формулам, приведенным в описании изобретения, вычисляются средние зна чения углов элементов внешнего ориентирования снимка и линейные эле- менты внешнего ориентирования
Изобретение относится к области отограмметрии, в частности к способам построения фотограмметрических сетей при обновлении топографических карт и исследованиям геомет- 5 ических характеристик динамических процессов, например, природной среды,.
Целью изобретения является повышение точности обновления и сниже- 10 вне трудоемкости за счет исключения необходимости получения опорных точек.
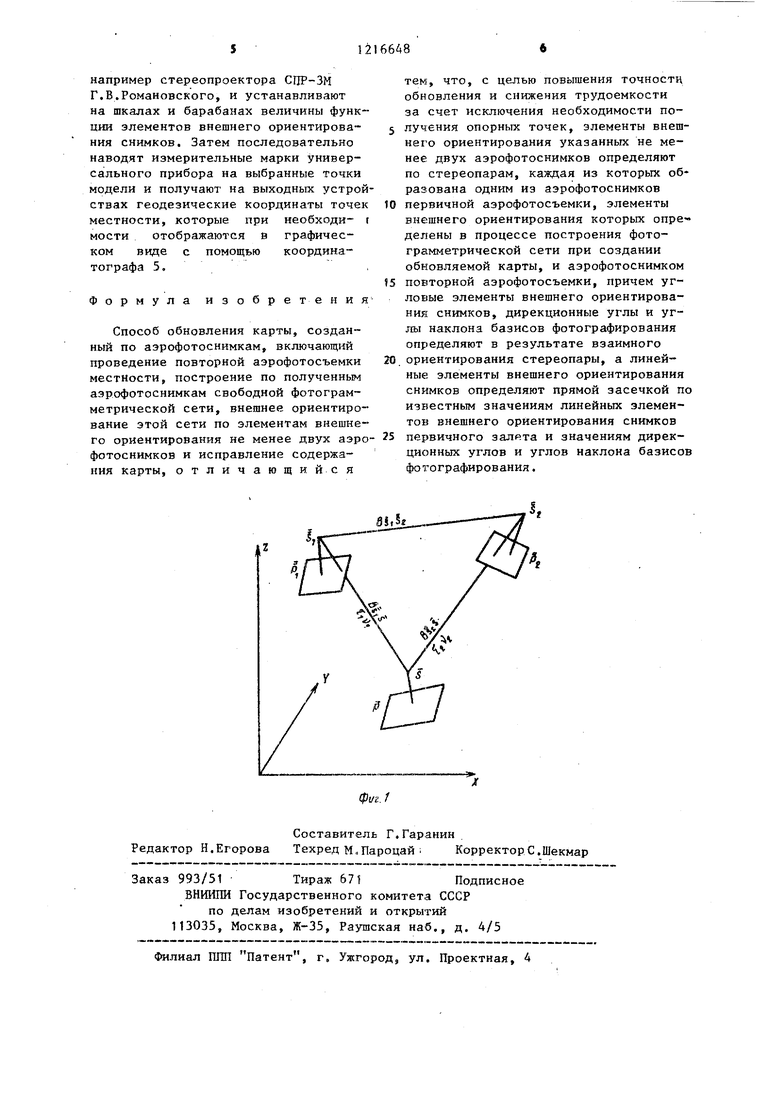
На фиг.1 представлена схема определения элементов внешнего ориенти- jj рования определяемого снимка; на иг.2 - схема осуществления способа остроения фотограмметрических сетей,
Сущность способа заключается в следующем.20
Образуют две или более стереопаы: опорный р. снимок старого заета - определяемый Р снимок(фиг.1) (элементы внешнего ориентирования опорных снимков известны). Аэрофото- 25 снимки каждой стереопары р. Р (i 1,2,..,) ориентируют взаимно по возможно большему количеству соответственных точек и определяют их элементы взаимного ориентирования, ,« По угловым элементам 04, , О. , Эв|; внешнего ориентирования каждого из опорных снимков Pj и. элементам ; ; , ; J oi , О) t,. взаимного ориентирования снимков Р( Р определяют ирекционные углы и углы наклона V; базисов В| - и фотографирования и угловые эле менты внешнего ориенти- рования аэрофотоснимка Р, Из двух или больше значений угловых элементов внешнего ориентирования снимка„ полученных йо двум или большему количеству стереопар, за окончательное значение принимают их средние или средневесовые значения:
35
40
снимка. Количество снимков, элементы внешнего ориентирования которых определяют изложенным способом, зависит от размеров и конфигурации сети. 2 ил.
е,Рле,Рг-.. р,-.
(1)
где 6 - соответственно элементы внешнего ориентирования и S 5 , чё (,3... номер стереопары), Р - веса.
