Область техники
Изобретение относится к радиолокационной технике, а именно к способам построения распределенных радиолокационных станций (РЛС), принципам активных фазированных антенных решеток (АФАР) и может быть использовано для построения системы IoT для организации мониторинга и контроля воздушного пространства
Уровень техники
Известен способ построения радиолокационных станций (РЛС) [1 - Патент РФ №2021112939 «СПОСОБ МНОГОПОЗИЦИОННОЙ РАДИОЛОКАЦИИ», МПК G01S 13/00, G01S 13/78, опубл. 22.04.2022 г.], техническим результатом которого является возможность обзора пространства путем электронного сканирования ДН и улучшение пространственной селекции обнаруживаемых объектов за счет использования активных фазированных антенных решеток. Согласно способу выполняется излучение радиолокационных сигналов и прием отраженных сигналов аппаратурой разнесенных позиций, выполняется обнаружение объектов, измерение их координат, определение параметров траекторий. При этом производится объединение и совместная обработка информации, получаемой от аппаратуры разнесенных позиций в пункте обработки информации, выполняется корректировка сопоставления информации, полученной от аппаратуры разных разнесенных позиций. Обнаружение объектов, измерение их координат и определение параметров траекторий выполняется аппаратурой разнесенных позиций, в качестве антенных систем которых используют активные фазированные антенные решетки (АФАР). Для классификации воздушных объектов используют информацию от системы государственного опознавания с АФАР и аппаратуры автоматического зависимого наблюдения.
Известен способ радиолокационного обзора пространства [2 - Патент РФ №2667485 «Способ радиолокационного обзора пространства и многопозиционный комплекс для его осуществления», MIIKG01S 13/04, опубл. 20.09.2018 г.], заключающийся в подсветке пространства с помощью m≥2 передающих модулей (ПМ), приеме отраженных сигналов с помощью n≥2 приемных модулей (ПрМ), определении пеленгов на цель и передаче их на центр обработки информации и управления (ЦОУ), отличающийся тем, что обзор пространства осуществляется с помощью передающих узкополосных модулей (ПМу) и приемных узкополосных модулей (ПрМу). При обнаружении признаков движущейся цели определяется пеленг на нее, измеряется ее доплеровская скорость, передается информация на ЦОУ с помощью широкополосных передающих модулей (ПМш) и приемных широкополосных модулей (ПрМш) и по данным ЦОУ осматриваются пеленги только в направлениях, где обнаружены признаки движущейся цели.
Известен способ многопозиционной радиолокации, реализованный в многопозиционной радиолокационной системе [3 - Бакулев П. А. Радиолокационные системы. М.: Радиотехника, 2004, стр. 21], заключающийся в излучении радиолокационных сигналов, синхронизированном приеме отраженных сигналов аппаратурой разнесенных позиций, объединении и совместной обработке сигналов и информации разнесенных позиций в пункте обработки информации для обнаружения целей, измерения их координат, определения параметров траекторий и последующего отождествления.
Вышеперечисленные способы используют многопозиционную радиолокационную схему и синхронизацию приема отраженных сигналов не используя синхронизацию передающих сигналов для сложения мощностей ПМ и формирования общей ДН и сканирования, как это реализовано в принципах АФАР.
Известны способы формирования ДН АФАР [4], а также устройства, в которых реализованы указанные способы [5-9]. Недостатки перечисленных способов состоят в том, что они пригодны для формирования ДН АФАР с расстоянием между элементами решетки сопоставимой с длиной волны. В нашем случае элементы приемо-передающих модулей (ППМ) располагаются на расстоянии много превышающее длину волны.
Технической проблемой, на решение которой направлено предполагаемое изобретение, является увеличение усиления зондирующего сигнала радара без увеличения мощности передающих модулей, что позволяет использование системы в местах городской застройки и вдоль автомобильных и железнодорожных путей с соблюдением санитарных требований. Реализация такой системы совместно с другими системами контроля позволит обеспечить внешний мониторинг и контроль воздушного пространства для защиты от противоправного использования беспилотных летательных аппаратов (БПЛА) и развитию использования сервисов БПЛА в условиях городской застройки.
