Область техники
Изобретение относится к области определения размеров объектов, в частности к определению размеров объекта для систем, определяющих весогабаритные характеристики.
Уровень техники
В уровне техники известно изобретение для измерения весогабаритных характеристик (US 9478030 B1, 25.10.2016). Данный источник информации раскрывает способ извлечения фактов, включающий: захват первого набора данных изображения глубины определенной области с использованием первого датчика глубины; захват второго набора данных изображения глубины определенной области с использованием первого датчика глубины, при этом второй набор данных изображения глубины захватывается с помощью объекта, присутствующего в пределах определенной области. Определение профиля эффективной глубины объекта на основе, по меньшей мере частично, первого набора данных изображения глубины и второго набора данных изображения глубины с использованием по меньшей мере одного компьютерного процессора. Профиль чистой глубины содержит множество пикселей, соответствующих заданной области, краю.
Недостатком данного решения является использование датчиков глубины, которые обладают множеством недостатков и ограничений в использовании. Также данное решение не обеспечивает достоверного измерения объекта, выполняя измерения с допущениями, по причине того, что датчик глубины не учитывает мертвые зоны, образуемые измеряемым объектом. Конфигурация объекта в мертвой зоне важна для измерения габаритов объекта. Не обладая этой информацией, измерение происходит с допущениями, и поэтому во многих случаях оказывается не точным.
Также в уровне техники известно устройство для измерения размера объектов (ЕР1835310B1, 31.08.2011), которое содержит световую решетку для обнаружения объектов в зоне наблюдения с заданным количеством передатчиков, излучающих проходящие световые лучи, и приемников, при этом соответствующий приемник и по меньшей мере один связанный с ним передатчик формируют ось луча с блоком оценки, в котором принимаемые сигналы, присутствующие на выходах приемников, оцениваются для генерации сигналов обнаружения объектов и в котором сохраняются различные конфигурации параметризации осей луча. Один управляющий сигнал, посредством которого выбирается по меньшей мере одна конфигурация, считывается в блок оценки для параметрирования осей луча во время работы световой решетки. Разрешение объекта заранее определяется как дополнительная конфигурация, при этом разрешение определяется количеством N последовательных осей луча, которые должны быть одновременно прерваны для отчета об объекте, и что времена задержки для активации отдельных конфигураций сохраняются в блоке оценки, при этом временная последовательность различных параметризаций фиксирована.
Недостатком данного решения является зависимость точности измерения от времени сбора данных, и размера и сложности рельефа объекта. Квадратичная зависимость времени измерения от размера объекта. Для получения приемлемой точности, требуется довольно большое время, что делает этот способ неприемлемым для многих задач. Также сложная система и способ фиксации размеров объектов, приводящие к сложно предсказуемому появлению артефактов в полученной модели объекта.
Раскрытие изобретения
Задачей, на решение которой направлено заявленное решение заключается в устранении недостатков, выявленных в предшествующем уровне техники.
Технический результат заявленного изобретения, заключается в:
- высокой степени объективности измерения. Размер вдоль оси измерения определяется как есть, без мертвых зон и допущений,
- постоянной точности измерения не зависящей от геометрических размеров измеряемого объекта,
- линейной зависимость времени измерения объекта, от его размеров, что приводит к сокращению времени измерения,
- простом и предсказуемом способе измерения, упрощении наладки и обслуживания.
Заявленный технический результат достигается тому, что способ измерения размера объекта или расстояния между объектами вдоль одной оси измерения, включающий этапы, на которых: объект измерения попадает в зону измерения светочувствительного элемента, осуществляют перемещение светочувствительного элемента по заданной траектории, с заданной скоростью и шагом, строится нулевая плоскость А0, соответствующая началу измерения, на каждом шаге строится плоскость Аn, которая параллельна нулевой плоскости А0, и перпендикулярна оси измерения, n=1,2,3…., фиксируют значение светового потока вдоль плоскости Аn, светочувствительным элементом, на всей траектории сравнивают получаемые значения светового потока вдоль плоскостей Аn, с соответствующими эталонными значениями светового потока, определяют размер измеряемого объекта, или расстояние между объектами по оси измерения как расстояние между взаимно параллельными плоскостями Аn2 и Аn1, учитывая, где Аn1 соответствует первой границе объекта или началу промежутка между объектами, в которой на траектории зафиксировано изменение значения светового потока вдоль данной плоскости, в сравнении с эталонным значением светового потока для этой плоскости, Аn2 соответствует второй границе объекта или концу промежутка между объектами, в которой зафиксировано следующее изменение значение светового потока вдоль данной плоскости, в сравнении с эталонным значением светового потока для этой плоскости.
