Область техники
Группа изобретений относится к космической технике и может быть использована для трехосной безрасходной, независимой от внешних физических полей разгрузки инерциальных исполнительных органов (ИИО) космических аппаратов (КА) на любых орбитах или в далеком космосе.
Уровень техники
Большинство современных КА оборудованы активными системами ориентации корпуса КА, содержащими ИИО, в качестве которых используются управляющие двигатели-маховики (ДМ) или силовые гироскопы - гиродины. ДМ и гиродины периодически достигают состояния «насыщения» и утрачивают способность выдавать управляющий момент.У управляющих ДМ это происходит из-за достижения предельной скорости вращения, а у гиродинов из-за поворота рамок их роторов на предельный угол при парировании действующих на КА внешних возмущающих моментов. Возникает необходимость проведения разгрузки ИИО (сброса аккумулированного ими кинетического момента). Разгрузка управляющих ДМ осуществляется путем их торможения, в результате чего они восстанавливают работоспособность. Для восстановления работоспособности гиродинов, их рамки поворачивают в исходное положение. Для разгрузки ИИО используют различные способы.
Известен реактивный способ разгрузки, который предполагает одновременное использование нескольких реактивных сопел для создания разгружающего момента (Тентилов Ю.А., Фатеев А.В., Васильев А.А., Овчинников А.В./ Патент RU 2648906 C2, МПК B64G 1/28, опубл. 2018-03-28). Разгрузку управляющих ДМ в выбранном канале ориентации осуществляют по двухконтурной схеме. Первый контур реализует необходимую ориентацию КА и накапливает импульс внешнего возмущающего момента, а второй контур, с помощью реактивных двигателей, формирует момент разгрузки, который противоположен по знаку суммарному кинетическому моменту системы КА - управляющий ДМ.
Реактивному способу разгрузки ИИО свойственен существенный недостаток - необходимость, для проведения разгрузки ИИО, иметь на борту запас реактивного топлива или сжатого газа. Для околоземных орбитальных станций пополнение этого запаса ведет к значительным техническим сложностям и большим финансовым затратам, а для КА на высоких орбитах, например, ГСО, или в далеком космосе этот запас не восполним, что накладывает ограничение на время использования КА. Кроме этого, запас реактивного рабочего тела для проведения разгрузки ИИО, баки для его хранения, реактивные двигатели разгрузки, межблочные трубопроводы, клапаны, нагреватели и другая арматура ведут к увеличению массы и габаритов КА.
Известен магнитный способ разгрузки ИИО, в котором для создания внешнего разгружающего момента используется магнитное поле Земли. Например, для разгрузки гиродинов на спутниковой платформе «Ресурс - ДК» использовался магнитный способ разгрузки, с помощью которого периодически создавались разгрузочные моменты, действующие на КА в направлении, противоположном возмущающим моментам. В результате, рамки гиродинов возвращались в исходное положение. Разгружающие моменты создавались за счет взаимодействия магнитных полей магнитопроводов КА с магнитным полем Земли (В.И. Ермолаев / Спутниковая платформа «Ресурс - ДК». Учебное пособие.: СПб., 2018. - 56 с, с. 40-41).
Известен способ магнитной разгрузки двигателей-маховиков космического аппарата (Д.И. Галкин, Р.П. Симоньянц / Патент RU 2568827 C1, МПК B64G 1/32, опубл. 2015-11-20), заключающийся в том, что для проведения разгрузки, сначала КА с помощью программного поворота ориентируют таким образом, чтобы ось ДМ с меньшим накопленным кинетическим моментом совпадала с вектором магнитной индукции внешнего магнитного поля. Арретируют магнитную систему, построенную на основе постоянных магнитов или электромагнитов, и сбрасывают кинетический момент ДМ, лежащих в плоскости, перпендикулярной вектору магнитной индукции магнитного поля Земли. После сброса кинетического момента магнитную систему разарретируют и КА возвращают в опорную систему координат или переходят к разгрузке следующих ДМ.
