Изобретение относится к радиолокационной технике, а именно, к способам построения радиолокационных станций (РЛС) и может быть использовано для построения многопозиционной РЛС различного назначения, например, управления воздушным движением.
Известен способ обнаружения и определения координат и параметров цели в многопозиционной радиолокационной станции [1 - Патент РФ №2330306 «Способ обнаружения и определения координат и параметров цели в многопозиционной радиолокационной системе», МПК G01S 5/04, опубл. 27.07.2008 г.], заключающийся в том, что определяют координаты каждого пункта приема многопозиционной радиолокационной станции (МПРЛС), производят объединение радиолокационной информации, поступившей на различные пункты приема, отождествление данных и идентификацию цели, осуществляют привязку каждого пункта приема к направлению на север, а также синхронизацию их часов с эталоном точного времени, задают координаты условного центра МПРЛС. Определяют координаты каждого пункта приема относительно выбранного условного центра, осуществляют управление системы вращения антенн каждого из пунктов приема таким образом, чтобы обеспечить наведение антенн в одну точку, находящуюся на заданном направлении от условного центра - радиусе обзора - и перемещающуюся с заданной угловой скоростью - скоростью обзора, в каждом пункте приема осуществляют прием, обработку и измерение параметров сигнала, определяют направление и время поступления сигнала, передают полученную информацию в главную управляющую персональную электронно-вычислительную машину (ПЭВМ), при помощи которой выполняют объединение данных и отождествление параметров, производят обнаружение и идентификацию одиночной или групповой цели по сигналам, поступившим в интервале времени между приемами сигнала первым и последним пунктом приема, определяют координаты и траекторию цели, кроме того, в главной ПЭВМ в соответствии с предварительными данными радиолокационной обстановки задают МПРЛС начальный радиус и скорость обзора, с возможностью их коррекции, а также значение угла обзора в начальный момент времени и передают эти значения через систему передачи данных в управляющие ПЭВМ каждого пункта приема.
К недостаткам известного способа [1] следует отнести:
- использование механического наведения антенн в пунктах приема. При этом выполняется управление системой вращения антенн каждого из пунктов приема таким образом, чтобы обеспечить наведение антенн в одну точку, находящуюся на заданном направлении от условного центра МПРЛС и перемещающуюся с заданной угловой скоростью. Использование механического наведения антенн с постоянным изменением направления движения значительно снижает ресурс опорно-поворотного устройства антенны и увеличивает расходы на техническое обслуживание;
- высокие требования к пропускной способности системы передачи данных между пунктами приема и главной управляющей ПЭВМ, т.к. параметры принятых сигналов с каждого пункта передаются на ПЭВМ, которая осуществляет совместную обработку принятых сигналов, объединение данных и отождествление параметров, производит обнаружение и идентификацию одиночной или групповой цели, определяет координаты и траекторию цели.
Известен способ радиолокационного обзора пространства [2 - Патент РФ №2667485 «Способ радиолокационного обзора пространства и многопозиционный комплекс для его осуществления», МПК G01S 13/04, опубл. 20.09.2018 г.], заключающийся в подсветке пространства с помощью m≥2 передающих модулей (ПМ), приеме отраженных сигналов с помощью n≥2 приемных модулей (ПрМ), определении пеленгов на цель и передаче их на центр обработки информации и управления (ЦОУ), отличающийся тем, что обзор пространства осуществляют с помощью передающих узкополосных модулей (ПМу) и приемных узкополосных модулей (ПрМу), при обнаружении признаков движущейся цели определяют пеленг на нее, измеряют ее доплеровскую скорость, передают информацию на ЦОУ, с помощью широкополосных передающих модулей (ПМш) и приемных широкополосных модулей (ПрМш) и по данным ЦОУ осматривают пеленги только в направлениях, где обнаружены признаки движущейся цели.
Недостатком известного способа [2] является невозможность классификации воздушных объектов по государственной принадлежности, поскольку отсутствуют средства государственного опознавания.