Способ, в котором светочувствительный элемент проходит участок траектории, включающий Аn1 и/или Аn2, несколько раз с уменьшающейся скоростью.
Система осуществления способов по предыдущим пунктам для измерения размера объекта, включающая: светочувствительный элемент; механизм для перемещения светочувствительного элемента, или механизм для перемещения объекта мимо стационарно установленного светочувствительного элемента; вычислительное устройство, осуществляющее процесс измерения.
Система, в которой в качестве светочувствительного элемента используется один фотодиод с линзой, фокусирующей световой поток только вдоль плоскости Аn.
Система, в которой в качестве светочувствительного элемента используется светочувствительная матрица. Система дополнительно содержит заднюю подсветку, расположенную напротив светочувствительного элемента, за зоной измерения. Система дополнительно содержит ограждающие конструкции, выполненные с возможностью ограничивать доступ постороннего освещения к светочувствительному элементу. Система, в которой внутренние стенки ограждающих конструкций выполнены черным матовым цветом, поглощающим свет от задней подсветки, или иных посторонних источников освещения.
Система, в которой светочувствительный элемент, двигаясь по заданной траектории вдоль оси измерения собирает и передает, в частности, видимую ширину объекта, цвет.
Краткое описание чертежей
На фиг. 1 представлен пример процесса калибровки, в варианте системы для определения весогабаритных характеристик объекта. В ней данный способ измерения используется для определения высоты объекта.
На фиг.2 представлен внешний вид вышеуказанной системы. На вертикальной стойке можно увидеть направляющую для движения сенсора, а по другую сторону от зоны измерения панель с задней подсветкой. Платформа снизу зоны измерения находится в нулевой плоскости А0 из описания метода измерения. От неё ведется отсчет размера объекта по вертикальной оси измерения - высота.
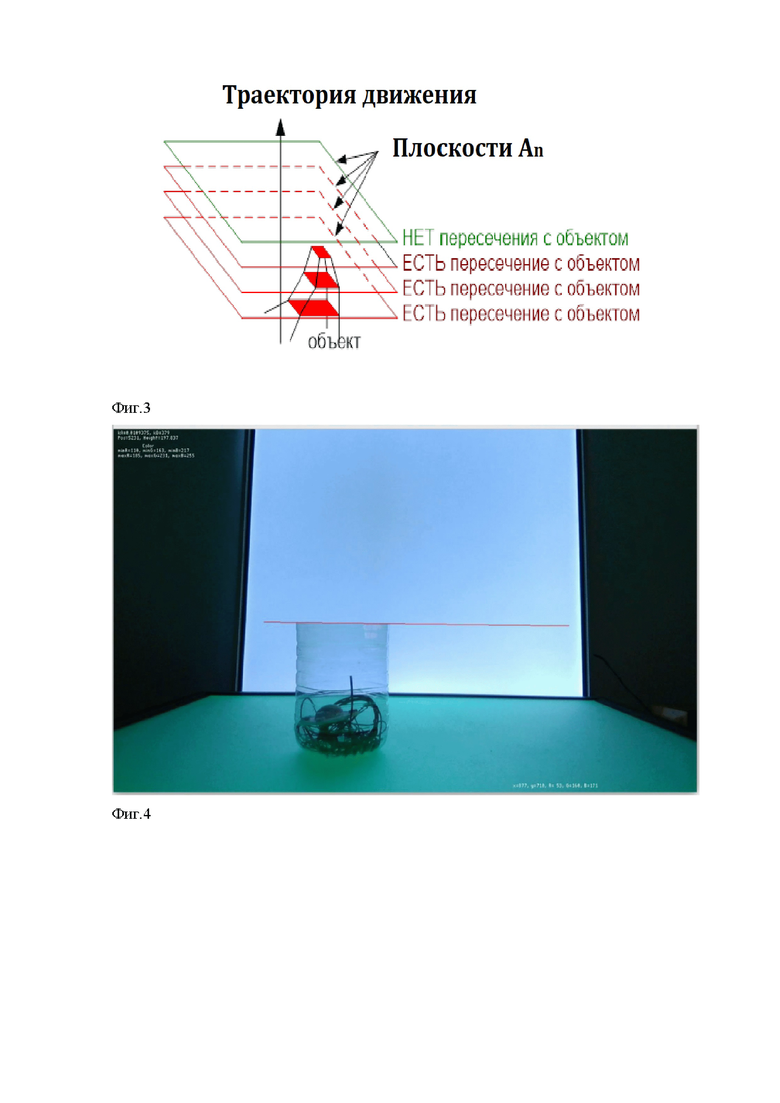
На фиг.3 представлен принцип определения наличия или отсутствия объекта в плоскостях Аn.
