Изобретение относится к области радиотехники, в частности к средствам имитации источников радиоизлучений (ИРИ), в том числе ИРИ на беспилотных летательных аппаратах (БпЛА) и может быть использовано при оценке показателей качества средств радиопеленгования и систем местоопределения ИРИ на БпЛА, а также для обучения операторов указанных средств.
Известен имитатор радиосигналов [патент РФ № 149476, G01S 7/40, 2015], позволяющий имитировать радиосигналы с заданной начальной фазой, различного вида и параметрами.
Недостатком указанного устройства является низкая технологичность и сложность имитации пространственно-разнесенных ИРИ.
Наиболее близким по технической сущности и достигаемому техническому результату (прототип) является устройство - имитатор пространственно-разнесенных ИРИ [патент РФ № 2627689, G01S 7/02, 2017], позволяющий формировать сигналы ИРИ с заданными значениями пеленгов на них для системы из двух разнесенных в пространстве радиопеленгаторов, содержащий генератор синхросигналов и последовательно соединенные устройство управления (УУ), первое запоминающее устройство (ЗУ) и накапливающий сумматор, N-каналов формирования сигналов, каждый из которых содержит последовательно соединенные четвертое ЗУ, фазосдвигающее устройство и устройство формирования сигнала, при этом вторые входы фазосдвигающих устройств всех каналов объединены и соединены с выходом накапливающего сумматора, второе ЗУ и третье ЗУ, при этом их первые входы объединены и соединены с третьим выходом УУ, а вторые входы объединены со вторым входом первого ЗУ и соединены со вторым выходом УУ, при этом второе ЗУ имеет j - выходов, а третье ЗУ имеет (N-j)-выходов таким образом, что с первого по j - й выход второе ЗУ соединено с соответствующими первыми входами четвертых ЗУ с первого по j - й канал формирования сигналов (j<N), а с j+1 по N-й выход третье ЗУ соединено с соответствующими первыми входами четвертых ЗУ с j+1 по N-й канал формирования сигналов, при этом выходы устройств формирования сигнала являются выходами имитатора пространственно-разнесенных ИРИ. Устройство управления содержит последовательно соединенные устройство задания кода режима работы, ЗУ хранения значений координат и индикатор, при этом вход ЗУ хранения частоты соединен с объединенным первым выходом устройства задания кода режима работы, второй выход которого является вторым выходом устройства управления, а объединенный выход ЗУ хранения частоты является первым выходом устройства управления, при этом второй вход индикатора соединен с объединенным выходом ЗУ хранения частоты, а блок расчета значений пеленгов, выход которого является третьим выходом устройства управления, соединен своим входом с объединенным выходом ЗУ хранения значений координат.
Недостатком устройства прототипа является отсутствие функциональной возможности формирования для системы из двух пространственно-разнесенных радиопеленгаторов сигналов ИРИ на БпЛА с заданными значениями и пеленгов, и углов места, определяющих пространственное положение ИРИ.
Техническим результатом изобретения является имитация работы ИРИ на БпЛА с заданного местоположения в трехмерном пространстве за счет вычисления по заданным координатам двух значений пеленгов и двух значений углов места и одновременного формирования двух групп (1, …, J) и (J+1, …, J+N) сигналов с различными фазовыми сдвигами в каждой группе относительно фазы сигнала одного из каналов для группы (1, …, J) сигналов и относительно фазы сигнала одного из каналов для группы (J+1, …, J+N) сигналов, учитывающих соответствующие значения пеленгов и углов места.
Технический результат достигается тем, что в известный имитатор пространственно-разнесенных ИРИ, дополнительно в УУ введен блок расчета значений углов места, вход которого соединен с выходом ЗУ хранения значений координат ИРИ, а выход блока расчета значений углов места, является четвертым выходом УУ, а в имитатор источников радиоизлучения дополнительно введены пятое ЗУ и шестое ЗУ, вторые входы которых соединены со вторым выходом УУ, а первые входы соединены с четвертым выходом УУ, пятое ЗУ имеет J выходов, а шестое ЗУ имеет N выходов, которые с первого по J-й выход пятого ЗУ соединено с соответствующими третьими входами J-х четвертых ЗУ, а с первого по N-й выход шестого ЗУ соединено с соответствующими третьими входами J+N-х четвертых ЗУ.
