Изобретение относится к области автоматизации обработки рыбы и быть использовано в рыборазделочных машинах для автоматической настройки ее рабочих органов в зависимости от толщины рыбы, расположенной на транспортирующем органе перпендикулярно к движению.
Известно устройство для автоматической настройки рабочих органов рыборазделочной мащины, содержащее датчик измеряемого параметра рыбы, генератор импульсов, щаговый двигатель, связанный посредством усилителя с выходом коммутатора, конечные выключатели, элементы задержки, блок управления движением рабочего органа, конъюнкторы и преобразователь непрерывной величины во временной интервал 1.
Недостатком этого устройства является сравнительно невысокая производительность, так как рабочий орган после обработки каждого экземиляра рыбы возвращается в положение, соответствующее минимальному (или максимальному) размеру рыбы.
Цель изобретения - увеличить быстродействие и возможность настройки рабочих органов на обработку различных видов рыб.
Поставленная цель достигается тем, что предлагаемое устройство для автоматической настройки рабочих органов рыборазделочной машины снабжено компаратором,
датчиком среднего положения рабочего органа и формирователем модуля, включенным между датчиком измеряемого параметра рыбы и преобразователем непрерывной величины во временной интервал, при
этом компаратор и датчпк среднего положения рабочего органа соединены с входом блока управления движением рабочего органа, а вход компаратора связан с датчиком измеряемого параметра.
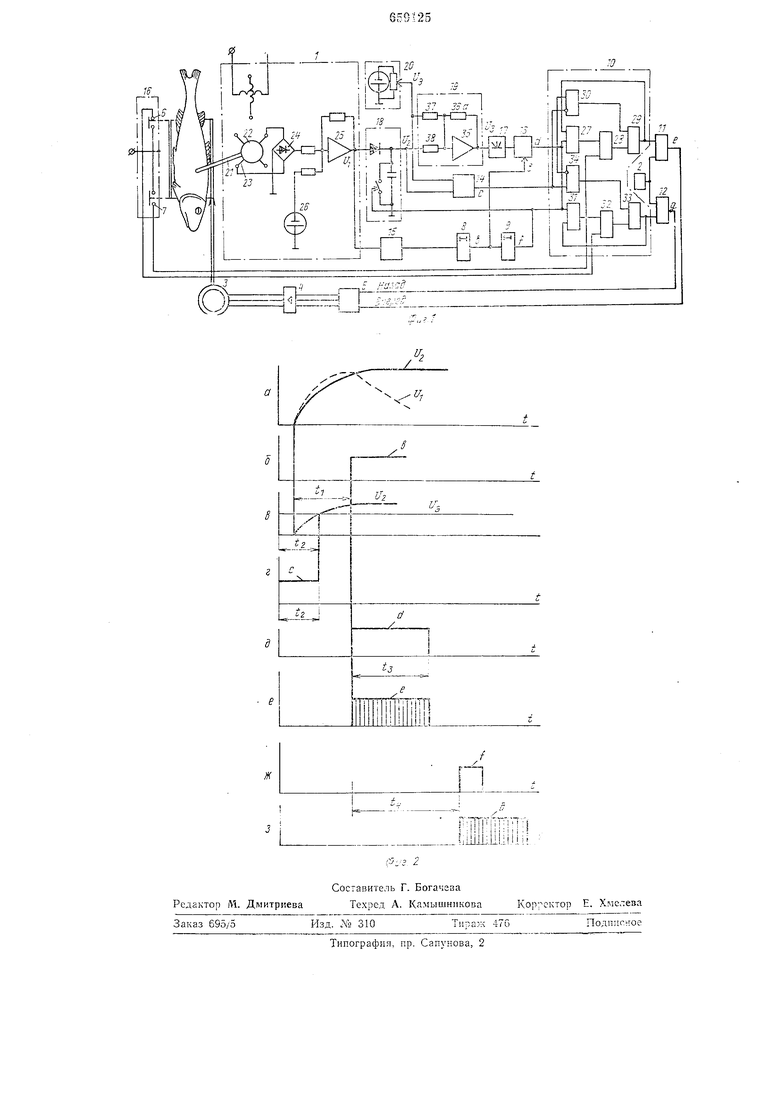
Иа фиг. 1 представлена принципиальная схема устройства; на фиг. 2 - показаны временные диаграммы напряжений и сигналов.