На фиг.4-6 представлены примеры измерения различных предметов, посредством заявленного способа и системы. Вид из СЧМ.
Осуществление изобретения.
Способ измерения размера объекта или расстояния между объектами вдоль одной оси измерения, включает этапы, на которых: объект измерения попадает в зону измерения светочувствительного элемента, осуществляется перемещение светочувствительного элемента по заданной траектории, с заданной скоростью и шагом, определяют размер измеряемого объекта, или расстояние между объектами по оси измерения.
При перемещении светочувствительного элемента строится нулевая плоскость А0, которая соответствует началу измерения. На каждом шаге строится плоскость Аn, которая параллельна нулевой плоскости А0, и перпендикулярна оси измерения, n=1,2,3….. Далее фиксируют значение светового потока вдоль плоскости Аn, светочувствительным элементом. На всей траектории сравнивают получаемые значения светового потока вдоль плоскостей Аn, с соответствующими эталонными значениями светового потока.
Определяют размер измеряемого объекта, или расстояние между объектами по оси измерения как расстояние между взаимно параллельными плоскостями Аn2 и Аn1. Аn1 соответствует первой границе объекта или началу промежутка между объектами, в которой на траектории зафиксировано изменение значения светового потока вдоль данной плоскости, в сравнении с эталонным значением светового потока для этой плоскости. Аn2 соответствует второй границе объекта или концу промежутка между объектами, в которой зафиксировано следующее изменение значение светового потока вдоль данной плоскости, в сравнении с эталонным значением светового потока для этой плоскости.
Для повышения точности измерения светочувствительный элемент проходит участок траектории, включающий Аn1 и/или Аn2, несколько раз с уменьшающейся скоростью.
Система для измерения размера объекта, включает: светочувствительный элемент; механизм для перемещения светочувствительного элемента, или механизм для перемещения объекта мимо стационарно установленного светочувствительного элемента; вычислительное устройство, осуществляющее процесс измерения (например, компьютер, или микроконтроллер).
В качестве светочувствительного элемента может быть использован один фотодиод с линзой, фокусирующей световой поток только вдоль плоскости Аn. Тогда судить о наличии, или отсутствию объектов вдоль данной плоскости можно будет по изменению интенсивности света, попадающего на фотодиод.
Также в качестве светочувствительного элемента может быть использована светочувствительная матрица (СЧМ). Например, видеокамеру. Тогда из всего изображения, фиксируемые видеокамерой, нужно выделить потоки света, приходящие вдоль плоскости Аn. Они будут попадать на некую прямую линию пикселей (в общем случае, чуть отличающуюся от прямой кривую, из-за искажений линзы)-калибровочную кривую (КК). Наличие или отсутствие пересечения с калибровочной кривой с объектом измерения будет определяться по изменению значения светового потока и/или его интенсивности на любом из пикселей с калибровочной кривой.
