[0001] Настоящая заявка испрашивает преимущество приоритета предварительной заявки на патент США с серийным номером 63/033,258, озаглавленной "HYDRAULIC DELIVERY OF SURGICAL IMPLANTS," поданной 2 июня 2020 г., авторами изобретения по которой являются Тодд Табер (Todd Taber), Кэтрин Дженсен (Kathryn Jensen), Майкл Пьяцца (Michael Piazza), Джастин Эдвин Ли (Jestwin Edwin Lee), IV, Саумья Дилип Ядав (Saumya Dilip Yadav), Остин Ксавьер Родехивер (Austin Xavier Rodeheaver) и Прадип Магадум (Pradeep Magadum), которая включена в данный документ посредством ссылки во всей своей полноте, как если бы целиком и полностью была изложена в настоящем документе.
ОБЛАСТЬ ТЕХНИКИ
[0002] Настоящее изобретение, изложенное в прилагаемой формуле изобретения, относится в целом к глазной хирургии. Более конкретно, но без ограничения, заявленный объект изобретения относится к системам, устройствам и способам для вставки имплантата в глаз.
УРОВЕНЬ ТЕХНИКИ
[0003] Человеческий глаз может страдать от ряда заболеваний, вызывающих от небольшого ухудшения до полной потери зрения. Хотя контактные линзы и очки могут компенсировать некоторые недуги, для других может требоваться офтальмологическая хирургия. В некоторых случаях имплантаты могут быть полезными или желательными. Например, интраокулярная линза может заменить помутневшую естественную линзу в глазу для улучшения зрения.
[0004] Хотя преимущества интраокулярных линз и других имплантатов известны, усовершенствования систем доставки, компонентов и процессов продолжают улучшать результаты и приносить пользу пациентам.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0005] Новые и пригодные системы, устройства и способы для глазной хирургии изложены в прилагаемой формуле изобретения. Также приведены иллюстративные варианты осуществления, позволяющие специалисту в данной области изготовить и использовать заявленный объект изобретения.
[0006] Например, в некоторых вариантах осуществления предусмотрено устройство для доставки имплантата с использованием гидравлического давления или потока текучей среды. В более конкретных примерах имплантат может храниться, может быть продвинут и доставлен в глаз с использованием гидравлической жидкости, хранящейся в стерильном контейнере, через полый плунжер для продвижения. Плунжер может жестко продвигать имплантат в герметичное положение в первой фазе, а затем имплантат может быть продвинут в глаз с помощью гидравлического давления или потока текучей среды во второй фазе. Например, плунжер можно сначала использовать для продвижения имплантата к точке, в которой создано уплотнение вокруг имплантата в канале доставки. Затем имплантат может быть гидравлически продвинут для доставки. Например, текучая среда для доставки может проходить через отверстие в плунжере для продвижения имплантата. В некоторых вариантах осуществления устройство сопряжения или интерфейс имплантата, связанный с плунжером, может иметь форму для зацепления с заплечиком имплантата для продвижения.
[0007] Такие варианты осуществления могут быть особенно преимущественными для доставки интраокулярных линз, включая аккомодирующие линзы, которые могут представлять уникальные проблемы при доставке. Например, аккомодирующая линза может содержать текучую среду, которой можно управлять движением цилиарной мышцы для изменения силы линзы. Некоторые варианты осуществления могут управлять жидкостью в аккомодирующей линзе, чтобы сжимать относительно большую линзу для продвижения через приемлемо маленький разрез, управлять деформацией, вызванной перемещением текучей среды во время сжатия и выхода из наконечника, и осуществлять доставку предсказуемым и управляемым образом. Интраокулярная линза может дополнительно включать один или несколько гаптических элементов, которые могут проходить радиально для закрепления линзы внутри глаза. Некоторые варианты осуществления могут снизить сложность системы и количество этапов доставки, сохраняя при этом согласованность гаптического положения. Некоторые варианты осуществления могут также снизить количество рабочей жидкости для доставки.
[0008] В более широком смысле, некоторые варианты осуществления могут предусматривать устройство для продвижения линзы в системе доставки имплантата (ИОЛ). Устройство может содержать корпус, имеющий устройство сопряжения (интерфейс) плунжера, устройство сопряжения(интерфейс) привода и перепускной канал, расположенный между интерфейсом плунжера и интерфейсом привода. Плунжер может быть расположен внутри корпуса и плунжер может иметь первый конец, примыкающий к интерфейсу плунжера, второй конец и отверстие в плунжере между первым концом и вторым концом. Уплотнение плунжера может быть расположено внутри корпуса и соединено со вторым концом плунжера, а уплотнение привода может быть расположено внутри корпуса между уплотнением плунжера и интерфейсом привода. Внутри корпуса между уплотнением плунжера и уплотнением привода может быть образована камера для жидкости. Плунжер, уплотнение плунжера и уплотнение привода выполнены с возможностью перемещения в неподвижном отношении друг к другу внутри корпуса между первым положением и вторым положением. Как правило, первый конец плунжера может быть выполнен с возможностью перемещения через интерфейс плунжера. В первом положении уплотнение плунжера может по текучей среде изолировать отверстие от камеры для текучей среды(жидкости). Во втором положении перепускной канал может по текучей среде соединять отверстие с камерой для жидкости вокруг уплотнения плунжера. В более конкретных вариантах осуществления уплотнение привода может быть выполнено с возможностью перемещения в третье положение для перемещения жидкости из камеры для текучей среды(жидкости) через перепускной канал и отверстие.
