Изобретение относится к области беспилотных авиационных устройств, использующих технологию вертикального взлета и посадки и может быть использовано для обучения операторов беспилотных летательных аппаратов.
Известен «Дрон-трансформер» (патент РФ № RU 204990 U1, В64С 27/00, 2021). Дрон содержит модуль контроллера и модуль рамы, мотор, пропеллер, мотогондолу, шасси, аккумулятор. Решаемой задачей является создание нового универсального мультикоптерного беспилотного летательного аппарата, который позволяет пользователям изменять характеристики полета дронов, такие как подъемная сила и выносливость, по мере необходимости для конкретных задач. Недостатком указанного устройства является большие габариты и масса, а также отсутствие какой-либо защиты, что делает невозможным полеты в помещении. Кроме того, данная конструкция сложна в производстве.
Известен «Автономный летательный аппарат (дрон)» (патент РФ № RU 164066 U1, В64С 39/02, 2015). Автономный летательный аппарат (дрон), содержащий корпус, внутри которого установлен блок управления, соединенный с аккумулятором и двигателем, отличающийся тем, что корпус выполнен состоящим из блоков. Недостатком указанного устройства является большие габариты и масса, а также отсутствие какой либо защиты. Отсутствует камера и лазерный дальномер для автономных полетов в помещении.
Наиболее близким по значению является квадрокоптер «Modular autonomous drone» (патент № US 11409291 B2, В64С 2201/027, 2022), выбранный в качестве прототипа. Квадрокоптер имеет четыре двигателя, каждый из которых соединен с соответствующим регулятором оборотов, а полетный контроллер соединен с четырьмя регуляторами оборотов для управления четырьмя двигателями. Квадрокоптер также имеет множество камер и контроллер искусственного интеллекта (ИИ) для определения траектории полета автономного квадрокоптера. Недостатком известного прототипа являются большие габариты и масса для полетов в помещении, отсутствие модульности, а также конструкция защиты пропеллеров, обеспечивающая только частичную безопасность.
