ОБЛАСТЬ ИЗОБРЕТЕНИЯ
[1] Данное раскрытие относится к способу управления для работы электродвигателя в условиях обратного вращения. Данное раскрытие также относится к устройству регулирования скорости привода, способному управлять работой электродвигателя в условиях обратного вращения.
УРОВЕНЬ ТЕХНИКИ
[2] Системы, в которых задействована движущая нагрузка, такие как насосные системы, используемые, например, в извлечении нефти и других жидкостей, могут включать в себя электродвигатель и устройство регулирования скорости привода. Устройство регулирования скорости привода регулирует количество электроэнергии, подаваемой на двигатель. Затем двигатель преобразует электроэнергию в механическую энергию, для нагрузки привода, такой как подъем столба текучей среды в случае насосных систем.
[3] При прекращении подачи электроэнергии на устройство регулирования скорости привода, например, при прекращении подачи электроэнергии, двигатель претерпевает процесс отключения. Исходно, импульс нагрузки заставляет двигатель продолжать вращение в прямом направлении в течение короткого периода времени. Затем, под действием движущей нагрузки, двигатель прекратит вращение в прямом направлении и начнет вращаться в обратном направлении.
[4] В ходе процесса отключения, вращение двигателя будет генерировать электроэнергию, которая будет подаваться назад, в устройство регулирования скорости привода. Эта электроэнергия может быть использована устройством регулирования скорости привода для поддержания работы и управления скоростью обратного вращения двигателя, с предотвращением, таким образом, неконтролируемого обратного вращения, которое может достичь скоростей за пределами номинальной скорости системы.
[5] Электроэнергия, генерируемая двигателем, в ходе отключения может превышать потребности устройства регулирования скорости привода. В некоторых случаях, избыточная энергия может рассеиваться через резистор, с преобразованием избыточной электроэнергией в тепло. Однако, это является неэффективным решением, поскольку рассеянную энергию система не использует. Закупка и техническое обслуживание резистора также повышает общую стоимость системы.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[6] Задача настоящего раскрытия состоит в поддержании двигателя с обратным вращением в состоянии, когда электроэнергия, генерируемая двигателем, сопоставима с электроэнергией, используемой приводом с переменным вращением, для снижения или даже устранения необходимости в рассеивании энергии.
[7] В настоящем раскрытии описан способ управления, воплощенный в устройстве регулирования скорости привода, для управления электродвигателем при обратном вращении, причем способ содержит:
- определение с помощью устройства регулирования скорости привода значения механической мощности, возникающей при скорости обратного вращения, и расчетного крутящего момента нагрузки;
- определение с помощью устройства регулирования скорости привода конкретного профиля электрических потерь, возникающих на уровне магнитного потока двигателя, в котором конкретный профиль электрических потерь совпадает со значением механической мощности;
- определение с помощью устройства регулирования скорости привода эталонного магнитного потока и эталонной скорости, применяемой к двигателю, для достижения совпадения с конкретным профилем электрических потерь;
- регулирование с помощью устройства регулирования скорости привода скорости обратного вращения двигателя для поддержания совпадения с конкретным профилем электрических потерь.
[8] Такой способ управления позволяет двигателю, вращающемуся в обратном направлении, функционировать в состоянии, когда мощность, генерируемая двигателем, сопоставима с мощностью, используемой для поддержания работы устройства регулирования скорости привода и управления двигателем, с учетом электрических потерь системы. Генерируется небольшая избыточная мощность или не генерируется вовсе, и рассеивающий резистор в системе может не использоваться.
[9] Опционально, регулирование скорости обратного вращения двигателя содержит повторное определение конкретного профиля электрических потерь для корректировки эталонного магнитного потока. Корректировка эталонного магнитного потока позволяет двигателю поддерживать желаемую скорость обратного вращения при изменении возникающих электрических потерь. Корректировка эталонного магнитного потока позволяет оптимизировать совпадение в случае изменения крутящего момента нагрузки.
[10] Опционально, регулирование скорости обратного вращения двигателя содержит извлечение из конкретного профиля электрических потерь значения электрических потерь, возникающих при расчетном крутящем моменте нагрузки, и корректировку эталонной скорости до достижения скорости обратного вращения, соответствующей значению электрических потерь. Корректировка эталонной скорости позволяет использовать одиночный конкретный профиль электрических потерь для регулирования скорости. Такая корректировка способствует улучшению совпадения в случае изменения крутящего момента нагрузки.
[11] Опционально, способ может содержать повторное определение конкретного профиля электрических потерь для корректировки эталонного магнитного потока, извлечение из конкретного профиля электрических потерь значения электрических потерь, возникающих при расчетном крутящем моменте нагрузки, и корректировку эталонной скорости до достижения скорости обратного вращения, соответствующей значению электрических потерь. Сочетание корректировки, как эталонного магнитного потока, так и эталонной скорости может повысить надежность и быстродействие регулирования скорости обратного вращения.
[12] Опционально, способ содержит определение профиля максимальных электрических потерь и проверку того, чтобы значение электрических потерь, возникающих при скорости обратного вращения, и расчетного крутящего момента нагрузки находились ниже профиля максимальных электрических потерь. Такая проверка обеспечивает, чтобы регулирование скорости обратного вращения осуществлялось в пределах допустимых электрических потерь. Можно найти совпадение между значением механической мощности и конкретным профилем электрических потерь.
[13] Опционально, регулирование скорости обратного вращения двигателя осуществляют до достижения заданного порогового значения. Такая конфигурация позволяет осуществлять регулирование скорости обратного вращения до того, как регулирование скорости станет необязательным, или работа двигателя станет несовместима со способом.
[14] Опционально, заданное пороговое значение представляет собой по меньшей мере одно значение из группы, содержащей: минимальный крутящий момент нагрузки, минимальное значение механической мощности, максимальная скорость обратного вращения. Минимальный крутящий момент нагрузки может указывать на то, что механическая мощность, генерируемая для поддержания работы устройства регулирования скорости привода, обеспечивается при скорости обратного вращения выше номинальной скорости системы. Может быть предпочтительным отключение устройства регулирования скорости привода. Минимальное значение механической мощности может указывать на то, что двигатель нельзя подвергать воздействию высокого крутящего момента нагрузки. Двигатель может не разогнаться, если он лишен возможности регулировать скорость обратного вращения. Максимальная скорость обратного вращения может указывать на то, что скорость, требуемая для поддержания совпадения между конкретным профилем электрических потерь и значением механической мощности, будет выше номинальной скорости системы. Может быть предпочтительным отключать устройство регулирования скорости привода.
[15] Опционально, скорость обратного вращения представляет собой заданную скорость обратного вращения. Заданная скорость обратного вращения может давать оператору возможность выбирать желаемую скорость обратного вращения, применяемую к двигателю при обратном вращении. Заданную скорость обратного вращения можно выбрать, исходя из применения. Опционально, заданная скорость обратного вращения выбрана из группы, содержащей медленную, среднюю и быструю скорость обратного вращения. Такие варианты могут облегчить выбор заданной скорости обратного вращения.
[16] Опционально, определение конкретного профиля электрических потерь содержит выбор конкретного профиля электрических потерь из нескольких профилей электрических потерь, возникающих при множестве уровней магнитного потока двигателя. Ограничение количества имеющихся профилей электрических потерь может облегчить определение конкретного профиля электрических потерь.
[17] Опционально, множество уровней магнитного потока находятся в диапазоне от 10% номинального магнитного потока до 150% номинального магнитного потока. Такие уровни магнитного потока двигателя могут соответствовать профилям электрических потерь, которые, скорее всего, совпадают со значением механической мощности.