Раскрытие сущности изобретения
Элементы ППМ располагаются на существующей телекоммуникационной инфраструктуре (вышки связи, мачты телекоммуникационного оборудования и т.д.) на расстоянии во много раз превышающую длину волны и образуют, с одной стороны, многопозиционную сеть РЛС, а с другой стороны, являются частью платформы IoT, которая управляет группами близ расположенных элементов ППМ, группа которых образует при этом активную фазовую антенную решетку. Каждый ППМ оснащается модулем позиционирования, информация от которого используется для грубой привязки к карте и формирования групп сканирования. Выбранная группа элементов используется для формирования узконаправленного луча для сканирования воздушного пространства. Формирование ДН происходит следующим образом: выделяется группа IoT элементов; синхронизируются электронно-вычислительные процессоры этой группы; подается управляющий сигнал, который управляет фазой и мощностью ППМ каждого элемента IoT системы по принципам АФАР. Маска весовых коэффициентов разницы амплитуд и фаз для каждой группы рассчитывается исходя из местоположения элементов ППМ, корректируемая методом обратного пеленга для получения максимального значения суммирования мощностей от каждого элемента. (Расчет весовых коэффициентов маски является know how и на данном этапе не подлежит раскрытию). После формирования узконаправленного луча происходит сканирование воздушного пространства. Отраженные сигналы суммируются как с использованием весовых коэффициентов маски, так и синхронизированном приеме отраженных сигналов аппаратурой разнесенных позиций и совместной обработке сигналов в пункте обработки информации для обнаружения целей, измерения их координат, определения параметров траекторий, последующей классификации и передачи данных в центр мониторинга и контроля воздушного пространства.
Осуществление изобретения
Техническая реализация подтверждается теоретическими расчетами и математическим моделированием системы. Для анализа и расчета использовалась программная среда MATLAB со специализированными программными расширениями для расчета фазированных антенных решеток (Phased Array System Toolbox) и радиолокационных систем (Radar Toolbox).
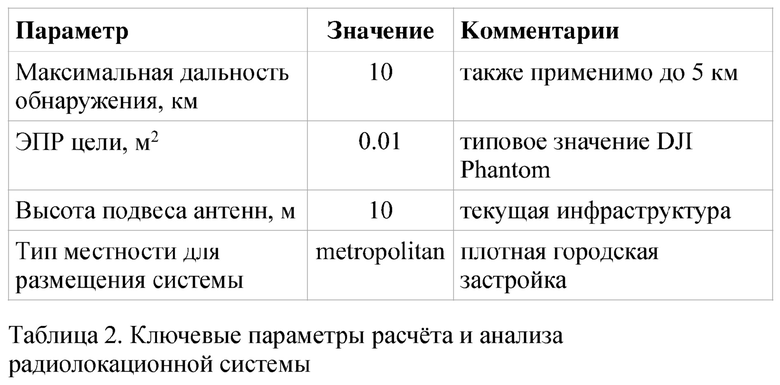
В качестве инструмента анализа антенной решетки использовалось приложение Sensor Array Analyzer из состава Phased Array System Toolbox. Основные параметры расчета были установлены в соответствии с Таблицей 1. В качестве дополнительных опций было применено неравномерное амплитудное распределение на элементах решетки (оконная функция Тейлора). Геометрия и параметры антенной решетки приведены на фигуре 1. Расчет подтвердил, что выбранная конфигурация позволяет получать усиление антенной решетки на уровне 37 дБи с шириной луча (главного лепестка ДНА) не более 5 градусов. Рассчитанная диаграмма направленности антенной решетки приведена на фигуре 2.