Магнитный способ разгрузки ИИО имеет следующие недостатки:
- ограниченность применения по высоте орбиты из-за уменьшения интенсивности магнитного поля Земли с увеличением высоты над поверхностью Земли; магнитный способ разгрузки применяется на высотах 600-6000 км (Гущин В.Н./ Основы устройства космических аппаратов. Учебник для ВУЗов.: Машиностроение, 2003.-272 с, с. 251), на больших высотах магнитное поле Земли сильно ослабевает и использование его для разгрузки ИИО становится не возможным;
- ограниченность применения на участках орбиты над экваториальными областями из-за сильной неоднородности магнитного поля Земли (напряженность на магнитном экваторе в два раз ниже напряженности у магнитных полюсов);
- ослабевающее с высотой и на экваториальных участках орбиты магнитное поле Земли ведет к значительному увеличению времени, требующемуся для разгрузки ИИО; - большая длительность разгрузки ИИО вызывает большие перерывы в работе бортовой аппаратуры, т.к. при магнитном способе разгрузки рабочая ориентация К А не соблюдается.
За прототип выбран способ гравитационной разгрузки ИИО от накопленного кинетического момента. В качестве внешнего разгружающего поля используется гравитационный момент, возникающий при целенаправленном отклонении связанных осей КА относительно орбитальной системы координат. Для осуществления гравитационной разгрузки, КА должен иметь вытянутую форму. Регулирование создаваемого гравитационного момента осуществляют за счет поворотов КА в необходимое для разгрузки положение с помощью изменения кинетического момента двигателей-маховиков. Под действием внешнего момента кинетический момент ИИО уменьшается. По завершении разгрузки, КА возвращают в исходное положение. Для разгрузки гиросиловых ИИО гравитационный способ разгрузки успешно использовался на орбитальных станциях «Мир» и «Скайлэб» (В.Н. Васильев/ Системы ориентации космических аппаратов.: Москва. 2009. - 310 с, с. 266-268). К недостаткам гравитационного способа разгрузки относятся:
- необходимость соблюдать вытянутую форму КА;
- ограниченность применения гравитационного способа разгрузки высотами орбит 200 - 2000 км (Гущин В.Н./ Основы устройства космических аппаратов. Учебник для ВУЗов.: Машиностроение, 2003. -272 с, с. 246), т.к. далее гравитационное поле Земли сильно ослабевает и использование его для разгрузки ИИО становится не возможным;
- ослабевающее с высотой гравитационное поле ведет к значительному увеличению времени, требующемуся для разгрузки ИИО;
- большая длительность разгрузки ИИО вызывает большие перерывы в работе бортовой аппаратуры, т.к. при гравитационном способе разгрузки рабочая ориентация КА не соблюдается.
Целью изобретения является создание безрасходного, независимого от внешних физических полей способа трехосной разгрузки ИИО и устройства для осуществления этого способа.
Техническим результатом при использовании предлагаемой группы изобретений является:
- обеспечение возможности осуществления трехосной безрасходной разгрузки ИИО космических аппаратов на любых околоземных орбитах, на орбитах других небесных тел, а также в далеком космосе только за счет восполняемого ресурса - электроэнергии от бортовой сети электроснабжения, генерируемой солнечными батареями или бортовыми радиоизотопными генераторами;
- уменьшение длительности разгрузки ИИО за счет использования только стабильного электроснабжения от бортовой сети КА;
- уменьшение длительности вынужденных перерывов в работе бортовой аппаратуры за счет уменьшения длительности разгрузки ИИО.
Аналоги устройств для реализации заявленного способа разгрузки ИИО космического аппарата отсутствуют.
