Изобретение относится к области железнодорожного транспорта, в частности, к путевым тормозным устройствам железнодорожного транспорта, и предназначено для удаленного интерактивного контроля и управления процессом заграждения самопроизвольно движущихся вагонов.
При работе на путях сортировочных горок требуется принудительное задержание вагонов от их самопроизвольного выхода из зоны заграждения в сортировочном парке. При этом маневровый локомотив должен иметь возможность перемещения в обоих направлениях (как в сторону горба горки, так и в противоположную сторону) на путях, оборудованных автоматизированными системами закрепления железнодорожного подвижного состава, причем без ограничения скорости движения.
Известен блок удержания состава на станционном пути, включающий смонтированный внутри колеи модуль закрепления состава, содержащий электропривод и раму с подвижно закрепленной на ней кареткой, связанной с электроприводом посредством тяги, при этом в каретке размещены пружинные блоки, соединенные с рычагами, связанными с закрепляющими шинами, с образованием двух независимых параллелограммных систем, причем закрепляющие шины оборудованы зубьями и упорами-ловушками, и соединены с рамой кулисами и компенсаторами, смонтированный внутри колеи модуль демпфирующий, собранный из зажимающих секций и содержащий электропривод, соединенный через зубчатую муфту ограничения момента с винтовым домкратом, раму с подвижно закрепленной на ней кареткой, связанной с винтовым домкратом и с рычагами, которые соединены компенсаторами с уравнительными рычагами, соединенными с внутренними и наружными толкателями, качающимися на своих осях относительно рамы, причем уравнительные рычаги и наружные толкатели связаны между собой при помощи тяги, а на внутренних и на наружных толкателях закреплены соответственно внутренняя и наружная шины, каждая из которых состоит из лыжи с зубчатыми механизмами, основания с пазами для размещения зубчатых механизмов, и плунжера, кроме того, электропривод модуля закрепления состава соединен через зубчатую муфту ограничения момента с винтовым домкратом (RU 2578642, B61K 7/16, 27.03. 2016).
Недостаток известного устройства удержания состава на станционном пути заключается в том, что при использовании нескольких заграждающих устройств не предусмотрены средства для их управления с одного рабочего места оператора.
В качестве прототипа было принято устройство, заграждающее балочное, содержащее установленные внутри колеи рельсового пути вдоль одного рельса тормозную балку с шиной, а вдоль другого рельса - контррельс, при этом тормозная балка с помощью скользящих фигурных гаек и болтов закреплена на основаниях, неподвижно закрепленных на шейке рельса и шпалах, и снабжена пружинами, упирающимися в подвижную рейку, соединенную с рычажным механизмом, связанным через рабочую тягу с электроприводом, пружины выполнены с регулируемыми устройствами, подвижная рейка снабжена клиньями и возвратным механизмом для принудительного перемещения балки поперек пути, регулируемые устройства пружин снабжены вращающимися роликами, упирающимися в подвижную рейку с клиньями при переводе балки в рабочее или нерабочее положение, а электропривод снабжен контрольной тягой и рычагами контроля положения тормозной балки (RU 2436694, B61K 7/02, 20.12. 2011).
Недостатком известного устройства является местное управление устройством, в результате чего повышаются эксплуатационные затраты на его обслуживание. Наиболее экономически целесообразным является централизованный контроль и управления устройствами подобного рода, в результате чего возможно включение их в единую систему управления и контроля железнодорожной сортировочной станции.
Другим недостатком этого устройства является отсутствие увязки управления данного устройства с электрической централизацией выходной горловины. Это может привести к переводу устройства заграждения в заторможенное положение при заданном маршруте на путь, что может привести к сходу подвижного состава.
Предлагаемая система контроля и управления заграждающими устройствами направлена на исключение вышеперечисленных недостатков.
Технический результат изобретения заключается в упрощении контроля и управления устройствами заграждения с одного рабочего места, повышении безопасности сортировочного процесса и оптимизации количества заграждающих устройств.
