Изобретение относится к области противодействия выполнению задач беспилотными летательными аппаратами (БПЛА) и может быть использовано для точного обнаружения БПЛА, в том числе осуществляющего полет в режиме радиомолчания, распознавания и дистанционного нарушения работы его каналов радиоуправления и геопозиционирования.
Известно устройство электронного противодействия БПЛА, описанное в патенте Тайваня на полезную модель TWM 528037, 01.09.2016. Устройство включает корпус, выполненный в формфакторе огнестрельного оружия, в котором установлено два генератора частот в виде директорных антенн, обеспечивающих подавление сигналов GPS и канала управления БПЛА на рабочей частоте 2,4 ГГц. В корпусе также размещен контроллер, блок питания и охлаждающие вентиляторы. Директорные антенны содержат центральный стержень, на котором размещен набор проводящих элементов (вибраторов) в виде выступающих рамок прямоугольной формы.
Недостатком данного технического решения является продолжительное время обнаружения БПЛА и наведения на него для радиопротиводействия, обусловленное необходимостью визуального определения нахождения БПЛА, невозможностью идентификации типа БПЛА и сигналов управления им, и подавление его канала радиоуправления в узком диапазоне, только на рабочей частоте 2,4 ГГц.
Известно устройство электронного противодействия БПЛА, описанное в патенте на полезную модель RU 178 484, опубликованное 05.04.2018, Бюл. №10, содержащее корпус, установленные на корпусе первую директорную антенну для формирования направленного электромагнитного поля, обеспечивающего создание помех в канале управления БПЛА, и вторую директорную антенну для формирования направленного электромагнитного поля, обеспечивающего создание помех в канале геопозиционирования БПЛА, и размещенный в корпусе блок питания, первый генераторный узел канала подавления сигналов управления, связанный через первый усилитель мощности с первой директорной антенной, а также второй генераторный узел канала подавления сигналов геопозиционирования, связанный через второй усилитель мощности со второй директорной антенной, а блок питания связан с генераторными узлами и усилителями мощности, при этом первая и вторая директорные антенны выполнены с дисковыми элементами из электропроводящего материала.
Недостатками данного технического решения является продолжительное время обнаружения БПЛА и наведения на него для радиопротиводействия, обусловленное необходимостью визуального определения нахождения БПЛА, невозможностью идентификации типа БПЛА и сигналов управления им, и подавление его каналов радиоуправления и геопозиционирования в узких диапазонах 2,4 - 2,5 ГГц и 1,5 - 1,65 ГГц соответственно.
Наиболее близким по технической сущности к заявленному является устройство обнаружения и радиопротиводействия применению беспилотных летательных аппаратов, описанное в патенте на полезную модель RU 223 490, опубликованное 21.02.2024, Бюл. №6. Известное устройство содержит корпус, первый, второй, третий, четвертый и пятый генераторные узлы, первый, второй, третий, четвертый и пятый усилители мощности, первую, вторую, третью, четвертую и пятую директорные антенны, блок питания, коллинеарную антенну, две направленные логопериодические антенны, радиоприемное устройство, устройство цифровой обработки сигналов, модуль хранения информации, модуль отображения информации и модуль управления, при этом первый, второй, третий, четвертый и пятый генераторные узлы соединены соответственно через первый, второй, третий, четвертый и пятый усилители мощности с соответствующей директорной антенной, коллинеарная антенна и направленные логопериодические антенны соединены с соответствующими входами радиоприемного устройства, выходы которого соединены с советующими входами устройства цифровой обработки сигналов, выход которого соединен с модулем управления, модуль управления соединен с модулем хранения информации, модулем отображения информации и с генераторными узлами, а блок питания соединен со всеми электропотребляющими элементами устройства, которое и выбрано в качества прототипа.
Известное устройство электронного противодействия БПЛА за счет использования нескольких директорных антенн, устройства цифровой обработки сигналов, обеспечивает идентификацию типа БПЛА и сигналов управления им, а также подавление его каналов радиоуправления и геопозиционирования в широком диапазоне.
Однако недостатком прототипа является продолжительное время обнаружения БПЛА и наведения на него для радиопротиводействия, обусловленное невозможностью определения местоположения в пространстве БПЛА, осуществляющего полет в режиме радиомолчания, ограниченный сектор обнаружения БПЛА и ручное наведение устройства на БПЛА для последующего его подавления.
Техническим результатом заявляемого изобретения является сокращение времени обнаружения БПЛА и наведения на него для радиопротиводействия.
Указанный технический результат достигается за счет того, что в известном устройстве обнаружения БПЛА и радиопротиводействия их применению, содержащем корпус, первый, второй, третий, четвертый и пятый генераторные узлы, соединенные соответственно через первый, второй, третий, четвертый и пятый усилители мощности с соответствующей директорной антенной, блок питания, коллинеарную антенну, две направленные логопериодические антенны, радиоприемное устройство, устройство цифровой обработки сигналов, модуль хранения информации и модуль управления, при этом коллинеарная антенна и направленные логопериодические антенны соединены с соответствующими входами радиоприемного устройства, выходы которого соединены с советующими входами устройства цифровой обработки сигналов, выход которого соединен с модулем управления, модуль управления соединен с модулем хранения информации и с генераторными узлами, а блок питания соединен со всеми электропотребляющими элементами устройства, дополнительно введены третья и четвертая направленные логопериодические антенны, соединенные с соответствующими входами радиоприемного устройства, фазированная антенная решетка полусферического обзора (ФАРПО), распределительное устройство ФАРПО, передатчик ФАРПО, аналого-цифровые преобразователи, цифровое устройство пространственно-временной обработки сигнала радиолокатора, электромагнитный экран, установленный под ФАРПО. На опоре закреплен двигатель, соединенный с механизмом поворота, на котором закреплен корпус. Двигатель соединен с механизмом поворота, на котором закреплены директорные антенны. Пульт управления соединен с модулем управления и цифровым устройством пространственно-временной обработки сигнала радиолокатора. Выходы ФАРПО соединены с соответствующими входами аналого-цифровых преобразователей. Выходы аналого-цифровых преобразователей соединены с соответствующими входами модуля управления. Передатчик ФАРПО через распределительное устройство ФАРПО подключен к входам ФАРПО. Модуль управления соединен с передатчиком ФАРПО, с цифровым устройством пространственно-временной обработки сигнала радиолокатора и двигателями. Направленные логопериодические антенны и ФАРПО закреплены на антенно-мачтовом устройстве.
Кроме того, пульт управления выполнен в виде дисплея с тачскрином или в виде персональной ЭВМ (ПЭВМ) с программным обеспечением и с возможностью выноса на расстояние L (м) от устройства.