Известно [И.С. Кукес, М.Е. Старик. Основы радиопеленгации. - М.: Советское радио, 1964 г, 324 с., с. 33-35], что при фазовом пеленговании пространственно-разнесенных ИРИ из-за разности хода лучей сигналы на входе пеленгатора имеют различные фазовые сдвиги относительно фазы одного из сигналов, являющегося опорным. Также известно [А.И. Куприянов, А.В. Сахаров. Теоретические основы радиоэлектронной борьбы: Учебное пособие. - М.: Вузовская книга, 2007. - 356 с., с. 37-41], что при триангуляционном методе определение местоположения ИРИ в пространстве осуществляется по результатам определения координат точки пересечения линий пеленгов на ИРИ от двух радиопеленгаторов, разнесенных в пространстве, и имеющих известные координаты. Поэтому, если формировать две группы (1, …, J) и (J+1, …, J+N) сигналов с различными фазовыми сдвигами в каждой группе относительно фазы сигнала одного опорного канала в группе (1, …, J) сигналов и относительно фазы сигнала одного опорного канала в группе (J+1, …, J+N) сигналов, то будет осуществляться имитация работы ИРИ с заданного местоположения в пространстве. Фазовый сдвиг сигнала в каждом канале определяется [И.С. Кукес, М.Е. Старик. Основы радиопеленгации. - М.: Советское радио, 1964 г, 324 с., с. 33-35] заданной геометрией пеленгаторной антенной системы (количество антенных элементов и расстояние между ними) и заданными координатами ИРИ. Это позволяет при подключении к выходу имитатора двух фазовых пеленгаторов, осуществляющих измерение пеленга и угла места на основе оценки разности фаз в сигналах (фазовым методом) [И.С. Кукес, М.Е. Старик. Основы радиопеленгации. - М.: Советское радио, 1964 г, 324 с., с. 33-35], проходящих по их каналам, получить на выходе каждого пеленгатора заданное значение пеленга и угла места на ИРИ на определенной частоте излучения и триангуляционным методом определить его координаты.