Известен способ многопозиционной радиолокации, реализованный в многопозиционной радиолокационной системе [3 - Бакулев П.А. Радиолокационные системы. М.: Радиотехника, 2004, стр. 21], заключающийся в излучении радиолокационных сигналов, синхронизированном приеме отраженных сигналов аппаратурой разнесенных позиций, объединении и совместной обработке сигналов и информации разнесенных позиций в пункте обработки информации для обнаружения целей, измерения их координат, определения параметров траекторий и последующего отождествления.
Недостатком известного способа [3] являются высокие требования к пропускной способности системы передачи данных между аппаратурой разнесенных позиций и пунктом обработки информации, т.к. принимаемые сигналы с каждой позиции без фильтрации передаются на пункт обработки информации, где осуществляется совместная обработка принятых сигналов, определение параметров траекторий и отождествление целей.
Наиболее близким по технической сущности к изобретению является способ построения многопозиционной радиолокации [4 - Патент РФ №2332684, «Способ многопозиционной радиолокации и устройство для его осуществления», МПК G01S 13/00, опубл. 27.08.2008 г.], принятый в качестве прототипа, при котором синхронизировано излучают радиолокационные сигналы, принимают отраженные сигналы аппаратурой разнесенных позиций, объединяют и совместно обрабатывают принятые сигналы и информацию разнесенных позиций, полученной от других радиолокационных средств, в пункте обработки информации, предназначенном для обнаружения объектов, измерения их координат, определения параметров траекторий и последующего отождествления. Дополнительно аппаратурой разнесенных позиций, подключенной с помощью аппаратуры высокочастотного присоединения к линиям электропередачи (ЛЭП), осуществляют синхронизированные излучение и прием сигналов с использованием ЛЭП, затем при обработке полученной информации осуществляют корректировку информации, полученной в результате обработки сигналов, принятых с ЛЭП, посредством сопоставления ее с сигналами, отраженными от объектов, полученными аппаратурой разнесенных позиций, и с информацией, полученной аппаратурой разнесенных позиций от других радиолокационных средств.
К недостаткам прототипа следует отнести:
- высокие требования к пропускной способности системы передачи данных между аппаратурой разнесенных позиций и пунктом обработки информации, т.к. принимаемые сигналы с каждой позиции без фильтрации передаются на пункт обработки информации, где осуществляется совместная обработка принятых сигналов и определение параметров траекторий;
- отождествление воздушных объектов производится по траекториям, классификация целей по государственной принадлежности не производится;
- отсутствие пространственной избирательности РЛС в угломестной плоскости, так как антенная система в виде ЛЭП имеет протяженность только в горизонтальной плоскости. В то время как современные РЛС обеспечивают измерение угломестной координаты обнаруженного объекта;
- отсутствие перестройки направления диаграммы направленности (ДН) РЛС с антенной системой в виде ЛЭП, поскольку ЛЭП являются стационарными неподвижными объектами.
Технической проблемой, на решение которой направлено предлагаемое изобретение, является снижение требований к пропускной способности систем связи между разнесенными позициями (РП) и пунктом обработки информации.
Для решения указанной технической проблемы предлагается способ многопозиционной радиолокации, при котором выполняют излучение радиолокационных сигналов и прием отраженных сигналов аппаратурой разнесенных позиций, выполняют обнаружение объектов, измерение их координат, определение параметров траекторий, при этом производят объединение и совместную обработку информации, получаемой от аппаратуры разнесенных позиций в пункте обработки информации, выполняют корректировку полученной информации посредством сопоставления информации, полученной от аппаратуры разных разнесенных позиций.
Согласно изобретению, обнаружение объектов, измерение их координат и определение параметров траекторий выполняют аппаратурой разнесенных позиций, в качестве антенных систем аппаратуры разнесенных позиций используют активные фазированные антенные решетки, для классификации воздушных объектов используют информацию от системы государственного опознавания с активной фазированной антенной решеткой аппаратуры автоматического зависимого наблюдения, приемоизлучающую аппаратуру разнесенных позиций помещают под радиопрозрачным укрытием и устанавливают на возвышенностях местности или, при необходимости, на вышках, при этом на пункт обработки информации от аппаратуры разнесенных позиций передается только информация о траекториях обнаруженных объектов.