Решаемой задачей предлагаемого изобретения является создание нового мультикоптерного беспилотного летательного аппарата, который позволяет сочетать малые габариты и массу с возможностью программирования автономного полета квадрокоптера в помещении, оснащенный в целях безопасности полноценной защитой пропеллеров, и имеющий модульную конструкцию.
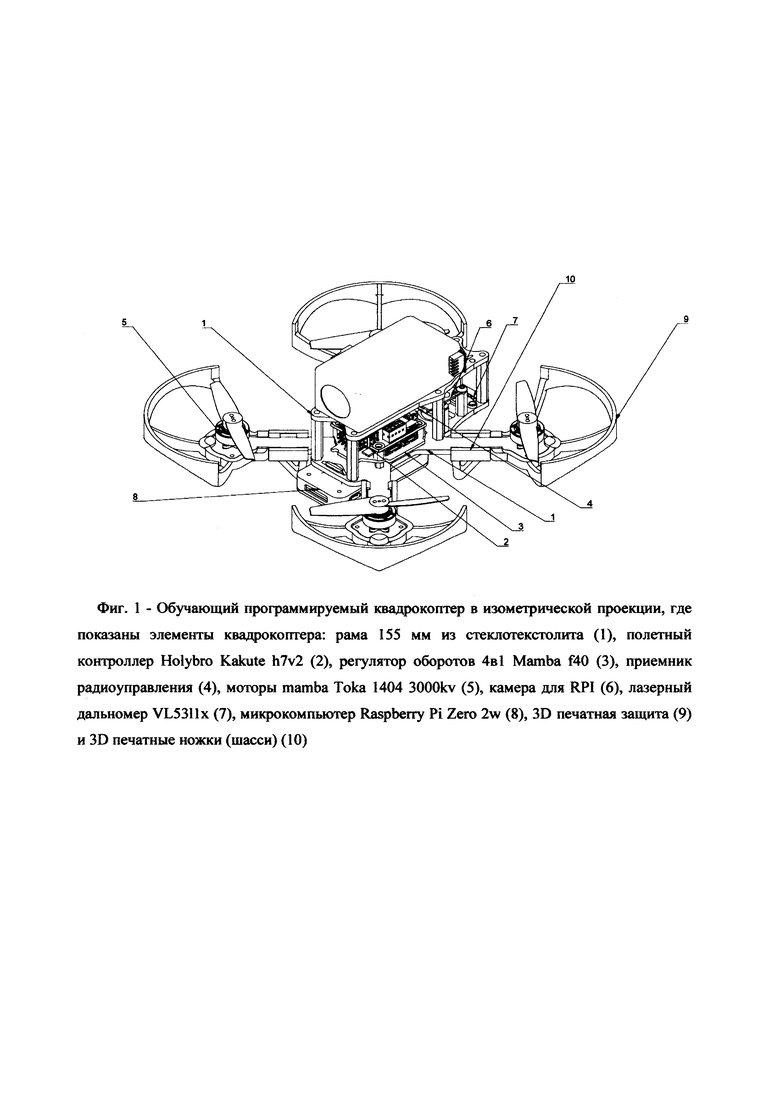
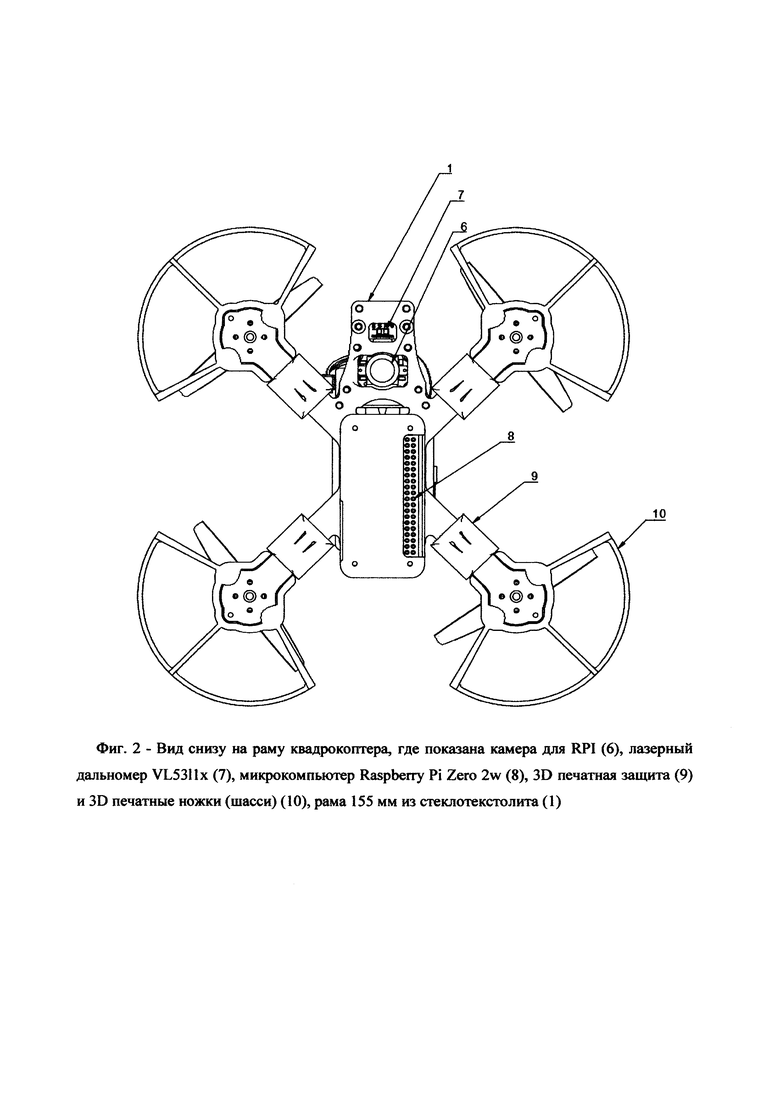
Сущность изобретения поясняется чертежами, где на фиг. 1 изображен обучающий программируемый квадрокоптер в изометрической проекции, а на фиг. 2 - вид снизу на раму квадрокоптера, где введены следующие обозначения: рама 155 мм из стеклотекстолита (1), полетный контроллер Holybro Kakute h7v2 (2), регулятор оборотов 4 в 1 Mamba f40 (3), приемник радиоуправления (4), моторы Mamba Тока 1404 3000kv (5), камера для RPI (6), лазерный дальномер VL53Hx (7), микрокомпьютер Raspberry Pi Zero 2w (8), 3D печатная защита (9) и 3D печатные ножки (шасси) (10).
Технический результат состоит в создании обучающего квадрокоптера, имеющего функцию программирования автономного полета квадрокоптера в помещении, оснащенного полноценной защитой пропеллеров. Квадрокоптер имеет модульную конструкцию. Модульная конструкция позволяет производить многоразовую сборку/разборку устройства, что дает возможность использовать это в обучающих целях. Программирование автономного полета осуществляется с помощью установленного микрокомпьютера Raspberry Pi Zero 2W (RPI), который установлен на раму квадрокоптера.