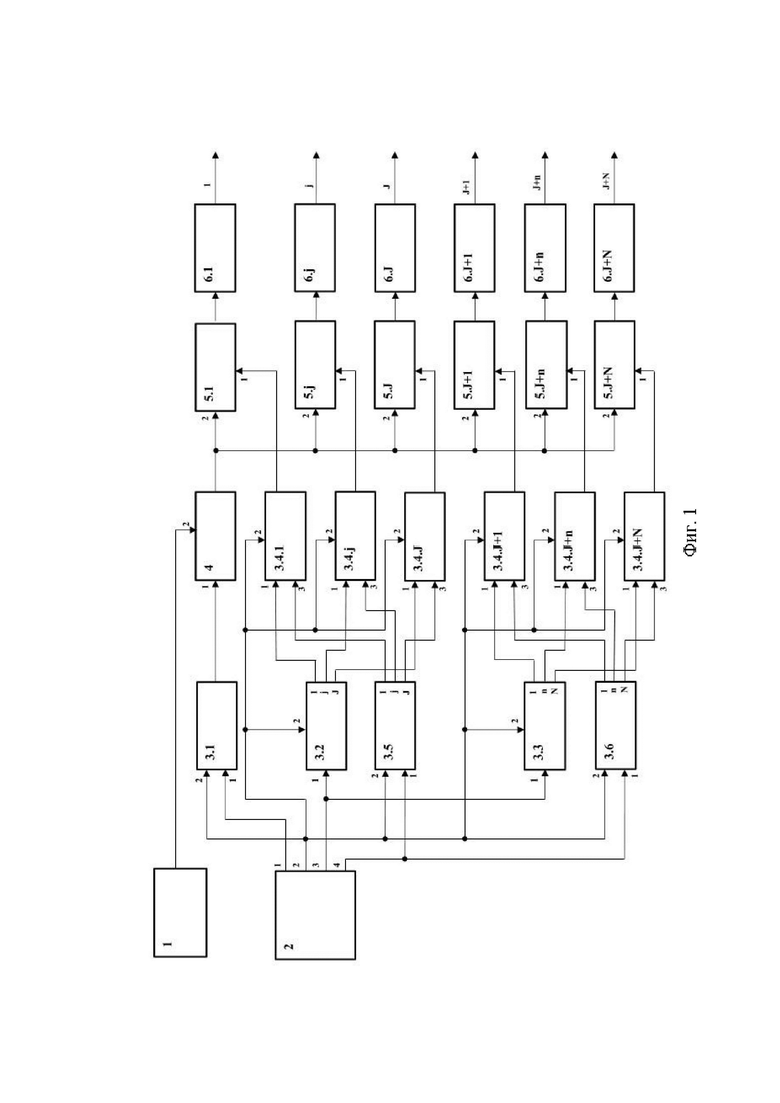
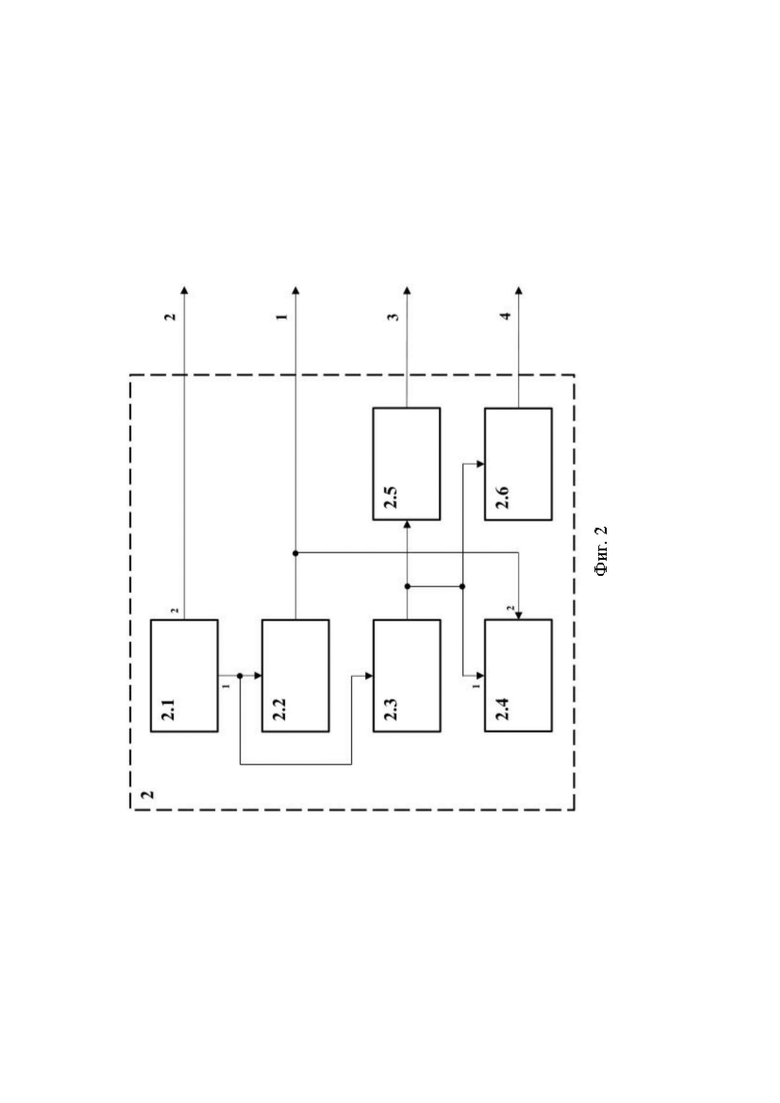
На фиг. 1 представлена функциональная схема имитатора ИРИ, где введены следующие обозначения, на фиг. 2 представлена функциональная схема УУ 2.
Имитатор источников радиоизлучений состоит из генератора синхросигналов 1, УУ 2, первого ЗУ 3.1, второго ЗУ 3.2, третьего ЗУ 3.3, J+N-х четвертых ЗУ 3.4.j и 3.4.J+n, пятого ЗУ 3.5, шестого ЗУ 3.6, накапливающего сумматора 4, J+N-х фазосдвигающих устройств 5.j и 5.J+n, J+Nох устройств формирования сигнала 6.j и 6.J+n.
Устройство управления 2 состоит из устройства задания кода режима работы 2.1, ЗУ хранения значения частоты 2.2, ЗУ хранения значения значений координат ИРИ 2.3, индикатора 2.4, блока расчета значений пеленгов 2.5, блока расчета углов мента 2.6, при этом при этом первый выход устройства задания кода режима работы 2.1 соединен с входами ЗУ хранения значений частоты 2.2 и ЗУ хранения значений координат ИРИ 2.3, выход ЗУ хранения значений частоты 2.2 является первым выходом УУ 2 и соединен также со вторым входом индикатора 2.4, второй выход устройства задания кода режима работы 2.1 является вторым выходом УУ 2, выход ЗУ хранения значений координат ИРИ 2.3 соединен с первым входом индикатора 2.4, со входом блока расчета значений пеленгов 2.5, выход которого является третьим выходом УУ 2, и с входом блока расчета значений углов места 2.6, выход которого является четвертым выходом УУ 2.
Имитатор источников радиоизлучений имеет следующие соединения элементов между собой.
