Изобретение относится к области беспилотных летательных аппаратов (БПЛА) мультироторного типа, использующих технологию вертикального взлета и посадки, предназначенных для проведения научных исследований, доставки грузов, аэрофотографирования и видеонаблюдения, с возможностью передачи по радиоканалу на станцию управления полетной информации, получаемой бортовым и навесным оборудованием в режиме реального времени.
Успехи современной электроники в области цифровых систем связи, пространственной стабилизации устройств и систем управления многодвигательными электроприводами, равно как и создание автономных энергонасыщенных силовых компонентов таких электроприводов, имеет своим логическим результатом появление и динамичное совершенствование разнообразных конструкций БПЛА, основанных на хорошо разработанной теории летательных аппаратов в т.ч. аппаратов вертолетного и мультироторного типа (мультикоптеров). Особый интерес представляют малогабаритные мультикоптеры, благодаря своей невысокой стоимости и возможности унификации их электронных и силовых компонентов. Унификация и модульность корпусных элементов БПЛА также является весьма перспективным направлением развития этой техники. Основной областью применения мультикоптеров является проведение аэрофотосъемки и аэровидеосъемки, мониторинг различных параметров окружающей среды, с использованием дополнительного навесного оборудования, в т.ч. видеооборудования, доставка и сброс грузов небольшой массы. Мультикоптеры могут выполнять полет в условиях ограниченного пространства, а также в местах, нахождение в которых представляет угрозу для жизни человека или присутствие в которых для человека невозможно, что является неоценимым достоинством БПЛА.
В описании к патенту на изобретение RU №2734680 (опубл. 21.10.2020, бюл. №30) приведен краткий обзор современных типовых конструкций мультикоптеров, с акцентом на проблему их энергоснабжения и, связанными с этой проблемой, задачами увеличения несущей способности аппаратов и увеличения времени их автономного полета. Сам патент RU №2734680 также направлен на решение такой задачи. Согласно патенту, аппарат снабжается специальным корпусом, который обладает свойством всенаправленного приемника - преобразователя лазерного излучения, генерируемого внешней, по отношению к самому аппарату, системой генерации. Общим условным недостатком предшественников этого аналога и его самого, в контексте данного анализа уровня техники, является конструкционная и технологическая сложность их конструкций, а также отсутствие модульных решений в их корпусных элементах.
Известен беспилотный летательный аппарат, представляющий собою мультикоптер, отличительным признаком которого является использование винто-кольцевых движителей (импеллеров) вместо обычных воздушных винтов - пропеллеров (описание к патенту на изобретение RU №2666493, опубл. 07.09.2018, бюл. №25). Преимущества данного решения весьма сомнительны, поскольку увеличение тягового усилия достигается только для толкающих винтов, расположенных в профилированном толстостенном кольце, т.е. эффект от применения импеллеров достигается в том случае, когда винты работают в набегающем потоке, что для мультикоптеров не характерно (Шайдаков, Завалов, «Аэродинамическое проектирование фенстерона», МАИ, 1980). В то же время, профилированные кольцевые элементы импеллеров придают БПЛА дополнительный вес и габариты, а также создают проблему торможения воздушного потока элементами их крепления к несущему корпусу БПЛА, что также полностью способно нивелировать любой положительный эффект от их использования. Вероятно, именно поэтому использование импеллеров в авиации не получило широкого распространения, за исключением достаточно редкого их применения в вертолетных фенстеронах.
Известна конструкция складного квадрокоптера (описание к патенту на изобретение RU №2665123, опубл. 28.08.2018, бюл. №25). Эта конструкция является аналогом китайского квадрокоптера Tarot Х4, технические особенности которого защищены китайскими патентами №№2014204282854, 2014203682366, 2034302624585, 2014301541104, 2014302583208. Характерное отличие этого аналога состоит в конструкции узла складывания - развертывания лучей. Если в китайских аналогах складывание осуществляется в вертикальной плоскости, т.е. «зонтиком», то в конструкции по патенту RU №2665123 складывание осуществляется в горизонтальной плоскости, причем фиксация лучей в развернутом положении обеспечивается накиднами конусными гайками, что позволяет значительно увеличить функциональную жесткость и прочность несущего основания квадрокоптера и оборудовать его более мощными винтомоторными движителями и соответствующими источниками питания, а также увеличить полезную нагрузку аппарата. При всех несомненных достоинствах данного аналога, необходимо заметить, что вопрос предпочтения складных конструкций мультикоптеров разборным и модульным конструкциям вовсе не закрыт и последние могут иметь свои преимущества, по крайней мере, в производственно-технологическом и ценовом аспекте.