[18] Опционально, способ содержит выбор того, включает ли регулирование скорости обратного вращения двигателя изменение эталонного магнитного потока и/или эталонной скорости. Таким образом, оператор может выбрать, возникнет ли управление двигателем при фиксированной эталонной скорости, или может ли изменяться скорость обратного вращения. Оператор также может выбрать, будет ли работать двигатель при фиксированном эталонном магнитном потоке, или может ли изменяться магнитный поток. Гибкость способа при этом повышается.
[19] Опционально, способ содержит выявление с помощью устройства регулирования скорости привода обратного вращения двигателя. Такое выявление позволяет устройству регулирования скорости привода реализовывать способ при возникновении обратного вращения.
[20] Опционально, способ содержит применение способа после прекращения подачи электроэнергии. Прекращение подачи электроэнергии может быть выявлено, и это может указывать на то, что двигатель может иметь обратное вращение. Такое выявление позволяет устройству регулирования скорости привода реализовывать способ при возникновении обратного вращения.
[21] Настоящее раскрытие также описывает устройство регулирования скорости привода электродвигателя, содержащий процессор и память, причем процессор выполнен с возможностью функционирования согласно любому из способов, описанных в настоящей работе.
[22] Настоящее раскрытие также описывает компьютерно-читаемый носитель данных, содержащий команды, которые при выполнении на процессоре предписывают процессору осуществлять любой из способов, описанных в настоящей работе.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
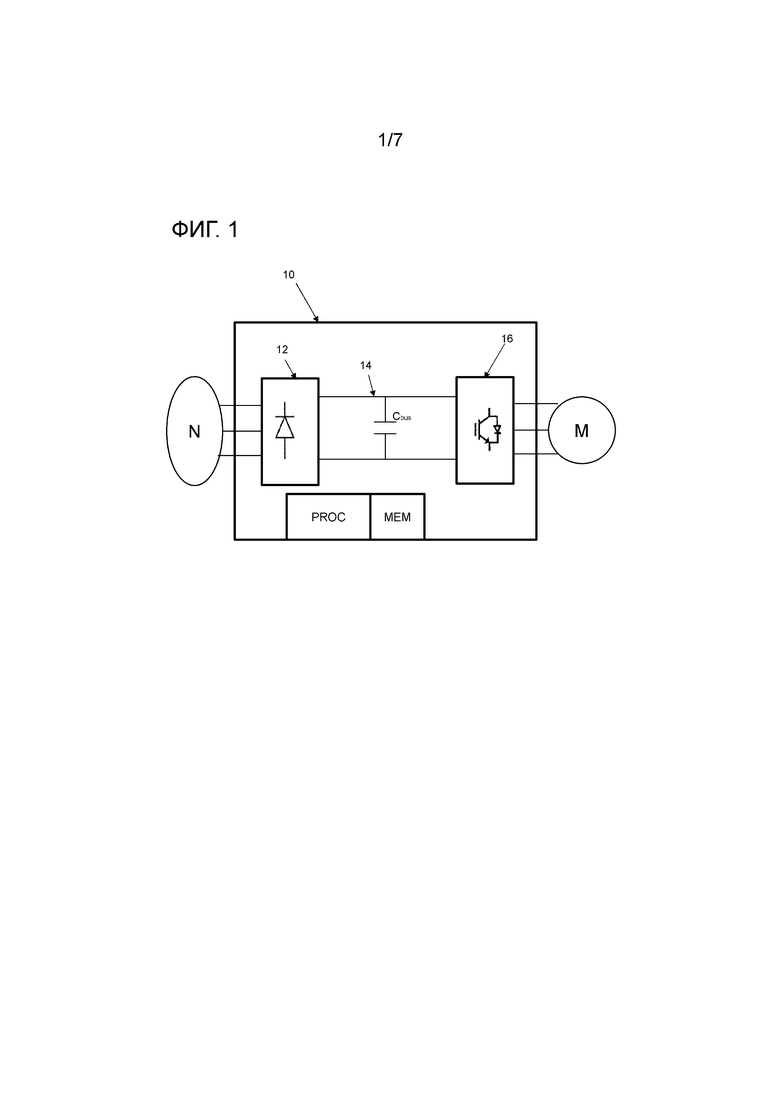
[23] Фиг. 1 схематически иллюстрирует пример устройства регулирования скорости привода, подключенного к электрической сети и к двигателю.
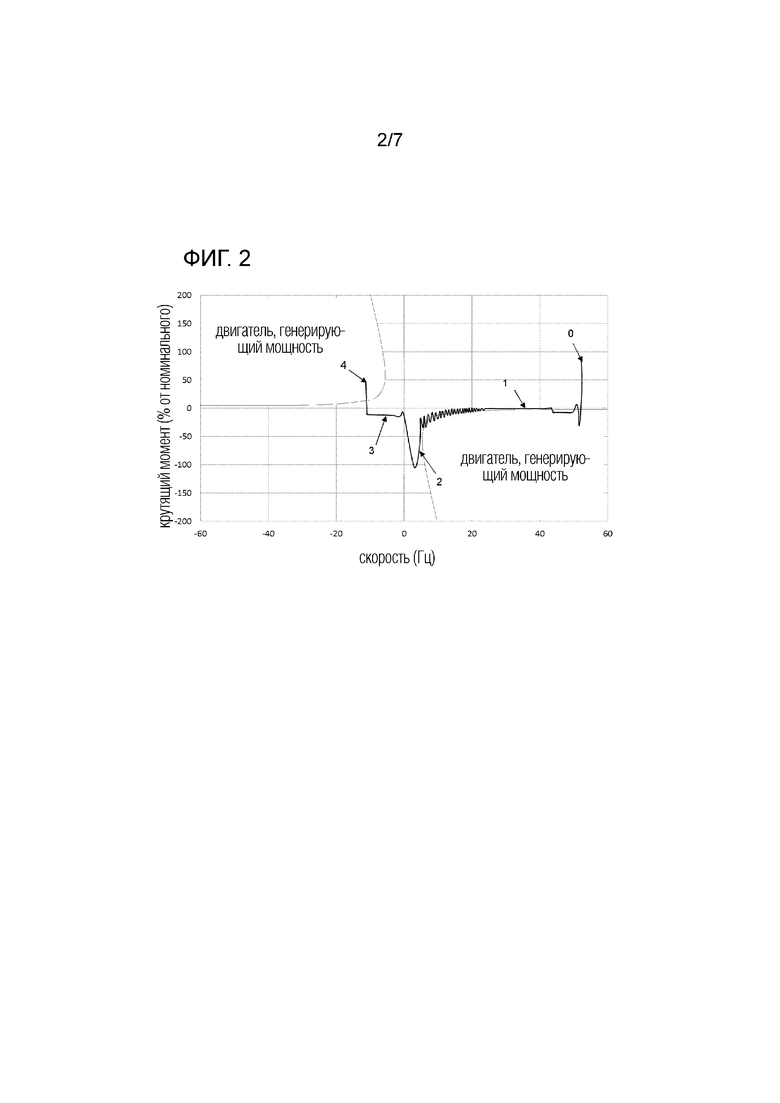
[24] Фиг. 2 иллюстрирует схематически пример устройства регулирования скорости привода, регулирующего скорость обратного вращения двигателя после прекращения подачи электроэнергии.