Второй выход УУ 2 соединен со вторыми входами первого ЗУ 3.1, второго ЗУ 3.2, третьего ЗУ 3.3, пятого ЗУ 3.5, шестого ЗУ 3.6, J+N-х четвертых ЗУ 3.4.j и 3.4.J+n. Третий выход УУ 2 соединен с первыми входами второго ЗУ 3.2 и третьего ЗУ 3.3. Первый выход УУ 2 соединен первым входом первого ЗУ 3.1, выход которого соединен с первым входом накапливающего сумматора 4, выход которого соединен со вторыми входами J+N-х фазовращающих устройств 5.j и 5.J+n, выход каждого соединен с соответствующим входом J+N-го устройства формирования сигнала 6.j и 6.J+n, выходы которых являются выходами имитатора пространственно-разнесенных ИРИ. J-й выход второго ЗУ 3.2 соединен с первым входом J-го четвертого ЗУ 3.4.j, выход которых соединен с соответствующим первым входом фазовращающего устройства 5.j. J-й выход пятого ЗУ 3.5 соединен с третьим входом J-го четвертого ЗУ 3.4.j. J+N-й выход третьего ЗУ 3.3 соединен с первым входом J+N-го четвертого ЗУ 3.4.J+n, выход которых соединен с соответствующим первым входом фазовращающего устройства 5.J+n. J+N-й выход шестого ЗУ 3.6 соединен с третьим входом J+N-го четвертого ЗУ 3.4.J+n.
Устройство управления 2 предназначено для выбора режима работы и соответствующих ему параметров ИРИ и формируемого сигнала (центральная частота и начальная фаза, координаты ИРИ и соответствующие им пеленги и углы места на ИРИ, соответствующие заданным пеленгам и углам места значения фазовых сдвигов в сигналах для каждого канала); передачи кодов частоты, пеленгов и углов места в первое ЗУ 3.1, второе ЗУ 3.2 и третье ЗУ 3.3, а также в пятое ЗУ 3.5 и шестое ЗУ 3.6 соответственно и команд на считывание этих кодов в четвертых ЗУ 3.4.j и 3.4.J+n, накапливающий сумматор 4, а также на считывание значений фазовых сдвигов в фазосдвигающие устройства 5.j и 5.J+n, соответственно.
ЗУ хранения значения частоты 2.2 предназначено для хранения кода значения частоты, формируемого в имитаторе ИРИ сигнала и его начальной фазы.
ЗУ хранения значений координат ИРИ 2.3 предназначено для хранения кодов значений прямоугольных координат ИРИ.
Блок расчета значений пеленгов 2.5 предназначен для алгоритмического вычисления в соответствии с заданным алгоритмом (см. ниже) значений пеленгов в соответствии с заданными координатами ИРИ и геометрией радиопеленгаторной сети (известных координат радиопеленгаторов и расстояния между ними).
Блок расчета значений углов места 2.6 предназначен для алгоритмического вычисления в соответствии с заданным алгоритмом (см. ниже) значений углов места в соответствии с заданными координатами ИРИ и геометрией радиопеленгаторной сети (известных координат радиопеленгаторов и расстояния между ними).
ЗУ хранения значения частоты 2.2, ЗУ хранения значений координат ИРИ 2.3, блок расчета значений пеленгов 2.4 и блок расчета значений углов места 2.6 могут быть реализованы на основе микроконтроллера, например ATmega64A (http:// www.platan.ru/cgi-bin/qwery.pl/id=308267465).
Устройство задания кода режима работы 2.1 предназначено для передачи в ЗУ хранения значения частоты 2.2 и ЗУ хранения значений координат ИРИ 2.3 кода режима работы и информации о соответствующих ему частоте формируемого радиосигнала и координатах его источника, а также для передачи в первое ЗУ 3.1, второе ЗУ 3.2, третье ЗУ 3.3, пятое ЗУ 3.5 и шестое ЗУ 3.6 соответственно команд на считывание этих кодов в четвертые ЗУ 3.4.j и 3.4.J+n, накапливающий сумматор 4, а также на считывание значений фазовых сдвигов в фазосдвигающие устройства 5.j и 5.J+n, соответственно.
Устройство задания кода режима работы 2.1 может быть реализовано на основе механического инкрементного энкодера серии PEC 12R фирмы BOURNS (http://www. https://www.chipdip.ru/product/pec12r-4220f-s0024).