Устройство состоит из датчика I измеряемого параметра рыбы, генератора 2 импульсов, шагового двигателя 3, связанного посредством усилителя 4 с выходом коммутатора 5, конечных выключателей 6 и 7, элементов 8 и 9 задержки, блока 10 управления движением рабочего органа, конъюнкторов И и 12, преобразователя 13 непрерывной величины во временной интервал, компараторов 14 и 15, датчика 16 среднего положения рабочего органа и
L:
. K f ., .формирователя 17 модуля, включенного между датчиком 1 измеряемого параметра рыбы и преобразователем 13 непрерывной величины во временной интервал, при этом компаратор 14 и датчик 16 среднего положения рабочего органа соединены с входами блока 10 управления движением рабочего органа, входы компараторов 14 и 15 связаны с датчиком 1 измеряемого параметра рыбы.
Кроме того, предлагаемое устройство содержит блок 18 памяти, вычислительный блок 19, источник 20 регулируемого опорного напряжения.
Датчик 1 измеряемого параметра рыбы состоит из подпружиненного щупа 21, выполненного в виде шторки, соединенной с валом ротора 22 вращающегося трансформатора, косинусная обмотка 23 которого через диодный мост 24 включена на вход операционного усилителя 25 параллельно с источником 26 опорного напряжения.
Блок 10 управления движением рабочего органа содержит два аналогичных узла формирования команд «Вперед и «Назад.
Причем узел формирования команды «Вперед состоит из дизъюнктора 27, соединенного через конъюнктор 28 с дизъюнктиром 29, к второму входу которого подключен выход конъюнктора 30. Один вход конъюнктор а 30 соединен с выходом преобразователя 13 непрерывной величины во временной интервал, а его инверсный вход подключен к выходу компаратора 14. Выход дизъюнктора 29 связан с выходами конъюнктора 11 и дизъюнктора 27.
Узел формирования команды «Назад состоит из дизъюнктора 31, соединенного через конъюнктор 32 с дизъюнктором 33, к второму входу которого подключен выход конъюнктора 34. Один вход конъюнктора 34 подключен к преобразователю 13 непрерывной величины во временной интервал, а второй вход - к выходу компаратора 14. Выход дизъюнктора 33 связан с входами конъюнктора 12 и дизъюнктора 31. Вторые входы конъюнкторов 28 и 32 подключены к конечным выключателям 6 и 7 датчика 16 средне1;о положения рабочего органа.
Вычислительный блок 19 включает операционный усилитель 35, охваченный обратной связью с помощью резистора 36 с двумя входами через резисторы 37 и 38.
Устройство работает следующим образом.
Подлежащая обработке рыба укладывается в кассету с фиксацией ее головы в упорную планку, установленную таким образом, чтобы среднестатистическая рыба в последующем не вызывала перемещения рабочего органа.
При движении транспортирующего органа рыба подходит к датчику 1 измеряемого
659125
параметра рыбы и отклоняет подпружиненный щуп 21, который поворачивает ротор 22 вращающегося трансформатора на некоторый угол а. Величина этого угла пропорциональна толщине измеряемой рыбы. На входе косинусной обмотки 23 вращающегося трансформатора появляется напряжение, пропорциональное косинусу угла ее, которое выпрямляется и сравнивается с напряжением источника 26 опорного напряжения. Разность указанных напряжений подается на вход операционного усилителя 25, напряжение Vi на выходе которого будет пропорционально толщине измеряемой
рыбы.
Максимальное значение напряжения f/i запоминается блоком 18 памяти, напряжение и на выходе которого будет пропорционально максимальной толщине рыбы.