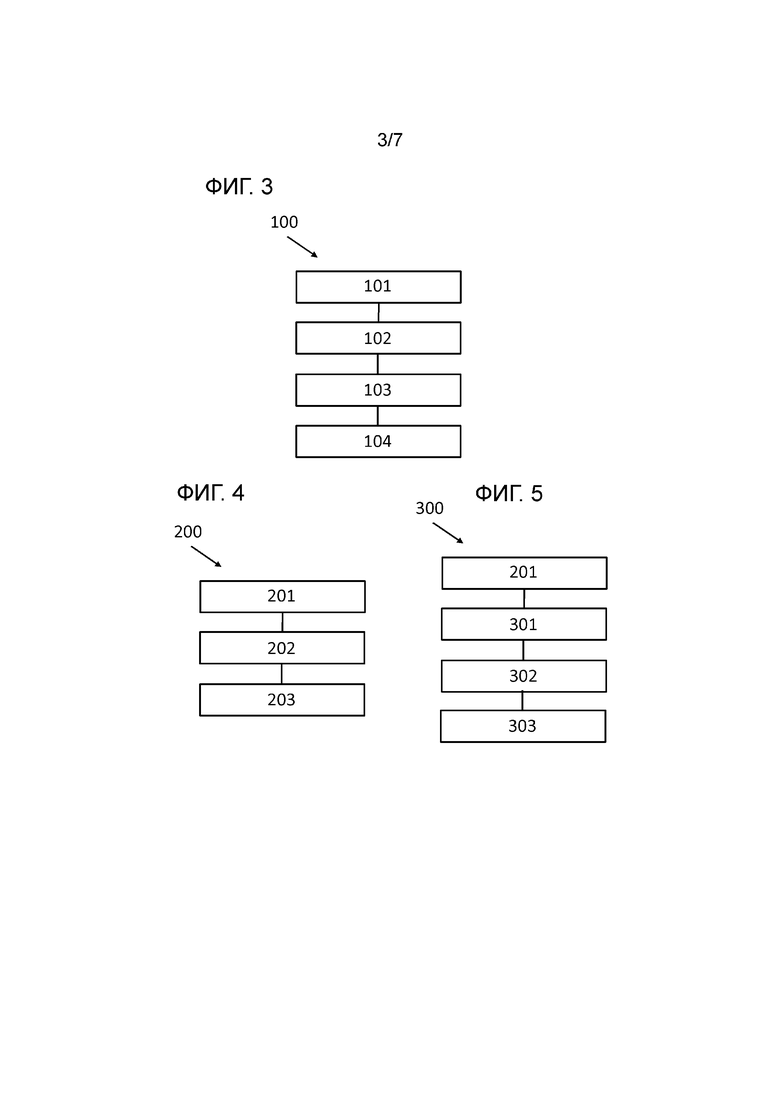
[25] Фиг. 3 иллюстрирует примерный способ.
[26] Фиг. 4 иллюстрирует другой примерный способ.
[27] Фиг. 5 иллюстрирует еще один примерный способ.
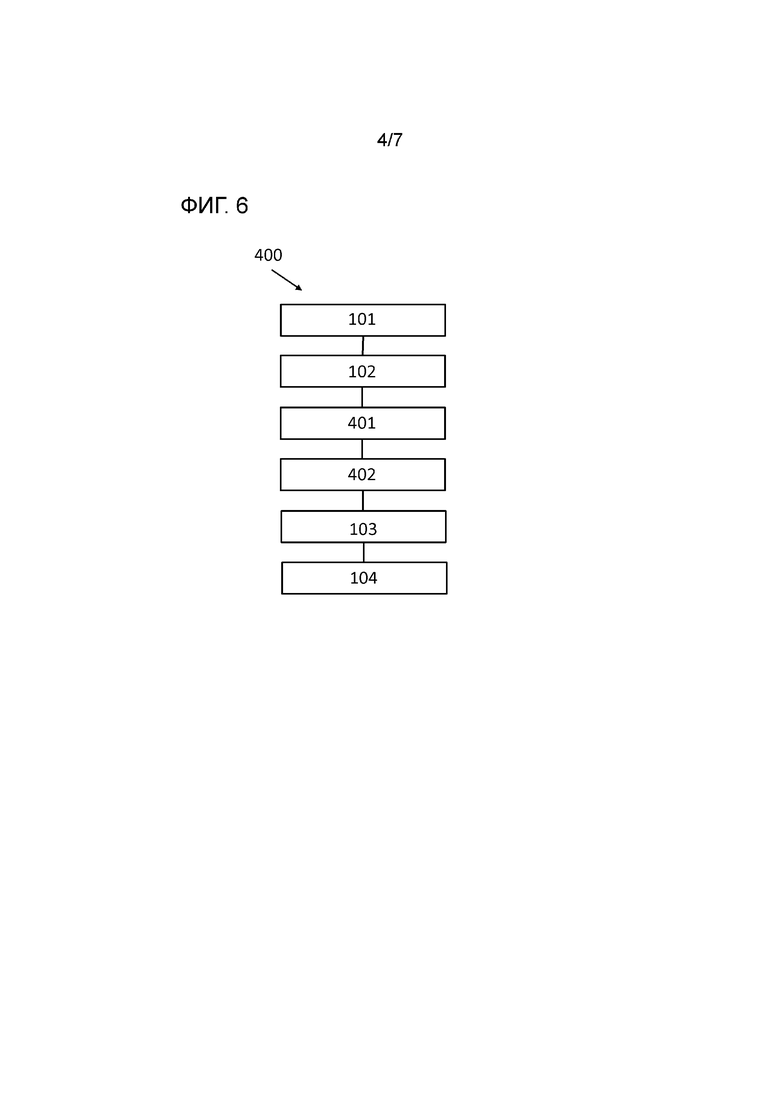
[28] Фиг. 6 иллюстрирует еще один примерный способ.
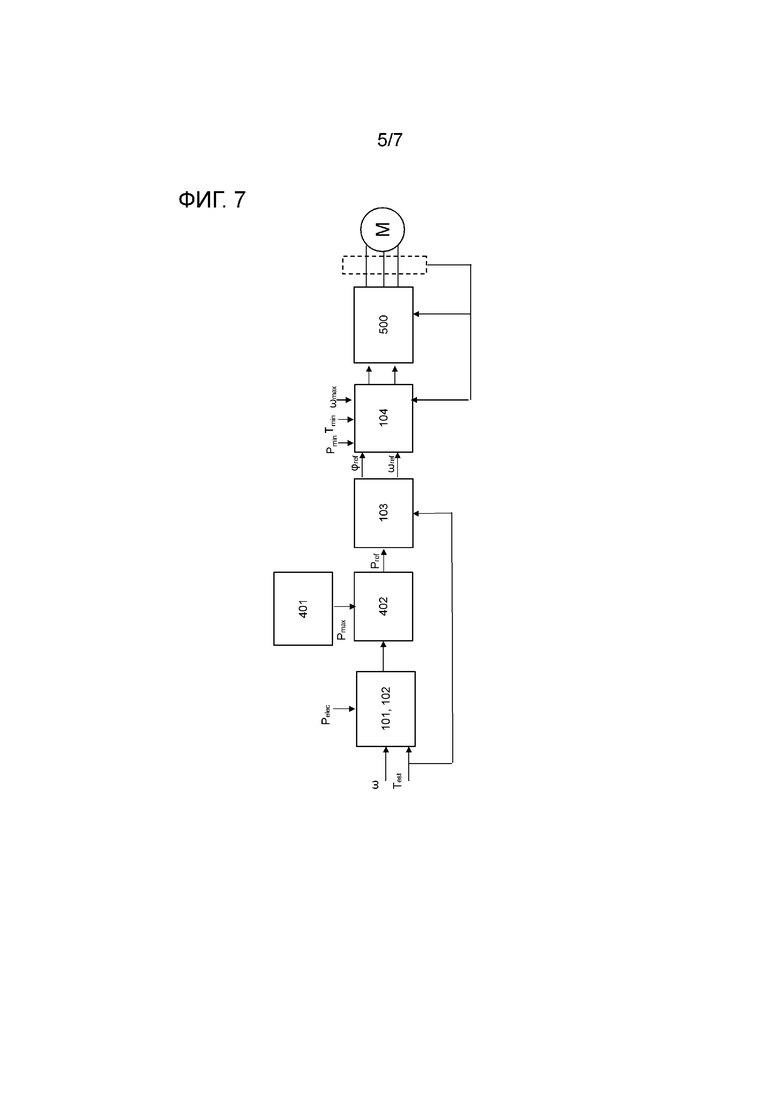
[29] Фиг. 7 иллюстрирует пример системы управления для воплощения способов по настоящему раскрытию.