Второе ЗУ 3.2 и третье ЗУ 3.3 предназначены для буферного (оперативного) хранения кодов значений первого и второго пеленгов соответственно на ИРИ в соответствии с заданными координатами ИРИ и алгоритмического расчета, вносимых в формируемый сигнал фазовых сдвигов для двух групп 1, …, J и J+1, …, J+N каналов, в соответствии с заданными значениями пеленгов.
Пятое ЗУ 3.5 и шестое ЗУ 3.6 предназначены для буферного (оперативного) хранения кодов значений первого и второго углов места соответственно на ИРИ в соответствии с заданными координатами ИРИ и алгоритмического вычисления значений косинуса первого и второго углов места для двух групп 1, …, J и J+1, …, J+N каналов.
Четвертые ЗУ 3.4.j и 3.4.J+n предназначены для буферного (оперативного) хранения кодов, вносимых в формируемый сигнал фазовых сдвигов в соответствии с заданными значениями пеленгов на ИРИ с выходов второго 3.2 и третьего 3.3 ЗУ и алгоритмического расчета поправки для вносимых в формируемый сигнал фазовых сдвигов, в соответствии с заданными значениями углов места.
Фазосдвигающее устройство 5.j и 5.J+n предназначено для алгоритмического суммирования значений начальной фазы сигнала в каждом канале и дополнительного фазового сдвига, тем самым, осуществляя поворот фазы сигнала в соответствии с заданным в УУ 2 значениями пеленгов и углов места на ИРИ.
Второе ЗУ 3.2, третье ЗУ 3.3, пятое ЗУ 3.5 и шестое ЗУ 3.6 могут быть реализованы на основе микроконтроллера, например ATmega64A (http:// www.platan.ru/cgi-bin/qwery.pl/id=308267465).
Первое ЗУ 3.1, четвертые ЗУ 3.4.j и 3.4.J+n, накапливающий сумматор 4, фазосдвигающие устройства 5.j и 5.J+n, устройства формирования сигнала 6.j и 6.J+n. могут быть выполнены в виде синтезатора частот прямого цифрового синтеза, например AD9959 (http://www. https://www.radioradar.net/news/electronics_news/2005-10-26_08-29-27.html).
Генератор синхросигналов 1 может быть реализован на основе генератора, например KXO-V97 (https://www.chipdip.ru/product/geyer-25.0).
Индикатор 2.4 предназначен для отображения частоты формируемого сигнала и координат его ИРИ, и может быть выполнен на основе LCD индикатора WH1602B (http://www. http://freeduino.ru/arduino/LCD.html ).
Имитатор ИРИ работает аналогично устройству прототипу, за некоторым исключением.
С выхода генератора синхросигналов 1 синхросигнал опорной частоты  поступает на второй вход накапливающего сумматора 4. С первого выхода УУ 2 на первом такте работы на первый вход первого ЗУ 3.1 поступают коды значения частоты
поступает на второй вход накапливающего сумматора 4. С первого выхода УУ 2 на первом такте работы на первый вход первого ЗУ 3.1 поступают коды значения частоты  формируемого сигнала и его начальной фазы
формируемого сигнала и его начальной фазы  и записываются в нем. Одновременно с этим с третьего выхода УУ 2 одновременно на первые входы второго ЗУ 3.2 и третьего ЗУ 3.3 поступают коды значений пеленгов
и записываются в нем. Одновременно с этим с третьего выхода УУ 2 одновременно на первые входы второго ЗУ 3.2 и третьего ЗУ 3.3 поступают коды значений пеленгов  и
и  , соответствующих заданным координатам ИРИ (
, соответствующих заданным координатам ИРИ ( ) и геометрии пеленгаторной сети, а с четвертого выхода УУ 2 одновременно на первые входы пятого ЗУ 3.5 и шестого ЗУ 3.6 поступают коды значений углов места
) и геометрии пеленгаторной сети, а с четвертого выхода УУ 2 одновременно на первые входы пятого ЗУ 3.5 и шестого ЗУ 3.6 поступают коды значений углов места  и
и  , также соответствующих заданным координатам ИРИ () и геометрии радиопеленгаторной сети, и записываются в них. После записи кода значения частоты сигнала, его начальной фазы , кодов значений пеленгов , и углов места , со второго выхода УУ 2 одновременно на объединенные вторые входы второго ЗУ 3.2 и третьего ЗУ 3.3 поступает команда на расчет значений фазовых сдвигов
, также соответствующих заданным координатам ИРИ () и геометрии радиопеленгаторной сети, и записываются в них. После записи кода значения частоты сигнала, его начальной фазы , кодов значений пеленгов , и углов места , со второго выхода УУ 2 одновременно на объединенные вторые входы второго ЗУ 3.2 и третьего ЗУ 3.3 поступает команда на расчет значений фазовых сдвигов  для заданных пеленгов и (азимутов) на ИРИ и геометрии пеленгаторных антенных решеток, а по этой же команде, поступающей на объединенные вторые входы пятого ЗУ 3.5 и шестого ЗУ 3.6 производится расчет значений функции косинуса