Временные диаграммы напряжений U и IJ-2. представлены на фиг. 2, а. Напряжение , подается также на компаратор 15, который срабатывает в самом начале измерения и через элемепт 8 задержки, равной времени
1 измерения самой большой рыбы, подает разрешающий сигнал Ъ на работу преобразователя 13 непрерывной величины во временной интервал. Временная диаграмма сигнала b показана на фиг. 2,6.
В процессе настройки устройства с помощью источника 20 регулируемого опорного напряжения устанавливают эталонное напряжение U, равное напряжению /2 при измерении средней по величине рыбы, которое подается на первый вход компаратора 14. Компаратор срабатывает и подает единичный сигнал на инверсные входы конъюнкторов 30 и 34. Однако сигнала на выходе конъюнктора 34 нет, так как с выхода преобразователя 13 непрерывной величины во временной интервал сигнал а не подается.
Предположим, что измеряемая рыба
больше, чем средняя, тогда напряжение {/а (фиг. 2, б) при времени tz становится равным напряжению V и компаратор 14 отключается, т. е. сигнал на его выходе становится равным нулю (фиг. 2,г), а отсутствие сигнала на инверсном входе конъюнктора 30 разрешает работу узла выбора направления движения в сторону «Вперед при наличии сигнала ос на выходе преобразователя 13.
Формирование сигнала а на выходе преобразователя 13 производится следующим образом.
Если, например, измеряемая рыба больше средней, то напряжение f/2 больше t/э.
С помощью резисторов 37 и 38 эти напрял :ения алгебраически суммируются и их положительная разность подается на вход операционного усилителя 35. На выходе усилителя появляется напряжение f/s, величина которого равна входному напряжению, умноженному на коэффициент усиления k операционного усилителя
U,-k(U,-U.(1)
с помощью резистора 36 регулируется величина коэффициента усиления k операционного усилителя и тем самым производится настройка вычислительного устройства на обработку данного вида рыбы, в чем нетрудно убедиться на основании следующих рассуждений.
Известно, что, например, между длиной головы у и максимальным значением ее толщины X существует линейная зависимость, описываемая уравнением регрессии
, у ах + Ь,(2)
где а VI b - постоянные коэффициенты, характеризующие вид рыбы. Очевидно, что среднее значение длины головы рыбы i/cp может быть получено по уравнению (2) путем подстановки в него средней толщины Хс, т. е.
г/ср ал:ср + Ь.(3)
Отклонение длины головы любой рыбы от средней Аг/ определяется разностью уравнения (2) и (3)
At/ г/ - Уср - а (л; - дгер).(4)
В предлагаемом устройстве среднее значение величины Хс-р устанавливается напряжением Иэ, а величина х пропорциональна t/2. Из уравнений (1) и (4) видно, что напряжение на выходе операционного усилителя пропорционально разности длины головы измеряемой рыбы и средней по величине, причем коэффициент усиления k соответствует коэффициенту а, характеризующему вид рыбы.
Так как разность напряжений Uz-t/э в общем случае может быть как положительной (при измеряемой рыбе больше средней величины), так и отрицательной (при измеряемой рыбе меньше средней величины), то для получения модуля величины, пропорциональной указанной разности напряжений на выходе вычислительного устройства включен формирователь 17 модуля, на выходе которого сигнал будет пропорционален абсолютному значению входной величины. Этот сигнал подается на вход преобразователя 13 непрерывной величины во временной интервал, на выходе которого появляется сигнал d длительностью 1з, пропорциональной абсолютной величине разности напряжений . Сигнал d подается на входы конъюнкторов 30 и 34, но так как на вторых входах этих конъюнкторов сигнал с равен нулю (при измеряемой рыбе больше средней величины), то появляется сигнал только на выходе конъюнктора 30, который через дизъюнктор 29 подается на первый вход конъюнктора 11, Так как на второй вход этого конъюнктора подключен генератор 2 импульсов, то на выходе е этого конъюнктора появляются импульсы (фиг. 2,е), которые через вход «Вперед коммутатора 5 и усилителя 4 подаются на шаговый двигатель 3, перемещающий рабочий орган в сторону «Вперед. Величина перемеи1,ения рабочего органа пропорциональна числу импульсов, поданных на шаговый двигатель, которое,
в свою очередь, зависит от частоты генератора импульсов и времени з длительности сигнала d на выходе преобразователя 13. Исчезновение сигнала d приводит к прекращению подачи импульсов на шаговый двигатель, который останавливается и фиксирует рабочий орган в полон ении, соответствующем обрабатываемому параметру измеренной рыбы.
