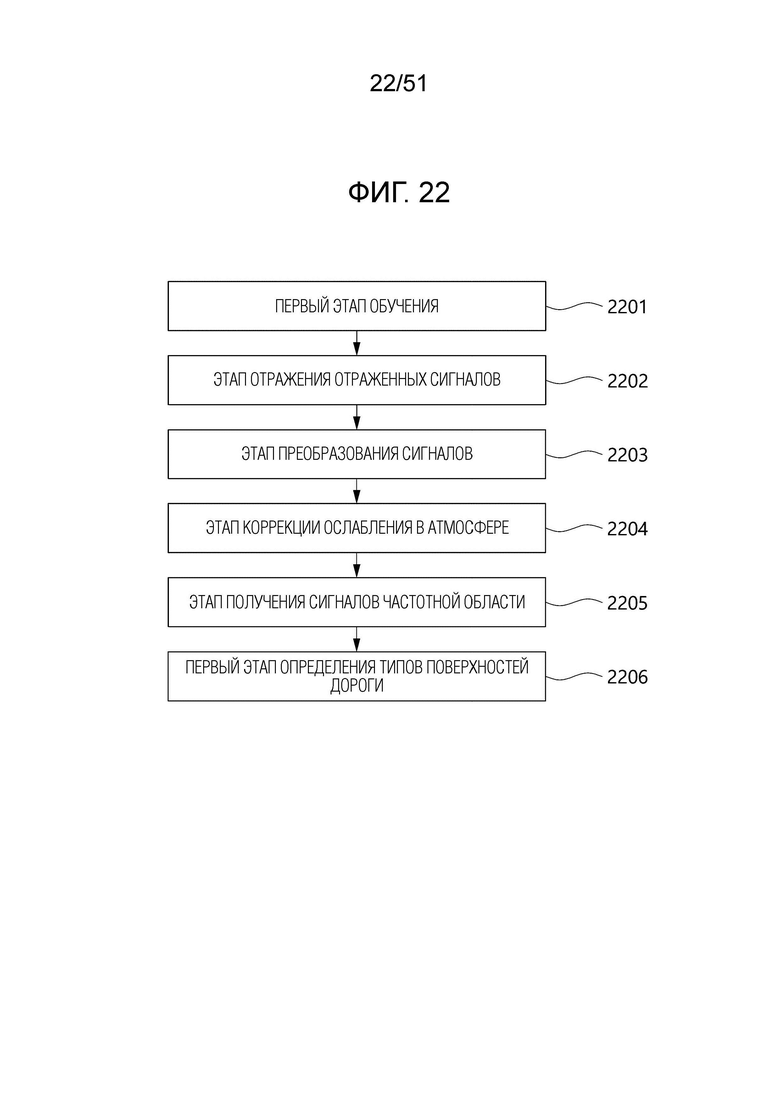
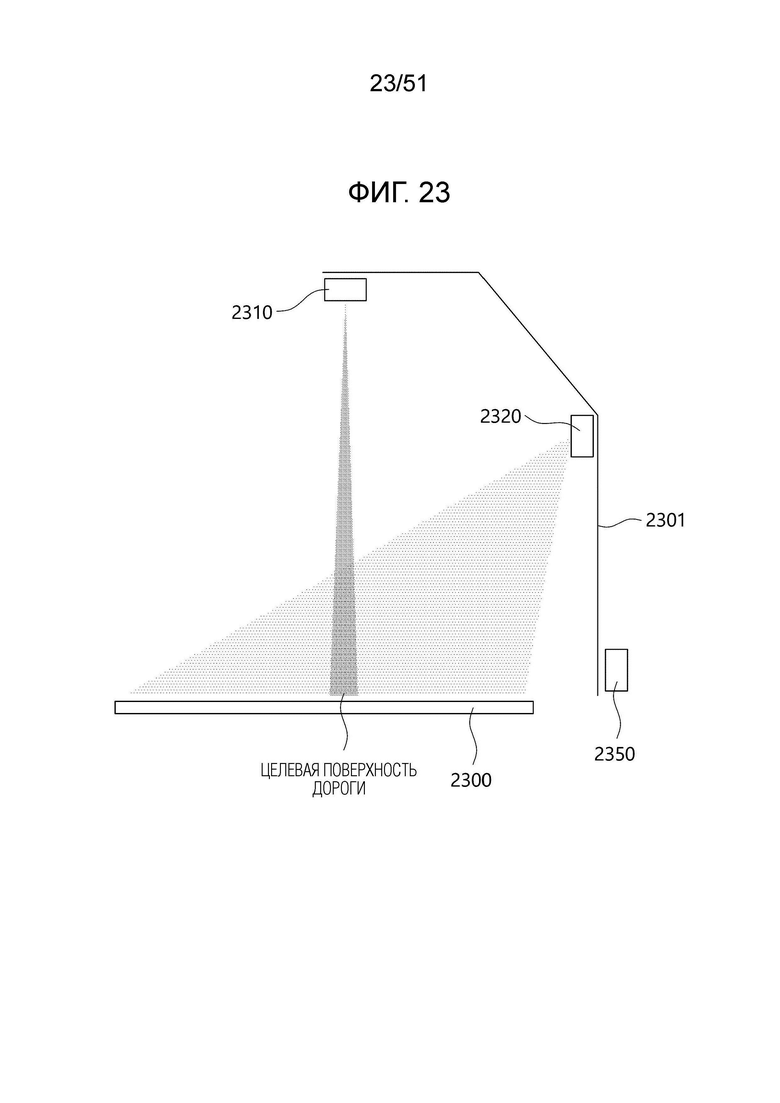
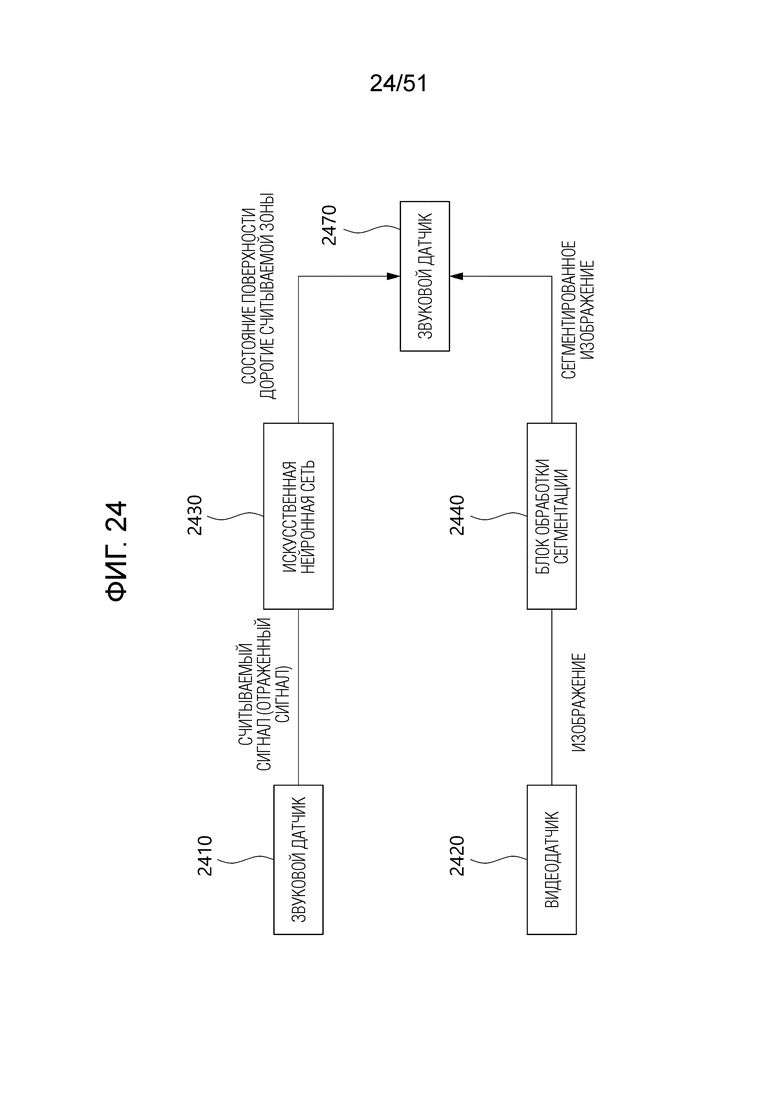
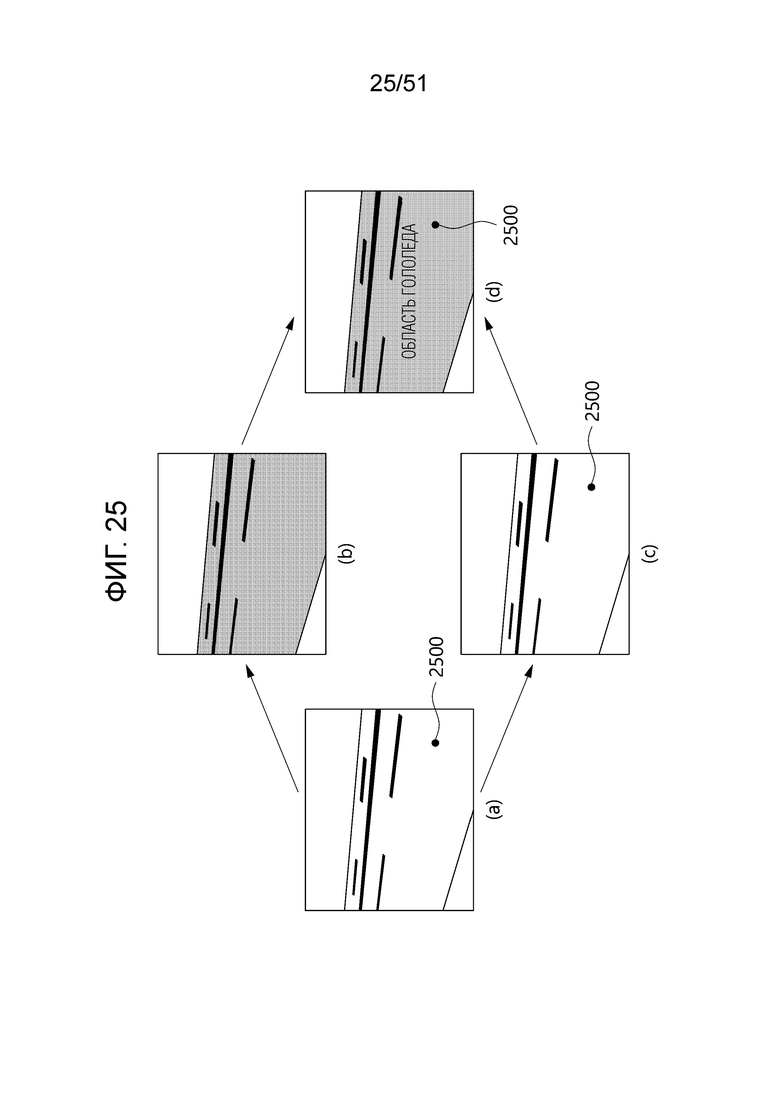
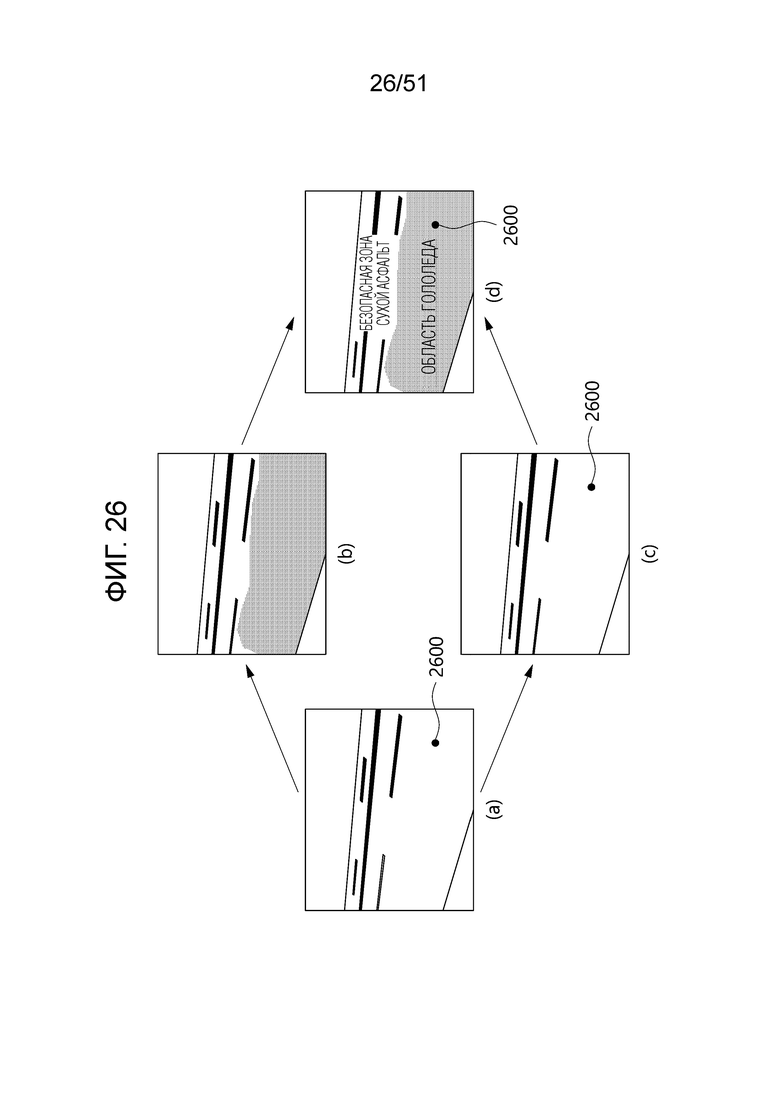
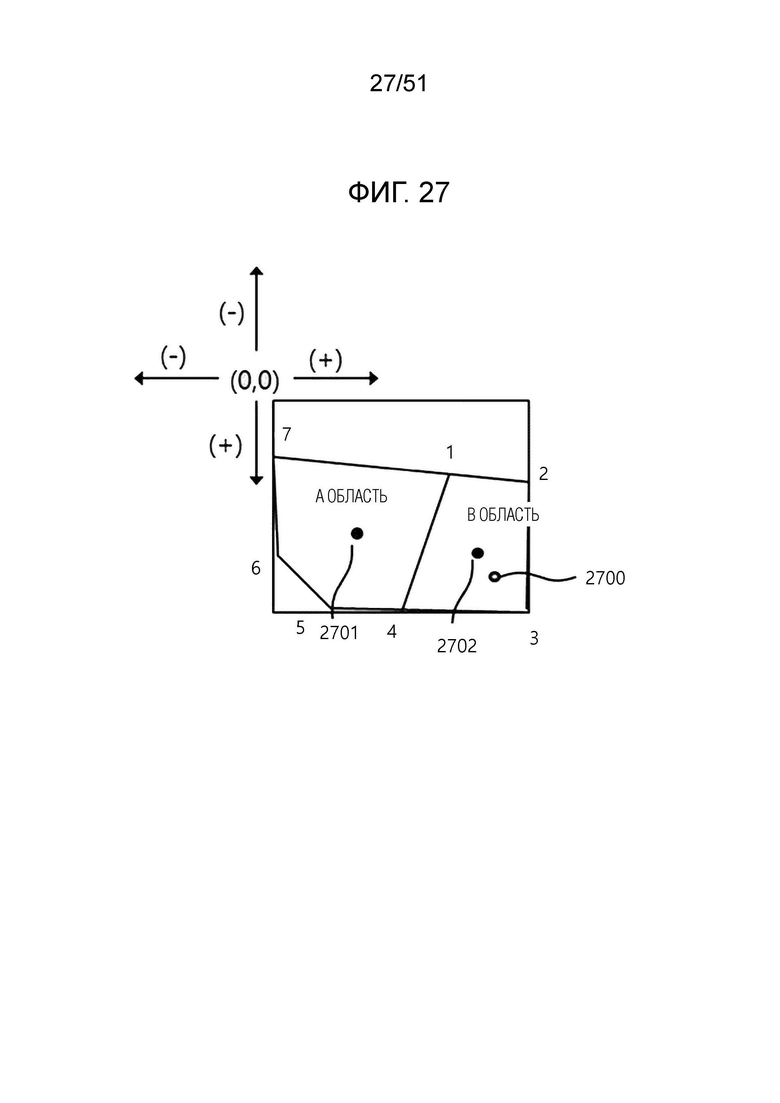
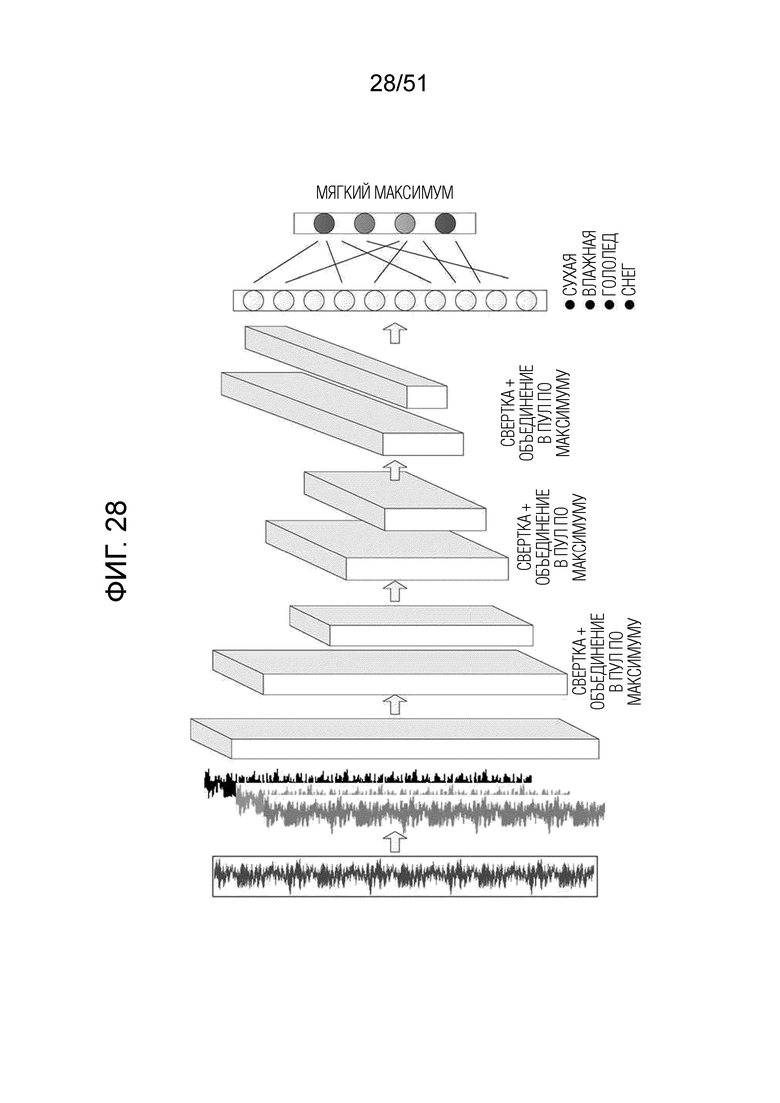
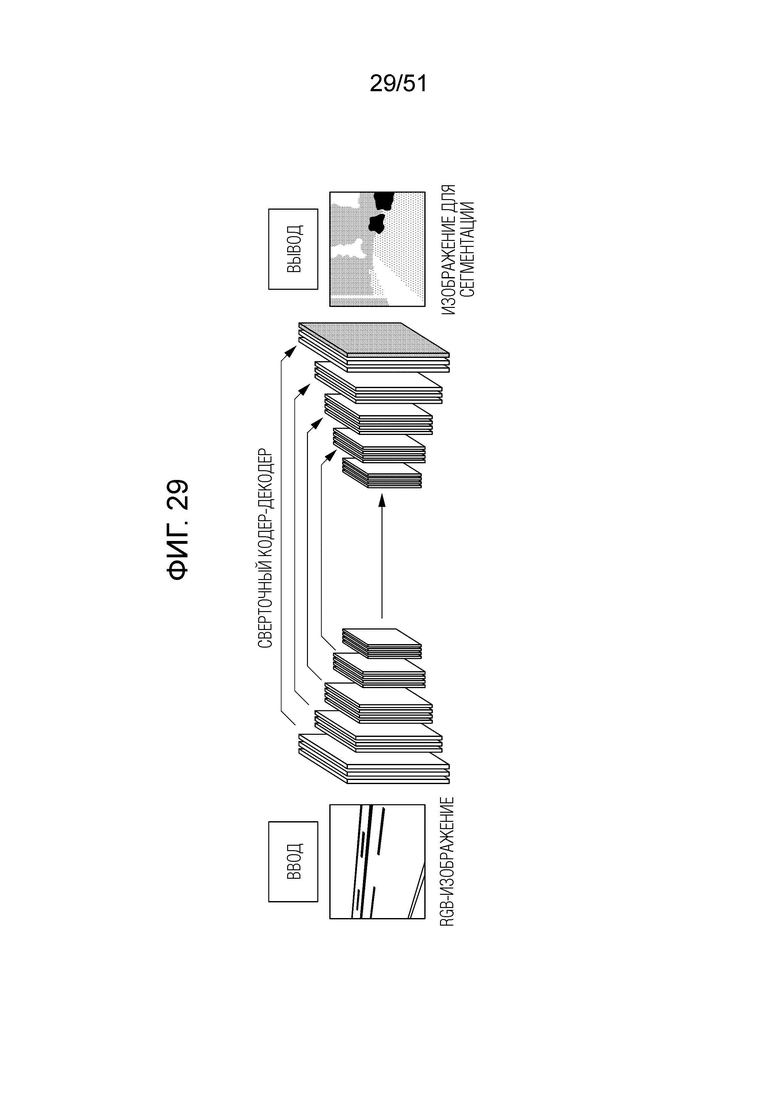
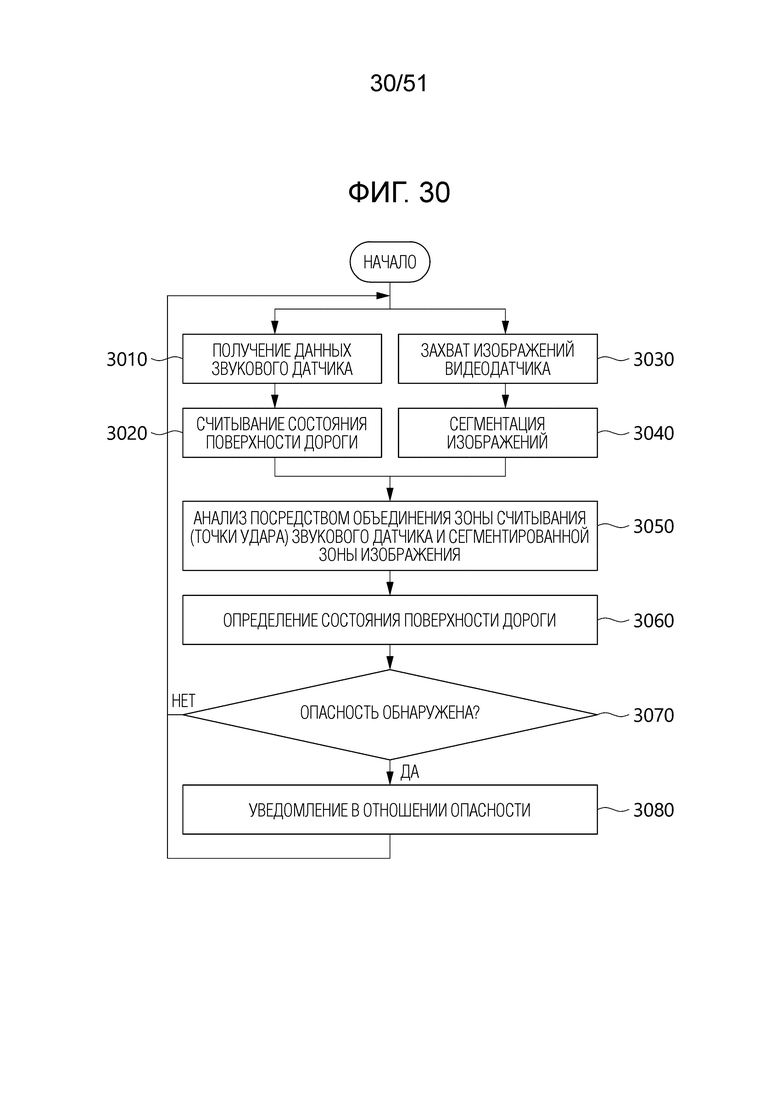
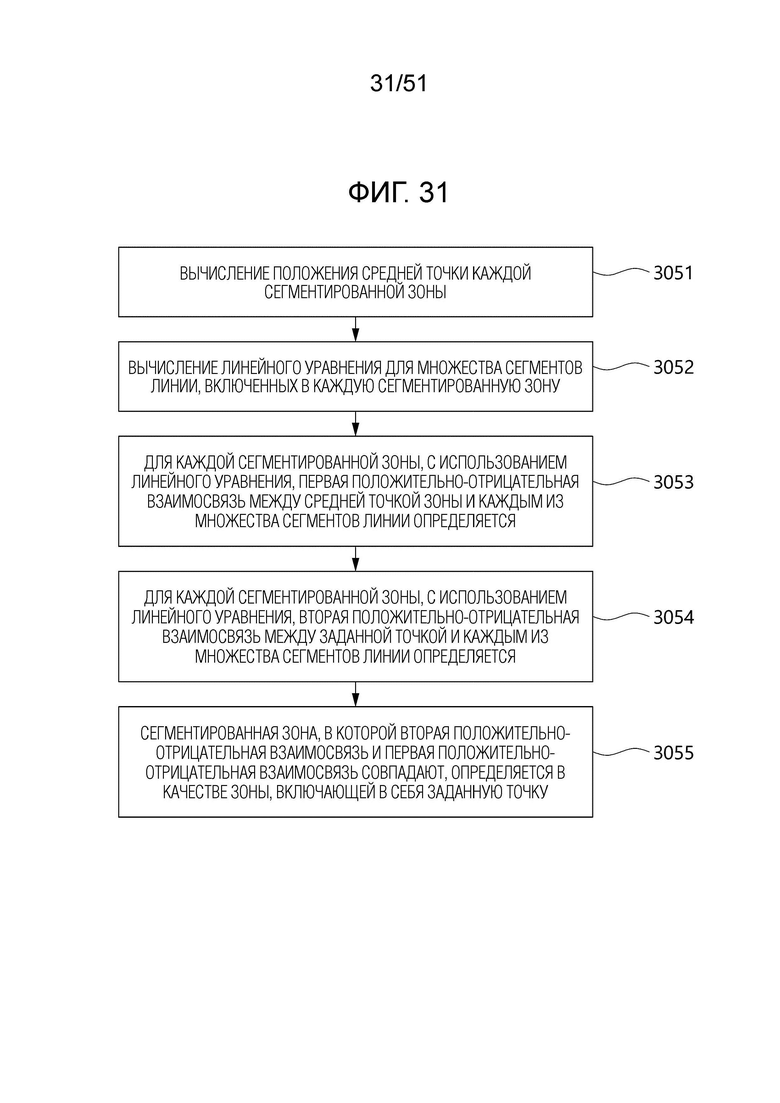
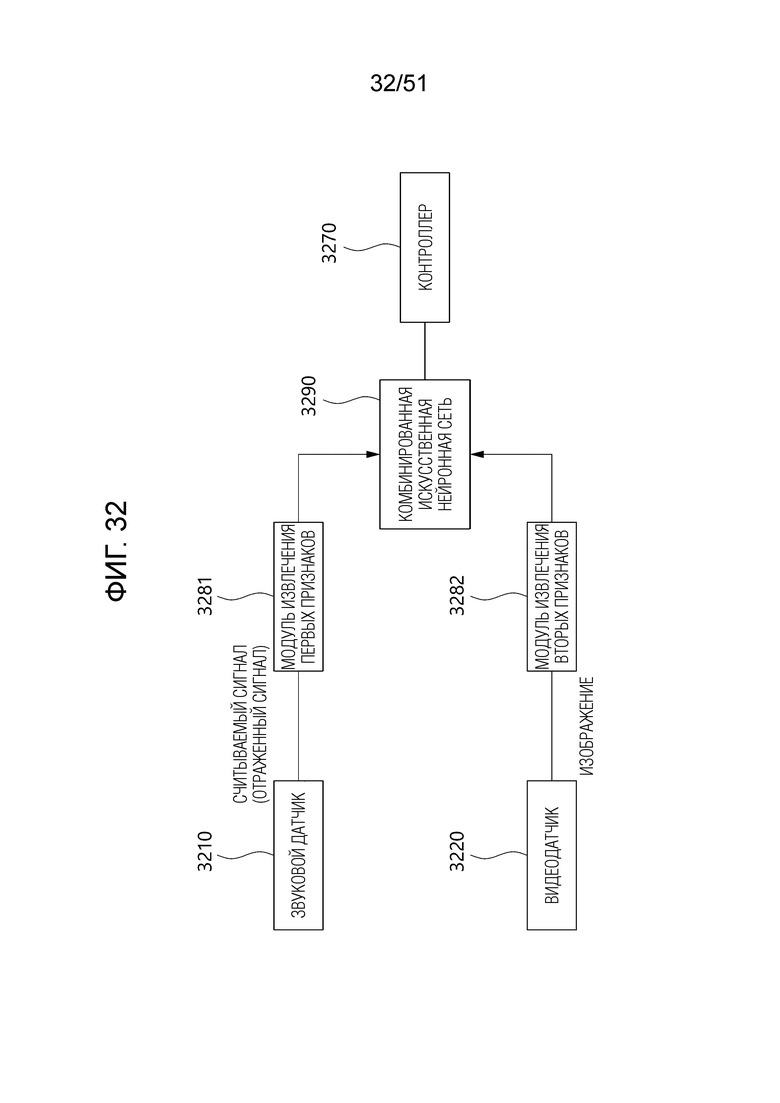
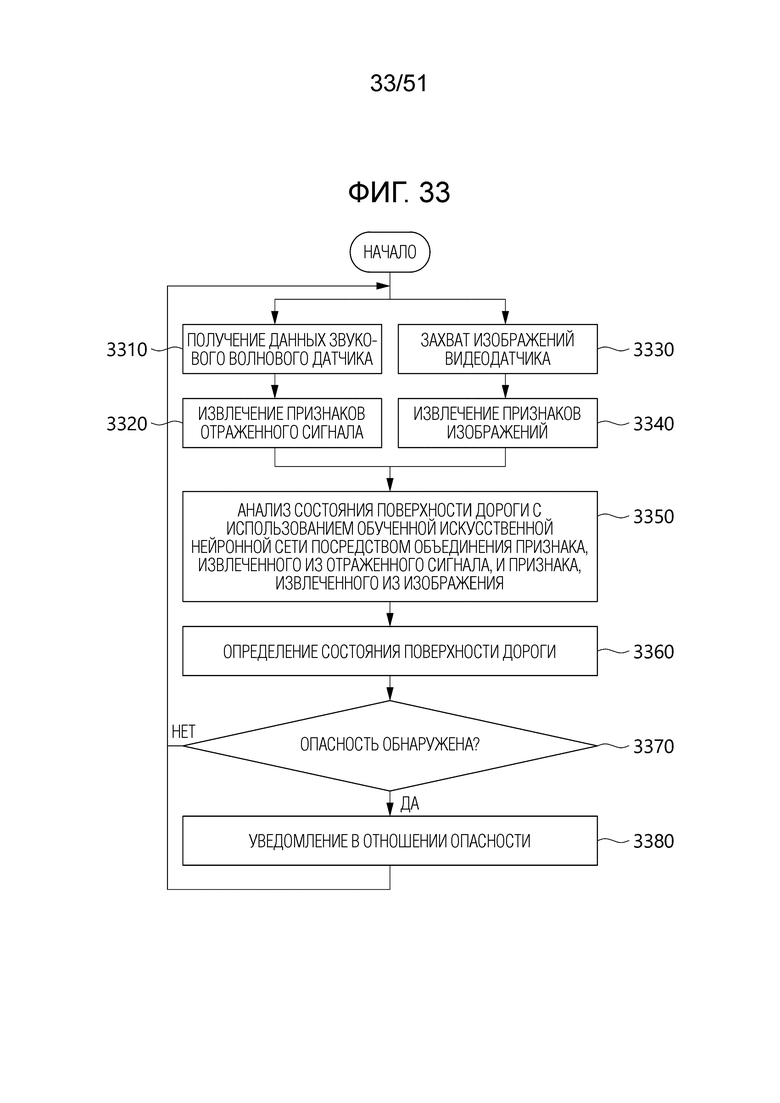
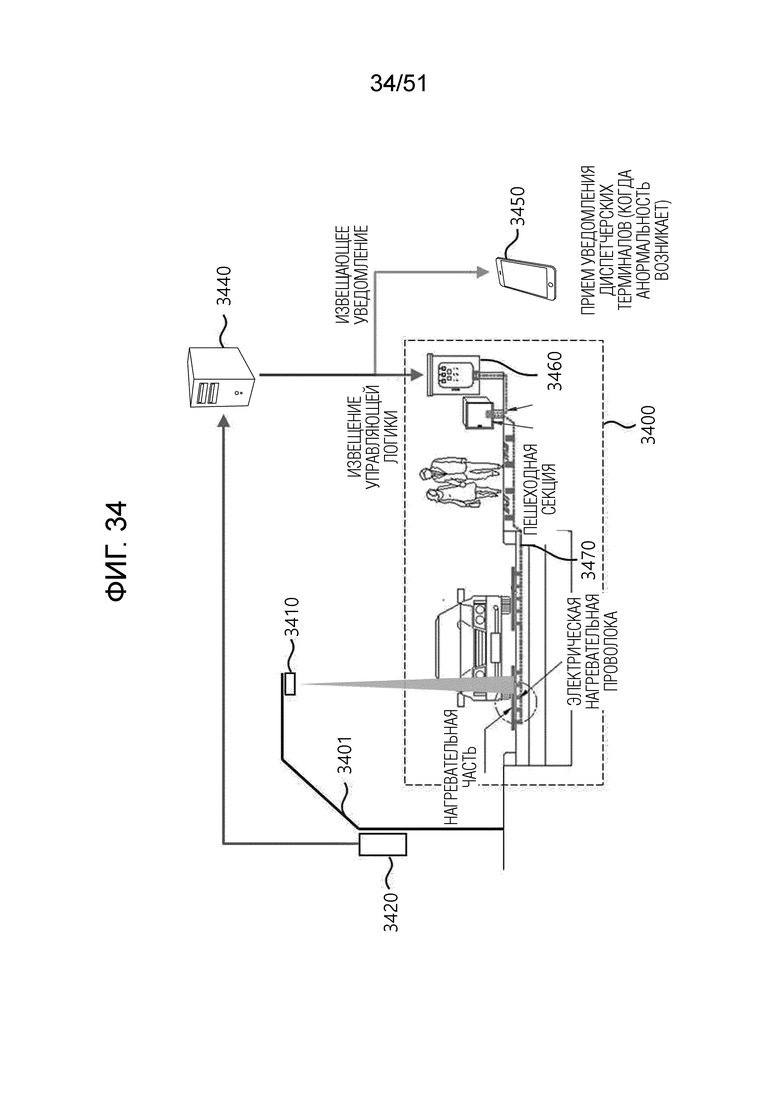
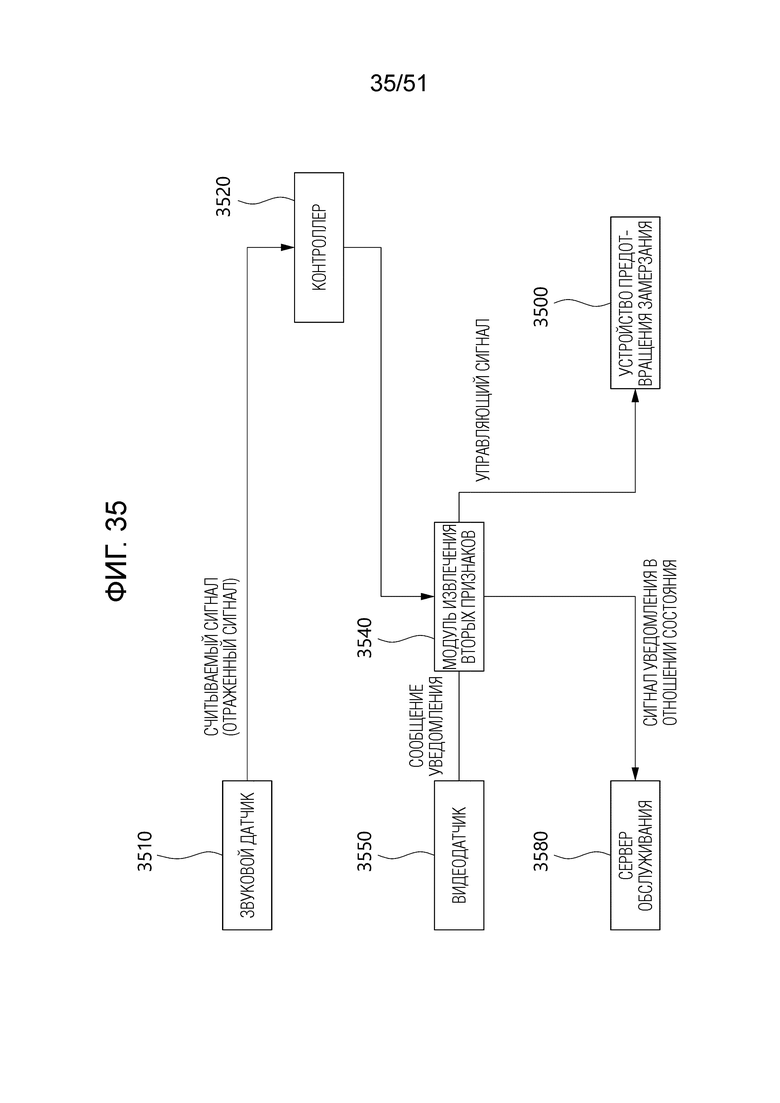
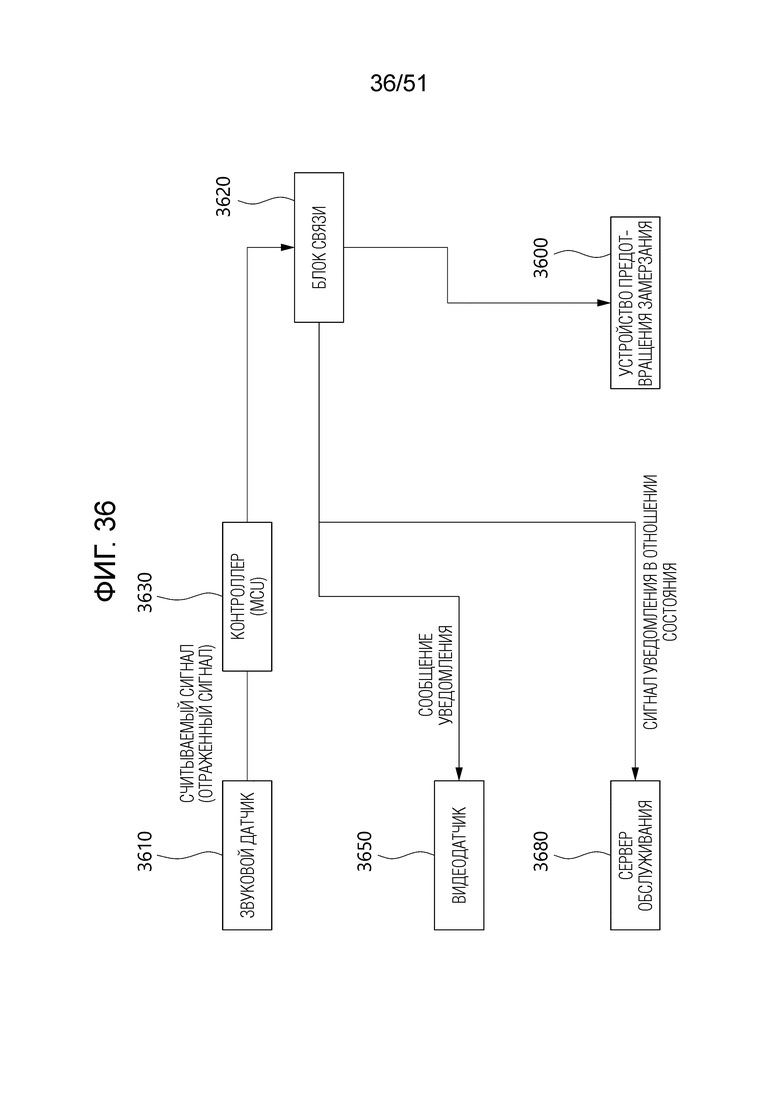
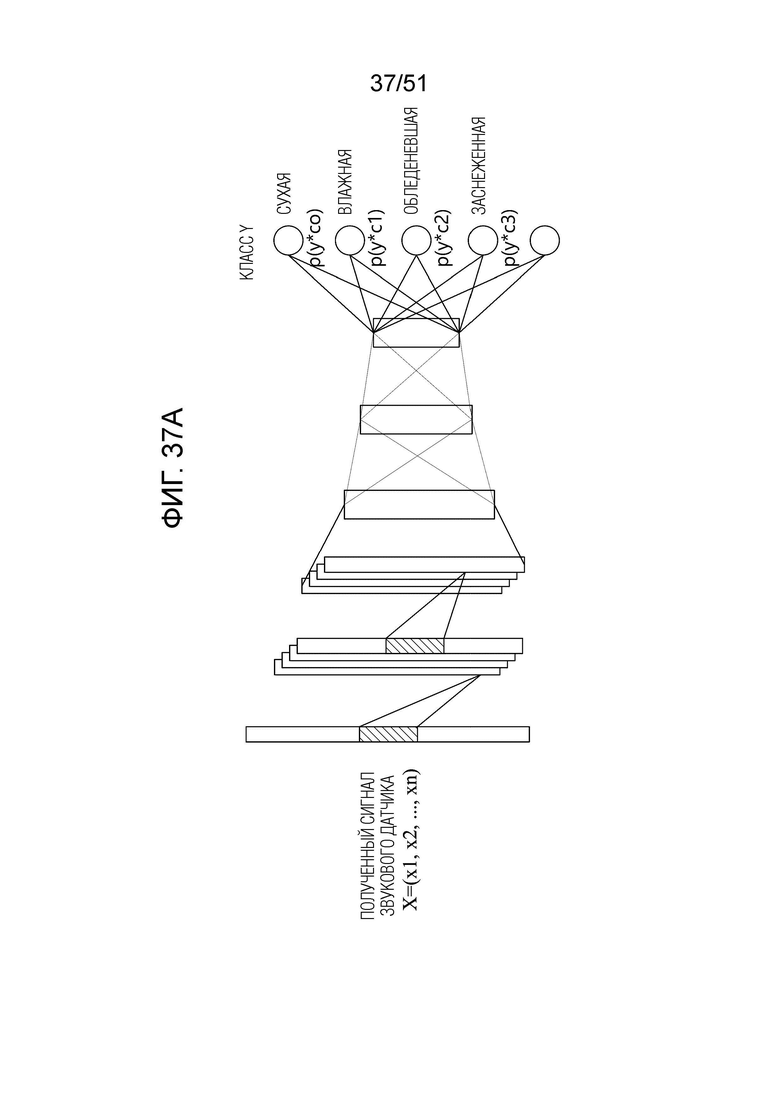
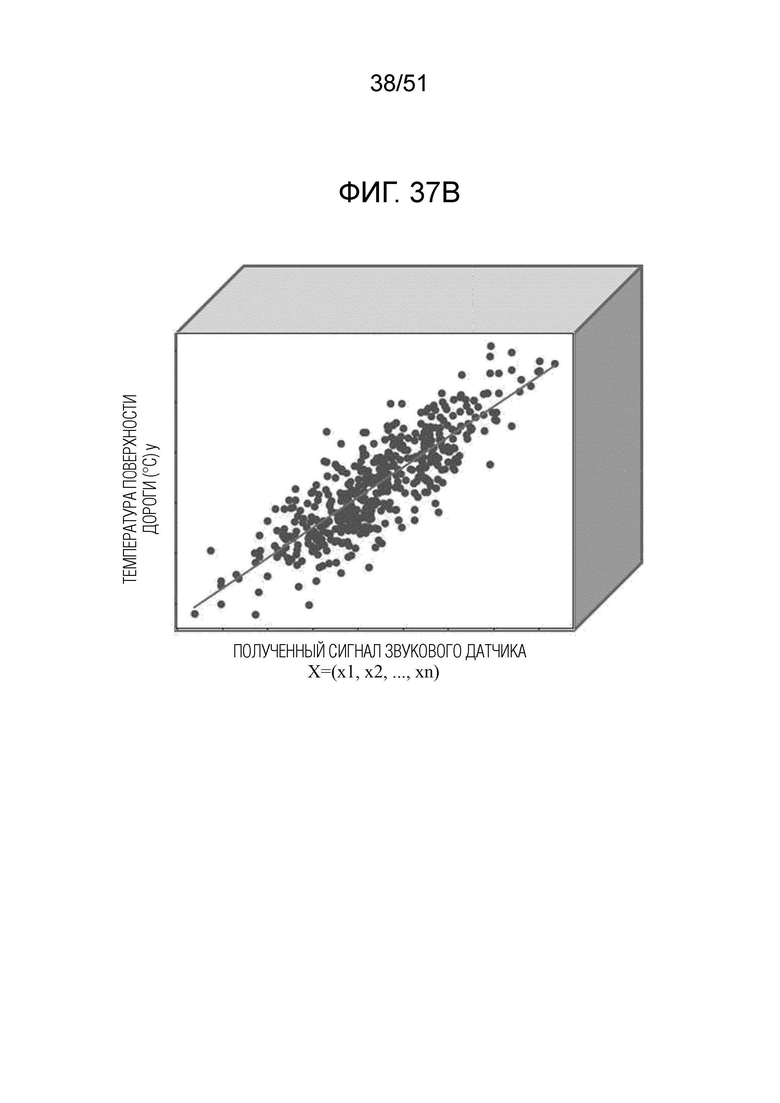
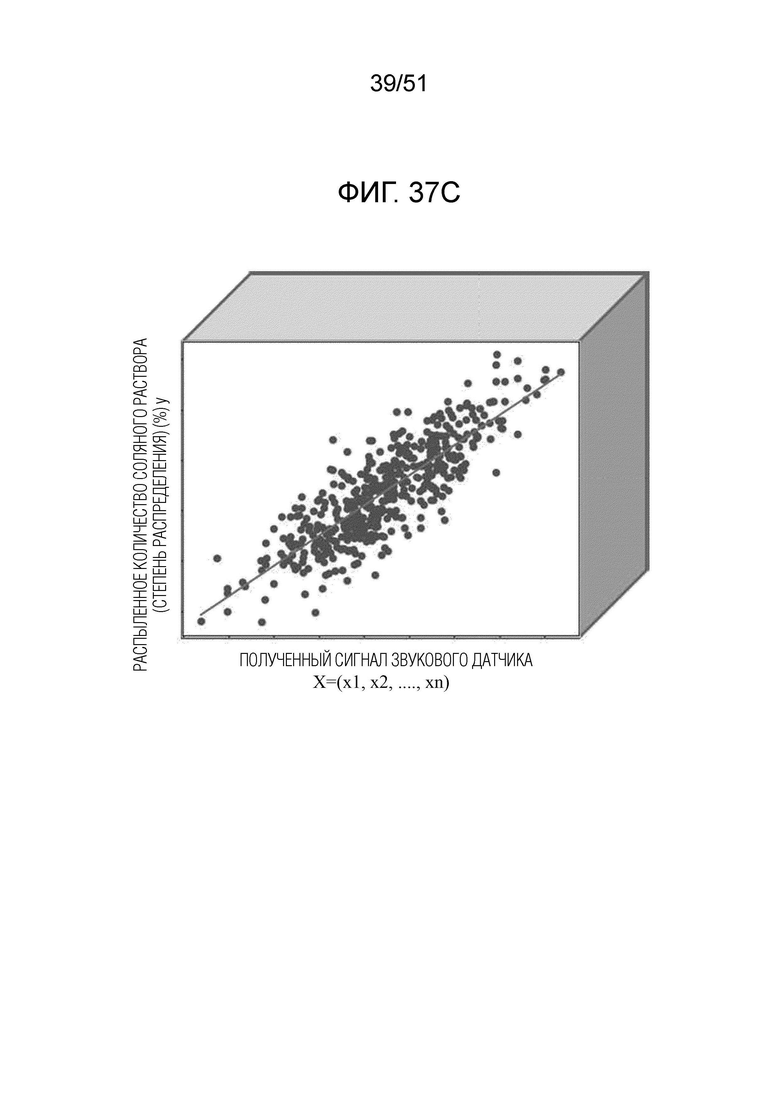
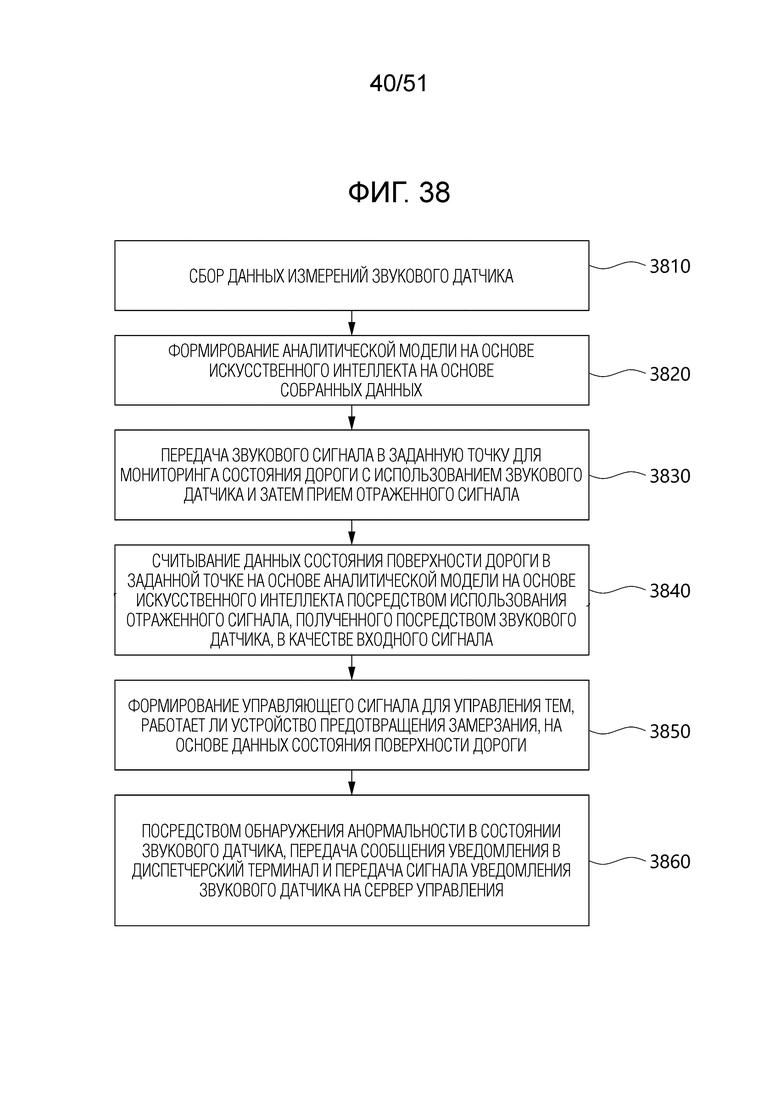
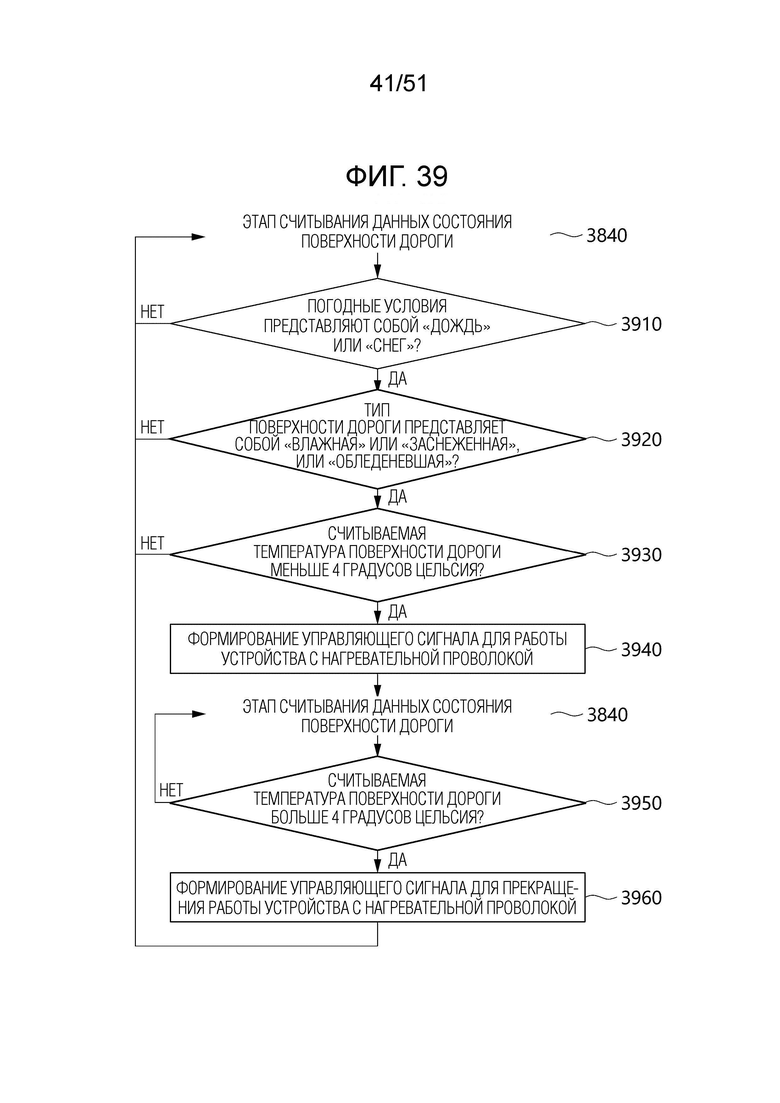
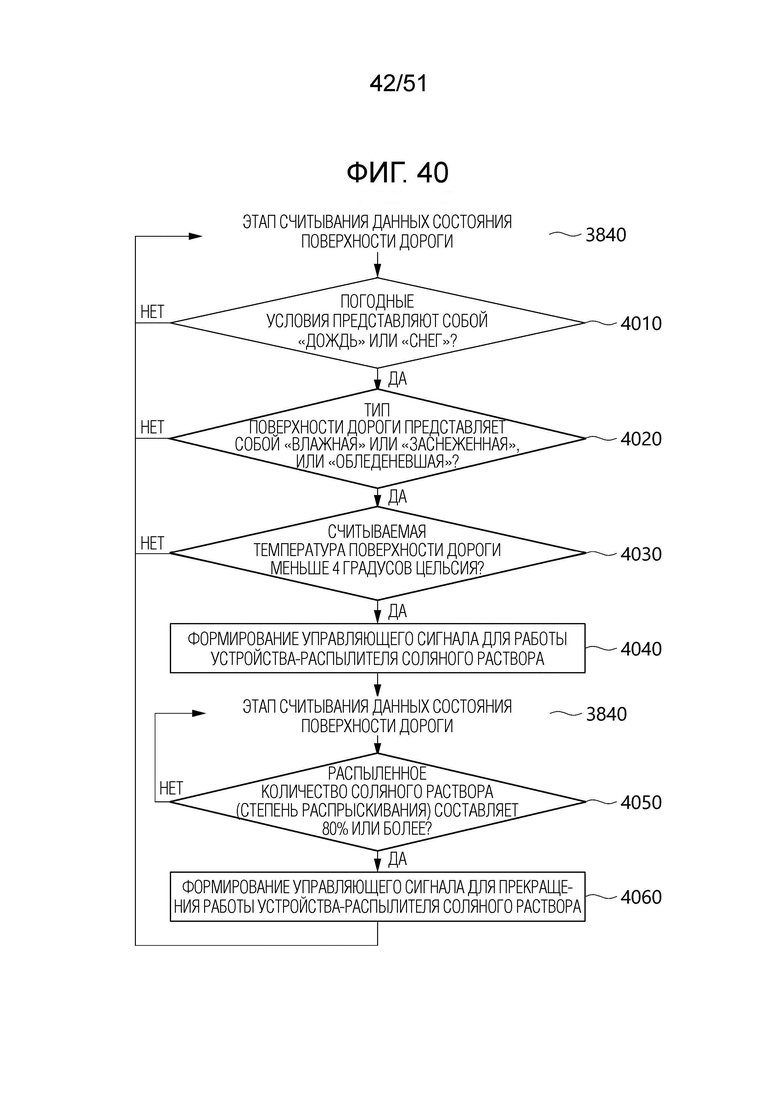
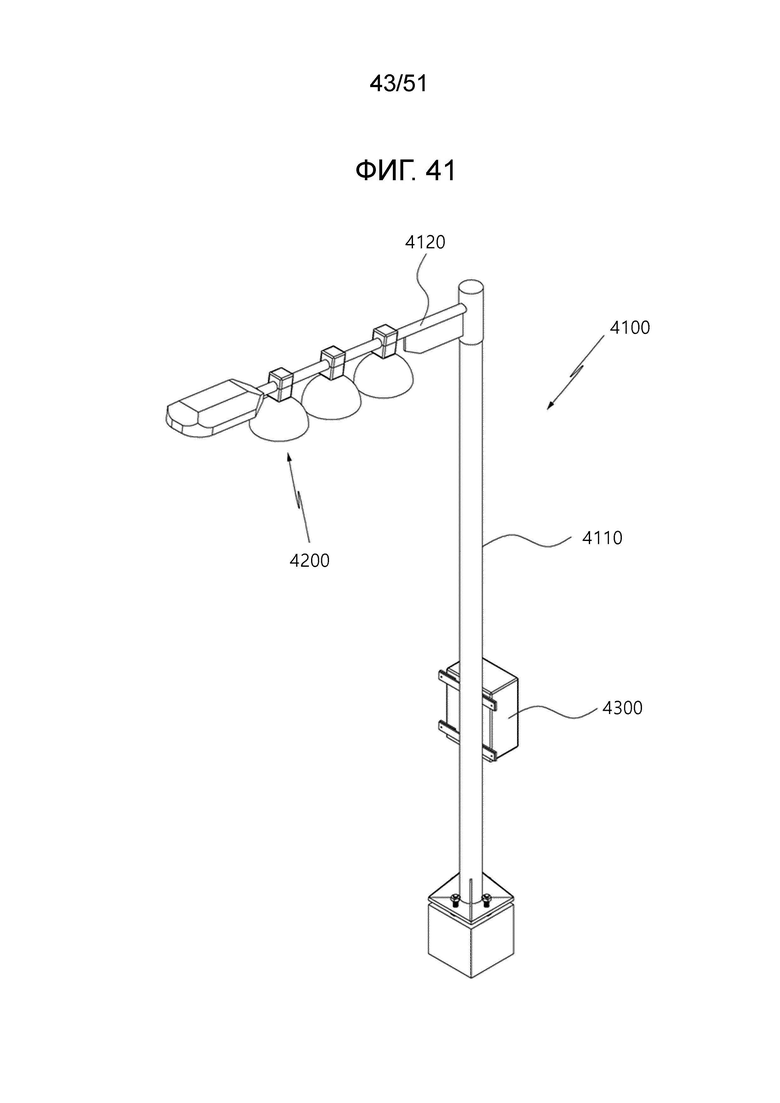
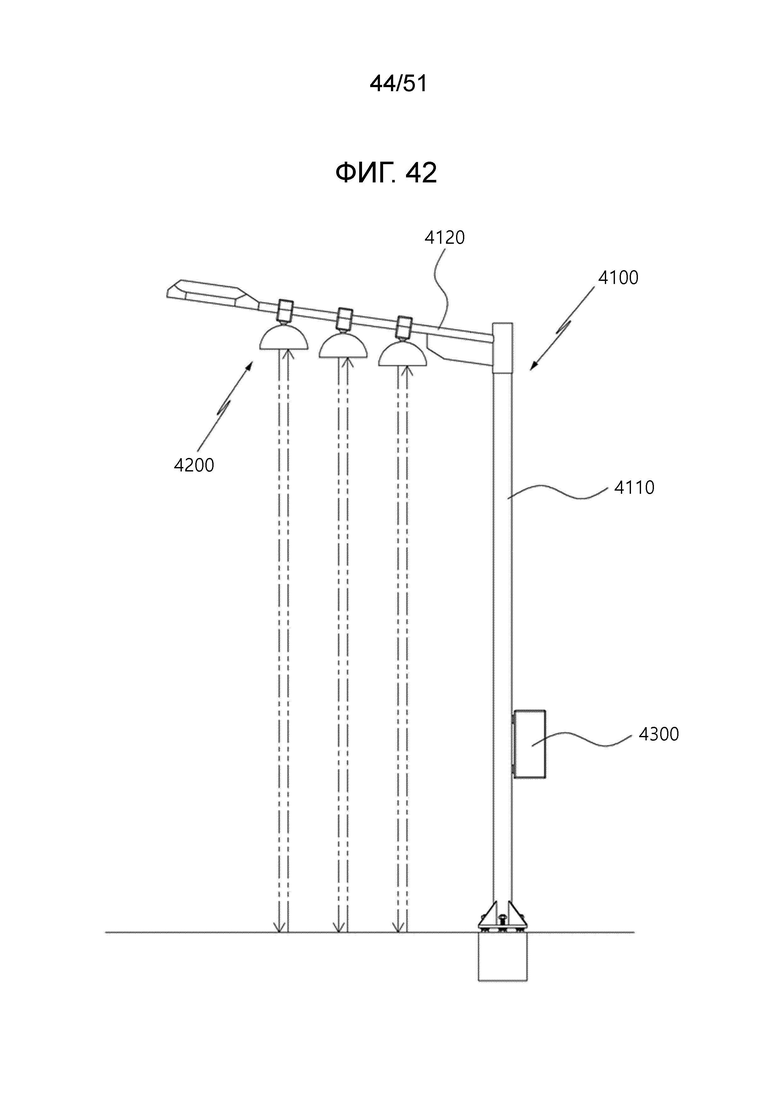
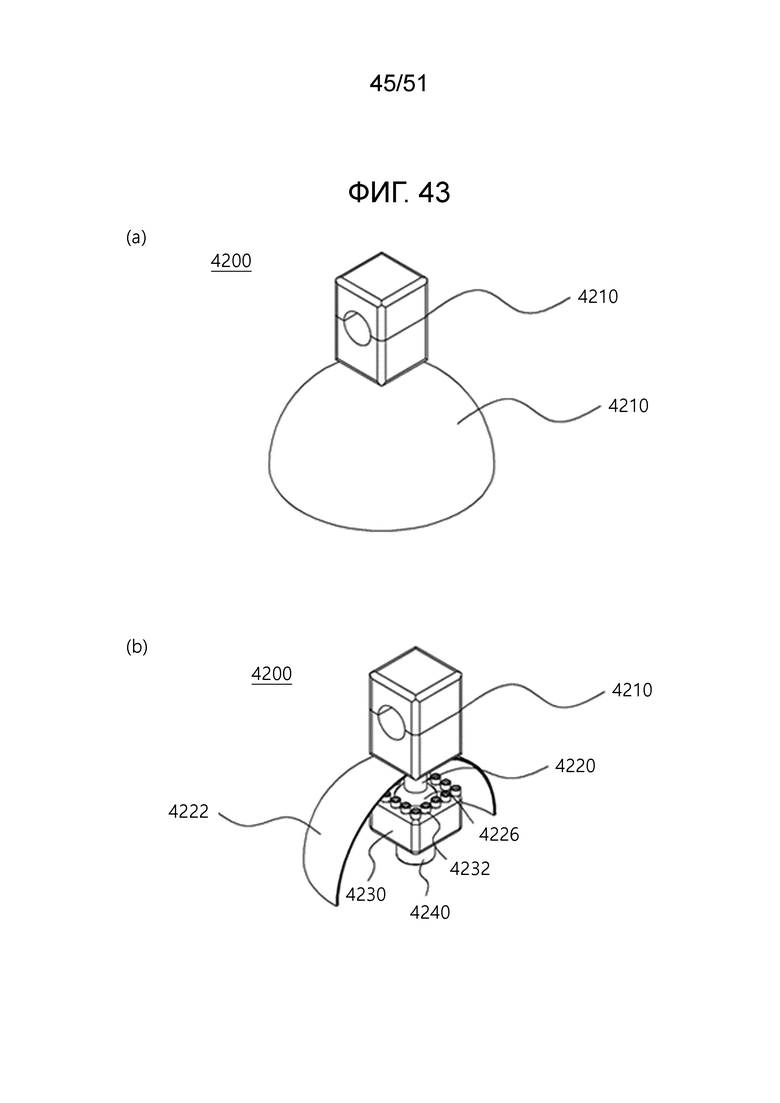
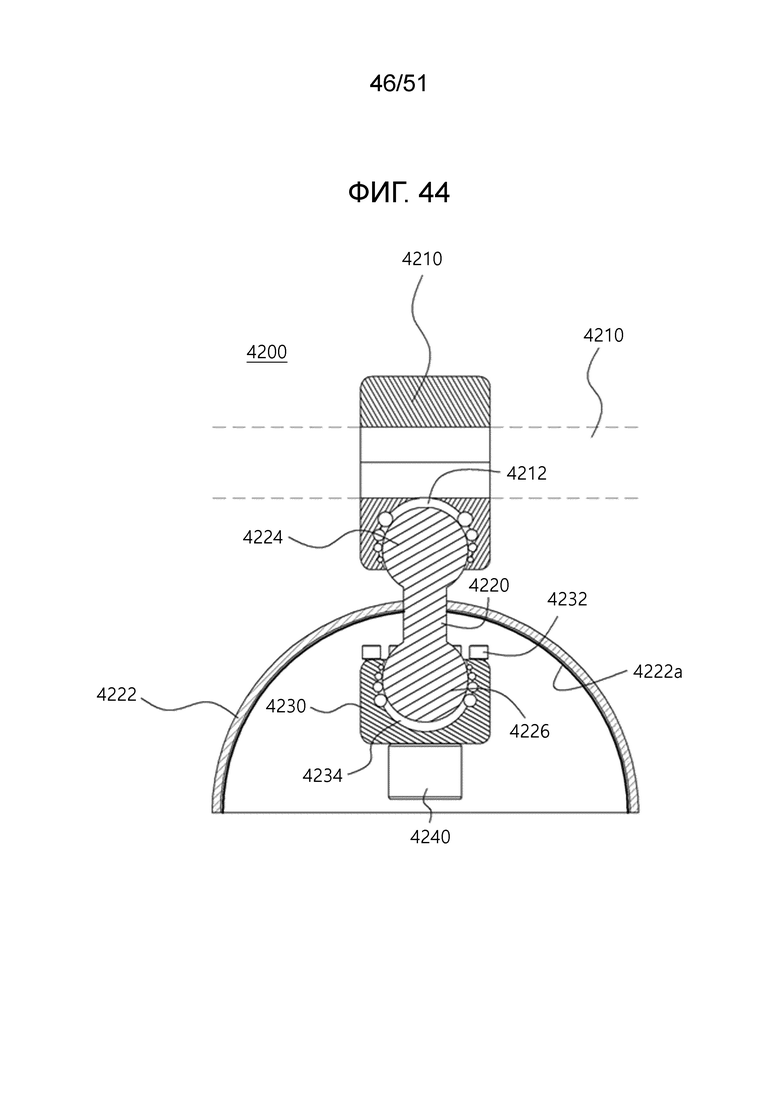
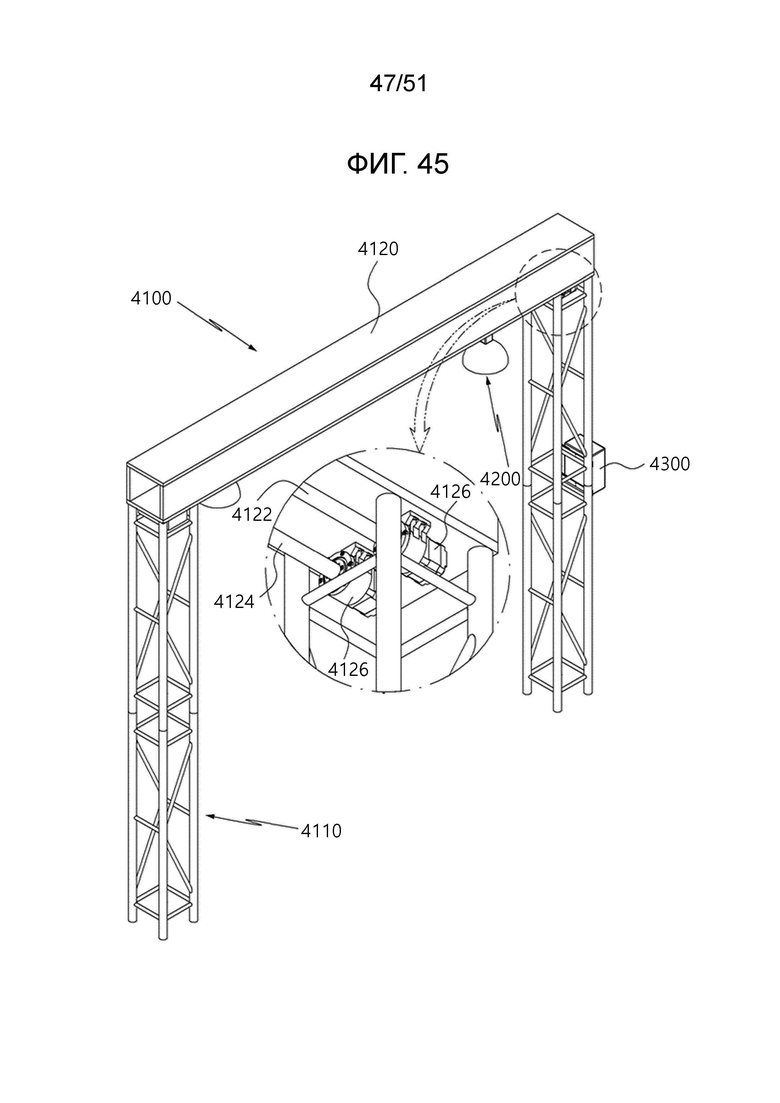
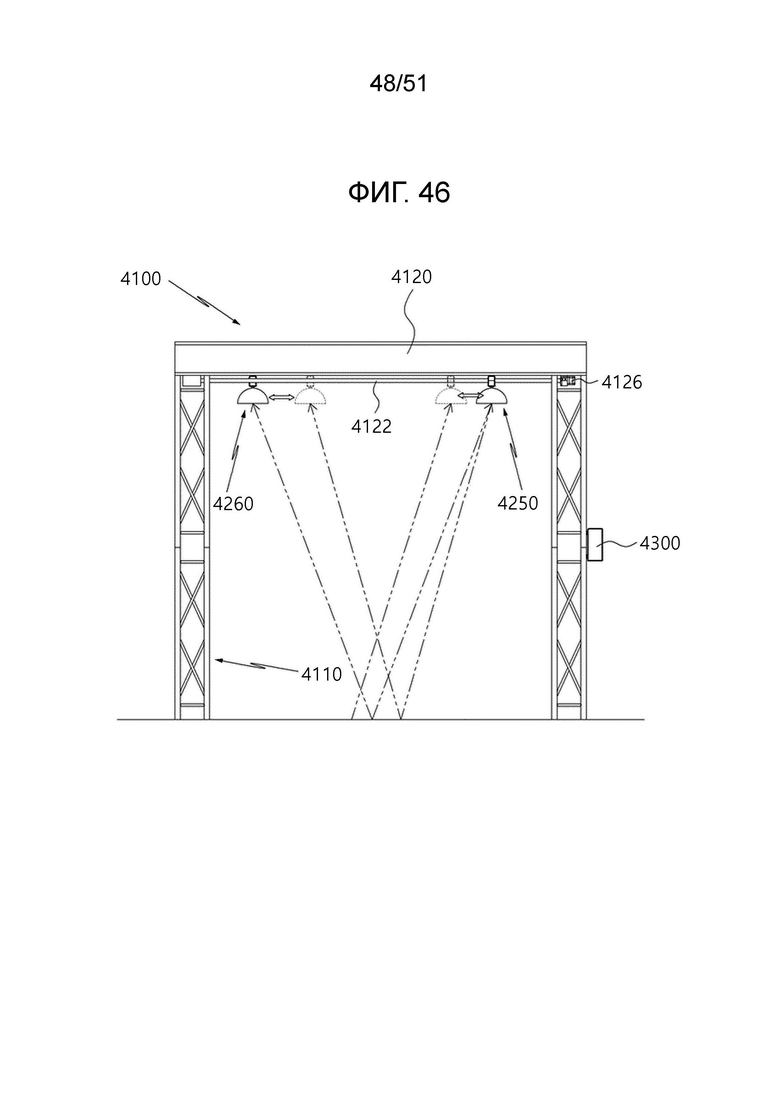
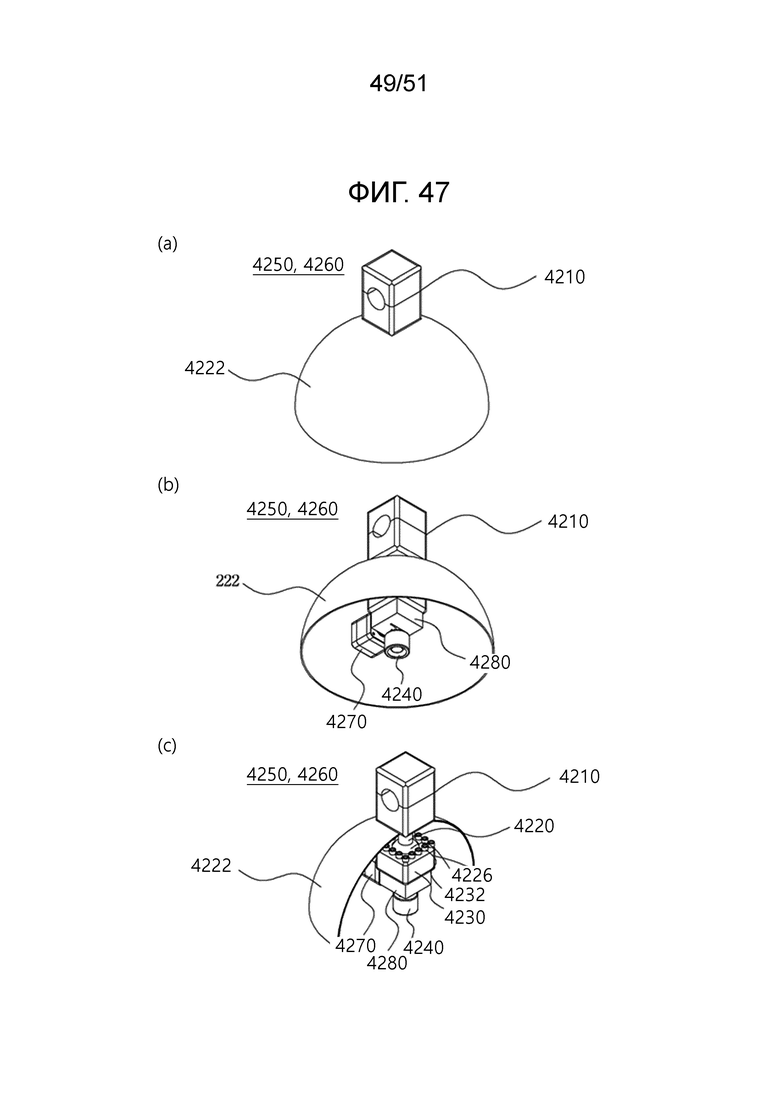
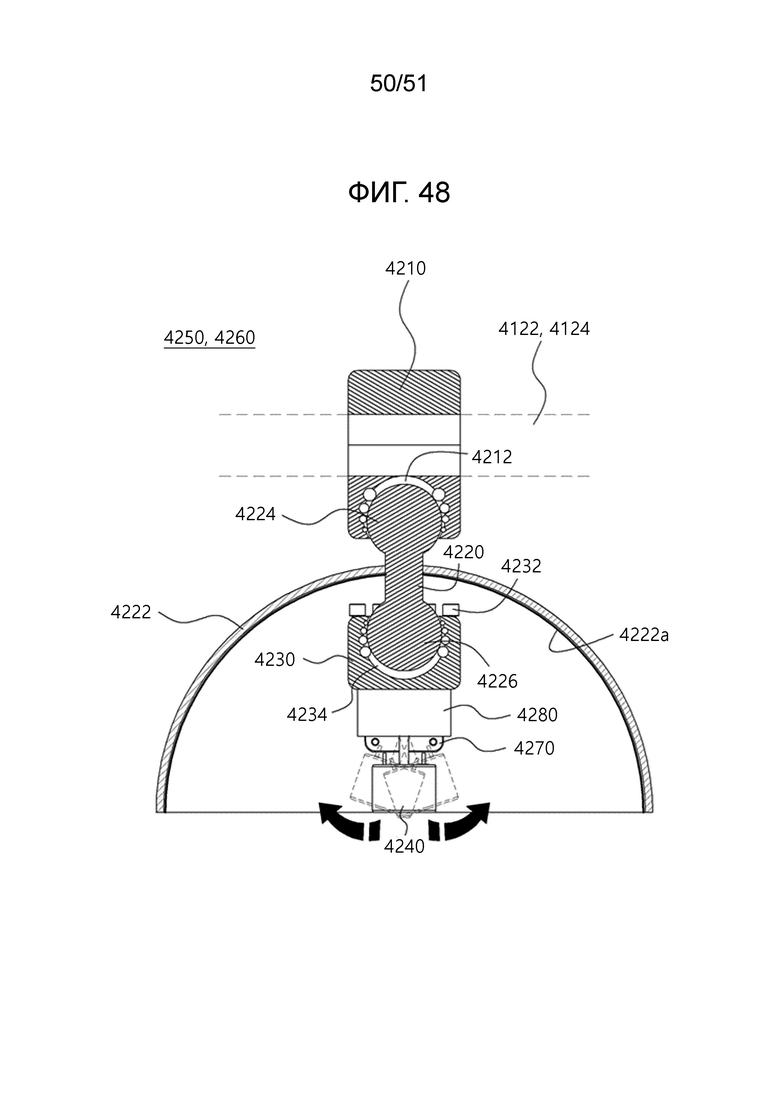
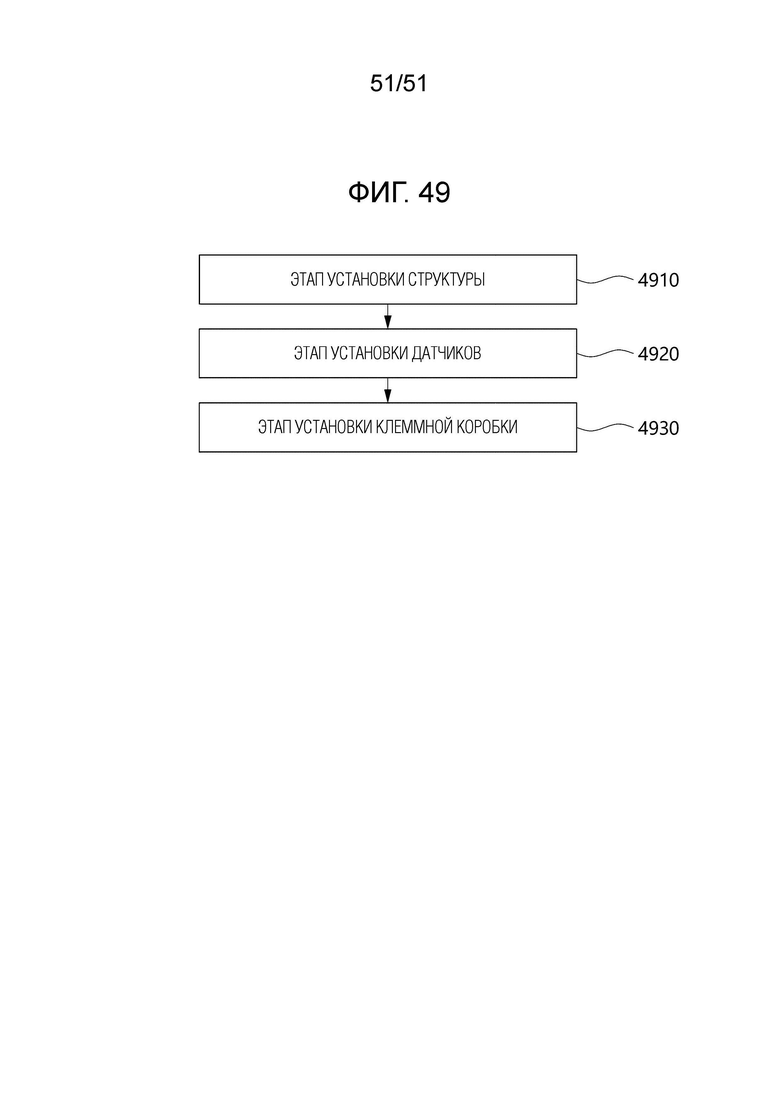