для заданных пеленгов и (азимутов) на ИРИ и геометрии пеленгаторных антенных решеток, а по этой же команде, поступающей на объединенные вторые входы пятого ЗУ 3.5 и шестого ЗУ 3.6 производится расчет значений функции косинуса  ,
,  для заданных углов места и . После этого на объединенные второй вход первого ЗУ 3.1 и второй вход четвертых ЗУ 3.4.j и 3.4.J+n каждого канала формирования сигнала с заданной фазой со второго выхода устройства управления 2 поступает команда на запись кодов значений фазовых сдвигов
для заданных углов места и . После этого на объединенные второй вход первого ЗУ 3.1 и второй вход четвертых ЗУ 3.4.j и 3.4.J+n каждого канала формирования сигнала с заданной фазой со второго выхода устройства управления 2 поступает команда на запись кодов значений фазовых сдвигов  и функций косинуса углов места , в четвертые ЗУ 3.4.j и 3.4.J+n после чего в четвертом ЗУ 3.4.j и 3.4.J+n каждого канала формирования сигнала осуществляется перемножение значений фазовых сдвигов и функций косинуса углов места , . После этого со второго выхода устройства управления 2 на объединенные второй вход первого ЗУ 3.1 и вторые входы четвертых ЗУ 3.4.j и 3.4.J+n каждого канала формирования сигнала с заданной фазой поступает команда на одновременное считывание кода значения частоты сигнала, его начальной фазы и записи его в накапливающий сумматор 4, а также считывание кодов значений фазовых сдвигов
и функций косинуса углов места , в четвертые ЗУ 3.4.j и 3.4.J+n после чего в четвертом ЗУ 3.4.j и 3.4.J+n каждого канала формирования сигнала осуществляется перемножение значений фазовых сдвигов и функций косинуса углов места , . После этого со второго выхода устройства управления 2 на объединенные второй вход первого ЗУ 3.1 и вторые входы четвертых ЗУ 3.4.j и 3.4.J+n каждого канала формирования сигнала с заданной фазой поступает команда на одновременное считывание кода значения частоты сигнала, его начальной фазы и записи его в накапливающий сумматор 4, а также считывание кодов значений фазовых сдвигов  с учетом поправки на углы места и , и записи их в фазосдвигающее устройство 5.j и 5.J+n, соответственно.
с учетом поправки на углы места и , и записи их в фазосдвигающее устройство 5.j и 5.J+n, соответственно.
В этом случае выходной код накапливающего сумматора 4 представляют собой код полной фазы сигнала  , который поступает одновременно на вторые входы фазосдвигающих устройств 5.j и 5.J+n всех каналов формирования сигнала с заданной фазой. В фазосдвигающем устройстве 5.j и 5.J+n осуществляется алгоритмическое сложение значения полной фазы сигнала
, который поступает одновременно на вторые входы фазосдвигающих устройств 5.j и 5.J+n всех каналов формирования сигнала с заданной фазой. В фазосдвигающем устройстве 5.j и 5.J+n осуществляется алгоритмическое сложение значения полной фазы сигнала  и заданных фазовых сдвигов
и заданных фазовых сдвигов  . При этом в первом канале дополнительный фазовый сдвиг не вносится
. При этом в первом канале дополнительный фазовый сдвиг не вносится  , т.к. он является опорным. Следовательно, на выходах фазосдвигающих устройств 5.j и 5.J+n всех каналов формирования сигнала с заданной фазой имитатора ИРИ формируются коды мгновенной фазы
, т.к. он является опорным. Следовательно, на выходах фазосдвигающих устройств 5.j и 5.J+n всех каналов формирования сигнала с заданной фазой имитатора ИРИ формируются коды мгновенной фазы  сигнала с учетом соответствующих вносимых фазовых сдвигов
сигнала с учетом соответствующих вносимых фазовых сдвигов  , определяемых заданным азимутом (пеленгом)
, определяемых заданным азимутом (пеленгом)  и углом места
и углом места  на ИРИ и геометрией имитируемой пеленгаторной антенной решетки. При этом взаимосвязь частоты генерируемого колебания
на ИРИ и геометрией имитируемой пеленгаторной антенной решетки. При этом взаимосвязь частоты генерируемого колебания  и мгновенного значения фазы
и мгновенного значения фазы  , определяется следующим выражением
, определяется следующим выражением  , где
, где  ,
,  - разрядность накапливающего сумматора 4.