Кроме того, механизмы поворота обеспечивают поворот корпуса в горизонтальной плоскости на 360°, и поворот директорных антенн в вертикальной плоскости на 180°.
Кроме того, блок питания включает разъем для подключения к внешней сети электропитания, а также, по меньшей мере, одну аккумуляторную батарею и преобразователь-стабилизатор питающего напряжения, установленные в корпусе устройства.
Кроме того, антенно-мачтовое устройство выполнено телескопическим.
Благодаря новой совокупности существенных признаков за счет введения в устройство двух направленных логопериодических антенн, фазированной антенной решетки полусферического обзора, распределительного устройства ФАРПО, передатчика ФАРПО, аналого-цифровых преобразователей, цифрового устройства пространственно-временной обработки сигнала радиолокатора и опоры обеспечивается определение местоположения в пространстве БПЛА осуществляющего полет в режиме радиомолчания с последующим наведением на него устройства в автоматическом или ручном режимах. Этим достигается сокращение времени обнаружения БПЛА и наведения на него для радиопротиводействия.
Заявленное устройство поясняется чертежами:
фиг. 1 - внешний вид устройства обнаружения беспилотных летательных аппаратов (БПЛА) и радиопротиводействия их применению;
фиг. 2 - блок-схема устройства обнаружения БПЛА и радиопротиводействия их применению;
фиг. 3 - вид спереди устройства обнаружения БПЛА и радиопротиводействия их применению;
фиг. 4 - конструкция АМУ, вид сверху;
фиг. 5 - конструкция директорной антенны;
фиг. 6 - конструкция коллиенарной антенна;
фиг. 7 - конструкция направленной логопериодической антенны;
фиг. 8 - конструкция фазированной антенной решетки полусферического обзора.
Конструктивные элементы устройства обозначены на фигурах следующими позициями:
1 - корпус;
2.1 - первый генераторный узел;
2.2 - второй генераторный узел;
2.3 - третий генераторный узел;
2.4 - четвертый генераторный узел;
2.5 - пятый генераторный узел;
3.1 - первый усилитель мощности;
3.2 - второй усилитель мощности;
3.3 - третий усилитель мощности;
3.4 - четвертый усилитель мощности;
3.5 - пятый усилитель мощности;
4.1 - первая директорная антенна;
4.2 - вторая директорная антенна;
4.3 - третья директорная антенна;
4.4 - четвертая директорная антенна;
4.5 - пятая директорная антенна;
5 - блок питания;
6 - коллинеарная антенна;
7.1 - первая направленная логопериодическая антенна;
7.2 - вторая направленная логопериодическая антенна;
7.3 - третья направленная логопериодическая антенна;
7.4 - четвертая направленная логопериодическая антенна;
8 - радиоприемное устройство;