По линейным элементам Х, У ,28, внешнего ориентирования опорных аэрофотоснимков Р; , дирекционным углам ; и углам Vj наклона бази i,S 1г§ фотографирования путем решения прямых пространственных засечек определяют линейные элементы Xg , Yg 5 внешнего ориентирования снимка Р по формулам
со5о,со5У,(в, ihVj-B, ginC cosVj) i 1
gJn J.COS V, SinVj-sinV, Vj
5 «
5
3tnC,cosV,(6y sinV,-S siflOjCosMj) s,
(z)
Y :Y -h
.1 5inc.,C06V,6in Vj-sin V, COS V
3inV,(6,j. oinVj-B. elno cosVj)
2 «z,
5 5iyiC,co5V,6;nVj-5mV,ein1JjC05Vj,
где oj , Vj - дирекционный угол и угол наклона базиса фотографи рования стереопары Р- р (,2,...),
§, Д:« ,5 координаты точки фотографирования снимка;
SY, ,/3 составляющие базиса фото-. 1 « графирования стереопары г, K.J, вычисляемые по формулам
8.
В.
Г«
2
, -2
§ г S,
(3)
Оценка точности полученных значений угловых элементов внешнего ориентирования производится при использовании двух и более стереопар, линейных - при использовании трех и более стереопар.
Полученные значения элементов внешнего ориентирования снимков Pj используют в качестве опорных данных при аналитическом или аналоговом построении фотограмметрических сетей или решении любых измерительных задач по стереопарам PJ Р:, ,
Предлагаемьй способ может быть осуществлен с использованием известных технических средств, объе;1инен- ных в комплекс.
Представленная на фиг,2 схема иллюстрирует два основных варианта осуществления способа сгущения .геодезической основы путем построения фотограмметрической сети в пределах
30
одиночной модели, маршрута или блока 20 электронную вычислительнзпо машину 2,
ЭВМ по программе производит построение фотограмметрической сети, т,е, определение координат X, Y , Z точек местности и элементов Х , Y ,
25 g . 0 , k) , Эе внешнего ориентирования всех снимков маршрута или блока маршрутов (кроме опорных снимков : ),
При аналоговом построении фотограмметрических сетей ( II вариант, фиг.2), например, с использованием стереокомпаратора СПР-ЗМ Г,В,Романовского при установке -в каретки при- бора снимков с известными элементами внешнего Ориентирования на шкалах и барабанах восстанавливают отсчеты, соответствующие элементам внешнего ориентирования, которые не изменяют в процессе построения маршрутной фотограмметрической сети в соответствии с известными технологическими приемами.
Для непосредственного исследования динамических процессов и собственно обновления.содержания топографической карты используют стерео пары аэрофотоснимков Р , элементы внешнего ориентирования которых получены в результате построения фотограмметрической сети, шш непосредственно снимки р. (стереопары Р Р:,.,),
маршрутов, а также исследования динамических процессов природной среды (равно как и собственно обновления топографической карты) аналитическим и аналоговым методами.
Комплекс состоит из стереокомпаратора 1, например СКА-18, электронной вычислительной машины 2, например серии ЕС, аналитического универсального стереофотограмметрического прибора 4, аналогового универсального стереофотограмметрического прибора 3, например стереопроектора Г.В.Романовского, и координатографа 5,
Для осуществления способа на стереокомпараторе 1 измеряют координаты соответственных точек стереопар fj Pj и фиксируют результаты на перфоленте. Перфоленту с измеренными на аэрофотоснимках координатам-га соответственных точек вводят в электронную вычислительную машину 2. ЭВМ по программе вычисляет элементы взаимного ориентирования снимков, дирекционные углы ; и углы наклона Vj базисов Bt г и В| фотографиро . 5, ь /.
35
40
вания, по формулам (1) - средние или средневесовые значения угловых элементов внешнего ориентирования
снимка Р , по формулам (2) - линей- Для этого устана;вливают снимки в ка-j ные элементы внешнего ориентирования ретки аналитического универсального снимка Р . Количество снимков Р; , стереофотограмметрического прибора 4
и вводят в запоминающее устройство ЭВМ прибора 4 элементы внешнего ори- 55 ентирования стереопары снимков Рц Р (илир. pj4,) или устанавливают снимки в каретки аналогового универсального стереофотограмметрического прибора 3,
Количество снимков Р; , элементы внешнего ориентирования которых определяют изложенным способом, зависит от размеров и конфигурации сети,I
Определив элементы внешнего ориентирования ряда снимков Р; нового залета, производят построение фотограмметрических сетей или, при исследовании динамических процессов, например природной среды, - определение коор- динат точек объектов исследования (равно как и съемку рельефа и контуров) по стереопарам Р- Pj , .