Технический результат достигается тем, что система контроля и управления заграждающими устройствами содержит соединенные с сетевым коммутатором вычислительный сервер, персональный компьютер автоматизированного рабочего места, средства горочной централизации, преобразователь аналогового сигнала и преобразователь цифрового сигнала, выход которого через модуль блокировки управления, управляющий вход которого соединен со средствами электрической централизации, подключен к блоку реле управления, в котором контакты каждого реле управления включены в цепи управления соответствующего устройства заграждения, которые установлены на контролируемом участке железнодорожного пути, перед каждым устройством заграждения установлено устройство фиксации прохождения осей колесных пар, а после последнего по ходу движения устройства заграждения дополнительно установлены на расстоянии друг от друга два устройства фиксации прохождения осей колесных пар, информационные выходы устройств фиксации прохождения осей колесных пар подключены ко входу преобразователя аналогового сигнала, к которому через соответствующие контакты блока реле контроля подключены формирователи сигнала рабочего положения устройств заграждения, соединенные с входами соответствующих реле, входящих в состав блока реле контроля.
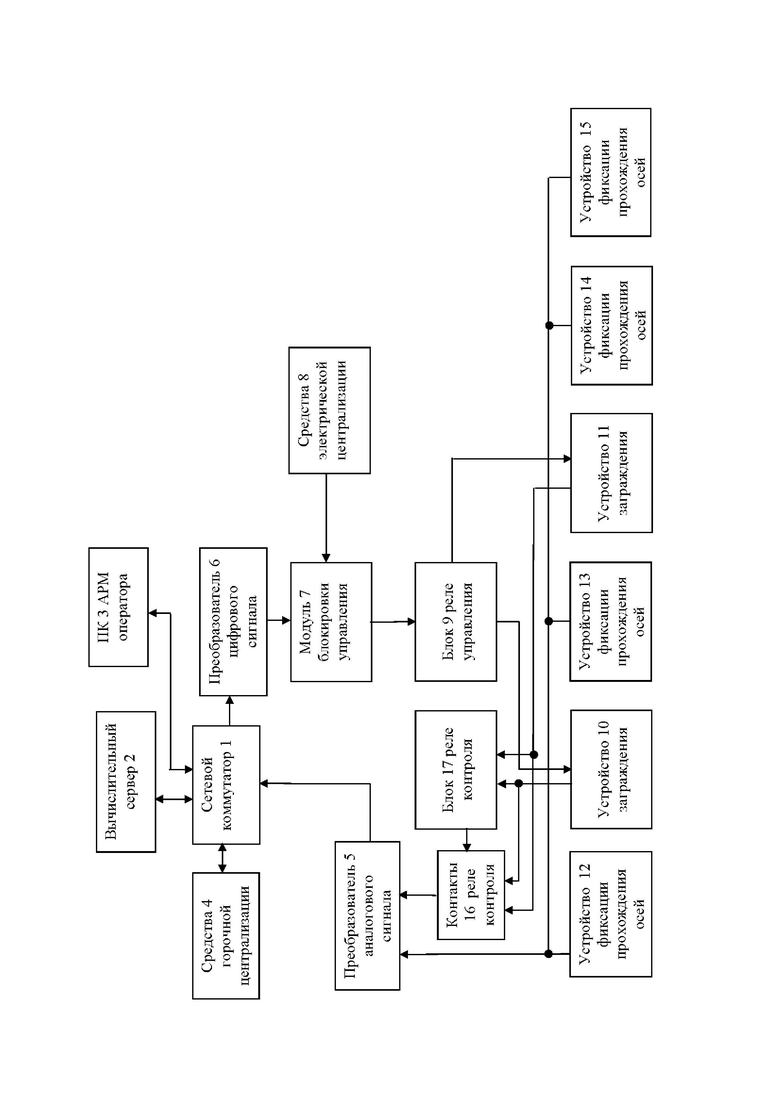
На чертеже приведена функциональная схема системы контроля и управления заграждающими устройствами.
Система контроля и управления заграждающими устройствами содержит соединенные с сетевым коммутатором 1 вычислительный сервер 2, персональный компьютер 3 (ПК) автоматизированного рабочего места (АРМ), средства 4 горочной централизации, преобразователь 5 аналогового сигнала и преобразователь 6 цифрового сигнала, выход которого через модуль 7 блокировки управления, управляющий вход которого соединен со средствами 8 электрической централизации, подключен к блоку 9 реле управления, в котором контакты каждого реле управления включены в цепи управления соответствующего устройства 10 (11) заграждения, которые установлены на контролируемом участке железнодорожного пути, перед каждым устройством 10 (11) заграждения установлено устройство 12 (13) фиксации прохождения осей колесных пар, а после последнего по ходу движения устройства 11 заграждения дополнительно установлены на расстоянии друг от друга два устройства 14 и 15 фиксации прохождения осей колесных пар, информационные выходы устройств 12, 13, 14 и 15 фиксации прохождения осей колесных пар подключены ко входу преобразователя 5 аналогового сигнала, к которому через соответствующие контакты 16 блока 17 реле контроля подключены формирователи сигнала рабочего положения устройств 10 (11) заграждения, соединенные с входами соответствующих реле, входящих в состав блока 17 реле контроля.