Техническим результатом предлагаемого способа является возможность обзора пространства путем электронного сканирования ДН и улучшение пространственной селекции обнаруживаемых объектов за счет использования активных фазированных антенных решеток.
Проведенный сравнительный анализ заявленного способа и прототипа показывает, что их отличие заключается в следующем:
- в предлагаемом способе первичная и вторичная обработка информации осуществляется аппаратурой разнесенных позиций, а на пункт обработки информации передается только информация о траекториях обнаруженных объектов, в отличие от этого, в прототипе все принимаемые сигналы с каждой аппаратуры разнесенных позиций без фильтрации передаются на пункт обработки информации, где осуществляется совместная обработка принятых сигналов и определение параметров траекторий, поэтому требуется значительно более высокая пропускная способность системы передачи данных;
- в предлагаемом способе для классификации обнаруженных воздушных объектов используется информация, полученная от аппаратуры автоматического зависимого наблюдения (АЗН) и госопознавания, в то время как в прототипе используется только отождествление по траекторной информации, что недостаточно при наблюдении воздушной обстановки, особенно в местности с высокой интенсивностью полетов.
- в предлагаемом способе для измерения координат обнаруженного объекта в угломестной плоскости используется узкая ДН с электронным сканированием, формируемая активной фазированной антенной решеткой (АФАР), в то время как антенна прототипа не имеет избирательности в угломестной плоскости, т.к. ЛЭП имеет протяженность только в горизонтальной плоскости и измерение угломестных координат не производится;
- в предлагаемом способе для измерения координат обнаруженного объекта в азимутальной плоскости используется узкая ДН с электронным сканированием, формируемая АФАР, в то время как антенна прототипа в виде ЛЭП неподвижна и имеет фиксированную по направлению ДН.
Сочетание отличительных признаков и свойства предлагаемого способа формирования ДН из литературы не известно, поэтому он соответствует критериям новизны и изобретательского уровня.
На чертеже приведена структурная схема устройства, реализующего предлагаемый способ.
При реализации предложенного способа выполняется следующая последовательность действий:
- выполняют излучение радиолокационных сигналов и прием отраженных сигналов аппаратурой разнесенных позиций - 1,
- выполняют обнаружение объектов, измерение их координат, определение параметров траекторий аппаратурой разнесенных позиций - 2,
- производят объединение и совместную обработку информации, получаемой от аппаратуры разнесенных позиций в пункте обработки информации - 3,
- выполняют корректировку полученной информации посредством сопоставления информации, полученной от аппаратуры разных разнесенных позиций - 4,
- в качестве антенных систем аппаратуры разнесенных позиций используют активные фазированные антенные решетки - 5,
- для классификации воздушных объектов используют информацию от системы государственного опознавания с активной фазированной антенной решеткой и аппаратуры автоматического зависимого наблюдения - 6,
- приемоизлучающую аппаратуру разнесенных позиций помещают под радиопрозрачным укрытием (РПУ) и устанавливают на возвышенностях местности или, при необходимости, на вышках - 7,
- на пункт обработки информации от аппаратуры разнесенных позиций передается только информация о траекториях обнаруженных объектов - 8.
Реализация предложенного способа многопозиционной радиолокации возможна, например, с помощью устройства, структурная схема которого приведена на чертеже.