По истечении выдержки времени 6„ обеспечиваемой элементом 9 задержки после пачала работы преобразователя 13, подается сигнал / на входы дизъюнкторов 27 и 31. Однако сигнал появляется только на выходе конъюнктора 32, так как в датчике 16
среднего положения рабочего органа замкнут конечный выключатель 6, через который подается сигнал от источника питания на второй вход конъюнктора 32. Сигнал с выхода конъюнктора 32 через дизъюнктор
33 подается на вход конъюнктора 12, и так как второй вход этого конъюнктора подключен к генератору 2 импульсов, то на его выходе g появляются импульсы, которые подаются через вход «Назад коммутатора 5 и усилитель 4 на шаговый двигатель 3, который начинает вращаться в обратном направлении, перемещая рабочий орган в исходное среднее положение. Сигнал с выхода дизъюнктора 33 подается на
вход дизъюнктора 31 для обеспечения обратной связи, позволяюи1ей получать сигнал на выходе дизъюнктора 33 при исчезновении сигнала задержки f, т. е. перемещение рабочего органа в исходное среднее положение будет производиться до тех пор, пока не разомкнется конечный выключатель 6 датчика 16 среднего положения рабочего органа. В исходном среднем положении рабочего
органа оба конечных выключателя 6 и 7 разомкнуты, во всех положениях «Вперед замкнут конечный выключатель 6, а выключатель 7 разомкнут и, наоборот, во всех положениях рабочего органа «Назад замкнут конечный выключатель 7, а конечный выключатель 6 разомкнут. Сигнал f сбрасывает сигнал с блока 18 памяти, и схема приходит в исходное состояние. Если измеряемая рыба меиьию средней,
то в этом случае эталонное напряжение 6я больше напрял ения f/o, компаратор 14 остается включенным в течение всего цикла, и сигнал с на его выходе равен единице. Наличие единичного сигнала на инверсном входе конъюнктора 30 запрещает появ-.
ление сигнала на его выходе. Так как сигнал с подается также на вход конъюнктора 34, то при наличии на его втором входе единичного сигнала а с выхода преобразователя 13, на его выходе появляется сигнал, который через дизъюнктор 33 подается на вход конъюнктора 12. Так как второй вход этого конъюнктора подключен к генератору 2 импульсов, то на его выходе появляются импульсы, число которых определяется частотой генератора 2 импульсов и длительностью сигнала d, снимаемого с выхода преобразователя 13 непрерывной величины во временной интервал. Указанные импульсы через вход «Назад коммутатора 5 и усилитель 4 подаются на шаговый двигатель 3, ротор которого поворачивается на угол, пропорциональный числу импульсов поданного напряжения, и перемещает рабочий орган в направлении «Назад. Движение «Назад продолжается дотех пор, пока не исчезнет сигнал d на выходе преобразователя 13, длительность которого пропорциональна абсолютному значению разности толщины измеряемой и средней по величине рыбы.
Перемещение рабочего органа в исходное среднее положение производится с помощью сигнала f, снимаемого с выхода элемента 9 задержки, который через дизъюнктор 27, конъюнктор 28 и дизъюнктор 29 подается на вход конъюнктора 11. На выходе е конъюнктора 11 появляются импульсы, которые через вход «Вперед коммутатора 5 и усилитель 4 подаются на шаговый двигатель 3. Последний возвращает рабочий орган в исходное среднее положение, в котором размыкаются контакты конечных выключателей 6 и 7, причем в данном случае выключатель 7 снимает сигнал с входа конъюнктора 28 и подача импульсов на шаговый двигатель 3 прекращается.