Система дополнительно содержит заднюю подсветку, расположенную напротив светочувствительного элемента, за зоной измерения. Система также дополнительно может содержать ограждающие конструкции, выполненные с возможностью ограничивать доступ постороннего освещения к светочувствительному элементу. Внутренние стенки ограждающих конструкций выполнены черным матовым цветом, поглощающим свет от задней подсветки, или иных посторонних источников освещения.
На фиг.1, объекты одинаковой высоты, стоя на некоторой плоскости параллельной калибровочной кривой с разных сторон и на разном расстоянии от СЧМ, находятся точно под калибровочной кривой. Это признак правильной калибровки калибровочной кривой для плоскости Аn проходящей точно над объектами. Калибровочная кривая отображается оранжевым цветом.
Расстояние между плоскостями Аn можно назвать шагом измерения (ШИ).
В частном случае можно использовать один светочувствительный элемент, и перемещать его по траектории, с последовательной фиксацией наличия, или отсутствия пересечения с объектами.
Светочувствительный элемент (СЧЭ можно перемещать по линейной траектории. Также траектория движения светочувствительного элемента может перемещаться по более сложной траектории, например, для обхода каких-то конструктивных элементов, или для следования за перемещающимися измеряемыми объектами, и т.д.
В частном случае системы, можно использовать группу одновременно перемещающихся светочувствительных элементов, для более быстрого обхода всех необходимых областей измерения.
Светочувствительный элемент перемещается по направляющей посредством шагового двигателя, обычного двигателя, силы тяжести, центробежной силы, или иных предсказуемых сил, обеспечивающих достаточно (для требуемой точности) предсказуемое, или известное (датчики текущего положения) движение светочувствительного элемента, вдоль траектории движения.
Имея фиксированную частоту кадров с СЧМ, меняя скорость СЧЭ, можно добиваться разной точности определения краев объектов.
Светочувствительный элемент может перемещаться в любом направлении и с любой скоростью (траектория движения и скорость могут регулироваться посредством программного обеспечения на вычислительном устройстве), в зависимости от требуемых задач. Например, можно сначала перемещать светочувствительный элемент быстро вверх, перескакивая за один кадр по 100 последовательных плоскостей Аn (к примеру, расположенных через каждые 0.1мм). Таким образом, приблизительно найдя момент окончания объекта, начать перемещаться вниз медленнее, перескакивая за один кадр по 10 плоскостей Аn. Найдя начало объекта уже точнее, опять начать перемещаться вверх совсем медленно, по одной плоскости Аn за кадр, уже максимально точно находя координату окончания объекта. Понятно, что частота расположения плоскостей Аn может быть любой, а уточняющих этапов, отличающихся скоростью и направлением движения, сколь угодно много. В данном случае точность измерения будет зависеть только от размера видимого сектора, попадающего на пиксель светочувствительной матрицы.
Если на двумерной СЧМ смотреть значения пикселей не только по калибровочной кривой, но и по сторонам от неё, то можно делать вывод о достаточно широком разрыве в определении объекта, и досрочно прекратить измерение. Например, при измерении высоты прозрачных бутылок при плохом фоне и освещении, видно только донышко, этикетку и пробку. И если последний непрозрачный элемент пройден, и выше КК ничего нет, значит пробка уже пройдена и высота бутылки измерена.
Линзы перед светочувствительной матрицей, определяют FOV (угол обзора) камеры по осям изображения. Подбирая линзы, можно управлять величиной этих FOV, увеличивая точность и/или охват области измерения. Сужая FOV по оси измерения, можно повышать точность измерения, а расширяя FOV по другой оси - увеличивать зону измерения за счет снижения светочувствительности. Точность измерения тем хуже, чем дальше измеряемый объект от светочувствительной матрицы, за исключением случаев, когда FOV равен, или близок к 0. Слишком близкое расположение объекта к светочувствительной матрице также может привести к ухудшению точности, из-за размывания частей объекта, находящихся не в фокусе.
Перед первым использованием или при изменениях условий освещения или перемещении системы в другое место необходимо заново проводить процесс калибровки. В процессе калибровки фиксируются значения светового потока от фона (в частном случае только на КК, или КК и выше) без объекта- эталонное значение, и фиксируя наличие объекта по изменению цвета/светимости, т.е. значению светового потока на КК.