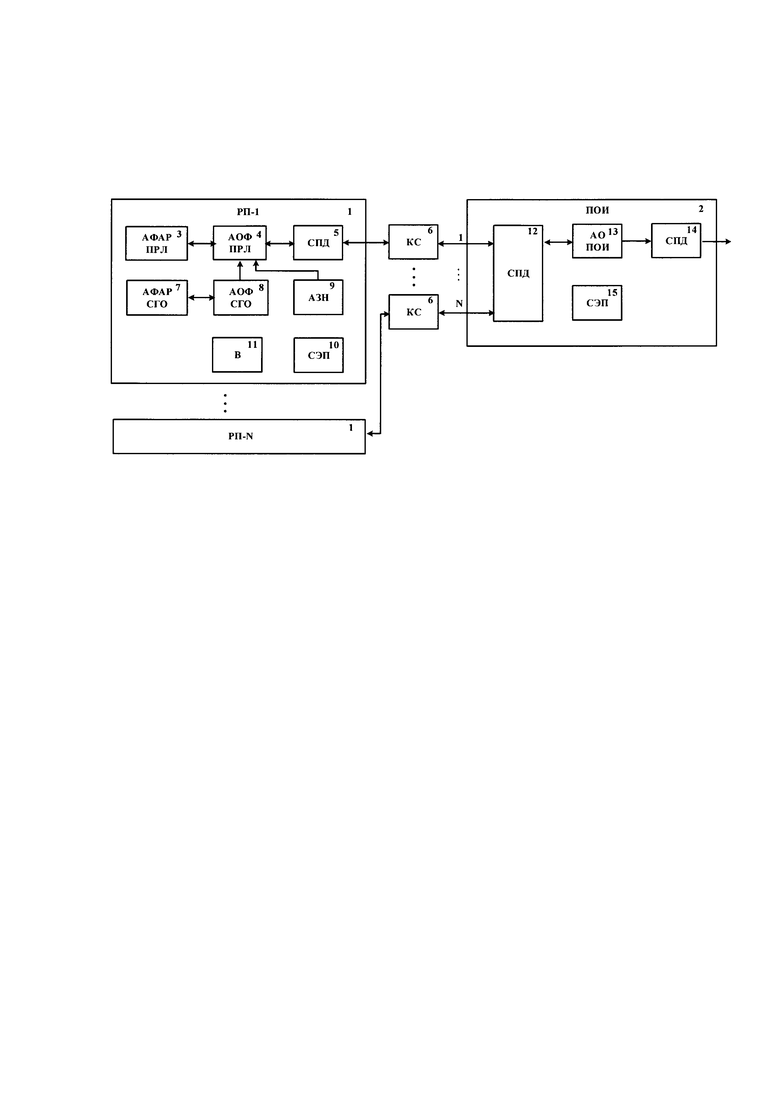
Устройство содержит N разнесенных позиций (РП) 1 и пункт обработки информации (ПОИ) 2. Каждый из РП 1 содержит активную фазированную антенную решетку (АФАР) первичного радиолокатора (ПРЛ) 3, вход-выход которой соединен с аппаратурой обработки и формирования сигналов (АОФ) ПРЛ 4, вход-выход которой соединен с системой передачи данных (СПД) 5, вход-выход которой является выходом РП 1 и соединен через канал связи (КС) 6 с одним из N входов-выходов ПОИ 2.
Система государственного опознавания (СГО) содержит АФАР СГО 7 и аппаратуру обработки и формирования (АОФ) СГО 8.
Вход-выход АФАР СГО 7 соединен со входом-выходом АОФ СГО 8, выход которой соединен с первым входом АОФ ПРЛ 4. Выход аппаратуры зависимого наблюдения (АЗН) 9 соединен со вторым входом АОФ ПРЛ 4.
Приемоизлучающую аппаратуру РП 1, например, АФАР ПРЛ 3, АФАР СГО 7, а также часть аппаратуры АОФ ПРЛ 4 и АОФ СГО 8, помещают под радиопрозрачным укрытием (на чертеже не показано).
РП 1 содержит также систему электропитания (СЭП) 10 и, при необходимости, вышку (В) 11.
ПОИ 2 содержит N-канальную СПД 12, N входов-выходов которой являются N входами-выходами ПОИ 2, a N+1 вход-выход которой соединен с аппаратурой обработки (АО) ПОИ 13, выход которой соединен с СПД 14, выход которой является выходом ПОИ 2.
Устройство на чертеже работает следующим образом.
Аппаратура каждой разнесенной позиции РП 1 выполняет радиолокационный обзор пространства путем излучения зондирующих сигналов и приема отраженных сигналов с помощью АФАР ПРЛ 3. При этом пространственная селекция обнаруживаемых объектов по азимуту и углу места выполняется с помощью ДН, формируемой АФАР ПРЛ 3. Сканирование по азимуту производится электронной перестройкой ДН или механическим вращением АФАР ПРЛ 3, а по углу места - электронной перестройкой ДН.
