Изобретение относится к способам навигационного ориентирования подводными плавсредствами (ППС) при движении по заданному маршруту.
В настоящее время освоение обширных арктических районов прилегающими к ним государствами требует существенного расширения их транспортной системы и транспортного обеспечения всей Арктической инфраструктуры с применением авиации, ледокольного флота, подводных обитаемых и необитаемых плавсредств.
Обеспечение точности навигационного ориентирования подводного плавсредства в арктических районах необходимо по следующим причинам [9]:
- увеличение погрешностей навигационных приборов ППС с течением времени следования по назначенному маршруту;
- непредвиденное изменение скорости и/или направления течения, изменяющие параметры движения ППС;
- наличие ледового покрова, препятствующего всплытию ППС на поверхность для уточнения места.
Особенно актуальной является задача обеспечения точности навигационного ориентирования ППС при следовании между пунктом отправления и пунктом назначения, маршрут между которыми следует через архипелажные районы с промежуточными островами, что приводит к многократным изменениям направления маршрута, вплоть до отсутствия прямолинейных участков и необходимости движения по траектории сложной криволинейной форме. Назначаемый маршрут ППС представляет собой последовательность прямолинейных галсов заданных направлений и протяженности. Поэтому в указанных условиях назначение маршрута ППС будет затруднено или становится невозможным.
Вместе с тем, между пунктом отправления и пунктом назначения обычно проложены подводные кабели и трубопроводы, проложенные по дну морей, которые могут служить навигационными ориентирами и использоваться в целях навигации ППС при назначении маршрута между пунктами, связанными подводными кабелями и трубопроводами.
Для навигационного ориентирования ППС по подводным кабелям и трубопроводам могут использоваться подводные трассоискатели. Так, например, известен трассоискатель или георадар, служащий для дистанционного обнаружения положения и направления трубопроводов и кабелей, расположенных под землей и на дне водоемов [2, 8]. Он представляет собой кабельный локатор, имеющий индуктивный щуп с генератором сигнала и идентификатор кабеля или трубопровода. С его помощью могут быть трассированы любые кабели и трубопроводы, вплоть до волоконно-оптических, особенно если они имеют металлические проводник (трос) или оплетку. Причем подводные оптоволоконные кабели практически всегда оснащены металлическими проводником или оплеткой. Не имеющие их оптоволоконные кабели снабжаются маркировочными лентами или маркерами с резонансными электромагнитными контурами, которые также обеспечивают их обнаружение с помощью трассоискателей.
Трассоискатели регистрируют электромагнитное поле, либо порождаемое сигналом в самом кабеле, либо возбужденное генератором электромагнитных колебаний, входящим в состав трассоискателя, и отраженное (рассеянное) трубопроводом, кабелем или маркерами [2, 5.]. Сигнал, поступающий в трассоискатель, усиливается и обрабатывается, в результате чего на фоне естественных помех выделяется полезный сигнал от металлического троса или оплетки.
В случае использования пары генератор-трассоискатель поиск называется активным. При поиске токоведущих кабелей трассоискатель может использоваться в пассивном режиме. Пассивным способом могут быть обнаружены и трассированы линии электропитания 50 Гц под нагрузкой, трубопроводы с катодной защитой (100 Гц), телефонные кабели по сигналам сигнализации (2-18 кГц), линии одно- или трехпрограммных радиотрансляционных сетей (300 Гц - 130 кГц), а также любые проводящие объекты, в которых электромагнитное поле порождается работающими в диапазоне длинных волн (140-300 кГц) радиопередатчиками и др. [3]. Для этих линий генератор сигнала не требуется, и поиск производится в пассивном режиме.
Подводные оптические кабели, как правило, бронированы [6]. Армирование защищает оптику от деятельности морских обитателей, а также сетей, тралов и якорей рыболовецких судов. Армирующая стальная оплетка располагается поверх слоя кевларовой защиты и придает кабелю достаточные жесткость и прочность для противодействия агрессивным механическим воздействиям извне.
Известные трассоискатели ТИС-5 (НТФ «Гидромастер») и ТИЭМ (НЛП «Форт-М») позволяют ППС обнаруживать подводные коммуникации. Так, судовой электромагнитный трассоискатель ТИЭМ определяет пространственное положение трубопроводов и кабелей на подводных переходах при глубинах водоема до 30 м [5].
Существует автоматизированный комплекс с электромагнитным судовым трассоискателем АМК СКАТ-ТИЭМ, который одновременно с электромагнитными измерениями выполняет и эхолотный промер [1]. Он может использоваться для динамического позиционирования ППС относительно кабеля и трубопровода по глубине на безопасном расстоянии от дна моря, не ающем дальность действия подводного трассоискателя. Малые массогабаритные характеристики и сравнительно большая дальность действия (до 30 м) трассопоисковой системы позволяют использовать ее в качестве навигационной системы подводного плавсредства при следовании его вдоль трассы трубопровода или кабеля, уложенного на дно водоема.
