Изобретение относится к беспилотным летательным аппаратам, в частности к беспилотным летательным аппаратам - амфибиям сельскохозяйственного назначения, и может быть использовано для обследования и изучения земель и водных объектов в сельском, лесном и водном хозяйстве.
Известен сельскохозяйственный беспилотный летательный аппарат - амфибия, включающий корпус, состоящий из носовой части фюзеляжа, средней части фюзеляжа и хвостовой части фюзеляжа. Носовая часть фюзеляжа содержит ультразвуковой датчик и подводную бинокулярную камеру, которые соединены с контроллером, расположенным по верху средней части фюзеляжа. По бокам средней части фюзеляжа выполнены по два прямоугольных паза с симметричным расположением относительно друг друга. Каждый прямоугольный паз содержит водонепроницаемый рулевой механизм, к которому закреплена полая штанга, а на ее свободном конце закреплен воздуховод, выполненный в виде кольца, в котором установлен водонепроницаемый двигатель с шестилопастным воздушным винтом. Хвостовая часть фюзеляжа оборудована по бокам рулем высоты, сверху и снизу - рулем направления, а сзади - водонепроницаемым двигателем с гребным винтом (см. патент CN №218316114 U, М. Кл. B60F 5/02, B64C 35/00, 17.01.2023).
Недостатками данного сельскохозяйственного беспилотного летательного аппарата - амфибии являются: низкая маневренность в воздушной среде и высокие затраты энергии при полете.
Задача, на решение которой направлено изобретение, - повышение маневренности в воздушной среде и снижение затрат энергии при полете сельскохозяйственного беспилотного летательного аппарата - амфибии.
Для решения этой задачи в сельскохозяйственном беспилотном летательном аппарате - амфибии, включающем корпус, состоящий из носовой части фюзеляжа, средней части фюзеляжа и хвостовой части фюзеляжа, где носовая часть фюзеляжа содержит ультразвуковой датчик и подводную бинокулярную камеру, которые соединены с контроллером, расположенным сверху средней части фюзеляжа, при этом по бокам средней части фюзеляжа выполнены по два прямоугольных паза с симметричным расположением относительно друг друга, причем каждый прямоугольный паз содержит водонепроницаемый рулевой механизм, к которому закреплена полая штанга, а на ее свободном конце закреплен воздуховод, выполненный в виде кольца, в котором установлен водонепроницаемый двигатель с шестилопастным воздушным винтом, хвостовая часть фюзеляжа оборудована по бокам рулем высоты, сверху и снизу - рулем направления, а сзади - водонепроницаемым двигателем с гребным винтом, согласно изобретению, на свободном конце полой штанги в ее полости размещена втулка с внутренней зубчатой поверхностью, выступающая за край полой штанги с возможностью закрепления на ней воздуховода, втулка, расположенная внутри полой штанги, установлена в подшипниковых узлах, закрепленных за внутреннюю верхнюю поверхность полой штанги, при этом в зацепление с внутренней зубчатой поверхностью входит зубчатое колесо, установленное на валу серводвигателя, закрепленного за внутреннюю нижнюю поверхность полой штанги, на втулку со стороны крепления воздуховода установлен сальник в кольцевом пазе, выполненном с торцевой части свободного конца полой штанги, где сальник фиксируется крышкой, закрепленной болтами за торцевую часть полой штанги.
Размещение на свободном конце полой штанги, в ее полости втулки с внутренней зубчатой поверхностью, выступающей за край полой штанги, с возможностью закрепления на ней воздуховода, и установка втулки, расположенной внутри полой штанги, в подшипниковых узлах, закрепленных за внутреннюю верхнюю поверхность полой штанги, где в зацепление с внутренней зубчатой поверхностью входит зубчатое колесо, установленное на валу серводвигателя, закрепленного за внутреннюю нижнюю поверхность полой штанги, а также установка на втулку со стороны крепления воздуховода сальника в кольцевом пазе, выполненном с торцевой части свободного конца полой штанги, с фиксацией сальника крышкой, закрепленной болтами за торцевую часть полой штанги, дает возможность независимо друг от друга поворачивать воздуховоды в вертикальной плоскости на 360 градусов, тем самым направляя воздушный поток в разные стороны, а следовательно, маневренность сельскохозяйственного беспилотного летательного аппарата - амфибии в воздушной среде повышается за счет быстрого изменения угла направления траектории и угла курса.