9 - устройство цифровой обработки сигналов;
10 - модуль хранения информации;
11 - модуль управления;
12 - фазированная антенная решетка полусферического обзора (ФАРПО);
13 - распределительное устройство ФАРПО;
14 - передатчик ФАРПО;
15 - аналого-цифровой преобразователь;
16 - цифровое устройство пространственно-временной обработки сигнала радиолокатора;
17 - экран;
18 - опора;
19 и 21 - двигатель;
20 и 22 - механизм поворота;
23 - пульт управления;
24 - антенно-мачтовое устройство (АМУ);
25 - синтезатор помехи;
26 - генератор управляемый напряжением (ГУН);
27 - разъем для подключения к внешней сети электропитания;
28 - аккумуляторная батарея (АКБ);
29 - преобразователь-стабилизатор питающего напряжения;
30 - крышка отсека АКБ;
31 - отверстия для крепления опоры 18 на поверхности объекта;
32 - дисковые элементы антенны;
33 - контакты фидерных устройств;
34 - гайка;
35 - фидерные устройства.
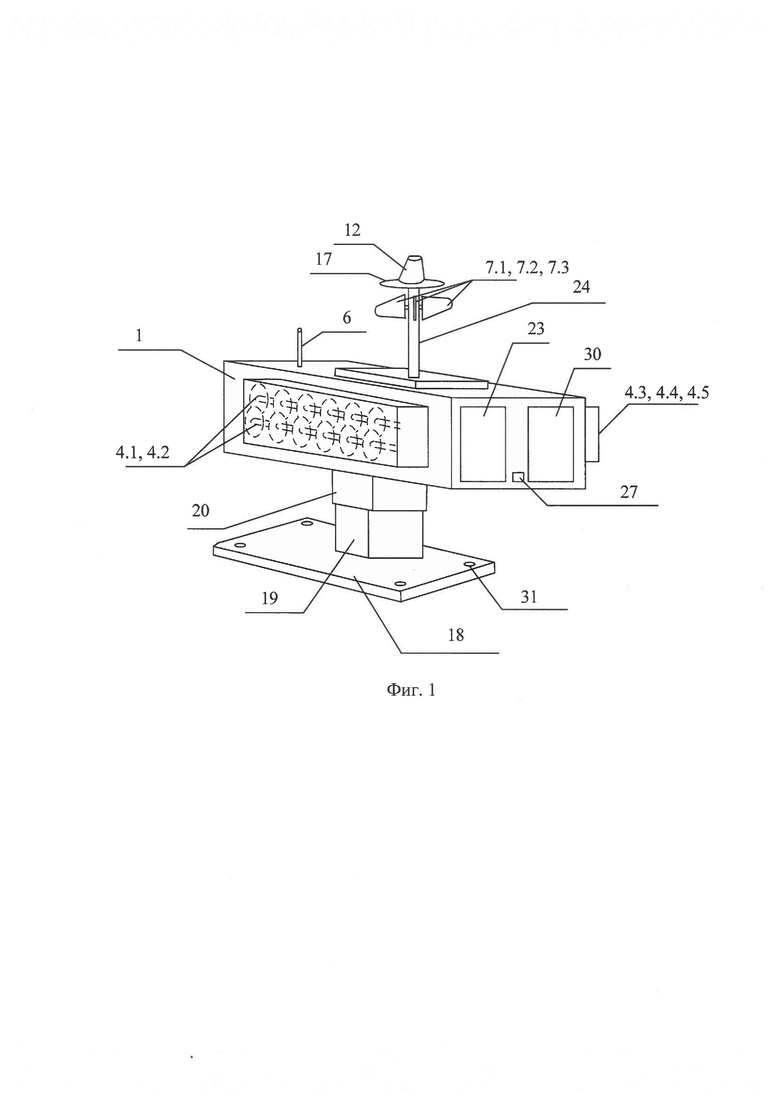
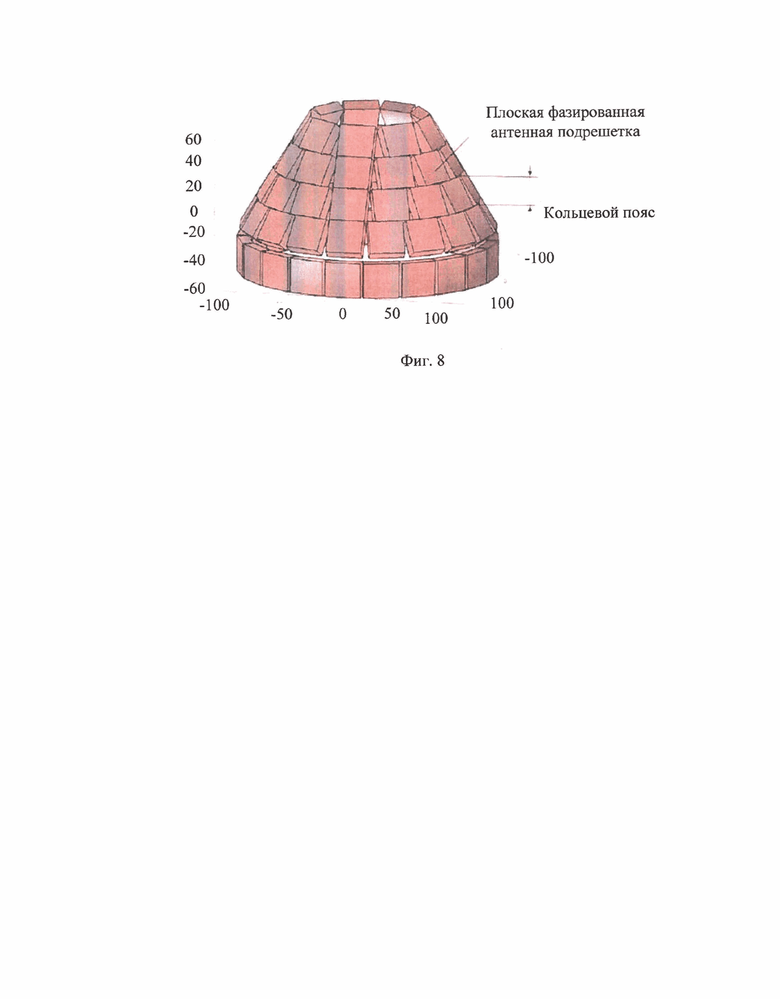
Внешний вид устройства обнаружения БПЛА и радиопротиводействия их применению представлен на фиг. 1. Корпус 1 закреплен на механизме поворота 20, который соединен с двигателем 19. Двигатель 19 закреплен на опоре 18. Такое соединение обеспечивает быстрый поворот корпуса 1 в горизонтальной плоскости на 360° при наведении на БПЛА. По краям опоры 18 располагаются отверстия 31 для ее крепления на поверхности объекта, например, на крыше здания для обеспечения устойчивости.
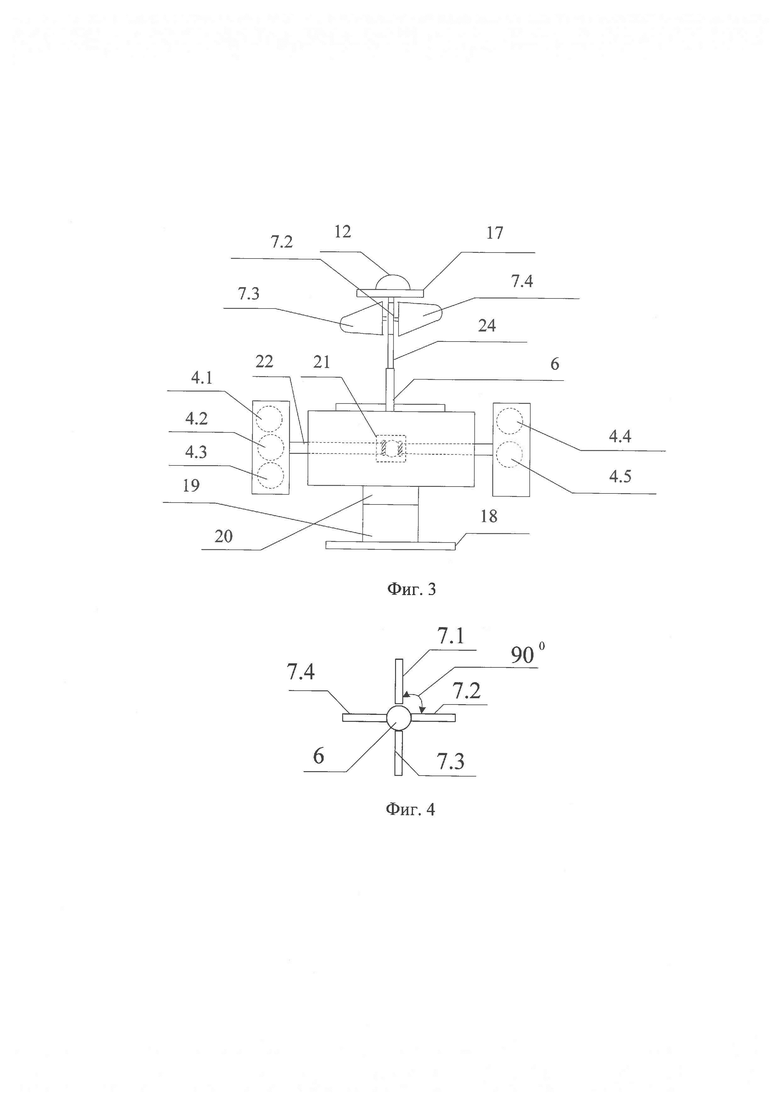
Корпус 1 предназначен для размещения во внутренней полости электронных узлов (фиг. 2). Корпус 1 для надежности эксплуатации устройства, предпочтительно, выполнить влагозащитным. С правой и левой части корпуса 1 под радиопрозрачной крышкой, располагаются пять директорных антенн 4.1, 4.2, 4.3, 4.4 и 4.5, закрепленных параллельно на некотором расстоянии друг от друга посредством диэлектрических гаек 34. С одной стороны, установлены три директорные антенны, например, 4.1, 4.3 и 4.5, а с другой две директорные антенны, например, 4.2 и 4.4 (фиг. 3), при этом одно место резервируется для установки дополнительной директорной антенны под дополнительный подавляемый диапазон. Директорные антенны 4.1, 4.2, 4.3, 4.4, 4.5 прикреплены к механизму поворота 22, который в свою очередь соединен с двигателем 21. Такое соединение обеспечивает быстрый поворот директорных антенн 4.1, 4.2, 4.3, 4.4, 4.5 в вертикальной плоскости на 180° при наведении на БПЛА. Директорные антенны 4.1, 4.2, 4.3, 4.4, 4.5 подключаются к соответствующим усилителям мощности 3.1, 3.2, 3.3, 3.4 и 3.5 посредством фидерных устройств 35 через контакты 33.