Раскрытие способа
Поставленная цель (техническая задача) решается принципиально новым и простым способом, позволяющим осуществлять трехосную безрасходную и независимую от внешних физических полей разгрузку ИИО. Сущность способа заключается в том, что разгрузку ИИО космического аппарата выполняют сбросом накопленного ими кинетического момента на ДМ, установленный в кордановом подвесе. Перед проведением разгрузки, выполняют программный поворот КА в положение, при котором вектор кинетического момента ИИО по разгружаемой оси ориентации и вектор кинетического момента ДМ коллинеарно сонаправлены или разнонаправлены. Вариант поворота КА выбирается, исходя из условия сохранения величины кинетического момента ДМ в конце текущего цикла разгрузки в рабочем диапазоне. Сброс кинетического момента управляющих ДМ космического аппарата выполняют посредством их торможения, а сброс кинетического момента гиродинов выполняют посредством поворота их рамок в исходное положение. Возникающие при этом возмущающие моменты, действующие на корпус КА, компенсируют противоположно направленным разгружающим моментом, который создают посредством изменения кинетического момента ДМ с помощью управления его электродвигателем. Разгружающий момент через шарниры рамок корданова подвеса передается на корпус КА. При сонаправленном положении векторов кинетических моментов разгрузка ИИО космического аппарата вызовет необходимость увеличения кинетического момента ДМ, а при разнонаправленном - уменьшения или изменения величины кинетического момента ДМ вместе с изменением направления его вектора на противоположное.
Раскрытие устройства
Сущность предлагаемого устройства для разгрузки ИИО космического аппарата заключается в техническом обеспечении возможности сброса накопленного ИИО кинетического момента на ДМ.
Устройство содержит модуль управления, ДМ в кордановом подвесе, датчик скорости и направления вращения ДМ, датчики угловых перемещений и электроуправляемые арретиры внутренней и внешней рамок корданова подвеса. ДМ вместе с кордановым подвесом образуют трехстепенной астатический гироскоп с электроуправляемым ротором. Датчики обеспечивают предоставление данных о положении в пространстве оси вращения ДМ, направлении его вращения (направлении вектора кинетического момента) и скорости вращения. С помощью арретиров обеспечивается фиксация оси вращения ДМ, когда величина кинетического момента ДМ находится в зоне низких значений во время разгрузки ИИО, а также во время раскрутки ДМ после выведения КА в космос.Датчики, арретиры и электромотор ДМ подключены к модулю управления. Внешняя рамка корданова подвеса установлена в корпусе КА так, что ось ее вращения не параллельна ни одной из осей ориентации в связанной системе координат КА. Это, при выполнении разгрузки ИИО, исключает наступление события «складывание рамок», которое наступает, когда вектор кинетического момента гироскопа (ДМ) направлен по оси вращения наружной рамки. При таком положении гироскоп теряет свойство сохранять направление в инерциальном пространстве, которое задается вектором кинетического момента. Непараллельная установка оси вращения внешней рамки корданова подвеса осям ориентации КА делает не возможным совмещение оси вращения внешней рамки с вектором кинетического момента ДМ при разгрузке ИИО, так как при выполнении разгрузки вектор кинетического момента ДМ и разгружаемая ось ориентации КА приводятся в параллельное положение.
Устройство может быть размещено в любом месте на борту КА, так как для создания ДМ момента относительно произвольной оси КА необходимо обеспечить только параллельность оси вращения ДМ с этой осью.