Изобретение относится к способу и устройству для классификации поверхности дороги с использованием звукового сигнала. Технический результат заключается в повышении быстроты и точности классификации дорожного полотна. В способе передают звуковой сигнал к целевой поверхности дороги, удалённой от электронного устройства на первое расстояние; принимают сигнал отражения звукового сигнала для целевой поверхности дороги; получают информацию состояния атмосферы, связанную со звуковым сигналом; получают первые данные для принимаемого отраженного сигнала; формируют вторые данные посредством коррекции первых данных на основе информации состояния атмосферы; получают третьи данные, связанные с информацией частотной области вторых данных, на основе вторых данных; и определяют тип целевой поверхности дороги на основе третьих данных и искусственной нейронной сети классификации поверхностей дороги, и при этом искусственная нейронная сеть классификации поверхностей дороги обучается в качестве набора данных частотной области, сформированного на основе звукового сигнала, отражаемого от поверхности дороги на второе расстояние, отличающееся от первого расстояния. 2 н. и 13 з.п. ф-лы, 51 ил.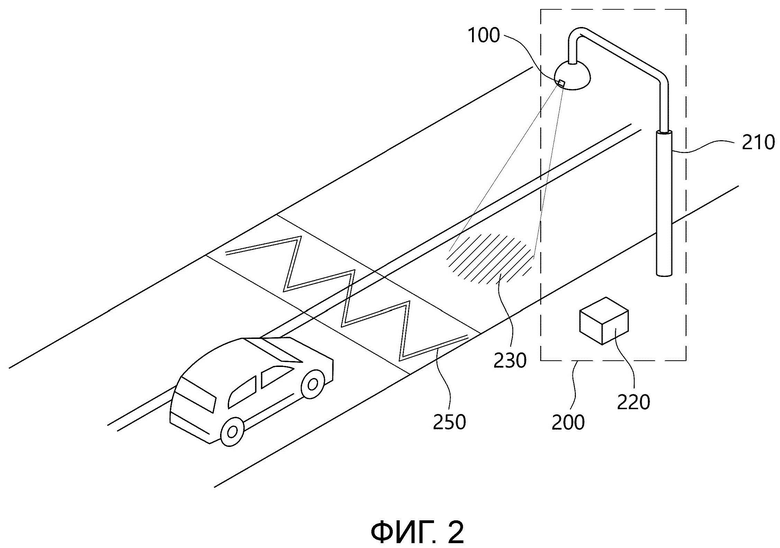