[30] Фиг. 8 иллюстрирует пример этапа, проиллюстрированного на Фиг. 7.
[31] Фиг. 9 иллюстрирует пример другого этапа, показанного на Фиг. 7.
[32] Фиг. 10 иллюстрирует пример другого этапа, показанного на Фиг. 7.
[33] Фиг. 11 иллюстрирует другой пример этапа по Фиг. 7.
ПОДРОБНОЕ ОПИСАНИЕ
[34] Данное раскрытие применимо к управлению электродвигателем с помощью устройства регулирования скорости привода. Устройство регулирования скорости привода в данном раскрытии следует понимать как электронный, смоделированный или программно реализованный блок управления для электродвигателя.
[35] Как и в примере, проиллюстрированном на Фиг. 1, устройство 10 регулирования скорости привода может быть подключено, с одной стороны, к электрической сети N, а с другой стороны к электродвигателю M. Устройство 10 регулирования скорости привода может содержать модуль 12 инвертора, шину 14 питания постоянного тока (DC-шину питания) и модуль 16 преобразователя.
[36] Модуль 12 инвертора может содержать диодный мост, выполненный с возможностью преобразования трехфазного напряжения переменного тока (трехфазного AC-напряжения), обеспечиваемого электрической сетью N, в DC-напряжение. DC-напряжение, выводимое модулем 12 инвертора, может быть приложено к DC-шине 14 питания.
[37] DC-шина 14 питания может содержать две линии питания, соединенные между собой через конденсатор шины Cbus, выполненный с возможностью стабилизации напряжения шины 14. Вывод DC-шины 14 питания может быть подключен к модулю 16 преобразователя.
[38] Модуль 16 преобразователя может содержать несколько рычагов переключателей, каждый из которых содержит силовые транзисторы, например, типа IGBT (Insulated Gate Bipolar Transistor, биполярный транзистор с изолированным затвором). Модуль 16 преобразователя может быть предназначен для отключения напряжения, подаваемого DC-шиной 14 питания, для достижения переменного выходного напряжения, подаваемого на электродвигатель M.
[39] Устройство 10 регулирования скорости привода может содержать процессор PROC, причем процессор PROC выполнен с возможностью функционирования согласно любому из способов, описанных в настоящей работе. Процессор PROC может содержать электронные цепи для осуществления вычислений, управляемых операционной системой.
[40] Устройство 10 регулирования скорости привода может содержать некратковременный компьютерно-читаемый или считываемый компьютером носитель данных, такой как, например, память или запоминающее устройство MEM, вследствие чего энергонезависимый компьютерно-читаемый носитель данных кодируется с помощью команд, исполняемых процессором, таким как процессор PROC, причем компьютерно-читаемый носитель данных содержит команды для функционирования процессора PROC, для выполнения в соответствии с любым из примерных способов, описанных в настоящей работе. Компьютерно-читаемое запоминающее устройство согласно данному раскрытию может представлять собой любое электронное, магнитное, оптическое или другое физическое устройство хранения, которое сохраняет исполняемые команды. Компьютерно-читаемое запоминающее устройство может представлять собой, например, оперативное запоминающее устройство (Random Access Memory, RAM), электрически стираемую программируемую постоянную память (Electrically Erasable Programmable Read Only Memory, EEPROM), накопитель и оптический диск, и т.п. Как описано в настоящей работе, компьютерно-читаемое запоминающее устройство может быть закодировано с помощью исполняемых команд согласно способам, описанным в настоящей работе. Устройство хранения или память может включать в себя любое электронное, магнитное, оптическое или другое физическое устройство хранения, которое сохраняет исполняемые команды как описано в настоящей работе.
[41] Устройство 10 регулирования скорости привода согласно данному раскрытию подключено к приводной нагрузке. Под приводной нагрузкой следует понимать, что двигатель M может приводить в действие нагрузку, или наоборот, нагрузка может приводить в действие двигатель M. Когда двигатель приводит в действие нагрузку, электрическая мощность потребляется двигателем M, с получением механической мощности. И наоборот, когда нагрузка приводит в действие двигатель M, нагрузка прикладывает крутящий момент нагрузки к двигателю для вращения двигателя M, с получением электрической мощности. Электрическую мощность можно понимать как произведение напряжения и тока. Механическую мощность можно понимать как произведение скорости и крутящего момента.
[42] Фиг. 2 иллюстрирует режим работы электродвигателя M при прекращении подачи электроэнергии. Прекращение подачи электроэнергии возникает, когда напряжение, подаваемое электрической сетью N на устройство 10 регулирования скорости привода, отключается. Прекращение подачи электроэнергии может возникнуть перед применением способов, описанных в настоящей работе. Прекращение подачи электроэнергии может быть выявлено, и тогда запускаются способы, описанные в настоящей работе.
[43] После прекращения подачи электроэнергии, возникающего в позиции (0) на Фиг. 2, крутящий момент, генерируемый электродвигателем M, может падать. Как проиллюстрировано в позиции (1) на Фиг. 2, электродвигатель M может замедлять скорость под действием крутящего момента нагрузки. Двигатель M может генерировать электрическую мощность, которую можно сохранить с помощью конденсатора Cbus DC-шины питания, что приводит к повышению напряжения DC-шины.
[44] Двигатель M может достигать области скорости, близкой к нулевой, в позиции (2) на Фиг. 2, в которой электродвигатель M больше не может генерировать электрическую мощность. Напряжение шины может падать, из-за электрических потерь, возникающих в устройстве 10 регулирования скорости привода и в электродвигателе M. Во избежание отключения устройства 10 регулирования скорости привода, возникающего, когда напряжение шины снижается ниже критического уровня, электрическая мощность, сохраняемая конденсатором Cbus DC-шины питания, может быть использована для установления обратного вращения. Обратное вращение следует понимать как вращение двигателя M в обратную сторону. Обратное вращение может быть установлено двигателем M, генерирующим механическую мощность, для повышения скорости двигателя M в обратном направлении, как проиллюстрировано в позиции (3) на Фиг. 2.
[45] При обратном вращении, электродвигатель M может ускоряться под действием крутящего момента нагрузки. Двигатель M может генерировать электрическую мощность, которая может быть сохранена конденсатором Cbus шины, что приводит к повышению напряжения DC-шины. Неконтролируемое обратное вращение может быть нежелательным по многим причинам. Например, такой причиной может быть достижение скоростей обратного вращения выше номинальной скорости двигателя M, что может повредить оборудование или может оказаться небезопасным для персонала. Некоторая часть мощности, генерируемой электродвигателем M, может быть использована устройством 10 регулирования скорости привода для регулирования скорости обратного вращения двигателя M. Регулирование скорости обратного вращения может быть достигнуто двигателем M, генерирующим механическую мощность, для противодействия воздействию нагрузки. Механическая мощность может образовывать резистивный крутящий момент, обеспечиваемый для поддержания скорости обратного вращения двигателя M при желаемом значении. Это проиллюстрировано на позиции (4) на Фиг. 2. Однако, может генерироваться некоторая избыточная мощность, соответствующая электрической мощности, генерируемой двигателем M при обратном вращении, которая не сохраняется и не используется устройством 10 регулирования скорости привода для регулирования скорости обратного вращения.