Графические иллюстрации
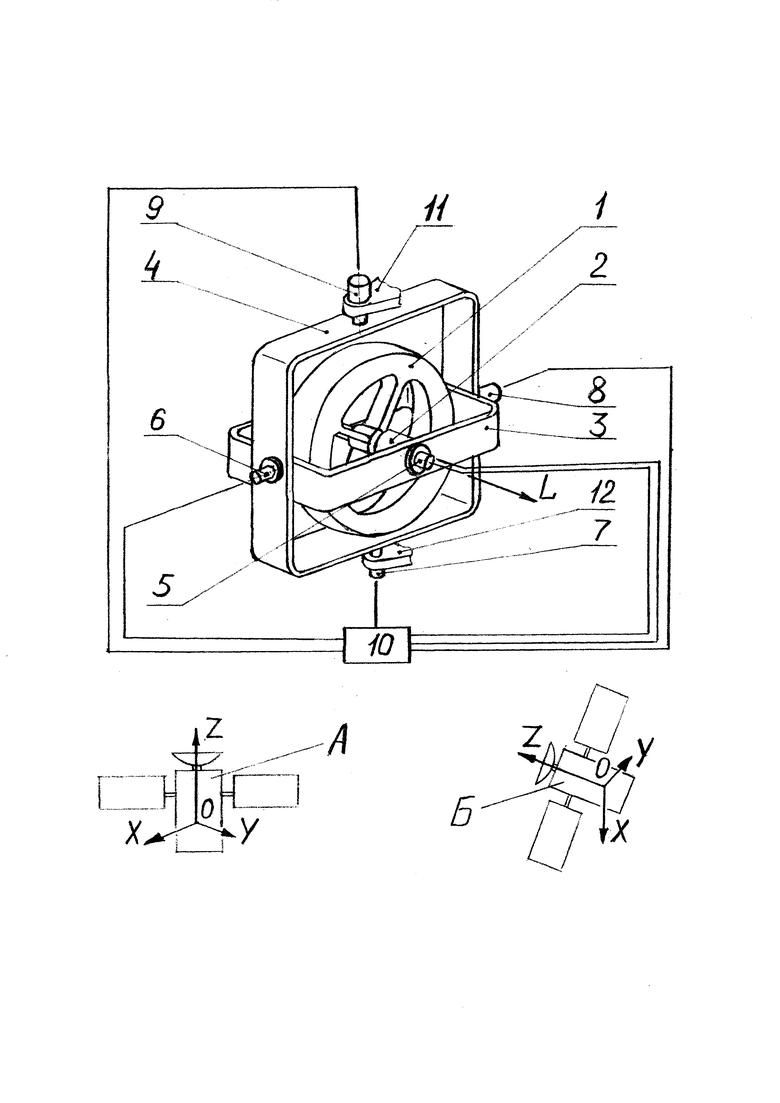
Новый заявленный способ разгрузки ИИО космического аппарата, конструкция и функционирование устройства, реализующего способ, поясняется чертежом, на котором схематически изображен КА в двух пространственных положениях. Положение «А» соответствует произвольному рабочему положению КА в момент, когда величина накопленного ИИО кинетического момента по одной из осей ориентации достигает критической величины. Положение «Б» соответствует положению КА для разгрузки ИИО по этой оси ориентации. Положение рамок корданова подвеса в обоих случаях условно показано в одном и том же положении.
Осуществление способа
Заявленный способ разгрузки ИИО космического аппарата осуществляется следующим образом. При достижении критической величины накопленного кинетического момента ИИО по одной из осей ориентации КА, включают модуль управления устройства для разгрузки ИИО, и с помощью датчиков угловых перемещений внутренней и внешней рамок корданова подвеса получают данные о положении оси вращения ДМ. Вместе с этим, с помощью датчика скорости и направления вращения получают информацию о скорости и направлении вращения ДМ. Эти данные передают в бортовую систему управления КА для формирования управляющих сигналов на электромоторы ИИО космического аппарата, с помощью которых выполняют программный поворот КА в положение для разгрузки ИИО. В этом положении вектор кинетического момента ДМ и вектор кинетического момента ИИО по разгружаемой оси ориентации сонаправлено или разнонаправлено коллинеарны. Во время поворота КА, ось вращения ДМ сохраняет свое положение в пространстве. Перед выполнением программного поворота, бортовая система управления КА рассчитывает оптимальный вариант поворота с учетом получения необходимой направленности векторов кинетических моментов ДМ и ИИО по разгружаемой оси ориентации, а также с учетом величины подлежащего сбросу кинетического момента, с целью сохранения в конце цикла разгрузки частоты вращения ДМ в рабочем диапазоне. Для выполнения программного поворота задействуются все, кроме находящихся в холодном резерве, ИИО космического аппарата, в том числе подлежащие разгрузке. Поэтому критический уровень кинетического момента ИИО по всем осям ориентации принимают меньшим предельно допустимого, с целью иметь резерв кинетического момента для выполнения программного поворота. Если ожидается, что в процессе очередного цикла разгрузки частота вращения ДМ будет достигать малых величин, то для предотвращения возможного изменения положения оси вращения ДМ, внутреннюю и внешнюю рамки корданова подвеса перед началом разгрузки ИИО арретиру ют. Затем выполняют сброс накопленного ИИО кинетического момента на ДМ. Если разгружаются управляющие ДМ космического аппарата, то их тормозят, если разгружаются гиросиловые ИИО, например, спаренные гиродины с параллельными осями прецессии, то их рамки поворачивают в исходное положение. Возникающий при этом возмущающий момент компенсируют противоположно направленным моментом, создаваемым ДМ по командам модуля управления. Разгрузка завершена. Электродвигатель ДМ обесточивают, ротор ДМ свободно вращается. Рамки корданова подвеса разарретируют, если они были арретированы, модуль управления выключают. КА возвращают в рабочую ориентацию или приступают к разгрузке ИИО по следующей оси ориентации.