Сверху корпуса 1 в средней части установлено АМУ 24 на котором закреплены ФАРПО 12 и направленные логопериодические антенны 7.1, 7.2, 7.3, 7.4 (фиг. 1). Сверху корпуса 1 в передней части установлена коллинеарная антенна 6. Под ФАРПО 12 установлен электромагнитный экран 17 для снижения электромагнитного влияния излучения ФАРПО 12 на логопериодические антенны 7.1, 7.2, 7.3, 7.4 и коллинеарную антенну 6.
В корпусе 1 также размещен блок питания устройства 5, который включает аккумуляторную батарею 28, а также, по меньшей мере, один преобразователь-стабилизатор питающего напряжения 29. В устройстве может быть применена литий-полимерная аккумуляторная батарея 28, собранная из 4, 5 или 6 ячеек с напряжением 3,7 Вольт каждая. Аккумуляторная батарея 28 расположена в отсеке корпуса 1 и закрывается крышкой 30, для оперативности ее замены в случае разрядки и необходимости продолжения работы устройства в случае отсутствия электропитания от внешнего источника электропитания, например, от промышленной электросети. Импульсный преобразователь-стабилизатор питающего напряжения 29 обеспечивает стабильное напряжение питания всех электронных узлов устройства, независимо от снижающегося со временем напряжения на аккумуляторной батарее. Применение импульсных преобразователей-стабилизаторов 29 позволяет обеспечивать стабильным электропитанием усилители мощности 3.1, 3.2, 3.3, 3.3, 3.4, 3.5 при снижении напряжения на аккумуляторной батареи, что в ряде случаев может быть необходимым, особенно в случае применения усилителей с выходной мощностью 20 Вт и более. Заряд батареи 28 осуществляется либо на внешнем зарядном устройстве, либо посредством подключения внешнего источника электропитания через разъем 27. Каждая ячейка аккумуляторной батареи подключается к своему контакту, что позволяет осуществлять балансировку аккумуляторной батареи в процессе ее зарядки, а также проводить диагностику состояния аккумуляторной батареи на предмет обнаружения дефектных или преждевременно износившихся ячеек. Управление устройством осуществляется с пульта управления 23, который установлен с тыльной стороны корпуса 1 и выполнен либо в виде ПЭВМ с программным обеспечением, либо в виде дисплея с тачскрином. Для безопасности работы пульт управления 23 выполнен выносным на расстояние L (м) от устройства, например, устройство может быть установлено на крышу здания, а пульт управления 23, в виде ПЭВМ, можно разместить в безопасном месте, например, в подвале здания. ПЭВМ с программным обеспечением, может управлять устройством удаленно, через различные каналы связи.
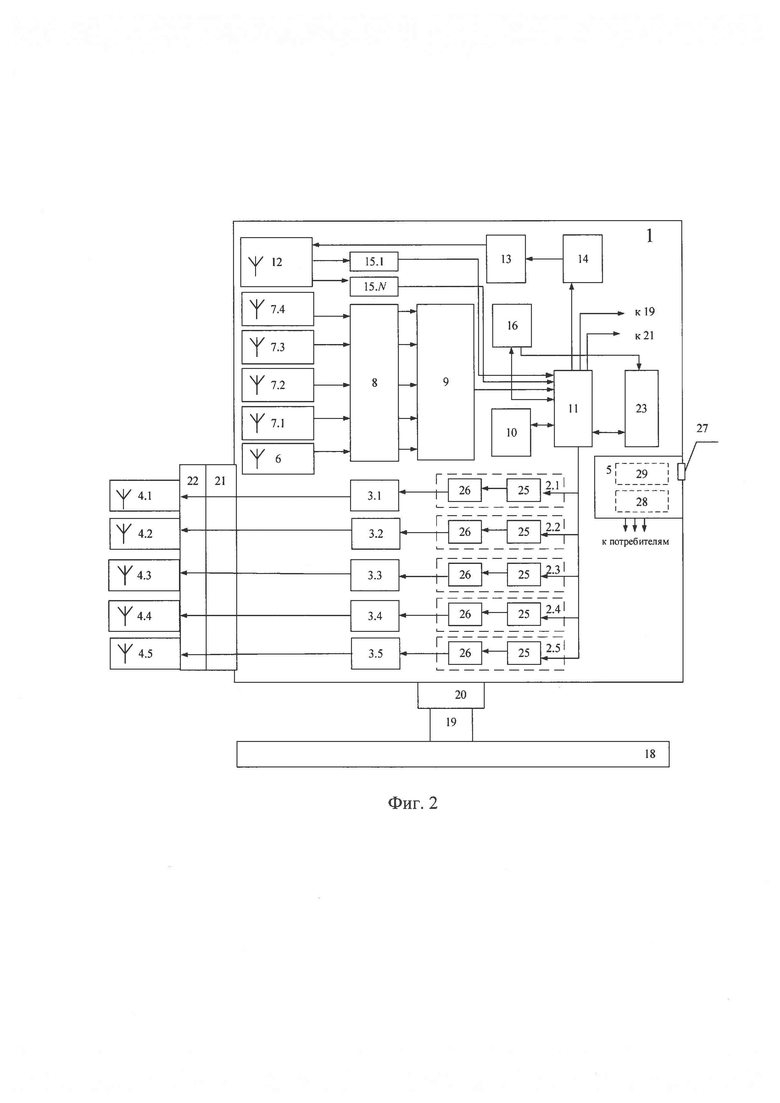
Генераторные узлы 2.1, 2.2, 2.3 и 2.4 (см. фиг. 2) предназначены для формирования помехового сигнала в установленном диапазоне частот: 390 - 490 МГц, 850 - 960 МГц, 2200 - 2600 МГц и 4900 - 5900 МГц соответсвенно. Пятый генераторный узел 2.5 предназначен для формирования помехового сигнала в диапазоне частот 1200 - 1260 МГц и 1570-1610 МГц.