Технический результат предлагаемого изобретения достигается тем, что квадрокоптер, имеющий малые габариты и массу, состоящий из рамы 155 мм из стеклотекстолита, полетного контроллера Holybro Kakute h7v2, регулятора оборотов 4в1 Mamba f40, приемника радиоуправления, 4-х моторов mamba Toka 1404 3000kv, печатной защиты и печатных ножек (шасси), позволяет установить микрокомпьютер Raspberry Pi Zero 2w, камеру для RPI и лазерный дальномер VL5311x.
Разработанная рама квадрокоптера предусматривает крепеж под: полетный контроллер, регулятор 4 в 1, 4 мотора Mamba Тока 1404 3000kv, камеру для RPI, лазерный дальномер V15311x - все эти элементы устанавливаются на раму посредством винтового соединения. Защита и ножки (шасси) устанавливаются на раму посредством защелкивающегося соединения. Микрокомпьютер Raspberry Pi Zero 2w устанавливается в крепеж - кейс, который в свою очередь устанавливается на раму посредством защелкивающегося соединения.
Моторы соединяются с регулятором оборотов посредством паячного соединения, лазерный дальномер и камера подключаются к микрокомпьютеру RPI, микрокомпьютер RPI с регулятором оборотов и приемником радиоуправления подключаются к полетному контроллеру.
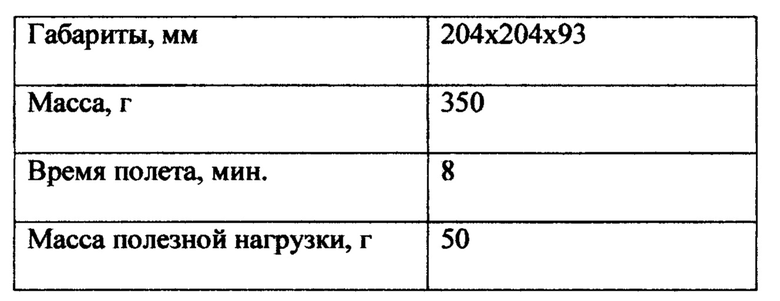
Технические характеристики заявленного изобретения представлены в таблице №1:
Кроме указанного достигаемого технического результата и преимуществ заявленного изобретения, следует отметить дополнительный технический результат, а именно упрощение изготовления узлов защиты пропеллеров и ножек (шасси) путем FDM (3D) печати.
| название | год | авторы | номер документа |
|---|---|---|---|
| УЧЕБНЫЙ КВАДРОКОПТЕР | 2024 |
|
RU2835694C1 |
| КВАДРОКОПТЕР | 2024 |
|
RU2831865C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2023 |
|
RU2814297C1 |
| Автономный беспилотный летательный аппарат для доставки малокалиберных боеприпасов до цели | 2023 |
|
RU2826931C1 |
| БЕСПИЛОТНОЕ ВОЗДУШНОЕ СУДНО МУЛЬТИРОТОРНОГО ТИПА (БВС) ДЛЯ ТРАНСПОРТИРОВКИ МАЛОГАБАРИТНЫХ ГРУЗОВ | 2023 |
|
RU2823830C1 |
| Беспилотный летательный аппарат вертолетного типа | 2022 |
|
RU2792460C1 |
| Беспилотный летательный аппарат вертолётного типа | 2022 |
|
RU2799689C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ КОМПЛЕКС | 2022 |
|
RU2798159C1 |
| Квадрокоптер | 2020 |
|
RU2734680C1 |
| УНИВЕРСАЛЬНЫЙ МНОГОФУНКЦИОНАЛЬНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ КВАДРОКОПТЕРНОГО ТИПА | 2024 |
|
RU2835704C1 |