[46] Фиг. 3 иллюстрирует пример способа 100 согласно данному раскрытию. Способ, проиллюстрированный на Фиг. 3, осуществляют, например, посредством устройства 10 регулирования скорости привода, для управления электродвигателем M при обратном вращении.
[47] Как проиллюстрировано в блоке 101, способ 100 содержит определение значения механической мощности Pmech. Под значением механической мощности Pmech следует понимать мощность, генерируемую электродвигателем M. Значение механической мощности можно рассчитать из скорости ω обратного вращения двигателя и из расчетного крутящего момента нагрузки Test.
[48] Как проиллюстрировано в блоке 102, способ 100 содержит определение конкретного профиля электрических потерь Pref. Под электрическими потерями следует понимать потери мощности, возникающие на двигателе M и в устройстве 10 регулирования скорости привода. Электрические потери могут содержать потери на двигателе и потери в устройстве регулирования скорости привода. Электрические потери можно рассчитать из характеристик двигателя. Электрические потери могут изменяться в зависимости от скорости двигателя, от крутящего момента и от уровня магнитного потока. Таким образом, профиль электрических потерь Pelec может представлять электрические потери, возникающие на уровне магнитного потока для любой скорости двигателя и любого крутящего момента. Конкретный профиль электрических потерь Pref представляет собой профиль электрических потерь, для которого значение механической мощности Pmech может совпадать с возникающими электрическими потерями. Таким образом, мощность, генерируемая электродвигателем M, сопоставима с мощностью, требуемой для устройства 10 регулирования скорости привода, чтобы оставаться в рабочем состоянии и регулировать скорость обратного вращения двигателя M.
[49] Как проиллюстрировано в блоке 103, конкретный профиль электрических потерь Pref можно использовать для определения эталонного магнитного потока ϕref и эталонной скорости ωref. Эталонный магнитный поток ϕref может соответствовать уровню магнитного потока, связанному с конкретным профилем электрических потерь Pref. Эталонная скорость ωref может соответствовать скорости обратного вращения, при которой значение механической мощности Pmech совпадает с конкретным профилем электрических потерь Pref.
[50] Как проиллюстрировано в блоке 104, скорость обратного вращения двигателя M можно регулировать для поддержания совпадения с конкретным профилем электрических потерь Pref. Под регулированием скорости обратного вращения двигателя M следует понимать, что устройство 10 регулирования скорости привода может управлять двигателем M, для достижения совпадения между значением механической мощности Pmech и конкретным профилем электрических потерь Pref.
[51] Способ 100, проиллюстрированный на Фиг. 3, позволяет двигателю вращаться в обратном направлении в состоянии, когда механическая мощность, генерируемая двигателем M, сопоставима с электрической мощностью, требуемой для устройства 10 регулирования скорости привода, для его запуска и управления двигателем M. При этом может генерироваться небольшая избыточная мощность или не генерироваться вовсе, что снижает или даже устраняет необходимость в рассеивании мощности.
[52] В некоторых примерах, крутящий момент нагрузки, подаваемый на двигатель под действием нагрузки, может оставаться постоянным во времени. В таких случаях, значение механической мощности Pmech и возникающие электрические потери также могут оставаться постоянными. Эталонная скорость ωref и эталонный магнитный поток ϕref в таких примерах могут оставаться постоянными.
[53] В некоторых примерах, крутящий момент нагрузки может изменяться со временем. В таких случаях, значение механической мощности Pmech и возникающие электрические потери также могут изменяться со временем. В результате, значение механической мощности Pmech может совпадать с конкретным профилем электрических потерь Pref не непрерывно.
[54] Фиг. 4 иллюстрирует способ 200, который можно осуществлять в блоке 104, как обсуждалось на Фиг. 3. Способ 200 состоит в корректировке эталонного магнитного потока ϕref. В настоящем раскрытии, один и тот же блок может быть представлен на различных Фигурах, и в данном случае такой блок пронумерован одинаково на различных Фигурах.
[55] Способ 200 содержит в блоке 201 корректировку значения механической мощности Pmech для учета изменения расчетного крутящего момента нагрузки Test. Как проиллюстрировано в блоке 202, конкретный профиль электрических потерь Pref может быть определен заново. Определенный заново конкретный профиль электрических потерь Pref может совпадать со скорректированным значением механической мощности Pmech. Как проиллюстрировано в блоке 203, скорректированный эталонный магнитный поток ϕref можно определить из выявленного заново конкретного профиля электрических потерь Pref. Корректировка эталонного магнитного потока ϕref может обеспечить поддержание совпадения между значением механической мощности Pmech и конкретным профилем электрических потерь Pref, даже при изменении крутящего момента нагрузки, подаваемого на двигатель M при обратном вращении. Эталонная скорость ωref в таких примерах, может оставаться постоянной.
[56] Фиг. 5 иллюстрирует способ 300, который можно осуществлять в блоке 104, как обсуждалось на Фиг. 3. Способ 300 состоит в корректировке эталонной скорости ωref.
[57] Способ 300 также содержит блок 201 корректировки значения механической мощности Pmech. Способ 300 дополнительно содержит в блоке 301 извлечение из конкретного профиля электрических потерь Pref значения электрических потерь, возникающих при расчетном крутящем моменте нагрузки Test. Значение электрических потерь соответствует электрическим потерям, возникающим при расчетном крутящем моменте нагрузки Test, при следовании конкретному профилю электрических потерь Pref. В блоке 302 можно определить скорость обратного вращения, при которой реализуется значение электрических потерь. Выявленная скорость обратного вращения может указывать на новую эталонную скорость ωref, при которой скорректированная механическая мощность Pmech может совпадать с конкретным профилем электрических потерь Pref. Как проиллюстрировано в блоке 303, эталонная скорость ωref может быть скорректирована, исходя из выявленной скорости согласно блоку 302. Одиночный конкретный профиль электрических потерь Pref можно использовать для регулирования скорости обратного вращения двигателя M. Корректировка эталонной скорости ωref может позволить поддерживать совпадение между значением механической мощности Pmech и конкретным профилем электрических потерь Pref, даже при изменении крутящего момента нагрузки, подаваемого на двигатель M при обратном вращении. Эталонный магнитный поток ϕref в таких примерах может оставаться постоянным.
[58] В некоторых случаях может быть скорректирован, как эталонный магнитный поток ϕref, так и эталонная скорость ωref. Эталонная скорость ωref может быть скорректирована, когда магнитный поток имеет значение ниже порогового. Эталонный магнитный поток ϕref может быть скорректирован для сдерживания или подавления колебаний скорости при низких скоростях обратного вращения. Сочетание корректировки, как эталонного магнитного потока ϕref, так и эталонной скорости ωref может повысить надежность и быстродействие регулирования скорости обратного вращения.
[59] Фиг. 6 иллюстрирует способ 400, содержащий блоки 101-104, как обсуждалось на Фиг. 3, на которой профиль максимальных электрических потерь Pmax определяют в блоке 401. Электрические потери могут сдерживаться током, который можно подавать на электродвигатель M. Таким образом, под профилем максимальных электрических потерь Pmax следует понимать максимально достижимые электрические потери при любой данной скорости и крутящем моменте, и для любого уровня магнитного потока.