В АОФ ПРЛ 4 выполняют формирование зондирующих сигналов для АФАР ПРЛ 3 и обработку принятых отраженных сигналов, обнаружение объектов, измерение их координат и определение параметров траекторий.
Для классификации воздушных объектов (ВО) используется информация, полученная с помощью аппаратуры АЗН 9 и системы государственного опознавания, содержащей АФАР СГО 7 и аппаратуру обработки и формирования АОФ СГО 8. При классификации ВО также используются параметры полученных траекторий.
Информация об объектах с выходов АЗН 9 и системы государственного опознавания поступает на АОФ ПРЛ 4, где объединяется с параметрами обнаруженных объектов.
Полученная информация об обнаруженных объектах со всех РП 1 передается через систему передачи данных СПД 5 и каналы связи КС 6 на N-канальную СПД 12 из состава ПОИ 2. Для передачи данных могут быть использованы разные типы каналов связи: например, радиоканалы, проводные каналы связи и т.д.
Далее в АО ПОИ 13 производят объединение и совместную обработку информации, получаемой от аппаратуры РП 1. При необходимости, выполняют корректировку полученной информации посредством сопоставления информации, полученной от аппаратуры разных РП 1.
Для исключения влияния погодных условий (дождь, снег), приемоизлучающую аппаратуру РП 1, например, АФАР ПРЛ 3, АФАР СГО 7, а также часть аппаратуры АОФ ПРЛ 4 и АОФ СГО 8, помещают под радиопрозрачным укрытием (на чертеже не показано).
При пропадании внешнего электропитания аппаратура РП 1 работает от системы электропитания СЭП 10.
С учетом кривизны земли дальность до радиогоризонта определяется высотой расположения антенны РЛС, поэтому для увеличения дальности обнаружения низковысотных воздушных объектов приемоизлучающую аппаратуру РП 1 устанавливают на возвышенностях местности или, при необходимости, на вышках ВН.
Предлагаемое изобретение, по сравнению с прототипом, обеспечивает снижение требований к пропускной способности системы передачи данных за счет того, что первичная и вторичная обработка информации осуществляется аппаратурой РП 1, а на ПОИ 2 передается только информация о траекториях обнаруженных объектов. В отличие от этого, в прототипе все принимаемые сигналы с каждой РП 1 передаются на ПОИ 2, где осуществляется совместная обработка принятых сигналов и определение параметров траекторий;
- в предлагаемом способе для измерения координат обнаруженного объекта в угломестной плоскости используется узкая ДН с электронным сканированием, формируемая АФАР ПРЛ 3, в то время как антенна прототипа не имеет избирательности в угломестной плоскости, т.к. ЛЭП имеет протяженность только в горизонтальной плоскости, и измерение угломестных координат не производится;
- в предлагаемом способе для измерения координат обнаруженного объекта в азимутальной плоскости используется электронное сканирование ДН АФАР ПРЛ 3 или механическое вращение АФАР ПРЛ 3, в то время как антенна прототипа в виде ЛЭП неподвижна и имеет фиксированную по направлению ДН;
- в предлагаемом способе для классификации обнаруженных воздушных объектов используется информация, полученная от АЗН 9 и системы государственного опознавания, содержащей АФАР СГО 7 и АОФ СГО 8, в то время как в прототипе используется только отождествление по траекторной информации, что недостаточно при наблюдении воздушной обстановки, особенно в местности с высокой интенсивностью полетов.