- разрядность накапливающего сумматора 4.
После этого процесс формирования сигнала осуществляется аналогично устройству прототипу.
Устройство управления 2 работает аналогично прототипу за некоторым исключением. С выхода ЗУ хранения значений координат ИРИ 2.3 код координат ИРИ ( ) поступает одновременно на входы блока расчета значений пеленгов 2.5 и блока расчета значений углов места 2.6 в которых осуществляется алгоритмический расчет значений пеленгов и соответственно углов места на ИРИ с каждого из радиопеленгаторов в соответствии с заданными координатами ИРИ и геометрией радиопеленгаторной сети (известных координат радиопеленгаторов и расстояния между ними), а также первый вход индикатора 2.4.
) поступает одновременно на входы блока расчета значений пеленгов 2.5 и блока расчета значений углов места 2.6 в которых осуществляется алгоритмический расчет значений пеленгов и соответственно углов места на ИРИ с каждого из радиопеленгаторов в соответствии с заданными координатами ИРИ и геометрией радиопеленгаторной сети (известных координат радиопеленгаторов и расстояния между ними), а также первый вход индикатора 2.4.
Для модели трехэлементной эквидистантой пеленгаторной антенной решетки расчет заданных фазовых сдвигов осуществляется в соответствии со следующими выражениями:
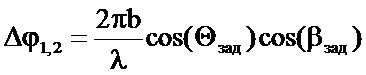 , (1)
, (1)
 , (2)
, (2)
где  - расстояние между антенными элементами имитируемой трехэлементной антенной решетки;
- расстояние между антенными элементами имитируемой трехэлементной антенной решетки;  - длина волны сигнала ИРИ;
- длина волны сигнала ИРИ;  - скорость света.
- скорость света.
| название | год | авторы | номер документа |
|---|---|---|---|
| Имитатор пространственно-разнесенных источников радиоизлучения | 2016 |
|
RU2627689C1 |
| ИМИТАТОР ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2015 |
|
RU2591045C1 |
| ИМИТАТОР ПРОСТРАНСТВЕННО-РАЗНЕСЕННЫХ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ | 2021 |
|
RU2781853C1 |
| УСТРОЙСТВО ИМИТАЦИИ РАДИОЭЛЕКТРОННОЙ ОБСТАНОВКИ | 2018 |
|
RU2687270C1 |
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ МЕСТНОСТИ | 1988 |
|
SU1841035A1 |
| Обнаружитель сигналов управления беспилотного летательного аппарата с акустическим каналом пеленгования | 2024 |
|
RU2836857C1 |
| Устройство обработки информации комплексной измерительной системы | 1990 |
|
SU1837283A1 |
| Радиопеленгатор с компенсацией помех | 2024 |
|
RU2825420C1 |
| ФАЗОВЫЙ ПЕЛЕНГАТОР | 2012 |
|
RU2519593C2 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2283505C1 |
Изобретение относится к области радиотехники, в частности к средствам имитации источников радиоизлучений (ИРИ), в том числе ИРИ на беспилотных летательных аппаратах, и может быть использовано при оценке показателей качества средств радиопеленгования и систем местоопределения ИРИ на беспилотных летательных аппаратах, а также для обучения операторов указанных средств. Техническим результатом изобретения является имитация работы источников радиоизлучений на беспилотных летательных аппаратах с заданного местоположения в трехмерном пространстве за счет вычисления по заданным координатам двух значений пеленгов и двух значений углов места и одновременного формирования двух групп (1, …, J) и (J+1, …, J+N) сигналов с различными фазовыми сдвигами в каждой группе относительно фазы сигнала одного из каналов для группы (1, …, J) сигналов и относительно фазы сигнала одного из каналов для группы (J+1, …, J+N) сигналов, учитывающих соответствующие значения пеленгов и углов места. В имитаторе источников радиоизлучения дополнительно осуществляется внесение в формируемые фазовые сдвиги в каналах формирования сигнала информации об углах места путем умножения значений фазовых сдвигов, учитывающих значения пеленгов на величину косинуса от угла места в соответствии с фазовыми уравнениями пеленгационных пар. 2 ил.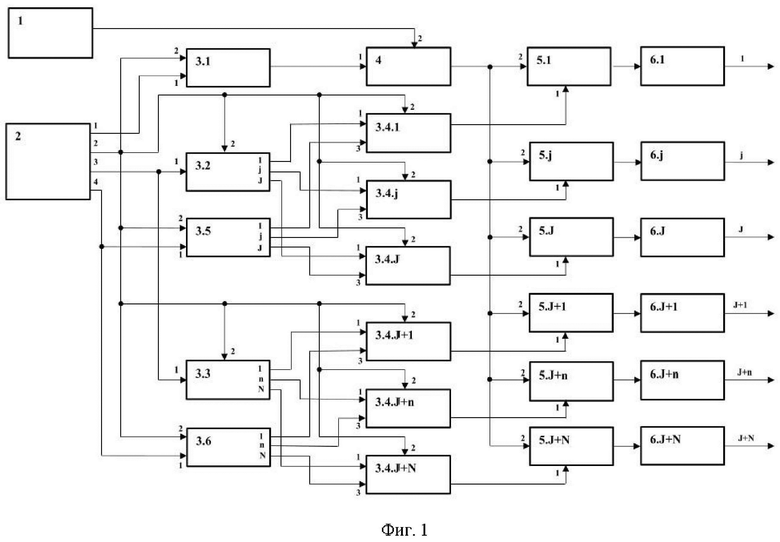