[60] В блоке 402, значение электрических потерь, сопоставимое со значением механической мощности Pmech за счет применения способа 100, можно сравнить с профилем максимальных электрических потерь Pmax. Значение электрических потерь может быть ниже максимальных электрических потерь, что указывает на то, что конкретный профиль электрических потерь Pref оказывается совпадающим со значением механической мощности Pmech. Значение электрических потерь может представлять собой максимальные электрические потери, что указывает на то, что со значением механической мощности Pmech никакой профиль электрических потерь Pelec совпадать не может. Значение электрических потерь может быть снижено, например, путем снижения эталонной скорости ωref. Таким образом, значение механической мощности Pmech также может быть снижено в соответствии со способом 100 и совпадать с конкретным профилем электрических потерь Pref.
[61] В некоторых примерах, блок 104 регулирования скорости обратного вращения двигателя может выполняться вплоть до достижения заданного порогового значения.
[62] Заданное пороговое значение может представлять собой минимальный крутящий момент нагрузки Tmin. При минимальном крутящем моменте нагрузки Tmin, скорость обратного вращения, требуемая для поддержания совпадения с конкретным профилем электрических потерь, Pref, может превышать номинальную скорость системы. Иными словами, генерирование достаточной механической мощности для поддержания работы устройства регулирования скорости привода может потребовать избыточной скорости обратного вращения. В таком случае, может быть предпочтительным снять управление с устройства 10 регулирования скорости привода и позволить устройству 10 регулирования скорости привода отключиться.
[63] Заданное пороговое значение может представлять собой минимальное значение механической мощности Pmin. При минимальном значении механической мощности Pmin, на двигатель M может подаваться незначительная нагрузка. Скорость обратного вращения может оставаться при значении скорости ниже номинальной скорости двигателя M, без регулирования от устройства 10 регулирования скорости привода.
[64] Заданное пороговое значение может представлять собой максимальную скорость обратного вращения ωmax. Достижение максимальной скорости обратного вращения может указывать на то, что на двигатель подается низкий крутящий момент нагрузки. При максимальной скорости обратного вращения ωmax, скорость обратного вращения, требуемая для поддержания совпадения с конкретным профилем электрических потерь, может превышать номинальную скорость системы. В таком случае, может быть предпочтительным снять управление с устройства 10 регулирования скорости привода и позволить устройству 10 регулирования скорости привода отключиться.
[65] В некоторых примерах, способы, описанные в настоящей работе, могут содержать выбор того, корректирует ли регулирование скорости обратного вращения двигателя эталонную скорость ωref согласно способу 300, или эталонный магнитный поток ϕref согласно способу 200. В некоторых случаях, этот выбор может сделать оператор. Выбор может зависеть от применения. Выбор может повысить гибкость способов, описанных в настоящей работе.
[66] В некоторых примерах, способы, описанные в настоящей работе, могут содержать выявление обратное вращение двигателя M. Выявление возникновения обратного вращения может привести в действие регулирование скорости обратного вращения двигателя M. Выявление обратного вращения может быть достигнуто с помощью измеренной скорости из измерений скорости или тока на двигателе M.
[67] Фиг. 7 иллюстрирует систему управления, выполненную с возможностью осуществления способов, описанных в настоящей работе.
[68] Как проиллюстрировано, значение механической мощности Pmech можно определить в блоке 101 из скорости обратного вращения ω и расчетного крутящего момента нагрузки Test. Расчетный крутящий момент нагрузки Test можно определить из измерений на двигателе. Расчетный крутящий момент нагрузки Test можно определить путем проведения измерений тока и вычисления расчетного крутящего момента нагрузки Test. Расчетный крутящий момент нагрузки Test можно определить из проведенных измерений крутящего момента на двигателе. Измерения могут быть проведены с помощью датчиков на двигателе.
[69] В некоторых примерах, скорость обратного вращения ω может представлять собой заданную скорость обратного вращения ωназначенная. Заданная скорость обратного вращения ωназначенная может быть назначена в зависимости от желаемой скорости обратного вращения двигателя M. Заданная скорость обратного вращения ωназначенная может быть выбрана в зависимости от применения. Заданная скорость обратного вращения ωназначенная может быть выбрана оператором. Заданная скорость обратного вращения ωназначенная может быть выбрана, например, между средней, быстрой и медленной скоростью обратного вращения. В таких случаях, заданная скорость обратного вращения ωназначенная может быть сопоставима с эталонной скоростью ωref. Двигатель может работать при заданной скорости обратного вращения ωназначенной. Управление двигателем в блоке 104 может быть достигнуто путем применения способа 200.
[70] В некоторых примерах, скорость обратного вращения ω может представлять собой расчетную скорость обратного вращения. Расчетная скорость обратного вращения может быть установлена путем измерений, проведенных на двигателе M. Измерения могут быть проведены датчиками на двигателе.
[71] Как проиллюстрировано, определение конкретного профиля электрических потерь Pref в блоке 102 может содержать идентификацию конкретного профиля электрические потери Pref из нескольких профилей электрических потерь Pelec. Профили электрических потерь Pelec могут соответствовать профилям электрических потерь, возникающих при 10-150% номинального магнитного потока. Профили электрических потерь Pelec могут соответствовать профилям электрических потерь, возникающих при 20-120% номинального магнитного потока. Номинальный магнитный поток может соответствовать проектному магнитному потоку электродвигателя M. Электрические потери, возникающие при 10-150% номинального магнитного потока, могут соответствовать вероятным значениям механической мощности. Электрические потери, возникающие при 10-150% номинального магнитного потока, также могут соответствовать достижимым уровням магнитного потока двигателя, для поддержки электродвигателя M в сохранности.
[72] В некоторых примерах, определение конкретного профиля электрических потерь Pref может содержать расчет конкретного профиля электрических потерь Pref из выявленного значения механической мощности Pmech, данных двигателя и расчетного крутящего момента нагрузки Test.
[73] В дополнение, блок 500 иллюстрирует расчет с помощью устройства 10 регулирования скорости привода напряжений, прикладываемых к двигателю M. Напряжения можно рассчитать с использованием законов управления векторами. Эталонную скорость ωref и эталонный магнитный поток ϕref можно преобразовать в напряжение, генерирующее магнитный поток, и напряжение, генерирующее крутящий момент. Напряжение, генерирующее магнитный поток, и напряжение, генерирующее крутящий момент, можно преобразовать в трехфазные напряжения, подаваемые на каждую обмотку двигателя. Измерения тока на двигателе M можно использовать в расчетах напряжения для повышения точности расчетов напряжения.