За прототип заявленного, как изобретение, технического решения принимается представленный на рынке БПЛА квадрокоптер марки DJI Phantom 4 [товар представлен, например, на торговой площадке ФОКУС-ГЕО [сайт]. - URL: https://fgeo.ru/catalog/bpla/dji/ (дата обращения: 20.07.2023)]. Корпус данного аппарата представляет собою разъемную пластиковую конструкцию с интегрированными в ее корпус четырьмя симметричными несущими лучами. На внешних оконечностях лучей установлены электромоторы с пропеллерами, а внутри пространства несущих лучей проложены линии питания и управления электромоторами, подключенные внутри корпуса к электронному блоку управления полетом. Бортовой источник питания (аккумулятор) размещен также внутри корпуса квадрокоптера и к нему подключены все бортовые потребители электроэнергии. В нижней центральной части корпуса снаружи имеются устройства для подвеса и подключения полезной нагрузки. Следует отметить, что серийное производство такого мультикоптера - прототипа требует больших капиталовложений в технологическую подготовку производства, в частности, в изготовление пресс-форм для массового изготовления пластиковых элементов корпуса, что, вероятно, является одной из причин сравнительно высокой стоимости аппарата. Унификация и модульное исполнение корпусных элементов в данном аналоге-прототипе не предусмотрены, поэтому коррекция функциональных возможностей аппарата, например увеличение его грузоподъемности, невозможна без конструктивного изменения всех элементов его корпуса, разработки и изготовлении новой соответствующей технологической оснастки, в результате чего получается не новая модификация квадрокоптера, а, по сути- новое изделие. Можно также отметить, что квадрокоптер-прототип не является ни складным, ни разборным и его параметры не отвечают требованиям по минимизации транспортных габаритов.
Задачей, на решение которой направлено патентуемое техническое решение, является создание недорогого многофункционального компактного разборного мультикоптера, с возможностью использования его узлов в качестве базовой авиационной платформы семейства мультикоптеров, производство которых не потребует больших капитальных вложений и может быть освоено в кратчайшие сроки.
В соответствии с нормативными правилами подачи заявки на регистрацию патента на изобретение, сформулирован и заявлен технический результат, который достигается при использовании изобретения. Этот технический результат заключается в реализации патентуемым мулыпикоптером своего функционального назначения как авиационной платформы.
Сущность изобретения, обеспечивающая достижение заявленного технического результата, характеризуется следующими существенными признаками:
- мультикоптер, включает в себя разъемный корпус и четное количество несущих лучей-кронштейнов в количестве не менее четырех, которые симметрично укреплены на центральном корпусе;
- на внешних оконечностях лучей-кронштейнов установлены электромоторы с пропеллерами;
- внутри несущих лучей - кронштейнов проложены линии питания и управления электромоторами, подключенные внутри корпуса к электронному блоку управления полетом, который подключен также к бортовому источнику питания.
От известных конструкций мультикоптер отличается тем, что
- несущие лучи-кронштейны имеют трубчатое сечение и укреплены на центральной части корпуса, на их внешних оконечностях установлены монтажные наконечники, несущие на себе электромоторы с пропеллерами,
- к нижней части каждого из наконечников прикреплена вертикальная стойка-опора шасси
- корпус выполнен как трехчастный, включающий в себя центральную часть корпуса, а также съемные верхний и нижний колпаки;
- верхний колпак снабжен, по меньшей мере, одним грузовым кронштейном, расположенным и ориентированным по углу между несущими лучами-кронштейнами;
- центральная часть корпуса снабжена внутренними перегородками с возможностью размещения компонентов электронного блока управления полетом в ячейках, образованных внутренними перегородками и внешней стенкой центральной части корпуса.