Наличие возможности независимо друг от друга поворачивать воздуховоды в вертикальной плоскости на 360 градусов позволяет устанавливать воздуховоды на угол относительного горизонта, при котором горизонтальная составляющая вектора тяги будет иметь максимальное значение при минимальном угле тангажа. В данном случае нет необходимости значительного увеличения силы тяги на всех шестилопастных воздушных винтах, а следовательно, затраты энергии при полете сельскохозяйственного беспилотного летательного аппарата - амфибии снижаются.
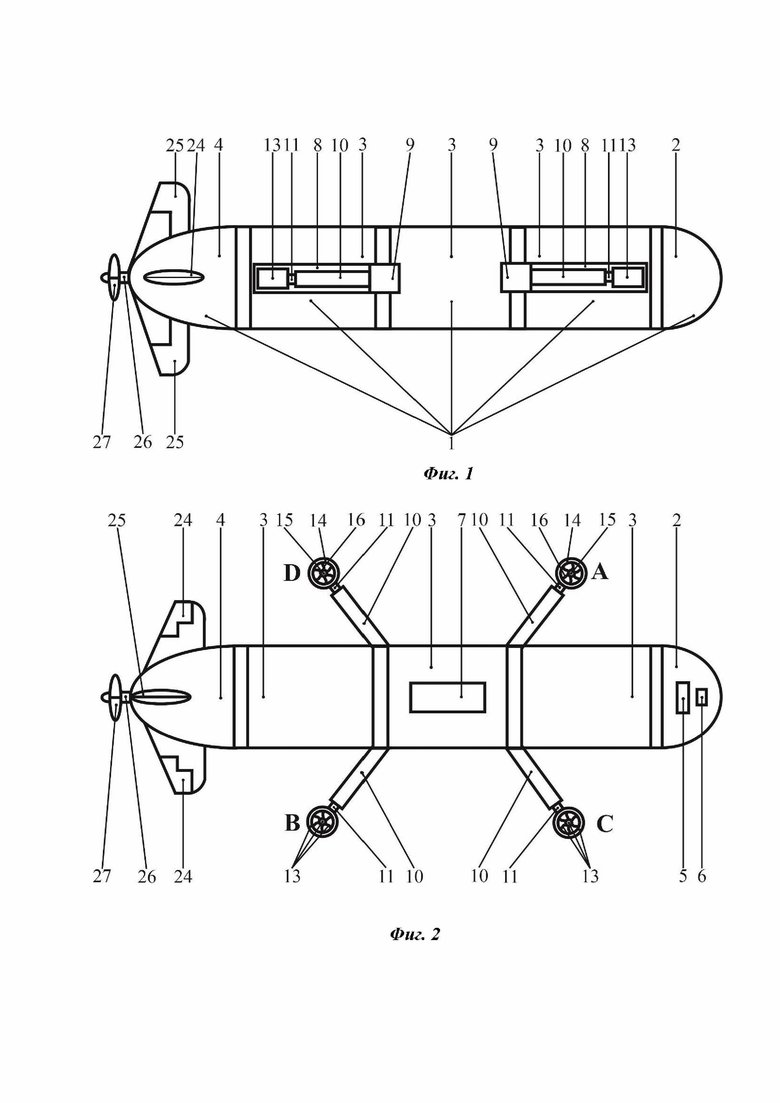
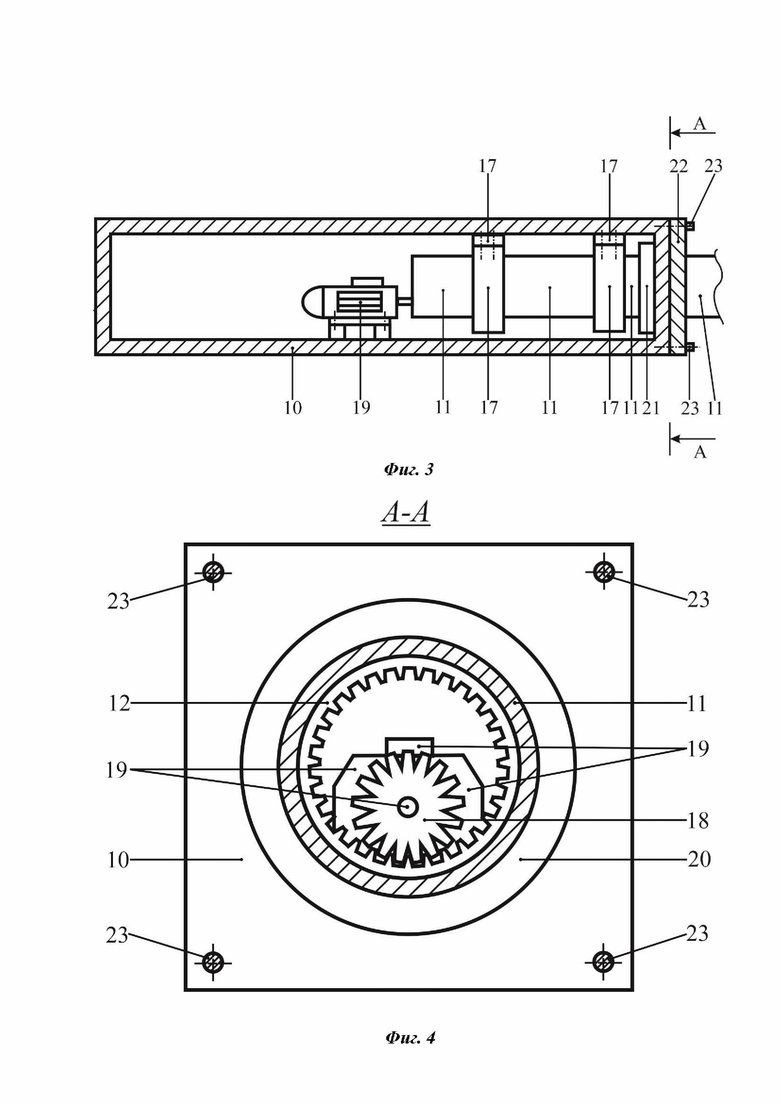
На фиг. 1 показан сельскохозяйственный беспилотный летательный аппарат - амфибия, вид сбоку; на фиг. 2 - то же, вид сверху; на фиг. 3 - разрез полой штанги; на фиг. 4 - разрез А-А на фиг. 3.
Сельскохозяйственный беспилотный летательный аппарат - амфибия включает корпус 1, состоящий из носовой части фюзеляжа 2, средней части фюзеляжа 3 и хвостовой части фюзеляжа 4. Носовая часть фюзеляжа 2 содержит ультразвуковой датчик 5 и подводную бинокулярную камеру 6, которые соединены с контроллером 7, расположенным сверху средней части фюзеляжа 3. По бокам средней части фюзеляжа 3 выполнены по два прямоугольных паза 8 с