Фон можно запоминать как один цвет, по достаточно сильному отличию от которого фиксировать наличие объекта.
Фон можно запоминать как фоновое изображение, и работать с КК проходящей по соответствующим частям фонового изображения.
В качестве частного случая системы, напротив зоны измерения светочувствительного элемента поставить заднюю подсветку (ЗП), с цветом/светимостью резко отличающимся от большинства измеряемых объектов при естественном освещении, то это упрощает процесс определения наличия или отсутствия объекта в зоне действия светочувствительного элемента.
В качестве частного случая системы, если с помощью корпуса ограничить доступ постороннего освещения к зоне измерения/измеряемым объектам, то подобрать подсветку будет проще, так как повернутая к СЧМ сторона объекта будет не освещенная (черная) и резко отличаться от светящегося фона.
В качестве частного случая системы, если внутренние стенки корпуса не будут отражать свет от ЗП на объект, то он будет ещё более контрастный на фоне ЗП. То есть лучше матовая черная поверхность внутри зоны измерения (корпуса).
Камера двигается до того момента, когда хоть в одном пикселе КК цвет/ световой поток станет отличным от светового потока фона (если двигать сверху вниз). Например, фон синий, поднимаем камеру постоянно делая фотографии, пока хоть в одном пикселе калибровочной кривой на очередной фотографии цвет не синий, значит всё ещё в зоне прямой А есть объект и можно продолжать поднимать камеру. Как все пиксели калибровочной кривой стали синими, значит камера поднялась выше объекта.
Калибровочная кривая определяется при настройке системы измерения наладчиками. В самом простом случае, калибровочную прямую можно определить следующим образом:
1. Установить на измерительной платформе предметы одинаковой высоты. Желательно на разном расстоянии от СЧМ и по разные стороны.
2. Передвинуть по направляющей и найти для СЧМ такое место, при котором на получаемых кадрах все верхние части всех установленных в п.1 предметов будут находится на одной линии.
3. Провести калибровочную линию в притык к верхней части установленных в п.1 объектов.
4. Повторять пп.2-3 до тех пор, пока результат не устроит.
Пример результата, с установленными на платформе одинаковыми кружками представлен на Фиг.1.
Светочувствительный элемент, двигаясь по заданной траектории, выполнен с возможностью не только участвовать в определении размера объекта вдоль оси измерения, но и собирать и передавать в другие системы дополнительную информацию. Например, видимую ширину объекта, цвет и т.п. характеристики объекта и его окружения, необходимые для работы других систем, работающих совместно с данной.
В частном случае, в заявленной системе в качестве вычислительного устройства используется мини ПК в связке с микроконтроллером. Светочувствительным элементом выступает вэб камера с разрешением 1280х720 15fps и стандартной линзой. Задняя яркая светодиодная белая подсветка чуть выше высоты зоны измерения. Передвигается камера с помощью шагового двигателя по вертикальной линейной направляющей. Сначала камера быстро поднимается от уровня стола и быстро, но не точно ищет верх измеряемого объекта. За каждый кадр перескакивая по 20мм высоты. Попутно сенсор собирает информацию о видимой ширине объекта по всей его высоте. Она понадобится для определения длины и ширины объекта с другой камеры. Найдя верхнее окончание объекта (по калибровочной кривой - оранжевая линия на Фиг.1), камера начинает спускаться вниз медленнее, за кадр проходя уже по 2мм. Найдя объект, камера начинает подниматься вверх совсем медленно, по 0.2мм за кадр. Таким образом, камера находит плоскость An сразу над объектом с точностью 0.2мм (Фиг.1). Но учитывая параметры линзы камеры (углового размера сектора света на один пиксель), размера области измерения, качества изображения и другие факторы, данная система измеряет высоту объекта с точностью около 1мм.
На фиг.4 представлен пример измерения объекта посредством заявленного способа и системы. В результате измерения высота объекта была определена как 197,837 мм. Реальный размер объекта составил 198 мм.