При построении фотограмметрических сетей аналитическим методом (1 вариант, фиг.2) производят измерения на стереокомпараторе 1 координат всех точек сети маршрута или блока снимков, фиксируют на перфоленте результаты всех измерений и значения элементов внешнего ориентирования снимков Р: , которые применительно к построению сети являются опорными. Перфоленту вводят в
например стереопроектора СПР-ЗМ Г,В.Романовского, и устанавливают на шкалах и барабанах величины функции элементов внешнего ориентирования снимков. Затем последовательно наводят измерительные марки универсального прибора на выбранные точки модели и получают на выходных устройствах геодезические координаты точек местности, которые при необходи- t мости отображаются в графическом виде с помощью координатографа 5,
Формула изобретения
Способ обновления карты, созданный по аэрофотоснимкам, включающий проведение повторной аэрофотосъемки местности, построение по полученным аэрофотоснимкам свободной фотограмметрической сети, внешнее ориентирование этой сети по элементам внешне- го ориентирования не менее двух аэро фотоснимков и исправление содержания карты, отличающийся
тем, что, с целью повышения точности обновления и снижения трудоемкости за счет исключения необходимости по- 5 лучения опорных точек, элементы внешнего ориентирования указанных не менее двух аэрофотоснимков определяют по стереопарам, каждая из которых образована одним из аэрофотоснимков
10 первичной аэрофотосъемки, элементы внешнего ориентирования которых определены в процессе построения фотограмметрической сети при создании обновляемой карты, и аэрофотоснимком
5 повторной аэрофотосъемки, причем угловые элементы внешнего ориентирования снимков, дирекционные углы и углы наклона базисов фотографирования определяют в результате взаимного
20. ориентирования стереопары, а линейные; элементы внешнего ориентирования снимков определяют прямой засечкой по известным значениям линейных элементов внешнего ориентирования снимков 25 первичного залр.та и значениям дирек- ционных углов и углов наклона базисов фотографирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ исправления топографической карты по аэрофотоснимкам стереопары | 1981 |
|
SU1000756A1 |
| Способ обновления топографической карты, созданной по аэрофотоснимкам | 1990 |
|
SU1797689A3 |
| СПОСОБ СОЗДАНИЯ ПЛАНОВО-ВЫСОТНОГО ОБОСНОВАНИЯ | 1994 |
|
RU2104488C1 |
| Способ пространственной фототриангуляции | 1958 |
|
SU121246A1 |
| СПОСОБ ПОЛУЧЕНИЯ НЕПРЕРЫВНОГО СТЕРЕОИЗОБРАЖЕНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ | 2024 |
|
RU2832645C1 |
| Способ определения пространственных координат точек местности | 1981 |
|
SU1064151A1 |
| Способ фотограмметрического определения координат точек местности | 1980 |
|
SU964444A1 |
| Универсальный стереоавтограф | 1960 |
|
SU134450A1 |
| Способ определения координат точек местности | 1977 |
|
SU705257A1 |
| Способ стереофотограмметрической съемки подвижных объектов | 1974 |
|
SU502222A1 |
Изобретение относится к области фотограмметрии, в частности к способам построения фотограмметрических сетей при обновлении топографических карт и исследования геометрических характеристик динамических процессов, например природной среды. Цель изобретения г повышение точности обновления и снижение трудоемкости за счет исключения необходимости получения опорных точек. Для осуществления способа на стереокомпараторе 1 измеряют координаты точек стереопар и фиксируют результат на перфоленте, которую вводят в электронно-вычислительную машину 2, в которой вычисляются элементы взаимного ориентирования сним ков, дирекционные углы и углы наклона базисов фотографирования. По К/} 
Составитель Г.Гаранин Редактор Н.Егорова Техред м.Пароцай ; Корректор С.Шекмар
Заказ 993/51 Тираж 671Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП Патент, г. Ужгород, ул. Проектная, 4
| Лобанов А.Н | |||
| Фототриангуляция с применением электронно-вычислительных машин | |||
| М.: Недра, 1971, с | |||
| Одновальный, снабженный дробителем, торфяной пресс | 1919 |
|
SU261A1 |
| Jerie H.G | |||
| Techniques, Evalia- tion and applications of acoxiliary 12 data in aerial trianqulation | |||
| Int | |||
| Arch | |||
| Photogr | |||
| Приспособление к индикатору для определения момента вспышки в двигателях | 1925 |
|
SU1969A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| , (54) СПОСОБ ОБНОВЛЕНИЯ КАРТЫ СОЗ- ДАННОЙ ПО АЭРОФОТОСНИМКАМ | |||