В процессе выполнения программного поворота КА в положение для разгрузки, ДМ в кордановом подвесе может проходить через положение, в котором наступает событие «складывание рамок». В этом положении ось вращения ДМ может не сохранять своего устойчивого положения в пространстве. «Складывание рамок» может быть исключено алгоритмом выполнении программного поворота в положение для разгрузки. Если положение «складывание рамок» все же создается, то после прохождения этого положения, с помощью датчиков угловых перемещений внутренней и внешней рамок корданова подвеса, уточняют сохранил ли ДМ свое положение в пространстве. Эти данные передают в бортовую систему управления КА, которая, в случае необходимости, рассчитывает и выполняет доворот КА в точное положение для разгрузки. При маневрировании КА во время выполнения программы полета, прохождение через положение «складывание рамок» ДМ в кордановом подвесе допустимо и не влияет на последующие циклы разгрузки ИИО, так как исходное положение оси вращения ДМ относительно осей ориентации КА, перед началом поворота КА в положение для разгрузки, безразлично.
Перед выведением КА в космос, рамки корданова подвеса арретируют в исходном положении. После выведения и успокоения КА, раскручивают ДМ до достижения минимально необходимой частоты вращения. Действующий при этом на КА возмущающий момент парируется ИИО космического аппарата по всем осям ориентации. Затем рамки корданова подвеса разарретируют. Далее выполняют действия описанным выше способом.
Осуществление устройства
Устройство для разгрузки ИИО космического аппарата содержит:
- ДМ, включающий ротор 1 и электродвигатель 2;
- корданов подвес, включающий внутреннюю рамку 3 и внешнюю рамку 4;
- датчик скорости и направления вращения 5 ротора ДМ;
- датчик угловых перемещений 6 внутренней рамки;
- датчик угловых перемещений 7 внешней рамки;
- электроуправляемый арретир 8 внутренней рамки;
- электроуправляемый арретир 9 внешней рамки;
- модуль управления 10.
ДМ шарнирно установлен во внутренней рамке 3 корданова подвеса с возможностью свободного вращения ротора 1. Внешняя рамка 4 корданова подвеса шарнирно установлена в корпусных элементах 11 и 12 КА, при этом ось ее вращения не параллельна осям ориентации OX, OY, и OZ в связанной системе координат КА. Датчик скорости и направления вращения 5 ДМ установлен на внутренней рамке 3. Датчик угловых перемещений 6 внутренней рамки и электроуправляемый арретир 8 внутренней рамки установлены на внешней рамке 4 корданова подвеса. Датчик угловых перемещений 7 внешней рамки и электроуправляемый арретир 9 внешней рамки установлены на корпусных элементах 11 и 12 КА. Датчики 5, 6, 7, электроуправляемые арретиры 8, 9 и электродвигатель 2 ДМ подключены к модулю управления 10.