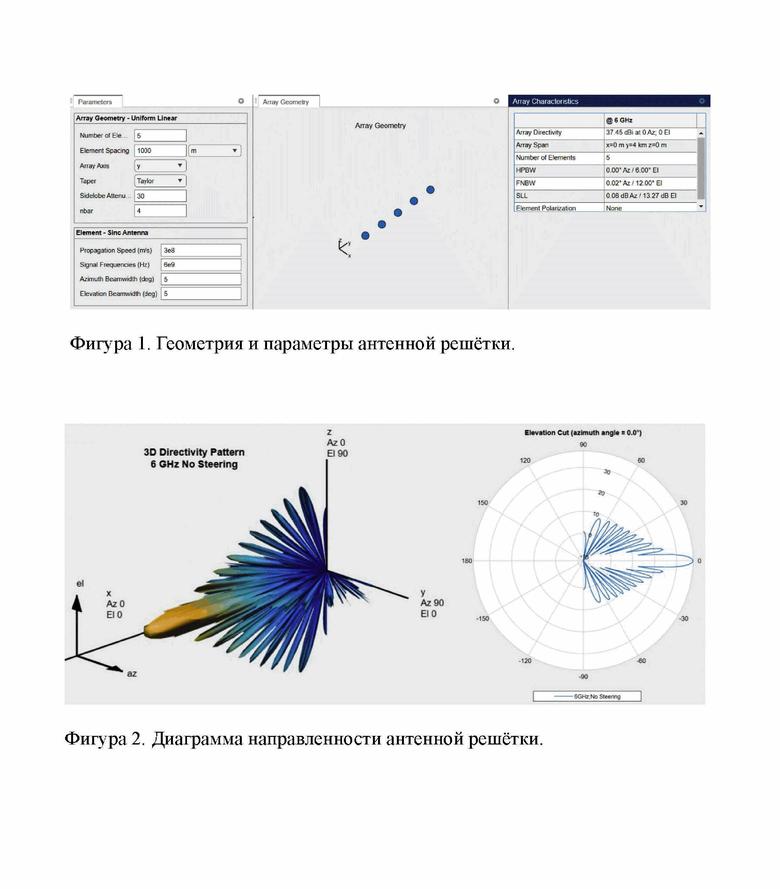
В качестве инструмента расчета радиолокационной системы использовалось приложение Radar Designer из состава Radar Toolbox. Основные параметры расчета были установлены в соответствии с Таблицей 2. В качестве дополнительных параметров были установлены следующие характеристики системы и сценария расчета:
Тип радарной системы - следящая
Длительность зондирующего импульса - 1 мс
Частота повторения зондирующих импульсов - 1 кГц
Вероятность ложной тревоги - 1е-6
Когерентное накопление 10 импульсов
Тип детектора - CFAR
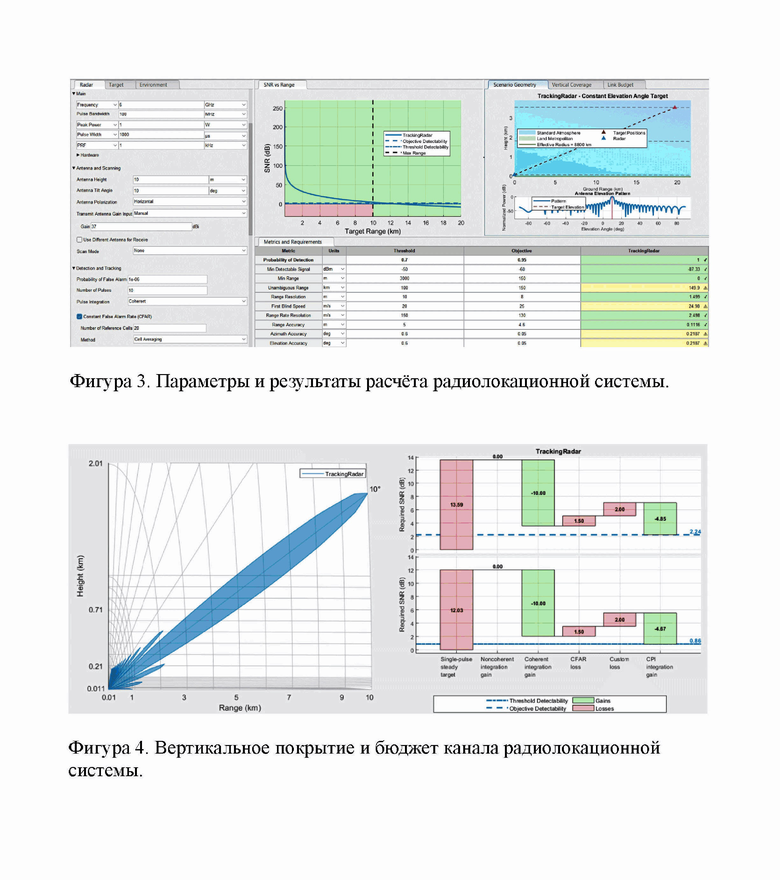
Результаты расчета подтверждают потенциальное обнаружение малоразмерной цели с указанными параметрами и выбранным типом