Известен способ обнаружения и определения положения и направления трассы трубопровода или кабеля, уложенного на дно водоема, принятый за прототип изобретения, основанный на применении трассопоисковой системы. Он предусматривает следующие действия [1, 4, 7]:
- вывод плавсредства в район расположения трассы кабеля или трубопровода, обеспечивающий их первоначальное обнаружение;
- перемещение плавсредства по акватории над трассой кабеля или трубопровода по системе ряда смежных взаимообратных галсов, пересекающих кабель или трубопровод;
- регистрация моментов пересечения трассы и с помощью расчетной программы определение положения и направления трассы кабеля или трубопровода.
Способ предназначен для определения положения кабеля или трубопровода и направления их трассы только в одном месте и не пригоден для обеспечения движения плавсредства вдоль трассы с ее использованием в качестве навигационного ориентира вследствие того, что система смежных взаимообратных галсов делает движение плавсредства вдоль трассы неэффективным по времени и затратам энергоресурсов.
Технической задачей и целью изобретения является разработка способа навигационного ориентирования подводного плавсредства по трассе подводного кабеля или трубопровода при назначении маршрута между пунктами отправления и назначения, связанными этим кабелем или трубопроводом. Способ ориентирован на применении именно на подводном плавсредстве в условиях отсутствия других средств навигационного обеспечения, например, при наличии ледового покрова в арктической зоне Российской Федерации (АЗРФ). Обычные надводные плавсредства в этих условиях для навигационного ориентирования могут использовать навигационное оборудование театра, например, радионавигационную систему [10].
Для достижения цели изобретения предлагается способ навигационного ориентирования подводного плавсредства по трассе подводного кабеля или трубопровода при назначении маршрута между пунктами отправления и назначения, связанными этим кабелем или трубопроводом, при котором:
- выводят подводное плавсредство в район расположения трассы кабеля или трубопровода,
- позиционируют подводное плавсредство по глубине на безопасном расстоянии от дна моря, не превышающем дальность действия подводного трассоискателя,
- перемещают подводное плавсредство по акватории до первого пересечения кабеля или трубопровода,
- регистрируют пересечение трассы,
отличающийся тем, что
- по известному направлению трассы кабеля или трубопровода в начальной точке маршрута подводного плавсредства задают курс первого галса с малым отклонением от направления трассы, обеспечивающий пересечение трассы,
- по окончании первого галса после пересечения трассы изменяют курс подводного плавсредства в противоположную сторону с удвоенным отклонением для обеспечения повторного пересечения трассы кабеля или трубопровода,
- при отсутствии пересечения с трассой кабеля или трубопровода в расчетное время повторно изменяют курс подводного плавсредства с удвоенным отклонением от предыдущего галса в том же направлении до момента пересечения с трассой кабеля или трубопровода,