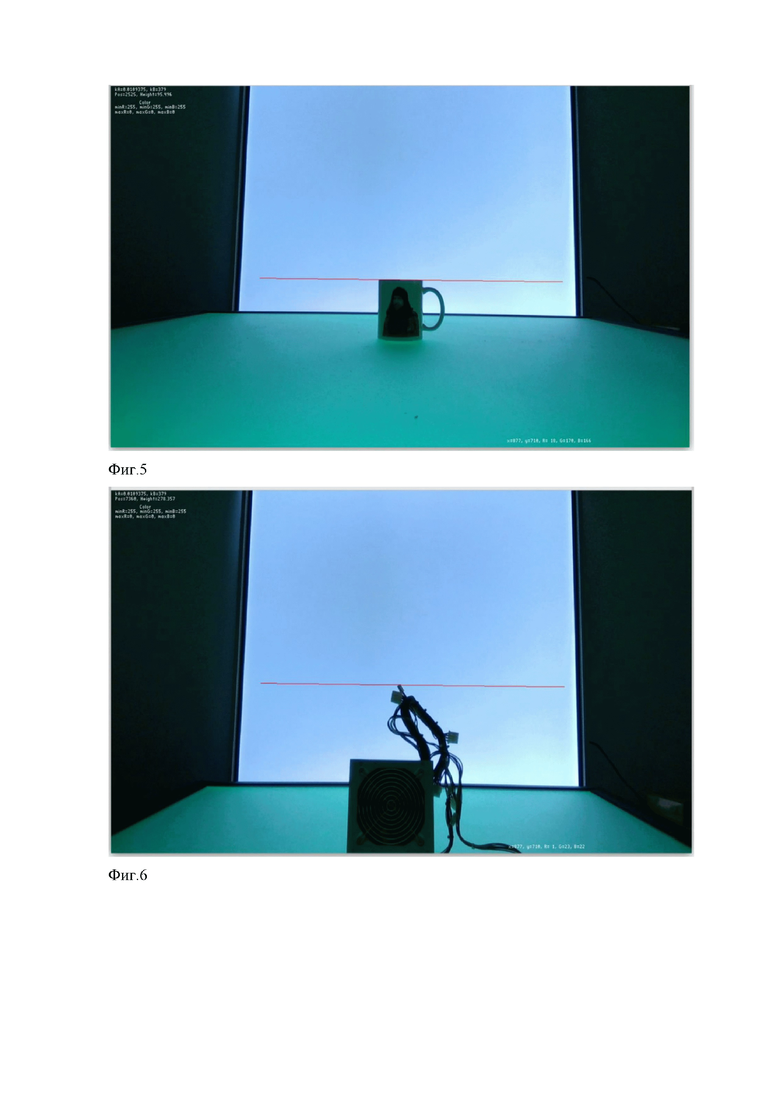
На фиг.5 представлен пример измерения объекта посредством заявленного способа и системы. В результате измерения высота объекта была определена как 95,496 мм. Реальный размер объекта составил 95 мм.
На фиг.6 представлен пример измерения объекта посредством заявленного способа и системы. В результате измерения высота объекта была определена как 278,357 мм. Реальный размер объекта составил 278 мм.
Данные примеры показывают, что заявленное изобретение обладает относительно высокой точностью измерения.