Устройство обладает высокой надежностью, благодаря простоте его конструкции с малым количеством составных частей, технология изготовления и применение которых в космической технике хорошо отработаны в течение нескольких последних десятилетий. В качестве датчика скорости и направления вращения ротора ДМ может быть использован оптический инкрементальный энкодер. В качестве датчиков угловых перемещений внутренней и внешней рамок корданова подвеса могут быть использованы оптические абсолютные энкодеры, которые в любой момент времени с высокой точностью определяют угловое отклонение от исходного положения.
Устройство для разгрузки ИИО космического аппарата функционирует следующим образом. Перед выведением КА в космос на арретиры 8 и 9 подается управляющий электрический сигнал, и внутренняя и внешняя рамки 3 и 4 корданова подвеса арретируются в исходном положении. После выведения и успокоения КА, выполняется раскрутка ротора 1 ДМ, для чего включается модуль управления 10, через который на электродвигатель 2 ДМ подается управляющее электропитание. Частота вращения ротора 1 плавно увеличивается. Действующий при этом на корпус КА возмущающий момент компенсируется изменением кинетического момента ИИО космического аппарата. При достижении ротором 1 ДМ необходимой частоты вращения, электродвигатель 2 ДМ обесточивается. Ротор 1 ДМ свободно вращается. На арретиры 8 и 9 подается управляющий электрический сигнал, и рамки 3 и 4 корданова подвеса разарретируются. Модуль управления 10 выключается. КА приступает к выполнению программы полета. ИИО космического аппарата накапливают кинетический момент. При достижении ИИО по одной из осей ориентации КА критической величины кинетического момента, например, по оси OZ, космический аппарат находится в некотором пространственном положении «А». Включается модуль управления 10, который от датчиков 5, 6 и 7 получает данные о скорости и направлении вращения ротора 1 ДМ и о положении в пространстве оси его вращения. Эти данные передаются в бортовую систему управления КА, которая рассчитывает программный поворот КА в положение «Б» для разгрузки ИИО по оси ориентации OZ космического аппарата, и формирует команды на электродвигатели ИИО для выполнения программного поворота. В положении «Б» вектор кинетического момента ИИО по оси OZ космического аппарата, и вектор L кинетического момента ротора 1 ДМ коллинеарно сонаправлены или разнонамравлены. После завершения поворота в положение для разгрузки, модуль управления 10, в случае необходимости, подает управляющие сигналы на арретиры 8 и 9 для фиксации рамок 3 и 4 корданова подвеса. Система управления КА осуществляет разгрузку ИИО торможением управляющих ДМ или поворотом рамок гиродинов в исходное положение. При этом возникает возмущающий момент относительно оси OZ космического аппарата. Этот момент парируется противоположно направленным моментом, создаваемым электродвигателем 2 ДМ, в результате чего изменяется кинетический момент ротора 1 ДМ. По завершении разгрузки, электродвигатель 2 ДМ обесточивается, рамки 3 и 4 корданова подвеса разарретируются, если были арретированы, модуль управления 10 выключается. Ротор 1 ДМ свободно вращается. В результате разгрузки ИИО, кинетический момент ДМ увеличится, если вектор кинетического момента ИИО по разгружаемой оси ориентации был коллинеарно сонаправлен с вектором кинетического момента ДМ. Кинетический момент ДМ уменьшится или изменится вместе с изменением его направления на противоположное, если перед началом разгрузки вектор кинетического момента ИИО по разгружаемой оси ориентации и вектор кинетического момента ДМ были коллинеарно разнонаправлены.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ разгрузки инерциальных исполнительных органов космического аппарата и устройство для реализации способа | 2023 |
|
RU2829196C1 |
| Способ динамичной высокоточной ориентации и стабилизации космического аппарата | 2018 |
|
RU2702932C1 |