симметричным расположением относительно друг друга. Каждый прямоугольный паз 8 содержит водонепроницаемый рулевой механизм 9, к которому закреплена полая штанга 10, где на свободном конце полой штанги 10 в ее полости размещена втулка 11 с внутренней зубчатой поверхностью 12, выступающая за край полой штанги 10 с возможностью закрепления на ней воздуховода 13, выполненного в виде кольца 14, в котором установлен водонепроницаемый двигатель 15 с шестилопастным воздушным винтом 16. Втулка 11, расположенная внутри полой штанги 10, установлена в подшипниковых узлах 17, закрепленных за внутреннюю верхнюю поверхность полой штанги 10. Зубчатое колесо 18, установленное на валу серводвигателя 19, закрепленного за внутреннюю нижнюю поверхность полой штанги 10, входит в зацепление с внутренней зубчатой поверхностью 12. На втулку 11 со стороны крепления воздуховода 13 установлен сальник 20 в кольцевом пазе 21, выполненном с торцевой части свободного конца полой штанги 10. Сальник 20 фиксируется крышкой 22, закрепленной болтами 23 за торцевую часть полой штанги 10. Хвостовая часть фюзеляжа 4 оборудована по бокам рулем высоты 24, сверху и снизу - рулем направления 25, а в конце - водонепроницаемым двигателем 26 с гребным винтом 27.