Целесообразные частные конструктивные решения патентуемого мультикоптера, отвечающие обозначенной выше сущности и способствующие достижению заявленного технического результата, предусматривают ряд его конструктивных особенностей, которые характеризуются следующими частными признаками:
- все детали корпуса и элементы их взаимного крепления выполнены из пластика;
- несущие лучи-кронштейны выполнены из пластика;
- несущие лучи-кронштейны выполнены из легкого алюминиевого сплава;
- монтажные наконечники выполнены из пластика;
- нижний колпак снабжен, по меньшей мере, одним грузовым кронштейном;
- бортовой источник питания расположен внутри нижнего колпака и снабжен кабельным или блочным разъемом, причем ответная часть разъема расположена в центральной части корпуса;
- мультикоптер выполнен с возможностью быстрой сборки-разборки путем соединения его элементов в единое целое и разборки его на отдельные элементы.
Сущность заявленного как изобретение технического решения поясняется чертежами.
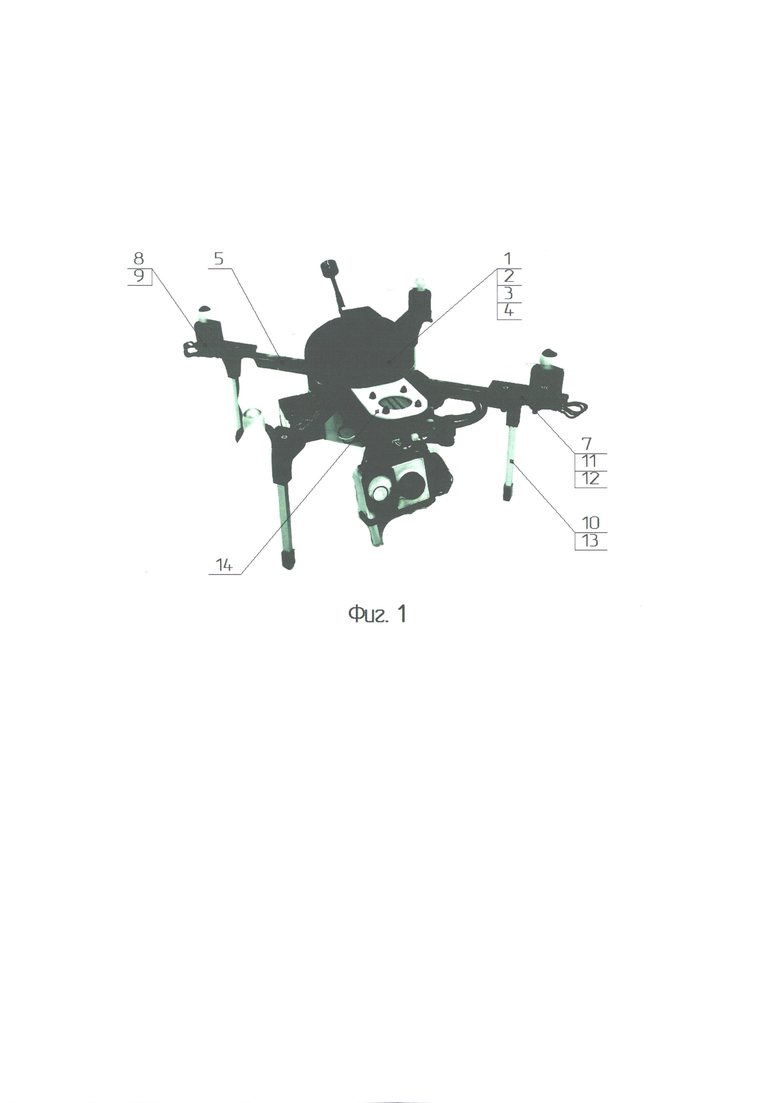
На Фиг. 1 изображен внешний вид мультикоптера с полезной нагрузкой.