- повторяют маневрирование подводного плавсредства по этим правилам по максимально спрямленному зигзагообразному маршруту с последовательными пересечениями трассы в противоположных направлениях до момента достижения подводным плавсредством пункта назначения.
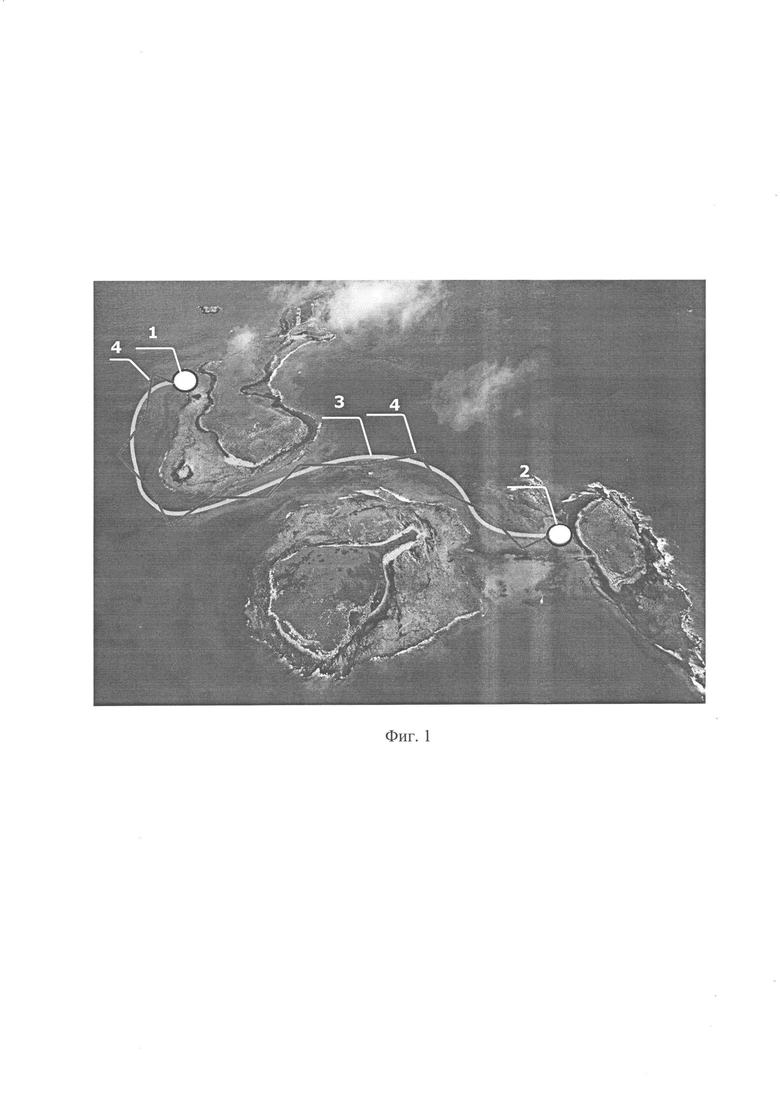
Реализация способа навигационного ориентирования подводного плавсредства по трассе подводного кабеля или трубопровода при назначении маршрута между пунктами отправления и назначения, связанными этим кабелем или трубопроводом, показана на фиг. 1. Цифрами обозначены: 1 - пункт отправления подводного плавсредства, 2 - пункт назначения подводного плавсредства, 3 - трасса подводного кабеля или трубопровода, совпадающая с маршрутом подводного плавсредства, 4 - зигзагообразный маршрут подводного плавсредства с системой прямолинейных галсов вдоль трассы подводного кабеля или трубопровода с последовательными пересечениями трассы в противоположных направлениях.
Техническим результатом изобретения служит способ навигационного ориентирования подводного плавсредства по трассе подводного кабеля или трубопровода, позволяющий ему в необеспеченных навигационным оборудованием районах перемещаться в пункт назначения вдоль трассы проложенного подводного кабеля или трубопровода при назначении маршрута между пунктами отправления и назначения, связанными этим кабелем или трубопроводом.
Источники информации, использованные при выявлении изобретения и составлении его описания:
1. АМК «СКАТ» для подводных переходов. НПП «Форт XXI». М.: 2006. URL:.https://www.fort21.m/kom - Дата обращения 05.10.2021.
2. Иванцов И. Трассировка и идентификация кабельных линий // Открытые системы. - Журнал сетевых решений LAN. 2002, №07-08.
3. Классификация оптических кабелей связи // Статьи о кабеле и электротехнике. - URL: https://kabel-s.ru/blog/interesnoe-o-kabele/klassifikaciya-opticheskih-kabeley-svyazi/ - Дата обращения 06.10.2021.
4. Метод позиционирования автономного необитаемого подводного аппарата в процессе приведения к причальному устройству. / М.П. Колесников, Л.А. Мартынова, И.В. Пашкевич, П.С.Шелест // Известия ТулГУ. Технические науки. - 2015. Вып. 11. Ч. 2.
5. Научно-производственное предприятие «Форт XXI». - URL: https://www.fort21.ru/ - Дата обращения 05.10.2021.
6. Оптоволоконные. Как устроен оптоволоконный кабель.-DieselStaff. -URL: https://m-gen.ru// -- Дата обращения 06.10.2021.
7. Павин A.M. Разработка алгоритмов поиска и обследования искусственных протяженных объектов с помощью автономного необитаемого подводного аппарата. Автореферат диссертации на соискание ученой степени кандидата технических наук. Владивосток, 2010.
8. Подводные археологические исследования с помощью георадара "ЛОЗА" в морских и пресноводных водоемах / А.Г. Васильев, В.В. Копейкин, П.А. Морозов, П.В. Хлебопашев, П.Л. Боровский // Фонд подводных археологических исследований им. В.Д. Блаватского; ВНИИСМИ, Институт океанологии РАН; ВНИИСМИ, Институт археологии РАН. - 2007. - 5 с.
9. Роботизированная транспортная система с использованием автономных необитаемых подводных аппаратов / А.И. Осадчий, В.И. Поленин // Информация и космос №2,2020. - С. 62-68.
10. Судовые радионавигационные системы: Учебник для ВУЗов / Ю.М. Устинова, В.В. Афанасьев, А.Н. Маринич, А.В. Припотнюк. - М.: изд-во Проспект.2010. - 312 с.