Сельскохозяйственный беспилотный летательный аппарат - амфибия работает следующим образом. Изначально при установке водонепроницаемых двигателей 15 с шестилопастными воздушными винтами 16 создают группы А, В, С, D. В группах А и В находятся водонепроницаемые двигатели 15, обеспечивающие вращение шестилопастных воздушных винтов 16 по часовой стрелке, а в группах С и D - водонепроницаемые двигатели 15, обеспечивают вращение шестилопастных воздушных винтов 16 против часовой стрелки.
При вертикальном взлете беспилотного летательного аппарата - амфибии из каждого прямоугольного паза 8 водонепроницаемым рулевым механизмом 9 выводится полая штанга 10 с воздуховодом 13 и устанавливается на заданный угол относительно корпуса 1. Затем оператором подается сигнал на контроллер 7, с помощью которого запускаются водонепроницаемые двигатели 15, обеспечивая вращение всех шестилопастных воздушных винтов 16 с заданной скоростью. В результате этого шестилопастными воздушными винтами 16 создается суммарная вертикальная сила тяги, превышающая силу тяжести беспилотного летательного аппарата - амфибии, и тем самым обеспечивает его вертикальный взлет. При достижении беспилотным летательным аппаратом - амфибией необходимой высоты оператором подается сигнал на контроллер 7, который уменьшает обороты водонепроницаемых двигателей 15 до момента, когда скорость всех шестилопастных воздушных винтов 16 достигнет значения, при котором суммарная вертикальная сила тяги будет равна силе тяжести беспилотного летательного аппарата - амфибии. В результате беспилотный летательный аппарат - амфибия зависнет в воздухе.
Для выполнения полета беспилотного летательного аппарата - амфибии в горизонтальной плоскости вперед оператором подается соответствующий сигнал на контроллер 7. Контролер 7 увеличивает обороты водонепроницаемых двигателей 15 таким образом, чтобы скорость вращения шестилопастных воздушных винтов 16 групп В и D была больше скорости вращения шестилопастных воздушных винтов 16 групп А и С, а сам беспилотный летательный аппарат - амфибия не терял высоту. В результате этого беспилотный летательный аппарат - амфибия будет иметь угол наклона корпуса 1 по тангажу. Одновременно с этим серводвигателями 19, на валах которых установлены зубчатые колеса 18, входящие в зацепление с внутренней зубчатой поверхностью 12 втулок 11, производится вращение втулок 11 с воздуховодами 13 до момента, когда воздуховоды 13 установятся на угол относительного горизонта, при котором горизонтальная составляющая вектора силы тяги будет иметь максимальное значение. В результате создания у беспилотного летательного аппарата - амфибии угла наклона корпуса 1 по тангажу и установки воздуховодов 13 на угол относительного горизонта, при котором горизонтальная составляющая вектора силы тяги будет иметь максимальное значение при минимальном угле тангажа, происходит движение беспилотного летательного аппарата - амфибии в горизонтальной плоскости.