Увеличение быстродействия рабочего органа в предлагаемом устройстве по сравнению с прототипом достигается за счет возвращения рабочего органа в исходное положение, соответствующее настраиваемому параметру среднестатистической рыбы, т. е. при измерении и обработке среднестатистической рыбы рабочий орган не перемещается.
Известно, что распределение рыб разной величины в уловах подчиняется нормальному закону. Суммарный путь 5ы, проходимый рабочим органом во время настроечных операций при обработке одной пыборки рыб, если рабочий орган возвращается после обработки каждого экземпляра в положение, соответствующее минимальной или максимальной рыбе, определяется выражением
5„ 22 /-«/.(5)
.
где li - путь, проходимый рабочим органом при обработке рыб одинаковой толщины для заданного г-го интервала толщины;
/п,- - плотность относительной частоты (плотность вероятности, приходящаяся на принятый интервал); п - число интервалов в выборке. При возвраще 1ии рабочего органа после каждой операции в положение, соответствующее обрабатываемому параметру среднестатистической рыбы полный путь Sen, проходимый рабочим органом во время насгроечных операций при обработке одной выборки, определяется выражением
я/2
(4р-/,).(6)
(1
Анализ гистограмм нескольких выборок, например, минтая, по формулам (5) и (6)
показывает, что при использовании среднего положения в качестве исходного общий настроечный путь рабочего органа 5ср меньше 5м примерно в 2,3-2,6 раза, что при одинаковых скоростях перемещения рабочего органа обеспечит сокращение общего времени настроечных операций и тем самым увеличит производительность рыборазделочной машины.
Возможность использования устройства
для обработки различных видов рыб обеспечивается быстрой установкой коэффициента а, уравнения регрессии нового вида рыбы с помощью рс-з стора 36, средпей толпхины лср нового вида рыбы с помощью эталонного напряжения f/n.
Формула изобретения
Устройство для автоматической настройки рабочих органов рыборазделочмой машины, содержащее датчик измеряемого параметра рыбы, генератор импульсов, шаговый двигатель, связанный посредством усилителя с выходом коммутатора, конечные выключатели, элементы задержки, блок
управления движением рабочего органа, конъюнкторы и преобразователь непрерывной величины во временной интервал, отличающееся тем, что, с целью увеличения быстродействия и возможности настройки рабочих органов на обработку различных видов рыб, оно снабжено компаратором, датчиком среднего положения рабочего органа и формирователем модуля, включенным между датчиком измеряемого
параметра рыбы и преобразователе непрерывной величины во временной интервал, :ри этом компаратор п датчик среднего положения рабочего органа соединены с входом блока управления движе-гием рабочего-органа; а вход компаратора связан с датчиком измеряемого параметра.
- Источники информации, принятые во внимание при экспертизе. 1. Авторское свидетельство СССР
ДСо 556769, кл. А 22С 25/14, 28.05,75.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления рабочими органами рыборазделочной машины | 1978 |
|
SU736932A1 |
| Устройство для управления рабо-чиМи ОРгАНАМи РыбООбРАбАТыВАющЕйМАшиНы | 1979 |
|
SU835401A1 |
| Устройство для настройки рабочего органа однооперационной рыборазделочной машины | 1974 |
|
SU613748A1 |
| Устройство для настройки рабочих органов рыборазделочной машины | 1976 |
|
SU682207A1 |
| Устройство для настройки рабочих органов однооперационной рыборазделочной машины | 1974 |
|
SU538702A1 |
| Рыборазделочная машина | 1973 |
|
SU506368A1 |
| Устройство для автоматической настройки рабочего органа рыборазделочной машины | 1980 |
|
SU921493A1 |
| Устройство для настройки рабочего органа рыборазделочной машины | 1974 |
|
SU611600A1 |
| Устройство для настройки рабочих органов рыборазделочной машины | 1978 |
|
SU740213A1 |
| Устройство для автоматической настройки рабочих органов рыборазделочной машины | 1975 |
|
SU556769A1 |
- T-U