антенной решетки (см. Фиг. 3). Энергетика приема для отраженного сигнала (без дополнительных дестабилизирующих факторов) находится на уровне -87 дБм при целевом значении в -60 дБм, что сигнализирует о хорошем запасе энергетического канала. Расчет энергетики канала и вертикальное покрытие приведены на фигуре 4.
Помимо этого, расчет демонстрирует удовлетворяющие требованиям показатели разрешающей способности системы по дальности, параметры максимальной и минимальной дальностей обнаружения, угловому разрешению.
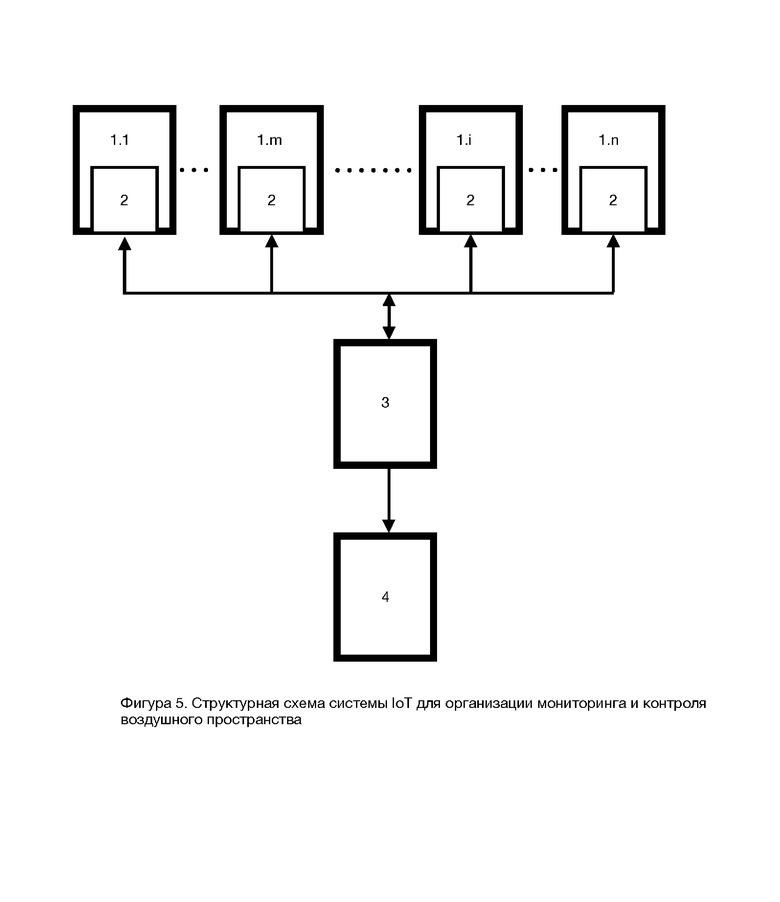
Предварительный расчет системы в MATLAB продемонстрировал потенциальную возможность реализовать описываемую систему, структурная схема которой, показана на фигуре 5.