Изобретение относится к способу и системе измерения расстояния между границами объектов вдоль одной оси измерения. Технический результат заключается в повышении точности измерения расстояния между границами объектов. Способ включает этапы, на которых: измеряемые границы объектов последовательно попадают в зону видимости светочувствительного элемента, осуществляют изменение взаимного положения границ объектов и светочувствительного элемента по заданной траектории с заданной скоростью и шагом, светочувствительный элемент фиксирует значение светового потока вдоль плоскости Аn, проходящей через светочувствительный элемент и перпендикулярной оси измерения, n=1,2,3…., на всей траектории сравнивают получаемые значения светового потока с соответствующими эталонными значениями светового потока, определяют расстояние между границами как расстояние между взаимно параллельными плоскостями Аn1 и Аn2, учитывая, где Аn1 соответствует первой границе объекта или началу промежутка между объектами, в которой на траектории зафиксировано изменение значения светового потока вдоль данной плоскости, в сравнении с эталонным значением светового потока для этой плоскости, Аn2 соответствует второй границе объекта или концу промежутка между объектами, в которой на траектории зафиксировано изменение значения светового потока вдоль данной плоскости, в сравнении с эталонным значением светового потока для этой плоскости. 2 н. и 7 з.п. ф-лы, 6 ил.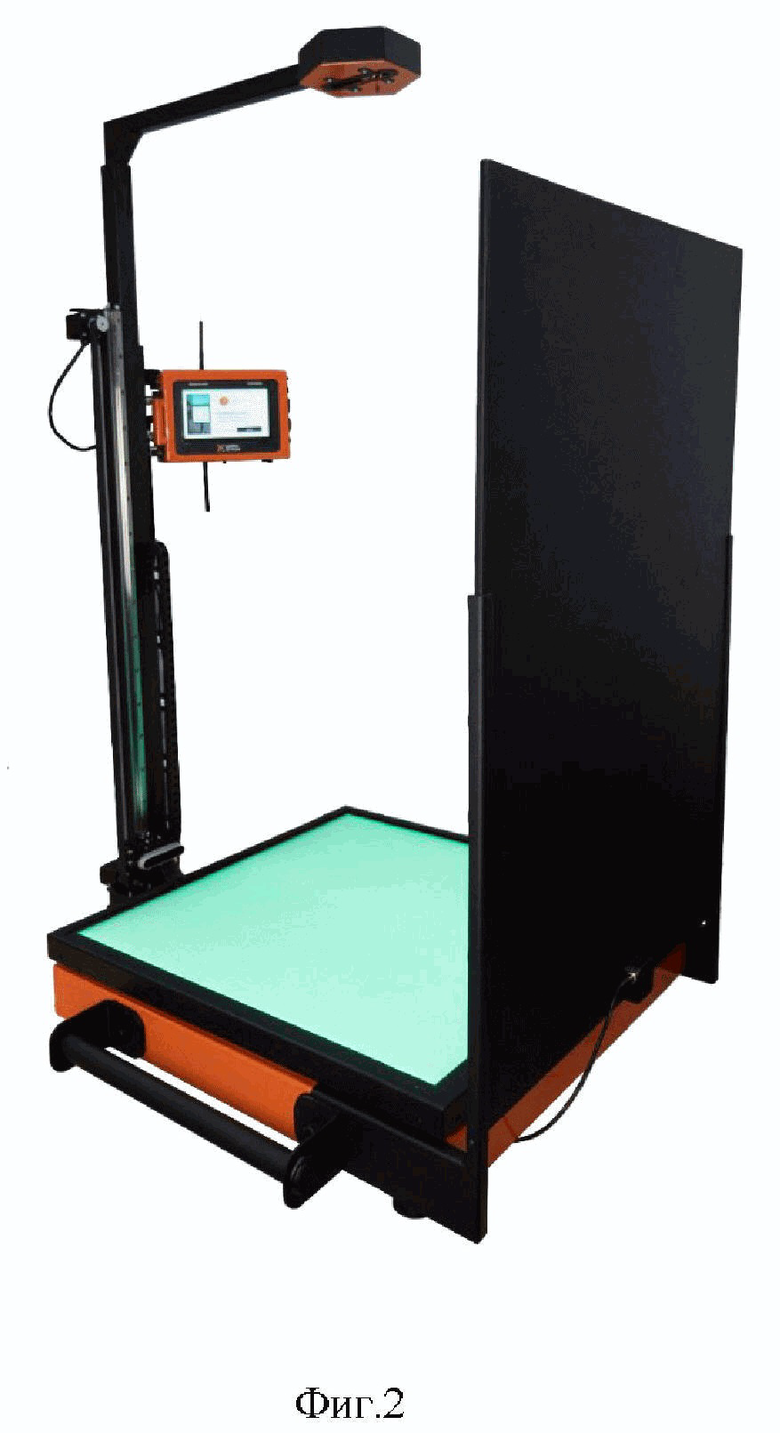
1. Способ измерения расстояния между границами объектов вдоль одной оси измерения, включающий этапы, на которых:
измеряемые границы объектов последовательно попадают в зону видимости светочувствительного элемента,
осуществляют изменение взаимного положения границ объектов и светочувствительного элемента по заданной траектории с заданной скоростью и шагом,
светочувствительный элемент фиксирует значение светового потока вдоль плоскости Аn, проходящей через светочувствительный элемент и перпендикулярной оси измерения, n=1,2,3….,
на всей траектории сравнивают получаемые значения светового потока с соответствующими эталонными значениями светового потока,
определяют расстояние между границами как расстояние между взаимно параллельными плоскостями Аn1 и Аn2, учитывая, где
Аn1 соответствует первой границе объекта или началу промежутка между объектами, в которой на траектории зафиксировано изменение значения светового потока вдоль данной плоскости, в сравнении с эталонным значением светового потока для этой плоскости,
Аn2 соответствует второй границе объекта или концу промежутка между объектами, в которой на траектории зафиксировано изменение значения светового потока вдоль данной плоскости, в сравнении с эталонным значением светового потока для этой плоскости.