Изобретение относится к способам навигационного ориентирования подводными плавсредствами при движении по заданному маршруту. Способ навигационного ориентирования подводного плавсредства по трассе подводного кабеля или трубопровода включает выведение подводного плавсредства в район расположения трассы кабеля или трубопровода, позиционирование подводного плавсредства по глубине на безопасном расстоянии от дна моря, не превышающем дальность действия подводного трассоискателя. Далее перемещают подводное плавсредство по акватории до первого пересечения кабеля или трубопровода, регистрируют пересечение трассы. При этом по известному направлению трассы кабеля или трубопровода в начальной точке маршрута подводного плавсредства задают курс первого галса с малым отклонением от направления трассы, обеспечивающий пересечение трассы, по окончании первого галса после пересечения трассы изменяют курс подводного плавсредства в противоположную сторону с удвоенным отклонением для обеспечения повторного пересечения трассы кабеля или трубопровода. При отсутствии пересечения с трассой кабеля или трубопровода в расчетное время повторно изменяют курс подводного плавсредства с удвоенным отклонением от предыдущего галса в том же направлении до момента пересечения с трассой кабеля или трубопровода, повторяют маневрирование подводного плавсредства по этим правилам по максимально спрямленному зигзагообразному маршруту с последовательными пересечениями трассы в противоположных направлениях до момента достижения подводным плавсредством пункта назначения. Технический результат – обеспечение возможности навигационного ориентирования подводного плавсредства по трассе подводного кабеля или трубопровода в условиях отсутствия других средств навигационного обеспечения. 1 ил.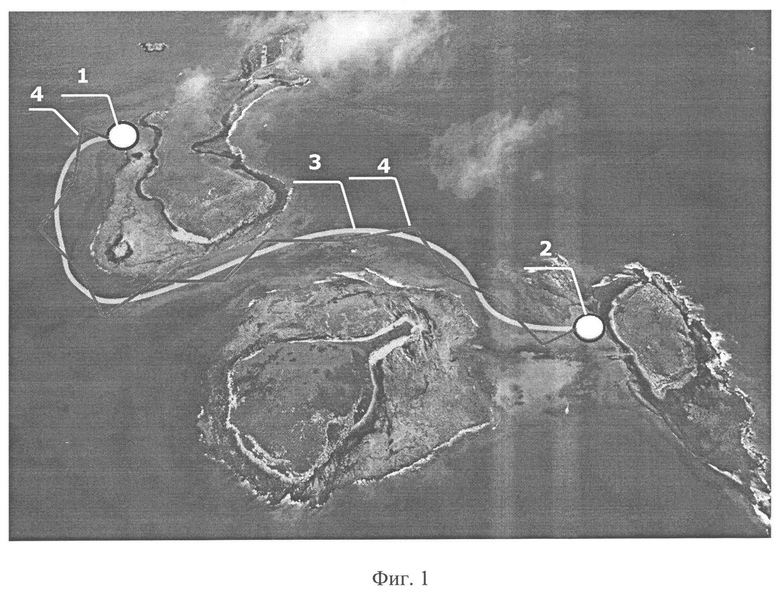
Способ навигационного ориентирования подводного плавсредства по трассе подводного кабеля или трубопровода, при котором выводят подводное плавсредство в район расположения трассы кабеля или трубопровода, позиционируют подводное плавсредство по глубине на безопасном расстоянии от дна моря, не превышающем дальность действия подводного трассоискателя, перемещают подводное плавсредство по акватории до первого пересечения кабеля или трубопровода, регистрируют пересечение трассы, отличающийся тем, что по известному направлению трассы кабеля или трубопровода в начальной точке маршрута подводного плавсредства задают курс первого галса с малым отклонением от направления трассы, обеспечивающий пересечение трассы, по окончании первого галса после пересечения трассы изменяют курс подводного плавсредства в противоположную сторону с удвоенным отклонением для обеспечения повторного пересечения трассы кабеля или трубопровода, при отсутствии пересечения с трассой кабеля или трубопровода в расчетное время повторно изменяют курс подводного плавсредства с удвоенным отклонением от предыдущего галса в том же направлении до момента пересечения с трассой кабеля или трубопровода, повторяют маневрирование подводного плавсредства по этим правилам по максимально спрямленному зигзагообразному маршруту с последовательными пересечениями трассы в противоположных направлениях до момента достижения подводным плавсредством пункта назначения.
| СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА И САМОХОДНЫЙ ПОДВОДНЫЙ АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2710791C1 |
| Устройство для обнаружения и отслеживания металлосодержащего протяженного подводного объекта с борта подводной поисковой установки | 2021 |
|
RU2765337C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ПОДВОДНОГО ТРУБОПРОВОДА | 2011 |
|
RU2472178C1 |
| US 10183732 B2, 22.01.2019. | |||