При реализации полета беспилотного летательного аппарата - амфибии в горизонтальной плоскости вправо или влево оператором подается соответствующий сигнал на контроллер 7. Например, при подаче сигнала о движении вправо, контроллер 7 увеличивает обороты водонепроницаемых двигателей 15 таким образом, чтобы скорость вращения шестилопастных воздушных винтов 16 групп А и D была больше скорости вращения шестилопастных воздушных винтов 16 групп В и С, а сам беспилотный летательный аппарат - амфибия не терял высоту. В результате этого беспилотный летательный аппарат - амфибия будет иметь угол наклона корпуса 1 по крену в правую сторону, а следовательно, он будет совершать движение в правую сторону. При этом воздуховоды 13 должны быть установлены в вертикальное положение. Если оператором подается сигнал на контроллер 7 о движении влево, то контроллер 7 увеличивает обороты водонепроницаемых двигателей 15 таким образом, чтобы скорость вращения шестилопастных воздушных винтов 16 групп В и С была больше скорости вращения шестилопастных воздушных винтов 16 групп А и D, а сам беспилотный летательный аппарат - амфибия не терял высоту. Таким образом, беспилотный летательный аппарат - амфибия будет иметь угол наклона корпуса 1 по крену в левую сторону, а следовательно, он будет совершать движение в левую сторону. В данном случае воздуховоды 13 должны находиться в вертикальном положении.
При торможении беспилотного летательного аппарата - амфибии оператор подает соответствующий сигнал на контроллер 7. Контроллер 7 стабилизирует обороты водонепроницаемых двигателей 15 таким образом, чтобы скорость вращения шестилопастных воздушных винтов 16 групп А и В была одинакова со скоростью вращения шестилопастных воздушных винтов 16 групп С и D. Одновременно с этим серводвигатели 19, на валах которых установлены зубчатые колеса 18, входящие в зацепление с внутренней зубчатой поверхностью 12 втулок 11, производят вращение втулок 11 с воздуховодами 13 до момента, когда поток воздушных масс из воздуховодов 13 не будет иметь одинаковое направление с горизонтальной составляющей вектора силы тяги. В результате этого беспилотный летательный аппарат - амфибия будет замедлять скорость. При достижении беспилотным летательным аппаратом - амфибией минимальной скорости движения серводвигателями 19 воздуховоды 13 переводятся в вертикальное положение, где контроллер 7 устанавливает обороты водонепроницаемых двигателей 15 таким образом, чтобы скорость вращения всех шестилопастных воздушных винтов 16 обеспечивала суммарную вертикальную силу тяги равную силе тяжести летательного аппарата. В результате беспилотный летательный аппарат - амфибия после того, когда его скорость снизится до нуля, зависнет в воздухе.
Для выполнения поворота беспилотного летательного аппарата - амфибии в горизонтальной плоскости оператор подает соответствующий сигнал на контроллер 7. Например, при подаче сигнала о повороте влево, контроллер 7 увеличивает обороты водонепроницаемых двигателей 15 групп А и В и в равной степени уменьшает обороты водонепроницаемых двигателей 15 групп С и D. В результате этого за счет разности скоростей вращения шестилопастных воздушных винтов 16 образовывается реактивный крутящий момент, обеспечивающий поворот беспилотного летательного аппарата - амфибии влево. Если оператором подается сигнал на контроллер 7 о повороте вправо, то контроллер 7 увеличивает обороты водонепроницаемых двигателей 15 групп С и D и в равной степени уменьшает обороты водонепроницаемых двигателей 15 групп А и В. В результате этого за счет разности скоростей вращения шестилопастных воздушных винтов 16 образовывается реактивный крутящий момент, обеспечивающий поворот беспилотного летательного аппарата - амфибии вправо. Во время поворота беспилотного летательного аппарата - амфибии вправо или влево воздуховоды 13 остаются в вертикальном положении.
При выполнении беспилотным летательным аппаратом - амфибией маневров во время полета, например, при изменении угла наклона траектории при наборе высоты, оператором подается соответствующий сигнал на контроллер 7. Контроллер 7 увеличивает обороты водонепроницаемых двигателей 15 с одновременным поворотом воздуховодов 13 в положение, при котором беспилотный летательный аппарат - амфибия будет максимально быстро набирать высоту. При достижении требуемой высоты оператор подает сигнал контроллеру 7, который стабилизирует обороты водонепроницаемых двигателей 15 таким образом, чтобы скорость вращения шестилопастных воздушных винтов 16 групп В и D была больше скорости вращения шестилопастных воздушных винтов 16 групп А и С, а сам беспилотный летательный аппарат - амфибия не терял высоту. Одновременно с этим воздуховоды 13 устанавливаются на угол относительного горизонта, при котором горизонтальная составляющая вектора силы тяги будет иметь максимальное значение.