1. Электронное устройство для классификации поверхности дороги с использованием звукового сигнала, причем электронное устройство содержит:
- приемо-передающее устройство, выполненное с возможностью передачи и приёма звукового сигнала;
- датчик состояния атмосферы; и
- по меньшей мере один процессор, соединенный электронными средствами с приемо-передающим устройством и датчиком состояния атмосферы, при этом по меньшей мере один процессор выполнен с возможностью:
- передачи звукового сигнала к целевой поверхности дороги, удаленной от электронного устройства на первое расстояние, с использованием приемо-передающего устройства,
- приёма отраженного сигнала для звукового сигнала для целевой поверхности дороги с использованием приемо-передающего устройства,
- получения информации состояния атмосферы, связанной со звуковым сигналом, с использованием датчика состояния атмосферы,
- получения первых данных для принимаемого отраженного сигнала,
- формирования вторых данных посредством коррекции первых данных на основе информации состояния атмосферы,
- получения третьих данных, связанных с информацией частотной области вторых данных, на основе вторых данных, и
- определения типа целевой поверхности дороги на основе третьих данных и искусственной нейронной сети классификации поверхностей дороги, и
- при этом искусственная нейронная сеть классификации поверхностей дороги обучается в качестве набора данных частотной области, сформированного на основе звукового сигнала, отражаемого от поверхности дороги на второе расстояние, отличающееся от первого расстояния.
2. Электронное устройство по п. 1, в котором вторые данные формируются посредством коррекции первых данных на основе информации состояния атмосферы и первого расстояния.
3. Электронное устройство по п. 1, в котором первое расстояние оценивается на основе времени передачи звукового сигнала и времени приема отраженного сигнала.
4. Электронное устройство по п. 1, в котором третьи данные получаются посредством преобразования вторых данных в STFT (кратковременное преобразование Фурье).
5. Электронное устройство по п. 1, в котором по меньшей мере один процессор выполнен с возможностью формирования сигнала для управления устройством обслуживания поверхности дороги, установленным на целевой поверхности дороги, на основе определенного типа целевой поверхности дороги, и
устройство обслуживания поверхности дороги содержит устройство с нагревательной проволокой или устройство-распылитель соляного раствора.
6. Электронное устройство по п. 5, в котором по меньшей мере один процессор выполнен с возможностью:
- определения, удовлетворяются ли предварительно установленные погодные условия,
- если предварительно установленные погодные условия удовлетворяются, формирования сигнала для управления устройством обслуживания поверхности дороги,
- определения, изменяется ли тип целевой поверхности дороги, определенный в первое время, во второе время, и
- если первый класс, определенный в первое время в качестве типа целевой поверхности дороги, и второй класс, определенный во второе время в качестве типа целевой поверхности дороги, отличаются, определения необходимости формирования сигнала для управления устройством, установленным на целевой поверхности дороги, на основе типа целевой поверхности дороги, определенного в третье время.
7. Электронное устройство по п. 1, в котором тип целевой поверхности дороги определяется в каждом первом периоде и по меньшей мере один процессор выполнен с возможностью определения типа целевой поверхности дороги в каждом втором периоде, когда тип целевой поверхности дороги определяется в качестве первого класса.
8. Электронное устройство по п. 1, при этом электронное устройство дополнительно содержит:
- по меньшей мере один из IR-датчика для получения информации температуры целевой поверхности дороги или видеодатчика для получения информации изображений целевой поверхности дороги, и
- по меньшей мере один процессор выполнен с возможностью определения типа целевой поверхности дороги дополнительно на основе информации температуры или информации изображений.
9. Способ классификации поверхности дороги с использованием звукового сигнала, выполняемого посредством электронного устройства, при этом способ содержит этапы, на которых:
- передают звуковой сигнал к целевой поверхности дороги, удалённой от электронного устройства на первое расстояние;
- принимают сигнал отражения звукового сигнала для целевой поверхности дороги;
- получают информацию состояния атмосферы, связанную со звуковым сигналом;
- получают первые данные для принимаемого отраженного сигнала;
- формируют вторые данные посредством коррекции первых данных на основе информации состояния атмосферы;
- получают третьи данные, связанные с информацией частотной области вторых данных, на основе вторых данных; и
- определяют тип целевой поверхности дороги на основе третьих данных и искусственной нейронной сети классификации поверхностей дороги, и
- при этом искусственная нейронная сеть классификации поверхностей дороги обучается в качестве набора данных частотной области, сформированного на основе звукового сигнала, отражаемого от поверхности дороги на второе расстояние, отличающееся от первого расстояния.