Имитатор источников радиоизлучений (ИРИ), содержащий генератор синхросигналов, устройство управления (УУ), первое запоминающее устройство (ЗУ), второе ЗУ имеющее J-выходов, третье ЗУ, имеющее N-выходов, J+N четвертых ЗУ и накапливающий сумматор, на второй вход которого поступает синхросигнал с выхода генератора синхросигналов, J+N-х фазосдвигающих устройств и J+N-х устройств формирования сигнала, при этом УУ состоит из устройства задания кода режима работы, ЗУ хранения значения частоты, ЗУ хранения значений координат ИРИ, индикатора и блока расчета значений пеленгов и третьим выходом соединено с первыми входами второго ЗУ и третьего ЗУ, при этом первый выход устройства задания кода режима работы соединен с входами ЗУ хранения значений частоты и ЗУ хранения значений координат ИРИ, выход ЗУ хранения значений частоты соединен со вторым входом индикатора и является первым выходом УУ, второй выход устройства задания кода режима работы является вторым выходом УУ, выход ЗУ хранения значений координат ИРИ соединен с первым входом индикатора и с входом блока расчета значений пеленгов, выход которого является третьим выходом УУ, где первый выход УУ соединен с первых входом первого ЗУ, выход которого соединен с первым входом накапливающего сумматора, выход которого соединен со вторыми входами J+N-ми фазосдвигающими устройствами, выход которых соединен с соответствующими входами J+N-х устройств формирования сигнала, выходы которых являются выходами устройства, второй выход УУ соединен со вторыми входами первого ЗУ, второго ЗУ, третьего ЗУ, J+N-ми четвертыми ЗУ, выходы J-х четвертых ЗУ соединены с соответствующими первыми входами J-х фазосдвигающих устройств, а J+N-х четвертых ЗУ соединены с соответствующими первыми входами J+N-х фазосдвигающих устройств, J выходов второго ЗУ соединены с первыми входами с первого по J-х четвертых ЗУ, N выходов третьего ЗУ соединены с первыми входами с J+1 по J+N четвертых ЗУ, отличающийся тем, что дополнительно в УУ введен блок расчета значений углов места, вход которого соединен с выходом ЗУ хранения значений координат ИРИ, а выход блока расчета значений углов места является четвертым выходом УУ, а в имитатор источников радиоизлучения дополнительно введены пятое ЗУ и шестое ЗУ, вторые входы которых соединены с четвертым выходом УУ, а первые входы соединены со вторым выходом УУ, пятое ЗУ имеет J выходов, а шестое ЗУ имеет N выходов, которые с первого по J-й выход пятого ЗУ соединено с соответствующими третьими входами J-х четвертых ЗУ, а с первого по N-й выход шестого ЗУ соединено с соответствующими третьими входами J+N-х четвертых ЗУ.
| Имитатор пространственно-разнесенных источников радиоизлучения | 2016 |
|
RU2627689C1 |
| ИМИТАТОР ПРОСТРАНСТВЕННО-РАЗНЕСЕННЫХ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ | 2021 |
|
RU2781853C1 |
| УСТРОЙСТВО ИМИТАЦИИ РАДИОЭЛЕКТРОННОЙ ОБСТАНОВКИ | 2020 |
|
RU2758591C1 |
| US 3514521 A, 26.05.1970 | |||
| DE 3400035 A1, 12.07.1984 | |||
| CN 102759730 A, 31.10.2012. | |||