При необходимости движения беспилотного летательного аппарата - амфибии в воде оператор устанавливает его над водным объектом и подает сигнал на контроллер 7 о выполнении погружения. Контроллер 7 подает команду рулевому механизму 9, который заводит в прямоугольные пазы 8 полые штанги 10 с воздуховодами 13. Одновременно с этим подается сигнал водонепроницаемому двигателю 26, который начинает вращать гребной винт 27, а руль высоты 24 устанавливается в положение погружения, то есть передняя кромка руля высоты 24 устанавливается ниже задней кромки. В результате этого беспилотный летательный аппарат - амфибия погружается в воду. При движении беспилотного летательного аппарата - амфибии в жидкости рулем высоты 24 регулируется глубина погружения, а рулем направления 25 регулируется направление движения. Например, при необходимости поворота беспилотного летательного аппарата - амфибии влево оператор подает соответствующий сигнал контроллеру 7, который дает команду устройству управления (на рисунках не показано), осуществляющему поворот руля направления 25 влево. В результате этого беспилотный летательный аппарат - амфибия совершает поворот влево. Если возникает необходимость поворота беспилотного летательного аппарата - амфибии вправо, то оператор подает соответствующий сигнал контроллеру 7. Устройство управления (на рисунках не показано) выполняет поворот руля направления вправо, а следовательно, беспилотный летательный аппарат - амфибия поворачивает вправо. При необходимости всплытия беспилотного летательного аппарата - амфибии оператором подается соответствующий сигнал на контроллер 7. Контроллер 7 дает команду устройству управления (на рисунках не показано), которое устанавливает руль высоты 24 таким образом, что передняя кромка руля высоты 24 располагается выше задней кромки. Таким образом, беспилотный летательный аппарат - амфибия всплывает на поверхность водного объекта.
Использование предложенного сельскохозяйственного беспилотного летательного аппарата - амфибии позволит с минимальным потреблением энергии выполнять обследование и изучение земель и водных объектов в сельском, лесном и водном хозяйстве.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАЛОРАЗМЕРНЫЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТОЛЕТНОГО ТИПА | 2023 |
|
RU2802879C1 |
| МОДУЛЬНАЯ КОНСТРУКЦИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2017 |
|
RU2681423C1 |
| МАЛОРАЗМЕРНЫЙ БЕСПИЛОТНЫЙ ВЕРТОЛЕТ БЕЗ АВТОМАТА ПЕРЕКОСА | 2023 |
|
RU2820276C1 |
| Мобильная беспилотная система для воздушного наблюдения и разведки | 2022 |
|
RU2793711C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2005 |
|
RU2288140C1 |
| Беспилотный летательный аппарат вертикального взлёта и посадки | 2023 |
|
RU2799426C1 |
| Воздушная транспортная система | 2021 |
|
RU2764036C1 |
| Беспилотный летательный аппарат вертикального взлета и посадки | 2017 |
|
RU2716391C2 |
| Беспилотный летательный аппарат вертикального взлёта и посадки и способ его изготовления | 2023 |
|
RU2819460C1 |
| ДИСТАНЦИОННО УПРАВЛЯЕМОЕ БОЕВОЕ УСТРОЙСТВО | 2022 |
|
RU2826654C2 |