Систему контроля и управления заграждающими устройствами используют следующим образом.
Система контроля и управления заграждающими устройствами содержит в своем составе как минимум два устройства заграждения 10 и 11, одно из которых (10) является входным и находится ближе к горбу горки. При размещении устройств заграждения в зависимости от максимальной длины отцепа можно сократить их количество. Например, для остановки отцепа длиной 10 вагонов и массой тысяча тонн требуется около четырех заграждающих устройств при их последовательном расположении. Если использовать ниже приведенный расчет расстояния, то количество заграждающих устройств можно уменьшить до двух штук.
Расчет производят следующим образом.
Для расчета используют следующие данные:
· Продольный профиль сортировочного пути, на котором будет производиться установка устройства заграждения, с расставленными отметками предельного столбика последней стрелки и маневрового светофора в выходной горловине
· Направление ветра, средняя скорость ветра, средняя температура.
· Максимальное количество вагонов в отцепе, принятое для данной сортировочной горки.
· Максимальный вес состава, накапливаемый на данном пути.
При отсутствии информации о максимальном весе состава (Qmax) для расчета используется максимальная вместимость пути (Nmax). Вместимость пути (Nmax) рассчитывается следующим образом: расчётная полезная длина (Lпд) пути делится на длину условного вагона (Lваг), округление всегда должно быть в меньшую сторону до целого числа. Расчётная полезная длина пути считается как длина пути в пределах от последнего предельного столбика в стрелочной зоне до предельной точки остановки вагонов в конце пути сортировочного парка. Предельная точка остановки отцепа – точка в конце пути сортировочного парка за которую не должны выезжать вагоны, находящаяся на расстоянии 30 метров в сторону горба горки от маневрового светофора или изолирующего стыка в выходной горловине. Максимальный вес состава рассчитывается путем умножения максимальной вместимости пути на условный максимальный вес вагона (100 т).
Потребная расчетная мощность ht тормозной позиции устройства заграждения (УЗС) должна обеспечивать при благоприятных условиях скатывания отцепов остановку четырехосного вагона в конце путей сортировочного парка.
Величина ht определяется выражением:
ht = ку (V2вх + 2g’lуч (i - wox + wср) *10-3) /2g’, (1)
где: ку – коэффициент увеличения потребной расчетной мощности тормозной позиции, принимается равным 1,2;
Vвх - скорость входа отцепа на тормозную позицию, м/с;
g’ – ускорение силы тяжести с учетом инерции вращающихся частей вагонов, принимается 9,6 м/с2;
lуч, i - соответственно длина (м) и уклон (‰) расчетного элемента пути с устройством заграждения;
wср - сопротивление движению от воздушной среды и ветра, кгс/тс;
wох – основное удельное сопротивление движению вагона, кгс/тс.
Количество устройств заграждения, обеспечивающее потребную расчетную мощность ht, определяется по формуле:
Nтузс = ht / hбзс, (2)
где hбзс – расчетная погашаемая энергетическая высота.
Расчет количества устройств заграждения для удержания состава весом Qmax на пути со средним уклоном (от предельного столбика до места установки УЗС) i, взятым по модулю, производится по формуле:
Nyузс = Ку * Qmax * |i|/Fузс *10-3, (3)
где: Fузс - удерживающее усилие УЗС для одной тележки вагона;
Ку - коэффициент увеличения потребного расчетного удерживающего усилия УЗС, принимается равным 1,2.
Средний уклон рассчитывается по формуле:
 , (4)
, (4)
где  – уклон и длина k-го участка;
– уклон и длина k-го участка;
n – количество участков в пределах расчетной полезной длины пути.