[0009] Некоторые варианты осуществления могут дополнительно включать уплотнение наконечника и перепускное уплотнение. Уплотнение наконечника может быть расположено вблизи первого конца плунжера, а перепускное уплотнение может быть выполнено с возможностью расположения между уплотнением наконечника и перепускным каналом во втором положении.
[0010] В некоторых иллюстративных вариантах осуществления могут дополнительно содержаться устройство сопряжения(интерфейс) имплантата, соединенный с первым концом плунжера, который может быть выполнен с возможностью зацепления с частью имплантата для продвижения.
[0011] В некоторых вариантах осуществления могут дополнительно содержаться по меньшей мере один заливочный канал, выполненный с возможностью соединения по текучей среде отверстия с камерой для жидкости между первым положением и вторым положением. Заливочный канал может иметь меньшую скорость потока, чем перепускной канал.
[0012] В других вариантах осуществления может быть предусмотрено устройство для имплантации линзы в глаз. Такие варианты осуществления могут включать наконечник, имеющий просвет для доставки, ячейку для имплантата, соединенную с наконечником, и исполнительный механизм. Исполнительный механизм может содержать, например, корпус, плунжер, расположенный внутри корпуса, отверстие, соединенное по текучей среде с просветом для доставки через плунжер и ячейку для имплантата, камеру для жидкости и перепускной канал. Плунжер может быть выполнен с возможностью перемещения внутри корпуса из первого положения во второе положение для продвижения линзы из ячейки для имплантата(ИОЛ) в просвет для доставки. Отверстие может быть изолировано по текучей среде от камеры для жидкости в первом положении и может быть соединено по текучей среде с камерой для жидкости через перепускной канал во втором положении. Во втором положении исполнительный механизм может быть дополнительно выполнен с возможностью перемещения жидкости из камеры для жидкости в просвет для доставки через перепускной канал и отверстие.
[0013] В других вариантах осуществления может быть предусмотрен способ использования хирургической системы доставки. В некоторых примерах жидкость и гидравлический плунжер могут храниться и транспортироваться в исполнительный механизм. Исполнительный механизм может быть соединен с другими компонентами для хранения и транспортировки, или он может быть собран с другими компонентами для образования хирургической системы доставки в рабочей среде. Например, в некоторых вариантах осуществления исполнительный механизм может быть подключен к системе привода, выполненной с возможностью приведения в действие исполнительного механизма. Исполнительный механизм также может быть соединен с наконечником, выполненным с возможностью доставки имплантата через разрез. Хирургическая система доставки может дополнительно включать систему управления имплантатом, выполненную с возможностью ориентирования или манипулирования имплантатом для продвижения и доставки. В некоторых примерах система привода может толкать гидравлический плунжер для продвижения имплантата в просвет для доставки наконечника, в то время как уплотнение предотвращает перемещение жидкости через гидравлический плунжер. Затем система привода может продвигать уплотнение, позволяя жидкости перемещаться через перепускной канал вокруг уплотнения и в гидравлический плунжер. Отверстие в гидравлическом плунжере может пропускать жидкость в просвет для доставки, а гидравлическое давление жидкости может выталкивать имплантат из просвета для доставки.
[0014] В более широком смысле, некоторые варианты осуществления способа извлечения линзы из хирургической системы доставки могут включать установку линзы в ячейку для имплантата(ИОЛ), продвижение линзы из ячейки для имплантата в систему доставки с помощью жесткого плунжера, а затем соединение по текучей среде камеры для жидкости с отверстием в жестком плунжере через перепускной канал. Жидкость в перепускном канале затем может быть сдавлена для перемещения жидкости через перепускной канал и отверстие в просвет для доставки, и жидкость может продвигать линзу через просвет для доставки.
[0015] Признаки, элементы и аспекты, описанные в контексте некоторых вариантов осуществления, также могут быть опущены, объединены или заменены альтернативными признаками. Другие признаки, цели, преимущества и предпочтительный способ изготовления и использования заявленного объекта изобретения более подробно описаны ниже со ссылкой на сопроводительные графические материалы иллюстративных вариантов осуществления.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
[0016] На сопроводительных графических материалах проиллюстрированы некоторые цели, преимущества и предпочтительный способ изготовления и использования некоторых вариантов осуществления заявленного объекта изобретения. Подобные номера ссылок представляют подобные части в примерах.