В таблицах 1 и 2 представлены основные параметры АФАР и сигналов для расчета ДН системы.
Краткое описание чертежей
Геометрия и параметры антенной решетки приведены на фигуре 1.
Рассчитанная диаграмма направленности антенной решетки приведена на фигуре 2.
На фигуре 3 представлены результаты расчета, которые подтверждают потенциальное обнаружение малоразмерной цели с указанными параметрами и выбранным типом антенной решетки.
Расчет энергетики канала и вертикальное покрытие приведены на фигуре 4.
На фигуре 5 представлена структурная схема системы IoT для организации мониторинга и контроля воздушного пространства. Элементы ППМ (блоки 1.1-1.n) располагаются на существующей телекоммуникационной инфраструктуре (вышки связи, мачты телекоммуникационного оборудования и т.д.) на расстоянии, во много раз превышающем длину волны и образуют многопозиционную сеть РЛС, группа близ расположенных элементов ППМ (блоки 1.1-1.m) образует активную фазовую антенную решетку. Каждый ППМ (блоки 1.1-1.n) оснащается модулем позиционирования (блок 2), информация от которого используется для грубой привязки к карте и формирования групп сканирования. Выбранная группа элементов (блоки 1.1- l.m) используется для формирования узко направленно го луча для сканирования воздушного пространства. Формирование ДН происходит следующим образом: выделяется группа 1оТ элементов (блоки 1.1-l.m); из ЦОУ (блок 3) происходит синхронизация электронно-вычислительных процессоров этой группы; из ЦОУ (блок 3) подается управляющий сигнал, который управляет фазой и мощностью ППМ каждого элемента IоТ системы по принципам АФАР. Маска весовых коэффициентов разницы амплитуд и фаз для каждой группы рассчитывается в ЦОУ (блок 3) исходя из местоположения элементов ППМ, корректируемая методом обратного пеленга для получения максимального значения суммирования мощностей от каждого элемента. После формирования узконаправленного луча происходит сканирование воздушного пространства. Отраженные сигналы суммируются как с использованием весовых коэффициентов маски, так и синхронизированном приеме отраженных сигналов аппаратурой разнесенных позиций и совместной обработке сигналов в ЦОУ (блок 3) для обнаружения целей, измерения их координат, определения параметров траекторий, последующей классификации и передачи данных в центр мониторинга и контроля воздушного пространства (блок 4).
1. Патент РФ №2021112939 «СПОСОБ МНОГОПОЗИЦИОННОЙ РАДИОЛОКАЦИИ», МПК G01S 13/00, G01S 13/78, опубл. 22.04.2022 г.
2. Патент РФ №2667485 «Способ радиолокационного обзора пространства и многопозиционный комплекс для его осуществления», МПК G01S 13/04, опубл. 20.09.2018 г.
3. Патент РФ №2495447, G01S 3/80. 20.05.2013. Способ формирования диаграммы направленности.
4. Патент РФ №2495449, G01S 7/26. 10.10.2013. Устройство формирования диаграммы направленности активной фазированной антенной решетки.
5. Патент РФ №2451373, H01Q 3/26. 20.05.2013. Активная фазированная антенная решетка.
6. Патент США №5943010, Н01O 3/24. 1999-08-24. Direct digital synthesizer driven other publications phased array antenna.
7. Патент США№6784837, Н01O 3/22; Н01C 3/24; Н01O 3/26. 2003-08-21. Transmit/receiver module for active phased array antenna.
8. Патент США№6441783, H01O 3/22; H01C 3/24; H01O 3/26. 2002-08-27. Circuit module for a phased array/ M. Dean.