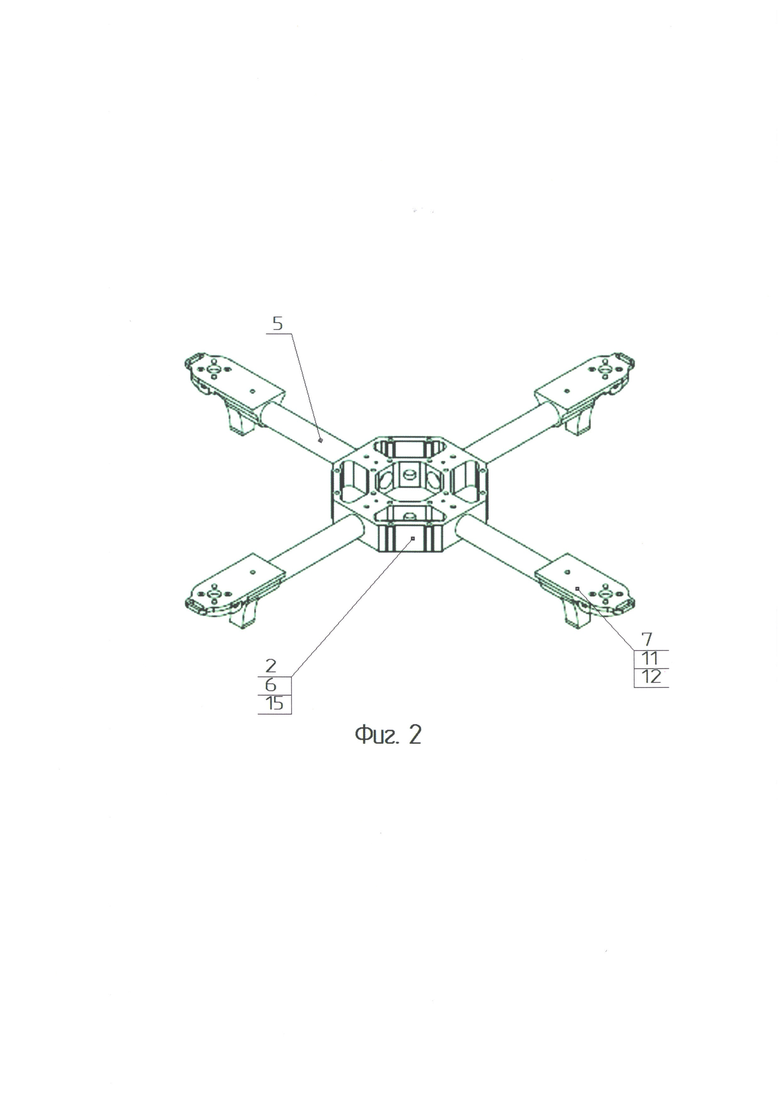
На Фиг. 2 изображена центральная часть корпуса, несущие лучи-кронштейны и монтажные наконечники в сборе.
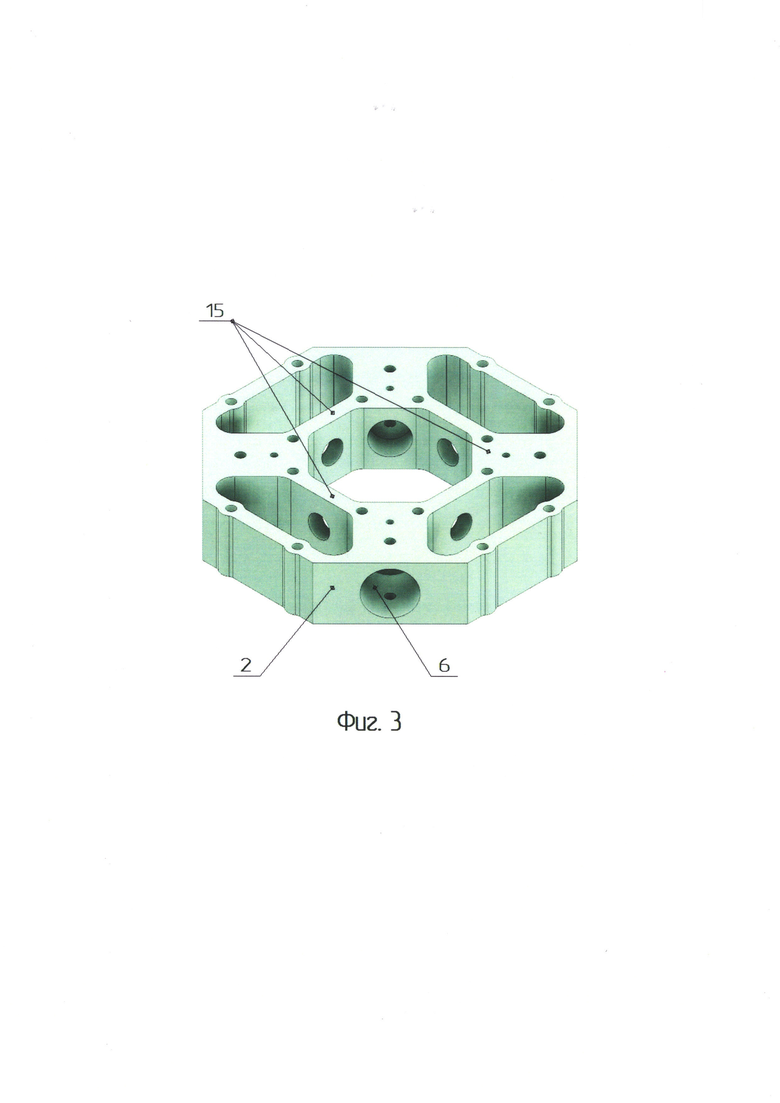
На Фиг. 3 изображена центральная часть корпуса.