Изобретение относится к беспилотным летательным аппаратам и может быть использовано для обучения операторов беспилотных летательных аппаратов. Квадрокоптер состоит из рамы 155 мм из стеклотекстолита, полетного контроллера Holybro Kakute h7v2, регулятора оборотов 4в1 Mamba f40, приемника радиоуправления, 4-х моторов mamba Тока 1404 3000kv, печатной защиты пропеллеров и печатных ножек шасси, позволяет установить микрокомпьютер Raspberry Pi Zero 2w, камеру для Raspberry Pi и лазерный дальномер VL5311x. Моторы соединяются с регулятором оборотов посредством паянного соединения, лазерный дальномер и камера подключаются к микрокомпьютеру Raspberry Pi, микрокомпьютер Raspberry Pi с регулятором оборотов и приемником радиоуправления подключаются к полетному контроллеру. Микрокомпьютер Raspberry Pi Zero 2w устанавливается в крепеж - кейс, который, в свою очередь, вместе с защитой и ножками шасси устанавливается на раму посредством защелкивающегося соединения. Обеспечивается создание обучающего квадрокоптера, имеющего функцию программирования автономного полета в помещении, оснащенного полноценной защитой пропеллеров, позволяющего производить многоразовую сборку/разборку устройства. 2 з.п. ф-лы, 2 ил., 1 табл.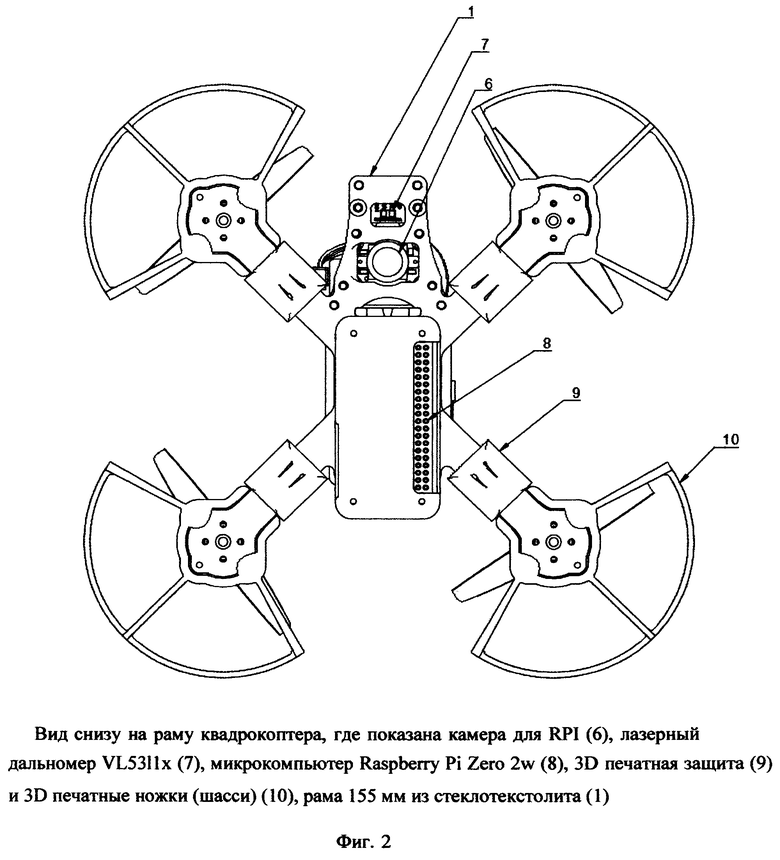
1. Обучающий программируемый квадрокоптер, состоящий из рамы, полетного контроллера Holybro Kakute h7v2, регулятора оборотов 4 в 1 Mamba 140, приемника радиоуправления, 4-х моторов Mamba Тока 1404 3000kv, камеры для микрокомпьютера Raspberry Pi, лазерного дальномера VL5311x, микрокомпьютера Raspberry Pi Zero 2w, 3D печатной защиты и 3D печатных ножек шасси, отличающийся тем, что имеет разработанную компактную раму квадрокоптера 155 мм из стеклотекстолита, предусматривающую крепеж под полетный контроллер, регулятор оборотов 4 в 1, 4 мотора Mamba Toka 1404 3000kv, камеру для микрокомпьютера Raspberry Pi, лазерный дальномер V15311x, которые устанавливаются на раму посредством винтового соединения, при этом микрокомпьютер Raspberry Pi Zero 2w устанавливается в крепеж - кейс, который, в свою очередь, вместе с защитой и ножками шасси устанавливается на раму посредством защелкивающегося соединения.
2. Обучающий программируемый квадрокоптер по п. 1, отличающийся тем, что имеет конструкцию защиты пропеллеров, обеспечивающую полную безопасность для полетов в помещении.
3. Обучающий программируемый квадрокоптер по п. 1, отличающийся тем, что имеет модульную конструкцию.
| US 11409291 B2, 09.08.2022 | |||
| СПОСОБ ОБРАБОТКИ БАЛАНСОВ | 0 |
|
SU210352A1 |
| СПОСОБ ПОЛУЧЕНИЯ ГРАН|УЛИРОВАННОГО ПЛАВИКОВОГОШПАТА | 0 |
|
SU211527A1 |
| АСТАШИНА ОЛЬГА "Как использовать беспилотные платформы, оснащенные LIDAR?", размещено 26.06.2020, Найдено в интернет онлайн https://dji-blog.ru/naznachenie/geodesia/kak-ispolzovat-bespilotnye-platformy-osnashhennye-lidar.html | |||
| US 20210316874 A1, 14.10.2021 | |||
| US | |||