9. Патент РФ №2644456, H01Q 3/26. 12.02.2018. Способ формирования расширенной диаграммы направленности фазированной антенной решетки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ многопозиционной радиолокации | 2021 |
|
RU2770827C1 |
| СПОСОБ ЦИФРОВОГО ФОРМИРОВАНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ АКТИВНОЙ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ ПРИ ИЗЛУЧЕНИИ И ПРИЕМЕ ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННЫХ СИГНАЛОВ | 2021 |
|
RU2773648C1 |
| СПОСОБ ЦИФРОВОГО ФОРМИРОВАНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ АКТИВНОЙ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЁТКИ ПРИ ИЗЛУЧЕНИИ И ПРИЕМЕ ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННЫХ СИГНАЛОВ | 2020 |
|
RU2732803C1 |
| ЦИФРОВОЙ ПРИЁМНО-ПЕРЕДАЮЩИЙ МОДУЛЬ АКТИВНОЙ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЁТКИ | 2021 |
|
RU2781038C1 |
| Способ обзора воздушного пространства радиолокационной станцией с активной фазированной антенной решеткой | 2016 |
|
RU2623579C1 |
| ДИРИЖАБЛЬ ДАЛЬНЕГО РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ | 2015 |
|
RU2604914C2 |
| Способ управления лучом в активной фазированной антенной решетке | 2023 |
|
RU2805384C1 |
| КОРОТКОИМПУЛЬСНЫЙ РАДИОЛОКАТОР С ЭЛЕКТРОННЫМ СКАНИРОВАНИЕМ В ДВУХ ПЛОСКОСТЯХ И С ВЫСОКОТОЧНЫМ ИЗМЕРЕНИЕМ КООРДИНАТ И СКОРОСТИ ОБЪЕКТОВ | 2014 |
|
RU2546999C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С НЕПРЕРЫВНЫМ ИЗЛУЧЕНИЕМ ШИРОКОПОЛОСНОГО ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННОГО СИГНАЛА ПРИ ШИРОКОУГОЛЬНОМ ЭЛЕКТРОННОМ СКАНИРОВАНИИ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ | 2021 |
|
RU2774156C1 |
| АВТОДИННЫЙ ФОТОДЕТЕКТОРНЫЙ ПРИЕМОПЕРЕДАТЧИК ДЛЯ СИСТЕМ БЛИЖНЕЙ РАДИОЛОКАЦИИ | 2023 |
|
RU2824039C1 |
Изобретение относится к радиолокационной технике, а именно к способам построения распределенных радиолокационных станций (РЛС), принципам активных фазированных антенных решеток (АФАР), и может быть использовано для построения системы IoT для организации мониторинга и контроля воздушного пространства. В заявленном способе элементы ППМ располагают на существующей телекоммуникационной инфраструктуре (вышки связи, мачты телекоммуникационного оборудования и т.