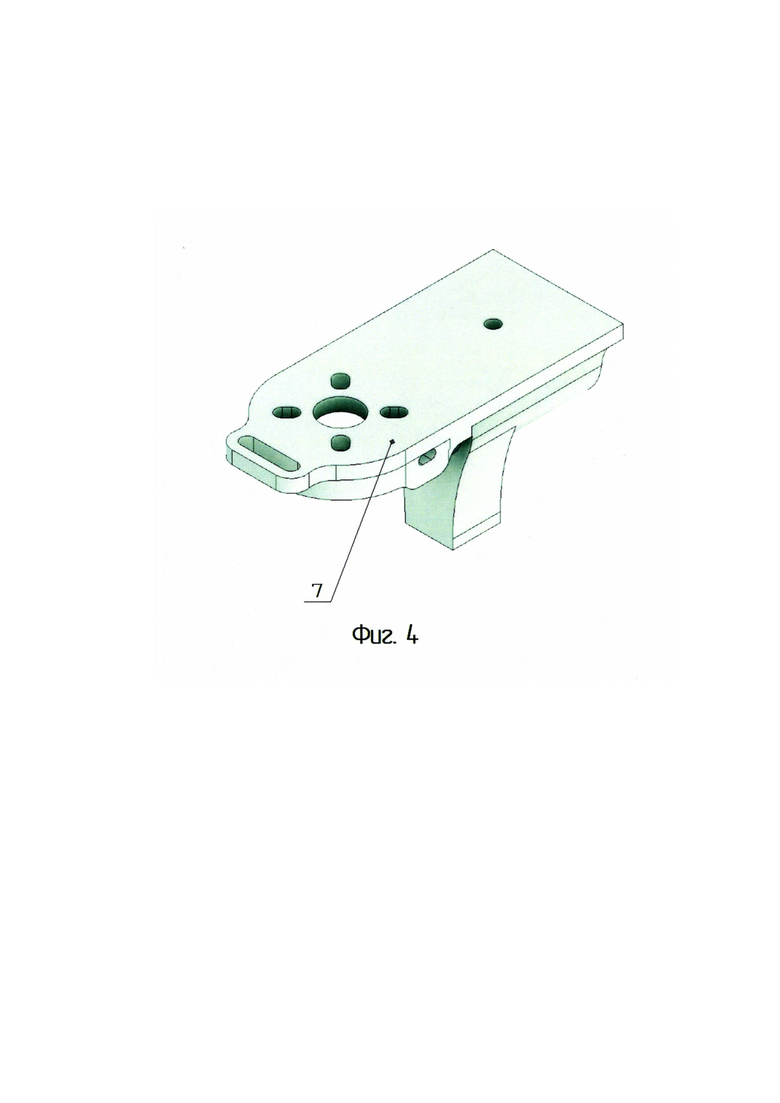
На Фиг. 4 изображен монтажный наконечник.