Каждый из указанных генераторных узлов содержит ГУН 26 и синтезатор помехи 25. Синтезатор помехи 25 может быть реализован на микросхемах, например, микросхеме прямого цифрового синтеза типа AD9954, которая обеспечивает формирование помеховых сигналов с изменяющейся частотой по линейному и нелинейному закону. Сформированный помеховый сигнал переносится на радиочастоту с помощью ГУН 26, представляющего собой смеситель и гетеродин. Смеситель может быть собран на микросхеме РЕ4140. Гетеродин может быть собран на микросхеме STW81200, которая обеспечивает формирование помехового сигнала в диапазоне частот от 50 до 6000 МГц.
Усилители мощности 3.1,…,3.5 предназначены для усиления сигнала до требуемого уровня в заданном диапазоне. Усилитель мощности может быть собран по трехкаскадной схеме на базе известных микросхем, например, микросхеме типа SBB5089 (усилитель диапазона 50 - 6000 МГц, 20 дБ) и типа QPA2237, мощностью до 10 Вт.Третий каскад усиления может быть реализован на модульных усилителях типа АРСТ-000-111-32V. Выходная мощность сигнала в диапазонах 390 - 490 МГц, 850 - 960 МГц, 2200 - 2600 МГц - не более 30 Вт, в диапазоне 4900 - 5900 МГц - не более 15 Вт.Выходная мощность сигнала на выходе усилителя мощности 3.5 не более 10 Вт.
В корпусе 1 предусмотрено место для установки шестого генераторного узла 2.6, шестого 3.6 усилителя мощности для работы с дополнительной директорной антенной 4.6 для подавления еще одного диапазона, например, 650 - 790 МГц или дополнительного, аналогичного установленным комплектам, например, 2.1, 3.1, 4.1, для повышения надежности радиоподавления БПЛА в одном из диапазонов 390 - 490 МГц, 850 - 960 МГц, 2200 - 2600 МГц, 4900 - 5900 МГц или 1200 - 1260 МГц и 1570 - 1610 МГц.
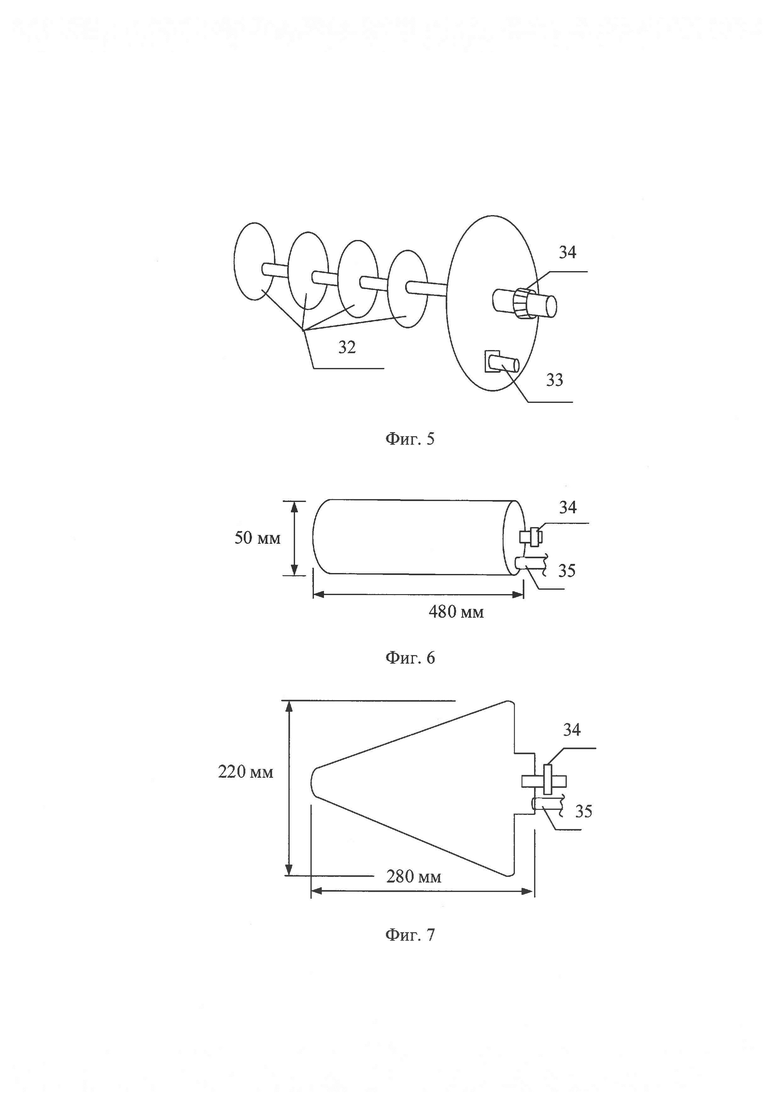
Директорные антенны 4.1, 4.2, 4.3, 4.4 и 4.5 предназначены для формирования направленного электромагнитного поля, обеспечивающего создание помех в каналах управления и геопозиционирования БПЛА. Директорные антенны могут иметь любое количество пассивных дисковых элементов 32 (директоров) в зависимости от требований к усилению и диаграмме направленности. Директорные антенны могут быть построены по известным схемам. Вариант их построения рассмотрен в Патенте 178 484 «Устройство электронного противодействия беспилотным летательным аппаратам», опубликовано: 05.04.2018 Бюл. №10.
Директорные антенны 4.1, 4.2, 4.3, 4.4 и 4.5 снабжены фидерными устройствами 35 для подведения энергии радиочастотного сигнала к антеннам.
Радиоприемное устройство 8 предназначено для обнаружения радиосигналов каналов управления БПЛА и каналов передачи данных с БПЛА, радиоизлучений в контролируемой зоне. Радиоприемное устройство 8 может быть собрано на базе известных схемотехнических решений, например, на основе платы SDR Elonwood HackRF One, обеспечивающей прием радиосигналов в диапазоне частот 1 МГц до 6 ГГц.
Устройство цифровой обработки сигналов 9 предназначено для анализа сигнально-помеховой обстановки и регистрации радиосигналов каналов управления и каналов передачи данных с БПЛА. Устройство цифровой обработки сигналов 9 может быть реализовано на микросхеме аналого-цифрового преобразования, например, 5400ТР045А-001, оперативного-запоминающего устройства и специализированного процессора ЦОС, например, двухядерном процессоре OMAP-L138.
Модуль хранения информации 10 предназначен для хранения информации о известных спектрах радиосигналов управления БПЛА разных типов и записи спектров радиосигналов для последующего анализа, если принятый сигнал отсутствует в модуле. Модуль хранения информации 10 может быть реализован в различных вариантах, например, в виде флэш-памяти: 1 флэш-чип SPI объемом 8 ГБ (встроенный), 1 слот для карт MMC/SD, который взаимодействует с двухядерном процессоре OMAP-L138.