д.) на расстоянии, во много раз превышающем длину волны, и образуют, с одной стороны, многопозиционную сеть РЛС, а с другой стороны, являются частью платформы IoT, которая управляет группами близ расположенных элементов ППМ, группа которых образует при этом активную фазовую антенную решетку. Каждый ППМ оснащается модулем позиционирования, информация от которого используется для грубой привязки к карте и формирования групп сканирования. Выбранная группа элементов используется для формирования узконаправленного луча для сканирования воздушного пространства. Технический результат: усиление зондирующего сигнала радара без увеличения мощности передающих модулей, что позволяет использование системы в местах городской застройки и вдоль автомобильных и железнодорожных путей с соблюдением санитарных требований. Реализация такой системы совместно с другими системами контроля позволит обеспечить внешний мониторинг и контроль воздушного пространства для защиты от противоправного использования беспилотных летательных аппаратов (БПЛА) и развитие использования сервисов БПЛА в условиях городской застройки. 5 ил., 2 табл.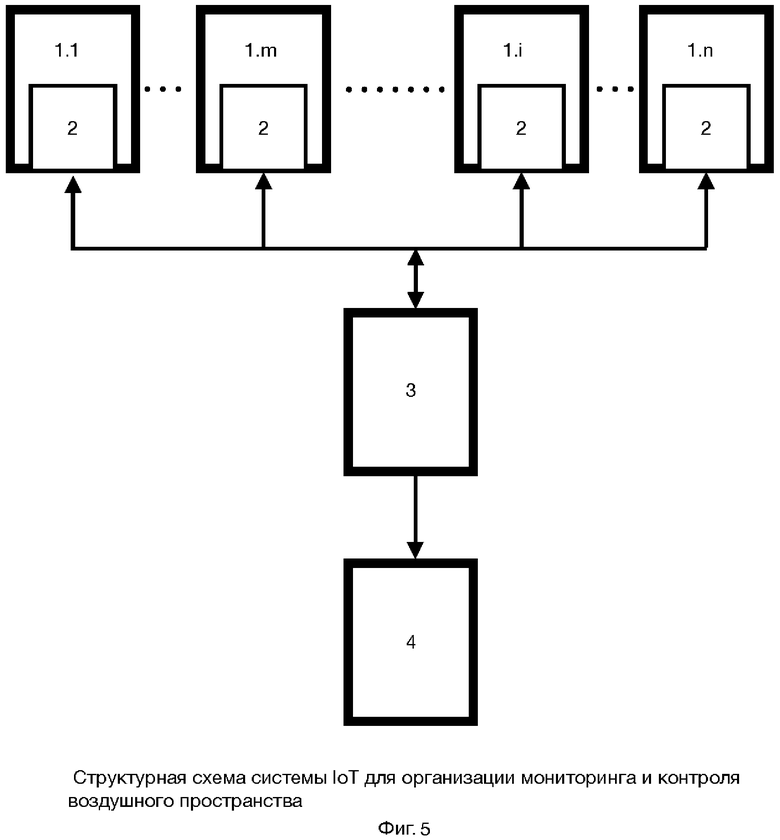
Способ построения системы IoT для организации мониторинга и контроля воздушного пространства путем использования элементов IoT, расположенных на существующей телекоммуникационной инфраструктуре, такой как вышки связи, мачты телекоммуникационного оборудования, на расстоянии, во много раз превышающем длину волны, и образующих многопозиционную сеть РЛС с возможностью формирования групп, которые образуют группу активных фазовых антенных решеток, где каждый элемент ППМ оснащается модулем позиционирования, информация от которого используется для грубой привязки к карте и формирования групп сканирования; формирование ДН происходит путем синхронизации электронно-вычислительных процессоров этой группы, подачей управляющего сигнала, который управляет фазой и мощностью ППМ каждого элемента IoT системы по принципам АФАР, где маска весовых коэффициентов разницы амплитуд и фаз для каждой группы рассчитывается исходя из местоположения элементов ППМ, корректируемая методом обратного пеленга для получения максимального значения суммирования мощностей от каждого элемента, после формирования узконаправленного луча происходит сканирование воздушного пространства, при этом отраженные сигналы суммируются как с использованием весовых коэффициентов маски, так и синхронизированного приема отраженных сигналов аппаратурой разнесенных позиций и совместной обработки сигналов в пункте обработки информации для обнаружения целей, измерения их координат, определения параметров траекторий, последующей классификации и передачи данных в центр мониторинга и контроля воздушного пространства.
| US 11196478 B1, 07.12.2021 | |||
| US 9774497 B2, 26.09.2017 | |||
| ЦИФРОВАЯ АКТИВНАЯ ФАЗИРОВАННАЯ АНТЕННАЯ РЕШЕТКА | 2015 |
|
RU2608637C1 |
| ЦИФРОВАЯ АКТИВНАЯ ФАЗИРОВАННАЯ АНТЕННАЯ РЕШЕТКА | 2015 |
|
RU2617457C1 |
| KR 101661861 B1, 30.09.2016. | |||