Изобретение относится к радиолокационной технике, а именно к способам построения радиолокационных станций (РЛС) и может быть использовано для построения многопозиционной РЛС различного назначения, например управления воздушным движением. Техническим результатом является возможность обзора пространства путем электронного сканирования ДН и улучшение пространственной селекции обнаруживаемых объектов за счет использования активных фазированных антенных решеток. Согласно способу, выполняют излучение радиолокационных сигналов и прием отраженных сигналов аппаратурой разнесенных позиций. Выполняют обнаружение объектов, измерение их координат, определение параметров траекторий. При этом производят объединение и совместную обработку информации, получаемой от аппаратуры разнесенных позиций в пункте обработки информации, выполняют корректировку полученной информации посредством сопоставления информации, полученной от аппаратуры разных разнесенных позиций. Обнаружение объектов, измерение их координат и определение параметров траекторий выполняют аппаратурой разнесенных позиций, в качестве антенных систем которых используют активные фазированные антенные решетки (АФАР). Для классификации воздушных объектов используют информацию от системы государственного опознавания с АФАР и аппаратуры автоматического зависимого наблюдения. Приемоизлучающую аппаратуру разнесенных позиций помещают под радиопрозрачным укрытием и устанавливают на возвышенностях местности или, при необходимости, на вышках. На пункт обработки информации от аппаратуры разнесенных позиций передают только информацияю о траекториях обнаруженных объектов. 1 ил.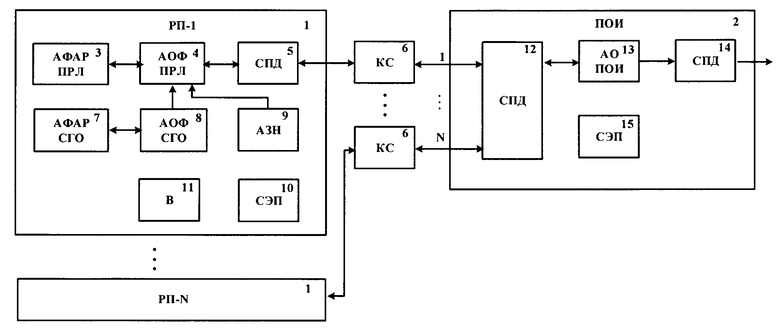
Способ многопозиционной радиолокации, при котором выполняют излучение радиолокационных сигналов и прием отраженных сигналов аппаратурой разнесенных позиций, выполняют обнаружение объектов, измерение их координат, определение параметров траекторий, при этом производят объединение и совместную обработку информации, получаемой от аппаратуры разнесенных позиций в пункте обработки информации, выполняют корректировку полученной информации посредством сопоставления информации, полученной от аппаратуры разных разнесенных позиций, отличающийся тем, что обнаружение объектов, измерение их координат и определение параметров траекторий выполняют аппаратурой разнесенных позиций, в качестве антенных систем аппаратуры разнесенных позиций используют активные фазированные антенные решетки, для классификации воздушных объектов используют информацию от системы государственного опознавания с активной фазированной антенной решеткой и аппаратуры автоматического зависимого наблюдения, приемоизлучающую аппаратуру разнесенных позиций помещают под радиопрозрачным укрытием и устанавливают на возвышенностях местности или на вышках, при этом на пункт обработки информации от аппаратуры разнесенных позиций передается только информация о траекториях обнаруженных объектов.
| СПОСОБ МНОГОПОЗИЦИОННОЙ РАДИОЛОКАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2332684C1 |
| 0 |
|
SU200233A1 | |
| УСТРОЙСТВО ДЛЯ ОТСЛЕЖИВАНИЯ ПОЛОЖЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2704130C2 |
| WO 2008127477 A2, 23.10.2008 | |||
| АНТЕННАЯ СИСТЕМА И СПОСОБ ЕЕ РАБОТЫ | 2019 |
|
RU2729889C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕЛЕЙ (ВАРИАНТЫ) И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2013 |
|
RU2540982C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ КООРДИНАТ И ПАРАМЕТРОВ ЦЕЛИ В МНОГОПОЗИЦИОННОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ | 2006 |
|
RU2330306C1 |
| Способ радиолокационного обзора пространства и многопозиционный комплекс для его осуществления | 2017 |
|
RU2667485C1 |
| ПОЛИМЕРНАЯ КОМПОЗИЦИЯ | 2011 |
|
RU2478672C1 |
| US 2018246200 A1, 30.08.2018 | |||
| US 2010090882 A1, 15.04.2010 | |||
| Устройство для обрезки сучьев со стволов поваленных деревьев | 1976 |
|
SU548422A1 |