| СПОСОБ МАГНИТНОЙ РАЗГРУЗКИ ДВИГАТЕЛЕЙ-МАХОВИКОВ КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2568827C1 |
| СПОСОБ МАГНИТНОЙ РАЗГРУЗКИ ИНЕРЦИОННЫХ ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2070148C1 |
| Способ управления движением космического аппарата с управляемой ориентацией | 2020 |
|
RU2767648C1 |
| Способ управления космическим аппаратом дистанционного зондирования Земли | 2019 |
|
RU2722598C1 |
| Устройство сброса кинетического момента и управления ориентацией космического аппарата с использованием магнитной системы | 2022 |
|
RU2797430C1 |
| МНОГОРОТОРНОЕ ГИРОСКОПИЧЕСКОЕ УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ ПОЛОЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА | 2009 |
|
RU2403190C1 |
| Способ ориентации космического аппарата и устройство для реализации способа | 2016 |
|
RU2618664C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИНЕРЦИОННЫХ ХАРАКТЕРИСТИК КОСМИЧЕСКОГО АППАРАТА В ПРОЦЕССЕ УПРАВЛЕНИЯ С ПОМОЩЬЮ СИЛОВЫХ ГИРОСКОПОВ И РЕАКТИВНЫХ ДВИГАТЕЛЕЙ | 2001 |
|
RU2208559C1 |
Группа изобретений относится к области космической техники и может быть использована для трехосной безрасходной, независимой от внешних физических полей разгрузки инерциальных исполнительных органов. Разгрузку выполняют сбросом кинетического момента на установленный в кардановом подвесе двигатель-маховик. Поворот космического аппарата перед сбросом кинетического момента осуществляют в положение, при котором вектор кинетического момента инерциальных исполнительных органов по разгружаемой оси ориентации и вектор кинетического момента двигателя-маховика коллинеарны. Устройство для разгрузки содержит модуль управления и подключенный к нему двигатель-маховик в кардановом подвесе, внешняя рамка которого установлена в корпусе космического аппарата таким образом, что ось ее вращения не параллельна ни одной из осей ориентации космического аппарата. Устройство содержит датчик скорости и направления вращения двигателя-маховика, а также датчики угловых перемещений и электроуправляемые арретиры внутренней и внешней рамок карданова подвеса. Достигается возможность безрасходной разгрузки на любых орбитах и в далеком космосе, сокращается длительность разгрузки и вынужденных перерывов в работе. 2 н.п. ф-лы, 1 ил.
1. Способ разгрузки инерциальных исполнительных органов космического аппарата, включающий поворот космического аппарата в положение для разгрузки и сброс накопленного кинетического момента, отличающийся тем, что кинетический момент сбрасывают на установленный в кардановом подвесе двигатель-маховик, а поворот космического аппарата перед сбросом кинетического момента осуществляют в положение, при котором вектор кинетического момента инерциальных исполнительных органов по разгружаемой оси ориентации и вектор кинетического момента двигателя-маховика коллинеарны.
2. Устройство для реализации способа по п. 1, включающее модуль управления и подключенные к нему двигатель-маховик для сброса на него накопленного кинетического момента в кардановом подвесе, внешняя рамка которого установлена в корпусе космического аппарата таким образом, что ось ее вращения не параллельна ни одной из осей ориентации космического аппарата, датчик скорости и направления вращения двигателя-маховика, а также датчики угловых перемещений и электроуправляемые арретиры внутренней и внешней рамок карданова подвеса.
| Способ управления космическим аппаратом дистанционного зондирования Земли | 2019 |
|
RU2722598C1 |
| СПОСОБ МАГНИТНОЙ РАЗГРУЗКИ ДВИГАТЕЛЕЙ-МАХОВИКОВ КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2568827C1 |
| Устройство сброса кинетического момента и управления ориентацией космического аппарата с использованием магнитной системы | 2022 |
|
RU2797430C1 |
| СПОСОБ УПРАВЛЕНИЯ РАЗМЕЩЕННОЙ ПРЕИМУЩЕСТВЕННО НА КОСМИЧЕСКОМ АППАРАТЕ ПЕРЕНОСНОЙ АППАРАТУРОЙ НАБЛЮДЕНИЯ НА ДВУХСТЕПЕННОЙ ПОВОРОТНОЙ ПЛАТФОРМЕ | 2021 |
|
RU2787277C1 |
| CN 103274058 B, 27.05.2015. | |||