Из полученных в результате расчета значений Nтузс и Nуузс принимается большее, округление производится в большую сторону до целого числа, минимальное количество УЗС составляет 2 штуки. Если количество устройств заграждения больше 2, то дополнительные устройства заграждения ставятся к первому по схеме.
Для расчета расстояния между УЗС первоначально определяется кинетическая отцепа максимальной длины в метрах энергетической высоты по формуле:
 , (5)
, (5)
где m – масса отцепа максимальной длины с учетом веса условного вагона в 100 т;
V – скорость входа отцепа в УЗС.
Количество тормозимых вагонных тележек в тормозной позиции УЗС, необходимое для погашения энергетической высоты отцепа максимальной длины и веса определяется по формуле
nt = ht / hузс, (6)
где hбзс – расчетная погашаемая одним УЗС на одну тележку вагона.
При дробном значении nt производится округление до целого числа. Количество тормозимых тележек вторым по ходу роспуска УЗС с учетом количества тормозимых вагонов в одном УЗС Nв = 1,5 составляет
Nt2 = Nв*2 = 1,5*2 = 3
Для погашения энергетической высоты отцепа максимальной длины и веса определяется необходимая длина тормозной позиции с установленными двумя УЗС с учетом Nt2 по формуле:
Lтп = (Nt – Nt2) * (Lваг/2) (7)
Lтп - это расстояние он начала первого устройства закрепления до конца последнего устройства закрепления.
Устройство 12 фиксации прохождения осей предназначено для контроля въезда подвижного состава в зону заграждения. Оно устанавливается на расстоянии не более одного метра до первого устройства 10 заграждения в сторону горба горки.
Устройство 13 фиксации прохождения осей предназначено для контроля въезда подвижного состава в последнее устройство 11 заграждения. Оно устанавливается на расстоянии не более одного метра до последнего устройства 11 заграждения в сторону горба горки.
Устройство 14 фиксации прохождения осей предназначено для контроля выезда подвижного состава из последнего устройства 11 заграждения. Оно устанавливается на расстоянии не более одного метра после последнего устройства 11 заграждения в сторону противоположной горбу горки.
Устройство 15 фиксации прохождения осей предназначено для контроля выезда подвижного состава за безопасную зону. Оно устанавливается на расстоянии не более трех метров после последнего устройства 14 фиксации прохождения осей в сторону противоположной горбу горки. При выезде более трех колесных пар через устройство 15 фиксации прохождения осей фиксируется нарушение безопасной зоны.
Информация с информационных выходов устройств 12, 13, 14 и 15 фиксации прохождения осей поступает на вход преобразователя 5 аналогового сигнала. Информация о состоянии устройств 10 (11) заграждения поступает на вход преобразователя 5 аналогового сигнала через контакты 16 реле, входящего в блок 17. Вход каждого реле, входящего в блок 17, подключен к формирователю сигнала рабочего положения соответствующего устройства 10 (11) заграждения. Наличие или отсутствие сигнала на входе (обмотке) реле указывает на положение, в котором находится устройство заграждения. При срабатывании реле, его контакты замыкаются и информационный сигнал поступает на вход преобразователя 5 аналогового сигнала. При обесточивании реле, его контакты разомкнуты и на вход преобразователя 5 сигнал не поступает.
Преобразователь 5 аналогового сигнала предназначен для преобразования входного сигнала от устройств фиксации прохождения осей и устройств заграждения в цифровой, который с выхода преобразователя по каналу Ethernet передается в сетевой коммутатор 1.
Управление устройствами заграждения 10 и 11 осуществляется с помощью блока 9 реле управления. Входом реле управления является обмотка электромагнитного реле, а его выходом являются контакты, которые включены в цепи управления устройства заграждения 10 (11), обеспечивающей перевод его в одно из положений. Обмотка каждого электромагнитного реле, входящего в блок 9, подключена к выходу преобразователя 6 цифрового сигнала через модуль 7 блокировки управления.
Входом преобразователя 6 цифрового сигнала является вход Ethernet, который подключается к сетевому коммутатору 1. Наличие выходного сигнала на выходе преобразователя 6 определяется значениями цифрового сигнала на его входе.
Включение каждого реле управления блока 9 осуществляется через модуль 7 блокировки управления, в зависимости от поступающей на его управляющий вход информации от средства 8 электрической централизации. Модуль блокировки управления проверяет следующие условия:
– замыкающее реле ближайшей стрелки под током;
– реле исключающего положения стрелки под током;
– вспомогательное реле «ВК» под током.