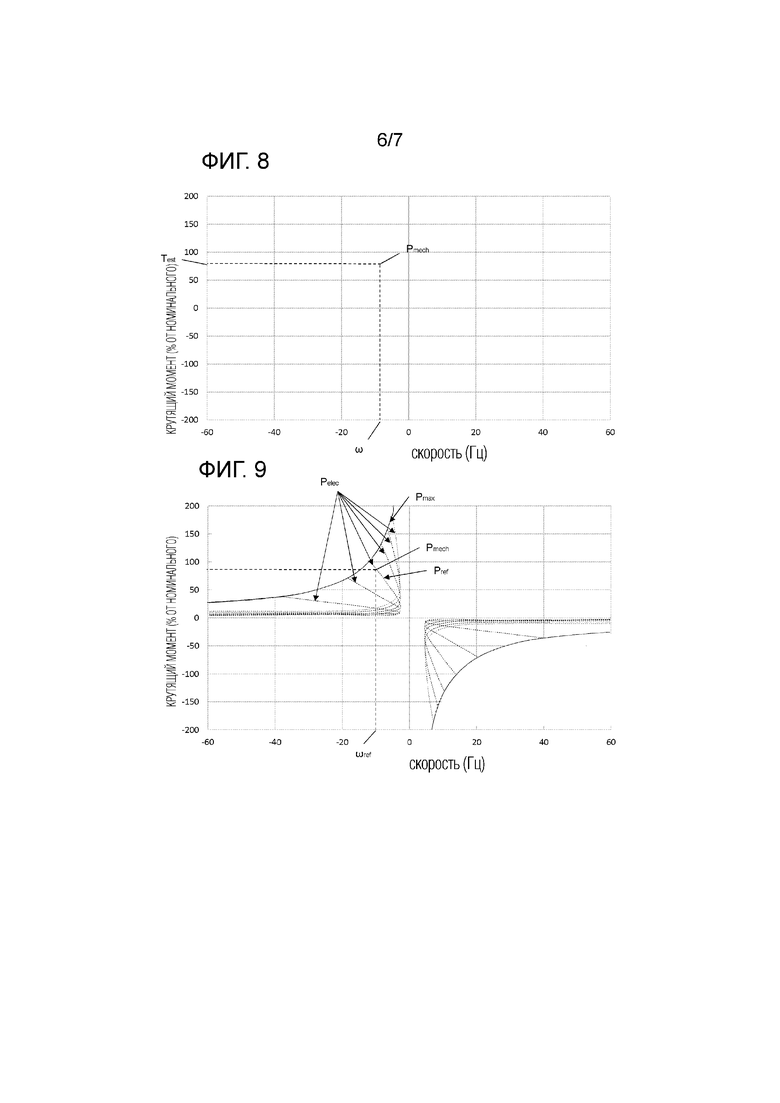
[74] Фиг. 8 иллюстрирует пример расчета значения механической мощности Pmech. Скорость обратного вращения ω может быть рассчитана или оценена в данном примере как -10 Гц, или приблизительно 62 рад/с. Расчетный крутящий момент нагрузки Test может быть оценен в данном примере как 80% от номинального крутящего момента. Если номинальный крутящий момент двигателя M в данном примере составляет 135 Нˑм, то расчетная нагрузка Test может составлять 108 Нˑм. Таким образом, значение механической мощности Pmech можно оценить как 6,7 кВт.
[75] Фиг. 9 иллюстрирует пример идентификации конкретного профиля электрических потерь Pref и использования профиля максимальных электрических потерь Pmax. Как проиллюстрировано, было определено шесть профилей электрических потерь Pelec, в зависимости от скорости и крутящего момента, для уровней магнитного потока в диапазоне 20-120% номинального магнитного потока. Профиль максимальных электрических потерь Pmax иллюстрирует максимально достижимые электрические потери. В данном примере, максимальные электрические потери, возникающие при скорости ω обратного вращения -10 Гц, составляют 9,3 кВт. В этом случае, значение механической мощности Pmech 6,7кВт будет ниже максимальных электрических потерь. Конкретный профиль электрических потерь Pref, совпадающий со значением механической мощности Pmech при скорости обратного вращения -10 Гц, в этом случае, представляет собой профиль электрических потерь Pelec при 80% номинального магнитного потока. На двигатель M может подаваться эталонный магнитный поток, составляющий 80% от номинального магнитного потока. В дополнение, в данном примере эталонная скорость ωref может быть задана как -10 Гц, сопоставимая со скоростьюω обратного вращения.
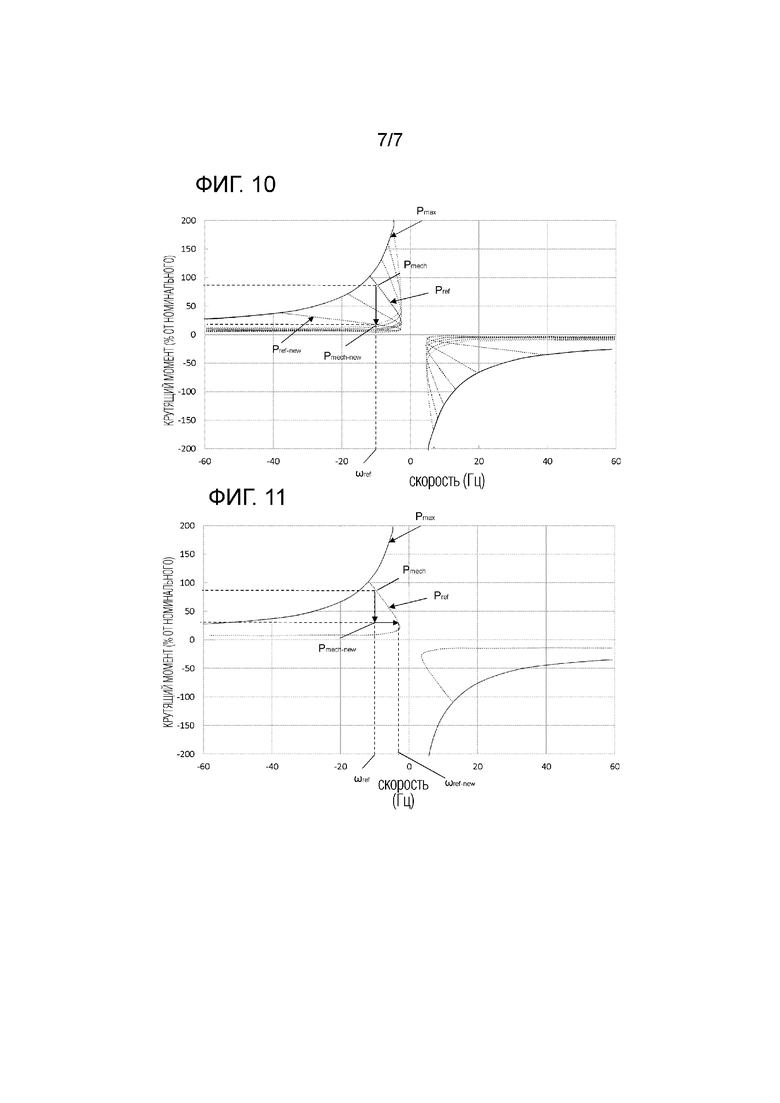
[76] Фиг. 10 и 11 иллюстрируют примеры, в которых расчетный крутящий момент нагрузки Test снижен от 80% до 25% от номинального крутящего момента. Изменение расчетного крутящего момента нагрузки Test приводит к скорректированному значению механической мощности Pmech-new. Скорректированное значение механической мощности Pmech-new можно рассчитать из эталонной скорости ωref и сниженного расчетного крутящего момента нагрузки Test. Согласно этому примеру можно обнаружить, что новое значение механической мощности Pmech-new составляет 2,1 кВт. Однако, электрические потери, возникающие при эталонном значении скорости ωref, остаются на уровне 9,3 кВт. Двигатель M может генерировать избыточную мощность 7,2 кВт.
[77] Фиг. 10 иллюстрирует пример, в котором эталонный магнитный поток ϕref скорректирован. Устройство 10 регулирования скорости привода может выбрать новую конкретную кривую электрических потерь Pref. В данном примере, новый конкретный профиль электрических потерь Pref, совпадающий с новым значением механической мощности Pmech-new, представляет собой профиль электрических потерь Pelec при 20% от номинального магнитного потока. Эталонная скорость ωref может оставаться на уровне -10 Гц, сопоставимой с предыдущей скоростью ω обратного вращения. На двигатель M можно подавать скорректированный эталонный магнитный поток, составляющий 20% от номинального магнитного потока.