[0017] На фиг. 1 представлен схематический вид иллюстративной системы для вставки ИОЛ в глаз.
[0018] На фиг. 2 представлено схематическое изображение примера системы по фиг. 1.
[0019] На фиг. 3 представлен подробный вид исполнительного механизма, который может быть связан с системой по фиг. 2.
[0020] На фиг. 4 представлен вид в сборе другого примера системы по фиг. 1.
[0021] На фиг. 5 представлен изометрический вид исполнительного механизма, проиллюстрированного на фиг. 4.
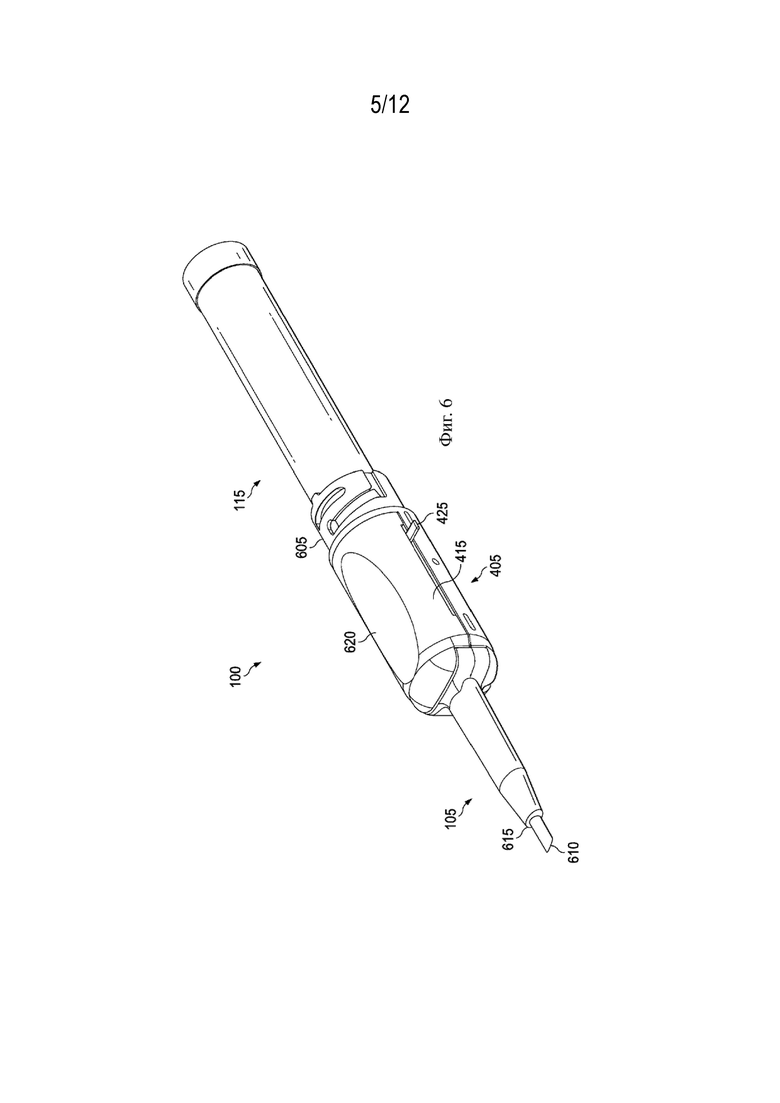
[0022] На фиг. 6 представлен изометрический вид системы по фиг. 4 в собранном виде.