Изобретение относится к летательным аппаратам. Сельскохозяйственный беспилотный летательный аппарат - амфибия включает корпус, состоящий из носовой части фюзеляжа, средней части фюзеляжа и хвостовой части фюзеляжа. По бокам средней части фюзеляжа выполнены по два прямоугольных паза с симметричным расположением относительно друг друга, причем каждый прямоугольный паз содержит водонепроницаемый рулевой механизм, к которому закреплена полая штанга, а на ее свободном конце закреплен воздуховод, выполненный в виде кольца, в котором установлен водонепроницаемый двигатель с шестилопастным воздушным винтом. На свободном конце полой штанги в ее полости размещена втулка с внутренней зубчатой поверхностью, выступающая за край полой штанги с возможностью закрепления на ней воздуховода. Втулка установлена в подшипниковых узлах, закрепленных за внутреннюю верхнюю поверхность полой штанги. В зацепление с внутренней зубчатой поверхностью входит зубчатое колесо, установленное на валу серводвигателя, закрепленного за внутреннюю нижнюю поверхность полой штанги. На втулку со стороны крепления воздуховода установлен сальник в кольцевом пазе, выполненном с торцевой части свободного конца полой штанги, где сальник фиксируется крышкой, закрепленной болтами за торцевую часть полой штанги. Обеспечивается повышение маневренности и снижение затрат энергии при полете. 4 ил.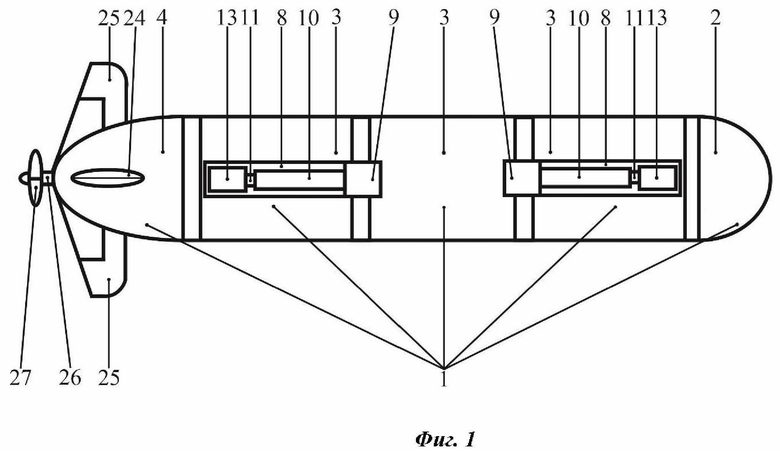
Сельскохозяйственный беспилотный летательный аппарат – амфибия, включающий корпус, состоящий из носовой части фюзеляжа, средней части фюзеляжа и хвостовой части фюзеляжа, где носовая часть фюзеляжа содержит ультразвуковой датчик и подводную бинокулярную камеру, которые соединены с контроллером, расположенным сверху средней части фюзеляжа, при этом по бокам средней части фюзеляжа выполнены по два прямоугольных паза с симметричным расположением относительно друг друга, причем каждый прямоугольный паз содержит водонепроницаемый рулевой механизм, к которому закреплена полая штанга, а на ее свободном конце закреплен воздуховод, выполненный в виде кольца, в котором установлен водонепроницаемый двигатель с шестилопастным воздушным винтом, хвостовая часть фюзеляжа оборудована по бокам рулем высоты, сверху и снизу – рулем направления, а сзади – водонепроницаемым двигателем с гребным винтом, отличающийся тем, что на свободном конце полой штанги в ее полости размещена втулка с внутренней зубчатой поверхностью, выступающая за край полой штанги с возможностью закрепления на ней воздуховода, втулка, расположенная внутри полой штанги, установлена в подшипниковых узлах, закрепленных за внутреннюю верхнюю поверхность полой штанги, при этом в зацепление с внутренней зубчатой поверхностью входит зубчатое колесо, установленное на валу серводвигателя, закрепленного за внутреннюю нижнюю поверхность полой штанги, на втулку со стороны крепления воздуховода установлен сальник в кольцевом пазе, выполненном с торцевой части свободного конца полой штанги, где сальник фиксируется крышкой, закрепленной болтами за торцевую часть полой штанги.
| CN 218316114 U, 17.01.2023 | |||
| АВТОМАТИЧЕСКОЕ ПЕРЕКЛЮЧАЮЩЕЕ УСТРОЙСТВО СТРЕЛЯЮЩЕЙ СКВАЖИННОЙ АППАРАТУРЫ | 0 |
|
SU213733A1 |
| US 20240076065 A1, 07.03.2024 | |||
| CN 110282129 A, 27.09.2019 | |||
| US 9493235 B2, 15.11.2016. | |||