Мультикоптер, включает в себя трехчастный разъемный корпус (1), в состав которого входит центральная часть (2), верхний колпак (3) и нижний колпак (4). Колпаки (3) и (4) скреплены с центральной частью (2) корпуса (1) при помощи разъемных фиксаторов той или иной конструкции или при помощи винтов (эти позиции на чертежах не показаны). Четное количество, например, четыре несущих луча - кронштейна (5) симметрично укреплены на центральной части (2) корпуса (1). Несущие лучи-кронштейны (5) имеют трубчатое сечение, могут быть изготовлены из отрезков пластиковых или легкосплавных, например, алюминиевых труб и зафиксированы в гнездах (6) центральной части корпуса (2) посредством разъемных фиксаторов или стопорных винтов (эти позиции на чертежах не показаны). На внешних оконечностях идентичных несущих лучей-кронштейнов (5) установлены и зафиксированы идентичные монтажные наконечники (7), несущие на себе идентичные электромоторы (8) с идентичными пропеллерами (9). Электромоторы (8) укреплены на монтажных наконечниках с использованием арматуры, поставляемой в комплекте с электромоторами, для чего на наконечниках имеется верхняя опорная площадка с монтажными отверстиями, обеспечивающими возможность крепления арматуры разных типоразмеров. Кроме того, к нижней части каждого из монтажных наконечников (7) прикреплена вертикальная стойка-опора (10) шасси. Монтажный наконечник (7) снабжен двумя крепежными гнездами (11) и (12). В гнездо (11) радиально к корпусу (1) вставляется луч - кронштейн (5) и, перпендикулярно ему, в гнездо (12) соответственно вставляется вертикальная стойка-опора (10) шасси. Фиксация этих элементов осуществляется таким же способом, как и фиксация луча-кронштейна (5) в гнезде центральной части (2) корпуса (1) или другим известным конструкционным способом. Вертикальная стойка-опора (10) шасси имеет трубчатое сечение и может быть изготовлена из отрезков пластиковых или легкосплавных, например, алюминиевых труб. На нижних оконечностях вертикальных стоек-опор (10) надеты мягкие резиновые или пластиковые подошвы - колпачки (13). Для оборудовния мультикоптера полезной нагрузкой, верхний колпак (3) снабжен, по меньшей мере, одним грузовым кронштейном (14), расположенным и ориентированным по углу между несущими лучами-кронштейнами (5). При выборе материалов для изготовления всех описанных выше корпусных элементов мультикоптера следует руководствоваться, во первых, принципом их наименьшего веса при достаточной конструкционной прочности и, во вторых, технологичностью при минимальных затратах на сырье и минимальным временем подготовки производства. Этим условиям отвечают легкие алюминиевые сплавы и конструкционные пластики различных типов и в различных сочетаниях, которые могут поставляться, в том числе, в виде прокатного или экструзионного профиля. Элементы и организация внутреннего пространства мультикоптера, в целом, не отличается от прототипа и других близких аналогов, за исключением того, что центральная часть (2) корпуса (1) снабжена внутренними перегородками (15), которые, с одной стороны, обеспечивают необходимую и достаточную жесткость всей несущей конструкции мультикоптера, при минимальном ее весе, и, с другой стороны, дают возможность размещения некоторой части компонентов электронного блока в ячейках, которые образованы внутренними перегородками и внешней стенкой центральной части (2) корпуса (1). Остальную часть компонентов электронного блока целесообразно расположить в верхнем колпаке (2) корпуса (1). Линии электропитания и управления электромоторами проложены внутри несущих лучей - кронштейнов (5) и подключены внутри корпуса (1) к электронному блоку управления полетом, который, в свою очередь, подключен также к бортовому источнику питания -аккумулятору (позиции этих элементов на чертежах не показаны). Аккумулятор целесообразно, с точки зрения компоновки и центровки аппарата, расположить в нижнем колпаке (4) корпуса (1) и соединить его с электронным блоком посредством кабельного или блочного разъема, что даст возможность производить его зарядку отдельно от основной части аппарата. Нижний колпак (3) также может быть оборудован грузовым кронштейном для крепления полезной нагрузки мультикоптера и слотами для ее подключения к электронному блоку (эти позиции на чертежах не показаны).