2. Способ по п. 1, в котором светочувствительный элемент проходит участок траектории, включающий Аn1 и/или Аn2, несколько раз с уменьшающейся скоростью.
3. Система осуществления способов по пп. 1, 2 для измерения расстояния между границами объектов вдоль одной оси измерения, включающая:
светочувствительный элемент;
механизм для изменения взаимного положения границ объектов и светочувствительного элемента по заданной траектории с заданной скоростью и шагом,
вычислительное устройство, осуществляющее процесс измерения.
4. Система по п. 3, в которой в качестве светочувствительного элемента используется один фотодиод с линзой, фокусирующей световой поток только вдоль плоскости Аn.
5. Система по п. 3, в которой в качестве светочувствительного элемента используется светочувствительная матрица.
6. Система по пп. 4, 5, дополнительно содержащая заднюю подсветку, расположенную напротив светочувствительного элемента, за зоной измерения.
7. Система по п. 6, дополнительно содержащая ограждающие конструкции, выполненные с возможностью ограничивать доступ постороннего освещения к светочувствительному элементу.
8. Система по п. 7, в которой внутренние стенки ограждающих конструкций выполнены черным матовым цветом, поглощающим свет от задней подсветки или иных посторонних источников освещения.
9. Система по п. 3, в которой светочувствительный элемент, двигаясь по заданной траектории вдоль оси измерения, собирает и передает, в частности, видимую ширину объекта, цвет.
| СПОСОБ И УСТАНОВКА ДЛЯ ЛИНЕЙНОГО РАЗМЕРНОГО КОНТРОЛЯ ИЗГОТОВЛЕННЫХ ОБЪЕКТОВ | 2020 |
|
RU2802404C2 |
| ОПТИКО-ЭЛЕКТРОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ ОБЪЕКТОВ ОТНОСИТЕЛЬНО ДРУГ ДРУГА | 2002 |
|
RU2244904C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПРОСТРАНСТВЕННОГО РАССТОЯНИЯ МЕЖДУ МАЛОРАЗМЕРНЫМИ ОБЪЕКТАМИ | 2019 |
|
RU2734070C1 |
| СПОСОБ ОРИЕНТИРОВАНИЯ ВИДЕОКАМЕР ПРИ ИЗМЕРЕНИИ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ КРУПНОГАБАРИТНЫХ ОБЪЕКТОВ | 1993 |
|
RU2082084C1 |
| МНОГОЭЛЕКТРОДНАЯ ИОНИЗАЦИОННАЯ КАМЕРА | 0 |
|
SU164082A1 |
| Графическая накладка для измерения размеров элементов при помощи устройства видеоконтроля | 2018 |
|
RU2762619C2 |
| DE 10322907 B4, 17.07.2008 | |||
| CN 105403146 A, 16.03.2016 | |||
| US 6424421 B1, 23.07.2002 | |||
| Конусная дробилка | 1991 |
|
SU1835310A2 |
| US 9478030 B1, 25.10.2016. | |||