Модуль 7 блокировки управления разрешает управление устройством заграждения при условии выполнения хотя бы одного из условий. Модуль 7 блокировки управления исключает перевод устройств заграждения из одного положения в другое при заданном маршруте с пути или на путь со стороны выходной горловины. Если все условия не выполняются, то на обмотку реле управления блока 9 не будет поступать выходной сигнал преобразователя 6, вследствие чего реле будет обесточено и не будет осуществляться управление устройствами 10 (11) заграждения.
Преобразователь 5 аналогового сигнала и преобразователь 6 цифрового сигнала подключены к сетевому коммутатору 1, который соединен с вычислительным сервером 2, в котором производится расчет всех параметров работы системы. По информации, поступающей от преобразователя 5 аналогового сигнала, принимается решение о состоянии устройств 10 (11) заграждения. Вычислительный сервер 2 может формировать сигналы на перевод устройств 10 (11) заграждения в одно из положений посредством передачи сформированных сигналов управления через преобразователь 6 цифрового сигнала. К сетевому коммутатору 1 подключен персональный компьютер 3 автоматизированного рабочего места, с помощью которого эксплуатирующий персонал (оператор) может взаимодействовать с вычислительным сервером 2 для управления положением устройствами 10 (11) заграждения, при этом информация о действиях, осуществляемых на ПК 3 АРМ передается в вычислительный сервер 2.
Вычислительный сервер 2 передает информацию о состоянии устройств 10 (11) заграждения в средства 4 горочной централизации, которая необходима горочной централизации для выдачи разрешения на роспуск на данный путь или запрете роспуска на путь. Информация передается с помощью цифровых посылок по каналу Ethernet через сетевой коммутатор 1.
При свободности участка ответственный работник (оператор) на ПК 3 формирует команду затормозить, информация о которой передается в вычислительный сервер 2, в котором осуществляется проверка свободности участка, после чего эта команда на торможение поступает в преобразователь 6. При выполнении одного из условий перевода, проверяемых модулем 7 блокировки управления, реле управления блока 9 срабатывает и его контакты замыкают цепь управления устройства заграждения, переводя его в заторможенное состояние.
После того как устройство 10 (11) заграждения перешло в заторможенное состояние реле контроля блока 17 замыкает свои контакты и на вход преобразователя 5 аналогового сигнала поступает информация об этом, которая через сетевой коммутатор 1 поступает в вычислительный сервер 2, который получив информацию передает в преобразователь 6 команду на съем сигнала торможения, а в ПК 3 АРМ оператора и в средства 4 горочной централизации информацию о состоянии объектов. Ответственный работник (оператор) с помощью своего ПК 3 получает информацию о состоянии устройств заграждения и о выполнении команды.
Таким образом, предлагаемое изобретение обеспечивает упрощение контроля и управления устройствами заграждения с одного рабочего места, повышение безопасности сортировочного процесса и оптимизацию количества заграждающих устройств.
| название | год | авторы | номер документа |
|---|---|---|---|
| Комплексная система автоматизации управления сортировочным процессом (КСАУ СП) | 2020 |
|
RU2737815C1 |
| СИСТЕМА ГОРОЧНОЙ МИКРОПРОЦЕССОРНОЙ ЦЕНТРАЛИЗАЦИИ (ГМЦ) | 2017 |
|
RU2648488C1 |
| Устройство для контроля коэффициента трения колес вагонов перед роспуском состава на сортировочной горке | 2024 |