Модуль управления 11 предназначен для управления и контроля за работой составных элементов устройства, формирования команд для наведения направленных антенн устройства на БПЛА и обработки кодовых последовательностей, поступающих с аналого-цифровых
преобразователей 15.1,…,15.JV соответствующих квадратурным
составляющим принятого подрешеткой комплексного аналогового сигнала и осуществления операции их взвешенного сложения и формирование в цифровом виде трех приемных диаграмм направленности, соответствующих трем активным зонам ФАРПО 12. Модуль управления 11 может быть реализован в различных вариантах, например, в виде двухядерного процессора OMAP-L138 под управлением ОС Linux и платы управления устройства антенно-поворотного МИК-АПУ модуля антенного Р-431АМ [Руководство по эксплуатации ЖНКЮ.303246.001 РЭ], которая может работать автономно в режиме внешнего управления по интерфейсу RS-232 и в режиме внешнего управления от ЭВМ по интерфейсу RS-485.
Опора 18 с закрепленным на ней двигателем 19, соединенного с механизмом поворота 20 составляют опорно-поворотный механизм (ОПМ) на котором крепится корпус 1. Двигатель 21, соединен с механизмом поворота 22, к которому крепятся директорные антенны 4.1, 4.2, 4.3, 4.4, 4.5 для обеспечения их поворота в вертикальной плоскости на 180°.
Двигатели 19 и 21 предназначены для обеспечения привода механизма поворота 20 и 22 соответственно. Двигатели 19 и 21 могут быть реализованы в различных вариантах, например, в виде электродвигателя Д-28А ТУ ОДС.515.248. [Антенно-поворотное устройство МИК-АПУ модуля антенного Р-431АМ. Руководство по эксплуатации ЖНКЮ.303246.001 РЭ]. Механизм поворота 20 предназначен для поворота устройства в горизонтальной плоскости на 360°. Механизм поворота 22 предназначен для обеспечения поворота директорных антенн 4.1, 4.2, 4.3, 4.4, 4.5 в вертикальной плоскости на 180°. Механизмы поворота 20 и 22 могут быть реализованы в различных вариантах, например, в виде редуктора азимута, редуктора угла места и платы контроллера управления устройства антенно-поворотного МИК-АПУ модуля антенного Р-431АМ [Антенно-поворотное устройство МИК-АПУ модуля антенного Р-431АМ. Руководство по эксплуатации ЖНКЮ.303246.001 РЭ].
Коллинеарная антенна 6, первая 7.1, вторая 7.2, третья 7.3, четвертая 7.4 направленная логопериодическая антенна предназначены для приема радиосигналов управления и передачи телеметрической информации между БПЛА и наземным пультом управления. Размещение антенн на АМУ 24 представлено на фиг. 4.
Коллинеарная антенна 6 и направленные логопериодические антенны 7 могут быть построены по известным схемам. Вариант их построения рассмотрен в учебнике Г.З. Айзенберг, В.Г. Ямпольский, О.Н. Терешин. Антенны УКВ, часть 1, М, Связь 1977, 384 с.
Фазированная антенная решетка полусферического обзора (ФАРПО) 12 предназначена для излучения в пространство радиолокационных сигналов и их приема, что позволяет обеспечивать обнаружение БПЛА осуществляющих полет в режиме радиомолчания и определять его положение в пространстве.
Фазированная антенная решетка полусферического обзора 12 может быть построена по известным схемам. Схема и принцип ее работы совместно с распределительным устройством 13, передатчиком 14, аналого-цифровым преобразователем 15, цифровым устройством пространственно-временной обработки сигнала радиолокатора 16, представлены в патенте RU 2406193 С1 «Неподвижная квазиконформная фазированная антенная решетка с полусферической рабочей зоной», опубл. 10.12.2010, Бюл. №34. ФАРПО 12 может быть реализована в виде квазиконформной фазированной антенной решетки с полусферическим обзором, содержащей пять поясов из плоских фазированных антенных подрешеток. В нижнем первом поясе размещена двадцать одна подрешетка, во втором поясе размещены восемнадцать подрешеток, в третьем поясе - пятнадцать подрешеток, в четвертом поясе - двенадцать подрешеток, в пятом поясе - девять подрешеток (фиг. 8).
Обзор полусферического пространства выполняется фазово-конформным способом одновременно тремя лучами так, что проекции этих лучей на азимутальную плоскость отстоят друг от друга на 120°. Передающие каналы каждой подрешетки соединены с передатчиком 14 через распределительное устройство 13. При сканировании в азимутальной плоскости все три активные зоны синхронно перемещаются по кругу конформным способом. Сканирование по углу места (в вертикальной плоскости) осуществляется фазовым способом каждой активной зоной независимо. Возможность одновременного формирования трех активных зон ФАРПО 12 обеспечивает трехкратное снижение времени обзора и повышается точность измерения координат низколетящих БПЛА в условиях воздействия переотраженных от подстилающей поверхности сигналов.
Устройство работает следующим образом. Пользователь подает электропитание на устройство. После включения питания электропитание подается на все элементы устройства в корпусе 1. За счет использования коллинеарной антенны 6 и четырех направленных логопериодических антенн 7.1,…,7.4 сектор обнаружения радиосигналов от БПЛА равен 360° (фиг. 4). Фазированная антенная решетка полусферического обзора 12 осуществляет передачу радиолокационных сигналов в пространство для определения местоположения БПЛА в случае его нахождения в зоне обнаружения, в том числе и осуществляющего полет в режиме радиомолчания. Отраженный радиосигнал от БПЛА в виде синфазной (плоской) волны падает на поверхность ФАРПО 12. Фазировка антенных подрешеток активной зоны в режиме приема выполняется такой, чтобы на выходе каждой подрешетки принимаемый сигнал был бы максимальным. Это будет возможным в случае, если направление приемного луча каждой подрешетки фазовым способом установить коллинеарно направлению передающего луча. Принятый аналоговый комплексный сигнал на выходе каждой подрешетки поступает в аналого-цифровой преобразователь 15, где проходит процедуру оцифровки. На выходе каждого аналого-цифрового преобразователя 15.1,…,15.N формируется кодовая последовательность, соответствующая квадратурным составляющим принятого подрешеткой комплексного аналогового сигнала. Далее указанные кодовые последовательности поступают на соответствующий вход модуля управления 11, где в цифровом виде происходит операция их взвешенного сложения и формирование в цифровом виде трех приемных диаграмм направленности, соответствующих трем активным зонам ФАРПО 12. Далее эти оцифрованные сигналы поступают в цифровое устройство пространственно-временной обработки сигнала радиолокатора 16 и после обработки отображаются на экране пульта управления 23 с указанием местонахождения БПЛА. Кроме того, в случае нахождения БПЛА в одном из секторов, на удалении не менее 1000 м от устройства, при мощности передатчика БПЛА не менее 100 мВт, в условиях прямой радиовидимости и отсутствия индустриальных или преднамеренных помех, антеннами устройства принимаются радиосигналы от каналов радиоуправления БПЛА, при этом на коллинеарную антенну 6 (фиг. 6) принимаются радиосигналы в диапазоне 390 - 490 МГц, на направленные логопериодические антенны 7.1, 7.2, 7.3 и 7.4 (фиг. 7) принимаются радиосигналы в диапазоне 700 - 6000 МГц. Принятый сигнал или сигналы через фидерные устройства 32 поступает в радиоприемное устройство 8 и далее в устройство цифровой обработки сигналов 9, где осуществляется их обработка.