Мультикоптер используется по назначению и функционирует следующим образом. Аппарат в составе партии мультикоптеров изначально поставляется потребителю в разобранном состоянии, находясь в специальной укладке с инструкцией по его сборке и использованию. Сборка мультикоптера осуществляется в течение нескольких минут благодаря особенностям его простой и понятной сборно-разборной конструкции, описанной выше. Все электронные компоненты мультикоптера, а также большая часть его конструктивных элементов, за исключением несущих лучей-кронштейнов (5), электромоторов (8) и пропеллеров (9), возможно также нижнего колпака (4), с установленным внутри него аккумулятором, являются унифицированными и позволяют использовать их в различных по тактико-техническим параметрам аппаратах, отвечающих заявленной сущности изобретения. Имеется в виду использование идентичных по поперечному профилю несущих лучей-кронштейнов (5) различной длины, электромоторов (8) различной мощности и, соответствующих заданной полезной нагрузке и полетному времени пропеллеров (9), а также аккумуляторов различной емкости, располагающихся внутри нижнего колпака (4). В зависимости от габаритов полезной нагрузки, различную длину могут иметь также вертикальные стойки - опоры (10) шасси, изготовленные из идентичного трубчатого профиля. Полезная нагрузка мультикоптера навешивается на грузовые кронштейны (14) верхнего колпака (3) и на грузовой кронштейн нижнего колпака и соединяется с электронным блоком обычным способом посредством кабельных разъемов.
Преимущество заявленного технического решения заключается в минимальных затратах на подготовку его производства и в отсутствии жестких требований к оснащению производства современным высокоточным оборудованием. Кроме того, унификация большинства корпусных элементов и возможность создания на их базе семейства мультикоптеров с различными параметрами, само по себе, представляет значительную ценность заявленного технического решения. При этом, как показали полевые летные испытания опытных образцов мультикоптера в различных его применениях, в т.ч. в оборонном применении, его тактико-технические параметры ничем не уступают дорогостоящим образцам известных производителей, в т.ч. параметрам прототипа.
| название | год | авторы | номер документа |
|---|---|---|---|
| УЧЕБНЫЙ КВАДРОКОПТЕР | 2024 |
|
RU2835694C1 |
| Беспилотный летательный аппарат вертолетного типа | 2022 |
|
RU2792460C1 |
| Складной мультикоптер | 2022 |
|
RU2790211C1 |
| УНИВЕРСАЛЬНЫЙ МНОГОФУНКЦИОНАЛЬНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ КВАДРОКОПТЕРНОГО ТИПА | 2024 |
|
RU2835704C1 |
| РАМА МУЛЬТИКОПТЕРА (ВАРИАНТЫ) | 2017 |
|
RU2657650C1 |
| БЕСПИЛОТНОЕ ВОЗДУШНОЕ СУДНО МУЛЬТИРОТОРНОГО ТИПА (БВС) ДЛЯ ТРАНСПОРТИРОВКИ МАЛОГАБАРИТНЫХ ГРУЗОВ | 2023 |
|
RU2823830C1 |
| Беспилотный летательный аппарат вертолётного типа | 2022 |
|
RU2799689C1 |
| Малогабаритный летательный аппарат (ЛА) вертикального взлета/посадки с увеличенной дальностью полета | 2017 |
|
RU2681464C1 |
| МУЛЬТИКОПТЕР | 2018 |
|
RU2685107C1 |
| Универсальный комплекс распределенного управления интеллектуальными роботами для борьбы с малогабаритными беспилотными летательными аппаратами | 2023 |
|
RU2817740C1 |