10. Способ по п. 9, в котором формирование вторых данных дополнительно содержит этап, на котором корректируют первые данные, скорректированные на основе информации состояния атмосферы, на основе первого расстояния.
11. Способ по п. 9, дополнительно содержащий этап, на котором оценивают первое расстояние на основе времени передачи звукового сигнала и времени приема отраженного сигнала.
12. Способ по п. 9, в котором третьи данные получаются посредством преобразования вторых данных в STFT (кратковременное преобразование Фурье).
13. Способ по п. 9, дополнительно содержащий этап, на котором:
- формируют сигнал для управления устройством обслуживания поверхности дороги, установленным на целевой поверхности дороги, на основе определенного типа целевой поверхности дороги, и
- при этом устройство обслуживания поверхности дороги содержит устройство с нагревательной проволокой или устройство-распылитель соляного раствора.
14. Способ по п. 13,
- в котором формирование сигнала для управления устройством обслуживания поверхности дороги содержит этапы, на которых:
- определяют, выполнены ли предварительно установленные погодные условия;
- когда предварительно установленные погодные условия удовлетворяются, определяют, изменяется ли тип целевой поверхности дороги, определенный в первое время, во второе время,
- когда первый класс, определенный в первое время в качестве типа целевой поверхности дороги, и второй класс, определенный во второе время в качестве типа целевой поверхности дороги, отличаются, определяют необходимость формировать сигнал для управления устройством, установленным на целевой поверхности дороги, на основе типа целевой поверхности дороги, определенного в третье время.
15. Способ по п. 9, в котором определение типа целевой поверхности дороги содержит этап, на котором:
- определяют тип целевой поверхности дороги дополнительно на основе информации температуры целевой поверхности дороги или информации изображений целевой поверхности дороги,
- при этом тип целевой поверхности дороги определяется в каждом первом периоде, и
- тип целевой поверхности дороги определяется в каждом втором периоде, когда тип целевой поверхности дороги определяется в качестве первого класса.
| Способ регенерирования сульфо-кислот, употребленных при гидролизе жиров | 1924 |
|
SU2021A1 |
| CN 103809168 B, 17.11.2017 | |||
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