По результатам приема и обработки отраженных от БПЛА радиолокационных сигналов на ФАРПО 12, определяется местоположение обнаруженного БПЛА с выводом этой информации на пульте управления 23. По результатам приема радиосигналов от каналов радиоуправления БПЛА на коллинеарную антенну 6 и направленные логопериодические антенны 7.1, 7.2, 7.3 и 7.4, анализа сигнально-помеховой обстановки и регистрации радиосигналов, путем сравнения полученных данных с информацией, записанной в модуле хранения информации 10, модуль управления 11 определяет необходимые для радиоподавления частотные диапазоны и выводит эту информацию на пульт управления 23. Если на пульте управления 23 установлен автоматический режим, то модуль управления 11 формирует управляющие сигналы на двигатель 19 для поворота корпуса 1 в горизонтальной плоскости и на двигатель 21 для поворота директорных антенн 4.1, 4.2, 4.3, 4.4, 4.5 в вертикальной плоскости на обнаруженный БПЛА. Если на пульте управления 23 установлен ручной режим управления, то пользователь с использованием отображаемой информации на экране ПЭВМ о местоположении обнаруженного БПЛА наводит на него устройство, передавая сигналы на двигатели 19 и 21 с помощью кнопок пульта управления 23, например, на клавиатуре ПЭВМ. Также на пульте управления 23 пользователь может изменить тип помехи, ее излучаемую мощность, а также в ручном режиме скорректировать радиочастоту помехового сигнала.
Модуль управления 11 в соответствии с выбранными режимами запускает соответствующие генераторные узлы 2.1,…,2.5, сигналы с которых поступают к соответствующим усилителям мощности 3.1,…,3.5, далее через фидерные устройства 35 на соответствующую директорную антенну и излучаются в пространство. Пользователь на пульте управления 23, например, на экране ПЭВМ получает отображение типа помехи, выбранной для радиоподавления выбранного радиоканала БПЛА и время работы устройства в режиме радиоподавления. После окончания радиоподавления модуль управления 11 выключает соответствующие генераторные узлы 2.1,…,2.5. Определение типа БПЛА позволяет выбрать нужный диапазон радиочастот для радиоподавления и тип помехи, а наличие пяти генераторных узлов 2.1, 2.2, 2.3 и 2.4 и соответствующих им директорных антенн 4.1, 4.2, 4.3, 4.4 и 4.5 позволяет осуществлять радиопродиводействие нескольким БПЛА или нескольким типам БПЛА, чьи каналы радиоуправления находятся диапазонах 390 -490 МГц, 850 - 960 МГц, 2200 - 2600 МГц и 4900 - 5900 МГц, а каналы геопозиционирования в диапазонах 1200 - 1260 МГц и 1570 - 1610 МГц, что в целом повышает радиопродиводействие применению БПЛА.
Работа устройства обнаружения БПЛА и радиопротиводействия их применению может осуществляться от внешней сети электропитания подключаемой через разъем 27 и аккумуляторной батареи 28 установленной в корпусе 1 устройства через крышку отсека АКБ 30.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО СОЗДАНИЯ ПРЕДНАМЕРЕННЫХ ПОМЕХ ГЛОБАЛЬНЫМ НАВИГАЦИОННЫМ СПУТНИКОВЫМ СИСТЕМАМ | 2024 |
|
RU2828474C1 |
| Пространственно-распределенная система радиопомех на беспилотных летательных аппаратах | 2023 |
|
RU2807312C1 |
| Многофункциональный комплекс средств обнаружения, сопровождения и радиопротиводействия применению беспилотных летательных аппаратов малого класса | 2020 |
|
RU2769037C2 |
| Устройство радиоэлектронного подавления беспилотных летательных аппаратов в зенитно-ракетном комплексе ближнего действия | 2023 |
|
RU2820537C1 |
| СПОСОБ И УСТРОЙСТВО СОЗДАНИЯ ПРЕДНАМЕРЕННЫХ ПОМЕХ | 2013 |
|
RU2543078C1 |
| НЕЛИНЕЙНЫЙ РАДАР ДЛЯ ДИСТАНЦИОННОГО МОНИТОРИНГА ПРОДУКТОПРОВОДОВ | 2007 |
|
RU2343499C1 |
| КОНТРОЛЬНО-ИЗМЕРИТЕЛЬНАЯ СИСТЕМА МОНИТОРИНГА | 2017 |
|
RU2662726C1 |
| СИСТЕМА РАДИОСВЯЗИ С КОНТРОЛИРУЕМЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2558330C2 |
| Мобильная аппаратная контроля безопасности связи | 2023 |
|
RU2823040C1 |
| НЕЛИНЕЙНЫЙ РАДАР ДЛЯ ОБНАРУЖЕНИЯ ПОДСЛУШИВАЮЩИХ УСТРОЙСТВ | 2007 |
|
RU2327185C1 |
Изобретение относится к области противодействия выполнению задач беспилотными летательными аппаратами (БПЛА) и может быть использовано для точного обнаружения БПЛА, в том числе осуществляющего полет в режиме радиомолчания, распознавания и дистанционного нарушения работы его каналов радиоуправления и геопозиционирования. Техническим результатом является сокращение времени обнаружения БПЛА и наведения на него для радиопротиводействия. Предложено устройство обнаружения БПЛА и радиопротиводействия их применению, включающее корпус, закрепленный на опорно-поворотном устройстве, в котором размещаются пять генераторных узлов, пять усилителей мощности, блок питания, радиоприемное устройство, устройство цифровой обработки сигналов, модуль хранения информации, модуль управления, пульт управления, распределительное устройство фазированной антенной решетки полусферического обзора (ФАРПО), передатчик ФАРПО, аналого-цифровые преобразователи, цифровое устройство пространственно-временной обработки сигнала радиолокатора, антенно-мачтовое устройство с закрепленными на нем ФАРПО и четыре направленных логопериодических антенны. 7 з.п. ф-лы, 8 ил.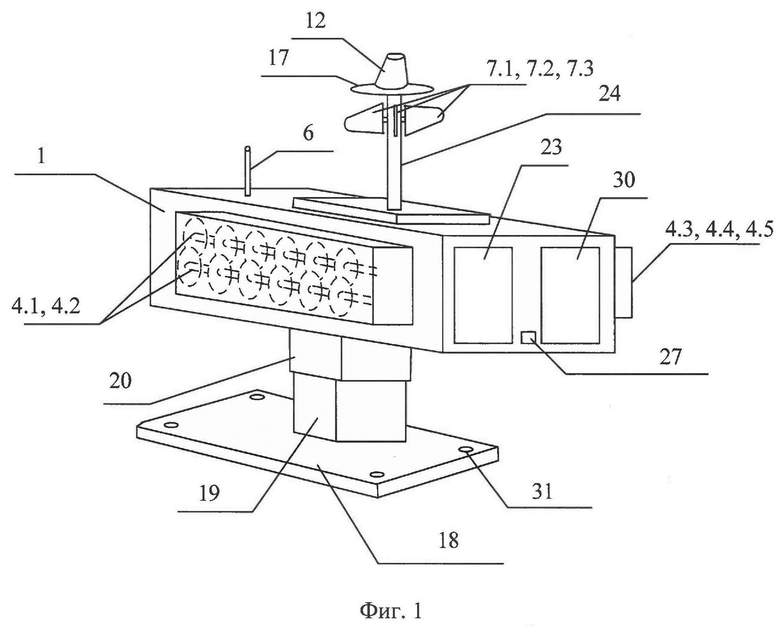