Изобретение относится к области авиации, в частности к конструкциям беспилотных летательных аппаратов (БПЛА) мультироторного типа. Мультикоптер содержит несущие лучи-кронштейны, имеющие трубчатое сечение и укрепленные на центральной части корпуса. На их внешних оконечностях установлены монтажные наконечники, несущие на себе электромоторы с пропеллерами, к нижней части каждого из наконечников прикреплена вертикальная стойка опоры шасси. Корпус выполнен как трехчастный, включающий в себя центральную часть корпуса, а также съемные верхний и нижний колпаки. Верхний колпак снабжен грузовым кронштейном, расположенным и ориентированным по углу между несущими лучами-кронштейнами. Центральная часть корпуса снабжена внутренними перегородками с возможностью размещения компонентов электронного блока управления полетом в ячейках, образованных внутренними перегородками и внешней стенкой центральной части корпуса. Обеспечивается возможностью использования узлов БПЛА в качестве базовой авиационной платформы семейства мультикоптеров, производство которых может быть освоено в кратчайшие сроки. 7 з.п. ф-лы, 4 ил.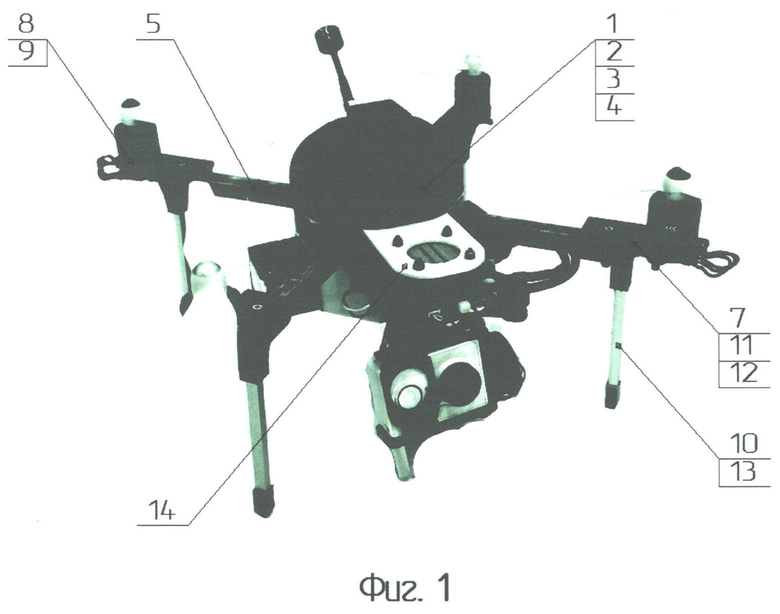
1. Мультикоптер, включающий в себя разъемный корпус и четное количество несущих лучей-кронштейнов в количестве не менее четырех, которые симметрично укреплены на корпусе, на внешних оконечностях лучей-кронштейнов установлены электромоторы с пропеллерами, внутри несущих лучей-кронштейнов проложены линии питания и управления электромоторами, подключенные внутри корпуса к электронному блоку управления полетом, который подключен также к бортовому источнику питания, отличающийся тем, что несущие лучи-кронштейны имеют трубчатое сечение и укреплены на центральной части корпуса, на их внешних оконечностях установлены монтажные наконечники, несущие на себе электромоторы с пропеллерами, к нижней части каждого из наконечников прикреплена вертикальная стойка-опора шасси, корпус выполнен как трехчастный, включающий в себя центральную часть корпуса, а также съемные верхний и нижний колпаки, причем верхний колпак снабжен по меньшей мере одним грузовым кронштейном, расположенным и ориентированным по углу между несущими лучами-кронштейнами, а центральная часть корпуса снабжена внутренними перегородками с возможностью размещения компонентов электронного блока управления полетом в ячейках, образованных внутренними перегородками и внешней стенкой центральной части корпуса.
2. Мультикоптер по п. 1, отличающийся тем, что все детали корпуса и элементы их взаимного крепления выполнены из пластика.
3. Мультикоптер по п. 1, отличающийся тем, что несущие лучи-кронштейны выполнены из пластика.
4. Мультикоптер по п. 1, отличающийся тем, что несущие лучи-кронштейны выполнены из легкого алюминиевого сплава.
5. Мультикоптер по п. 1, отличающийся тем, что монтажные наконечники выполнены из пластика.
6. Мультикоптер по п. 1, отличающийся тем, что нижний колпак снабжен по меньшей мере одним грузовым кронштейном.
7. Мультикоптер по п. 1, отличающийся тем, что бортовой источник питания расположен внутри нижнего колпака и снабжен кабельным или блочным разъемом, причем ответная часть разъема расположена в центральной части корпуса.
8. Мультикоптер по п. 1, отличающийся тем, что выполнен с возможностью быстрой сборки-разборки путем соединения его элементов в единое целое и разборки его на отдельные элементы.
| Способ охлаждения беспилотного летательного аппарата и устройство для осуществления способа | 2020 |
|
RU2747320C1 |
| KR 1020200040285 A, 17.04.2020 | |||
| Способ многофункциональной аэросъемки на основе беспилотных воздушных судов для планирования и сопровождения сейсморазведочных работ и многофункциональный аппаратно-программный комплекс для его реализации | 2021 |
|
RU2779707C1 |
| US 10011352 B1, 03.07.2018 | |||
| JP 6669612 B2, 18.03.2020 | |||
| 0 |
|
SU201918A1 | |