|
RU2822298C1 |
| УСТРОЙСТВО для КОРРЕКТИРОВКИ ПРОЦЕССА | 1968 |
|
SU218205A1 |
| Тренажерный комплекс оперативного персонала сортировочной горки | 2023 |
|
RU2810931C1 |
| ГОРОЧНОЕ ПРОГРАММНО-ЗАДАЮЩЕЕ УСТРОЙСТВО | 1998 |
|
RU2157773C2 |
| УСТРОЙСТВО КОНТРОЛЯ И УПРАВЛЕНИЯ ПРУЖИННО-ГИДРАВЛИЧЕСКОГО ВАГОННОГО ЗАМЕДЛИТЕЛЯ | 2013 |
|
RU2550005C1 |
| Способ управления технологическим процессом железнодорожной станции | 2020 |
|
RU2738779C1 |
| ИНТЕРАКТИВНАЯ АВТОМАТИЗИРОВАННАЯ СИСТЕМА ОБУЧЕНИЯ ПО ПРОФЕССИЯМ ОПЕРАТОРОВ СОРТИРОВОЧНОЙ ГОРКИ | 2021 |
|
RU2748768C1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО КОНТРОЛЯ СЛЕДОВАНИЯ ОТЦЕПОВ НА ПУТИ ПОДГОРОЧНОГО ПАРКА | 1965 |
|
SU172352A1 |
Изобретение относится к путевым тормозным устройствам железнодорожного транспорта. Система контроля и управления заграждающими устройствами содержит вычислительный сервер, персональный компьютер автоматизированного рабочего места, средства горочной централизации, преобразователь аналогового сигнала и преобразователь цифрового сигнала, соединенные с сетевым коммутатором, модуль блокировки управления, управляющий вход которого соединен со средствами электрической централизации, блок реле управления и блок реле контроля. Информационные выходы устройств фиксации прохождения осей колесных пар подключены ко входу преобразователя аналогового сигнала, к которому через соответствующие контакты блока реле контроля подключены формирователи сигнала рабочего положения устройств заграждения, соединенные с входами соответствующих реле, входящих в состав блока реле контроля. Технический результат изобретения заключается в упрощении контроля и управления устройствами заграждения с одного рабочего места, повышении безопасности сортировочного процесса и оптимизации количества заграждающих устройств. 1 ил.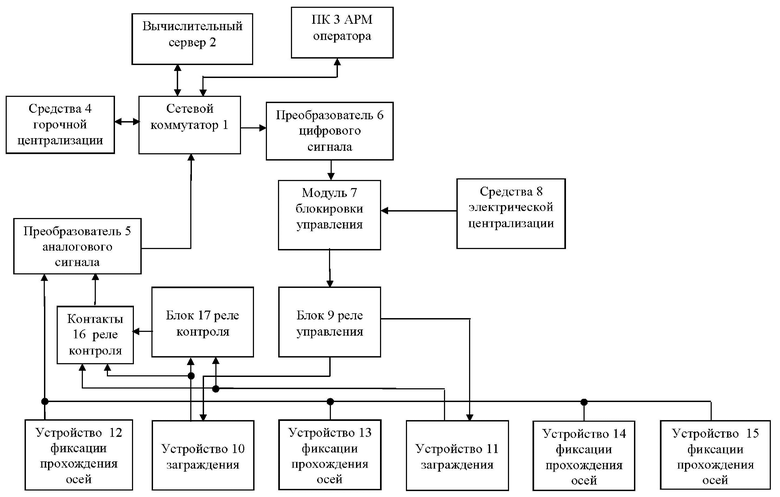
Система контроля и управления заграждающими устройствами, содержащая соединенные с сетевым коммутатором вычислительный сервер, персональный компьютер автоматизированного рабочего места, средства горочной централизации, преобразователь аналогового сигнала и преобразователь цифрового сигнала, выход которого через модуль блокировки управления, управляющий вход которого соединен со средствами электрической централизации, подключен к блоку реле управления, в котором контакты каждого реле управления включены в цепи управления соответствующего устройства заграждения, которые установлены на контролируемом участке железнодорожного пути, перед каждым устройством заграждения установлено устройство фиксации прохождения осей колесных пар, а после последнего по ходу движения устройства заграждения дополнительно установлены на расстоянии друг от друга два устройства фиксации прохождения осей колесных пар, информационные выходы устройств фиксации прохождения осей колесных пар подключены ко входу преобразователя аналогового сигнала, к которому через соответствующие контакты блока реле контроля подключены формирователи сигнала рабочего положения устройств заграждения, соединенные с входами соответствующих реле, входящих в состав блока реле контроля.
| Автоматизированная система и способ управления пневматическим приводом вагонного замедлителя | 2021 |
|
RU2779263C1 |
| УСТРОЙСТВО ЗАГРАЖДАЮЩЕЕ БАЛОЧНОЕ | 2010 |
|
RU2436694C1 |
| Способ управления технологическим процессом железнодорожной станции | 2020 |
|
RU2738779C1 |
| Автоматический синхронизатор | 1984 |
|
SU1201955A1 |