[78] Фиг. 11 иллюстрирует пример, в котором эталонная скорость ωref скорректирована. Устройство 10 регулирования скорости привода может определить новую эталонную скорость ωref-new. Согласно конкретному профилю электрических потерь Pref при 80% от номинального магнитного потока, электрические потери 2,1 кВт могут возникнуть при новой эталонной скорости ωref-new -5 Гц. Эталонный магнитный поток может оставаться на уровне 20% от номинального магнитного потока. На двигатель M можно подавать скорректированную эталонную скорость -5Гц.
Изобретение относится к электротехнике. Технический результат заключается в поддержании двигателя с обратным вращением в состоянии, когда электроэнергия, генерируемая двигателем, сопоставима с электроэнергией, используемой приводом с переменным вращением, для снижения или даже устранения необходимости в рассеивании энергии. Технический результат достигается за счет того, что способ управления, воплощенный в устройстве регулирования скорости привода, для управления электродвигателем при обратном вращении содержит: определение с помощью устройства регулирования скорости привода значения механической мощности, возникающей при скорости обратного вращения, и расчетного крутящего момента нагрузки; определение с помощью устройства регулирования скорости привода конкретного профиля электрических потерь, возникающих на уровне магнитного потока двигателя, в котором конкретный профиль электрических потерь совпадает со значением механической мощности; определение с помощью устройства регулирования скорости привода эталонного магнитного потока и эталонной скорости, применяемой к двигателю, для достижения совпадения с конкретным профилем электрических потерь; и регулирование с помощью устройства регулирования скорости привода скорости обратного вращения двигателя для поддержания совпадения с конкретным профилем электрических потерь. 3 н. и 12 з.п. ф-лы, 11 ил.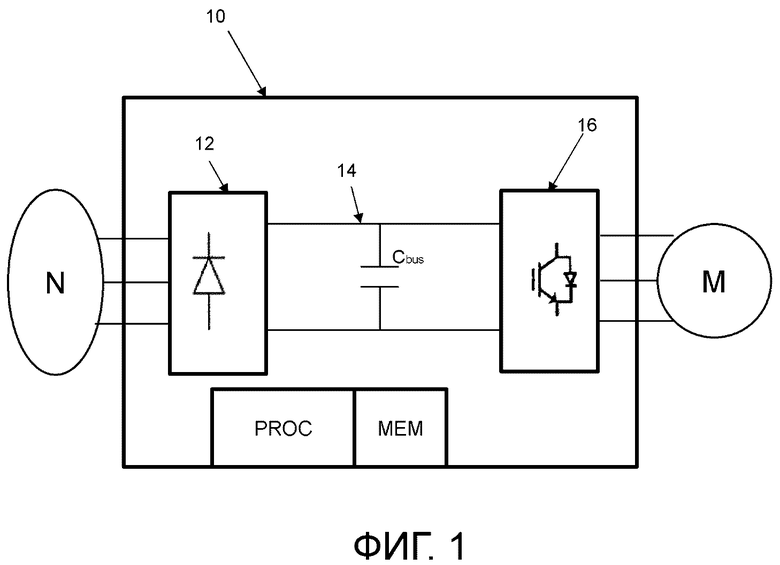
1. Способ управления, воплощенный в устройстве (10) регулирования скорости привода, для управления электродвигателем (M) при обратном вращении, причем способ содержит:
- определение с помощью устройства регулирования скорости привода значения механической мощности (Pmech), возникающей при скорости (ω) обратного вращения, и расчетного крутящего момента нагрузки (Test);
- определение с помощью устройства регулирования скорости привода конкретного профиля электрических потерь (Pref), возникающего на уровне магнитного потока двигателя, в котором конкретный профиль электрических потерь (Pref) совпадает со значением механической мощности (Pmech);
- определение с помощью устройства регулирования скорости привода эталонного магнитного потока (ϕref) и эталонной скорости (ωref), применяемых к двигателю (M), для достижения совпадения с конкретным профилем электрических потерь (Pref); и
- регулирование с помощью устройства регулирования скорости привода скорости обратного вращения двигателя (M) для поддержания совпадения с конкретным профилем электрических потерь (Pref).
2. Способ по п. 1, в котором регулирование скорости обратного вращения двигателя (M) содержит повторное определение конкретного профиля электрических потерь (Pref) для корректировки эталонного магнитного потока (ϕref).
3. Способ по п. 1 или 2, в котором регулирование скорости обратного вращения двигателя содержит извлечение из конкретного профиля электрических потерь (Pref) значения электрических потерь, возникающих при расчетном крутящем моменте нагрузки (Test), и корректировку эталонной скорости (ωref) до скорости обратного вращения, соответствующей значению электрических потерь.
4. Способ по любому из предыдущих пунктов, содержащий определение профиля максимальных электрических потерь (Pmax) и проверку того, чтобы значение электрических потерь, возникающих при скорости обратного вращения (ω), и расчетного крутящего момента нагрузки (Test) находились ниже профиля максимальных электрических потерь (Pmax).
5. Способ по любому из предыдущих пунктов, в котором регулирование скорости обратного вращения двигателя (M) осуществляют до достижения заданного порогового значения.
6. Способ по п. 5, в котором заданное пороговое значение представляет собой по меньшей мере одно значение из группы, содержащей: минимальный крутящий момент нагрузки (Tmin), минимальное значение механической мощности (Pmin), максимальную скорость обратного вращения (ωmax).
7. Способ по любому из предыдущих пунктов, в котором скорость обратного вращения (ω) представляет собой заданную скорость обратного вращения (ωназначенная).
8. Способ по п. 7, в котором заданная скорость обратного вращения (ωназначенная) выбрана из группы, содержащей медленную, среднюю и быструю скорость обратного вращения.
9. Способ по любому из предыдущих пунктов, в котором определение конкретного профиля электрических потерь (Pref) содержит выбор конкретного профиля электрических потерь (Pref) из нескольких профилей электрических потерь (Pelec), возникающих при множестве уровней магнитного потока двигателя.
10. Способ по п. 9, в котором множество уровней магнитного потока находятся в диапазоне от 10% номинального магнитного потока до 150% номинального магнитного потока.
11. Способ по любому из предыдущих пунктов, дополнительно содержащий выбор того, включает ли регулирование скорости обратного вращения двигателя изменение эталонного магнитного потока (ϕref) и/или эталонной скорости (ωref).
12. Способ по любому из предыдущих пунктов, дополнительно содержащий выявление с помощью устройства регулирования скорости привода обратного вращения двигателя (M).
13. Способ по любому из предыдущих пунктов, в котором способ содержит применение способа после прекращения подачи электроэнергии.
14. Устройство (10) регулирования скорости привода для электродвигателя, содержащее процессор (PROC) и память (MEM), причем процессор выполнен с возможностью функционирования в соответствии со способом по любому из вышеупомянутых пунктов.
15. Компьютерно-читаемый носитель данных, содержащий команды, которые, при выполнении на процессоре (PROC), предписывают процессору осуществлять способ по любому из вышеупомянутых пунктов.
| US 7534096 B2, 19.05.2009 | |||
| US 8823297 B2, 02.09.2014 | |||
| WO 2019183407 A1, 26.09.2019 | |||
| US 7558699 B2, 07.07.2009 | |||
| US 9093938 B2, 28.07.2015 | |||
| Способ подхвата преобразователя частоты | 2017 |
|
RU2656846C1 |