1. Устройство обнаружения беспилотных летательных аппаратов (БПЛА) и радиопротиводействия их применению, включающее корпус (1), первый (2.1), второй (2.2), третий (2.3), четвертый (2.4) и пятый (2.5) генераторные узлы, соединенные соответственно через первый (3.1), второй (3.2), третий (3.3), четвертый (3.4) и пятый (3.5) усилители мощности с соответствующей директорной антенной (4.1), (4.2), (4.3), (4.4), (4.5), блок питания (5), коллинеарную антенну (6), две направленные логопериодические антенны (7.1) и (7.2), радиоприемное устройство (8), устройство цифровой обработки сигналов (9), модуль хранения информации (10) и модуль управления (11), при этом коллинеарная антенна (6) и направленные логопериодические антенны (7.1) и (7.2) соединены с соответствующими входами радиоприемного устройства (8), выходы которого соединены с советующими входами устройства цифровой обработки сигналов (9), выход которого соединен с модулем управления (11), модуль управления (11) соединен с модулем хранения информации (10) и с генераторными узлами (2.1), (2.2), (2.3), (2.4) и (2.5), а блок питания (5) соединен со всеми электропотребляющими элементами устройства отличающееся тем, что в состав устройства дополнительно введены третья (7.3) и четвертая (7.4) направленные логопериодические антенны, соединенные с соответствующими входами радиоприемного устройства (8), фазированная антенная решетка полусферического обзора (ФАРПО) (12), распределительное устройство ФАРПО (13), передатчик ФАРПО (14), аналого-цифровые преобразователи (15.1),…,(15.N), цифровое устройство пространственно-временной обработки сигнала радиолокатора (16), электромагнитный экран (17), установленный под ФАРПО (12), опора (18) с закрепленным на ней двигателем (19), соединенным с механизмом поворота (20), на котором закреплен корпус (1), двигатель (21) соединен с механизмом поворота (22), на котором закреплены директорные антенны (4.1), (4.2), (4.3), (4.4), (4.5), пульт управления (23) соединен с модулем управления (11) и цифровым устройством пространственно-временной обработки сигнала радиолокатора (16), выходы ФАРПО (12) соединены с соответствующими входами аналого-цифровых преобразователей (15.1),…,(15.N), выходы которых соединены с модулем управления (11), передатчик ФАРПО (14) через распределительное устройство ФАРПО (13) подключен к входам ФАРПО (12), модуль управления (11) соединен с передатчиком ФАРПО (14), с цифровым устройством пространственно-временной обработки сигнала радиолокатора (16), двигателем (19) и двигателем (21), направленные логопериодические антенны (7.1), (7.2), (7.3), (7.4) и ФАРПО (12) закреплены на антенно-мачтовом устройстве (24).
2. Устройство по п. 1, отличающееся тем, что пульт управления (23) выполнен в виде дисплея с тачскрином.
3. Устройство по п. 1, отличающееся тем, что пульт управления (23) выполнен в виде персональной ЭВМ с программным обеспечением.
4. Устройство по п. 1, отличающееся тем, что пульт управления (23) выполнен, выносным на расстояние L (м) от устройства.
5. Устройство по п. 1, отличающееся тем, что механизм поворота (20) обеспечивает поворот корпуса (1) в горизонтальной плоскости на 360°.
6. Устройство по п. 1, отличающееся тем, что механизм поворота (22) обеспечивает поворот директорных антенн (4.1), (4.2), (4.3), (4.4), (4.5) в вертикальной плоскости на 180°.
7. Устройство по п. 1, отличающееся тем, что блок питания (5) включает разъем (27) для подключения к внешней сети электропитания, а также по меньшей мере одну аккумуляторную батарею (28) и преобразователь-стабилизатор питающего напряжения (29), установленные в корпусе (1) устройства.
8. Устройство по п. 1, отличающееся тем, что антенно-мачтовое устройство (24) выполнено телескопическим.
| CN 114646982 A, 21.06.2022 | |||
| CN 214544334 U, 29.10.2021 | |||
| CN 112946585 A, 11.06.2021 | |||
| CN 109018388 A, 18.12.2018 | |||
| CN 209731264 U, 03.12.2019 | |||
| МАШИНА ДЛЯ ПОСАДКИ ЛУКА Т. МЕЛИНЕВСКОГО | 1967 |
|
SU223490A1 |
| Мультисенсорный способ обнаружения беспилотных летательных аппаратов | 2021 |
|
RU2757928C1 |
| Осипов А.С., Военно-техническая подготовка | |||
| Военно-технические основы построения средств и комплексов РЭП, Красноярск, СФУ, 2013. | |||