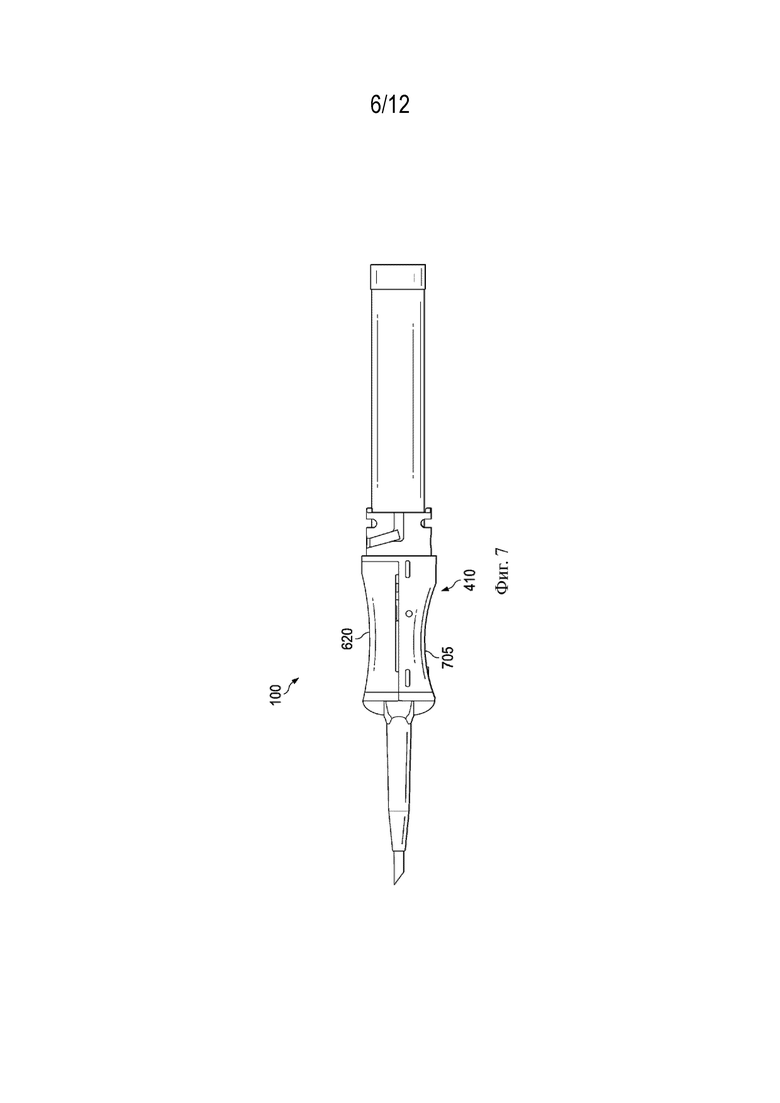
[0023] На фиг. 7 представлен вид сбоку системы по фиг. 6.
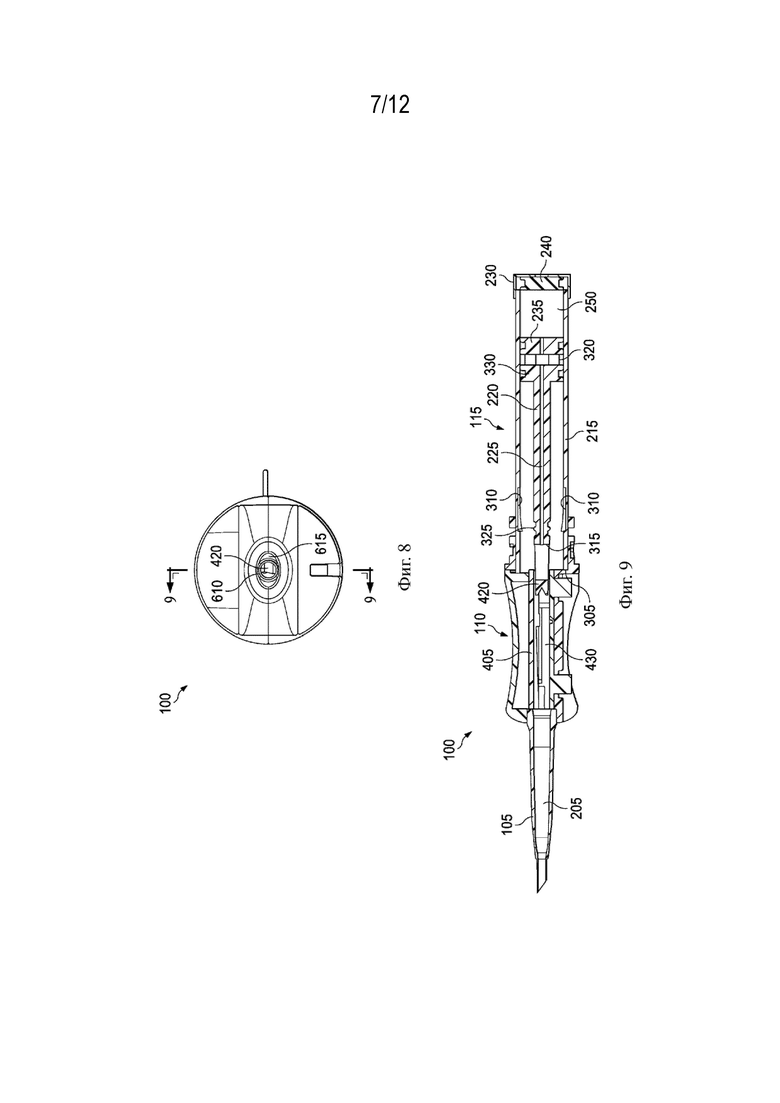
[0024] На фиг. 8 представлен вид спереди системы по фиг. 6.
[0025] На фиг. 9 представлен вид в разрезе системы по фиг. 8.
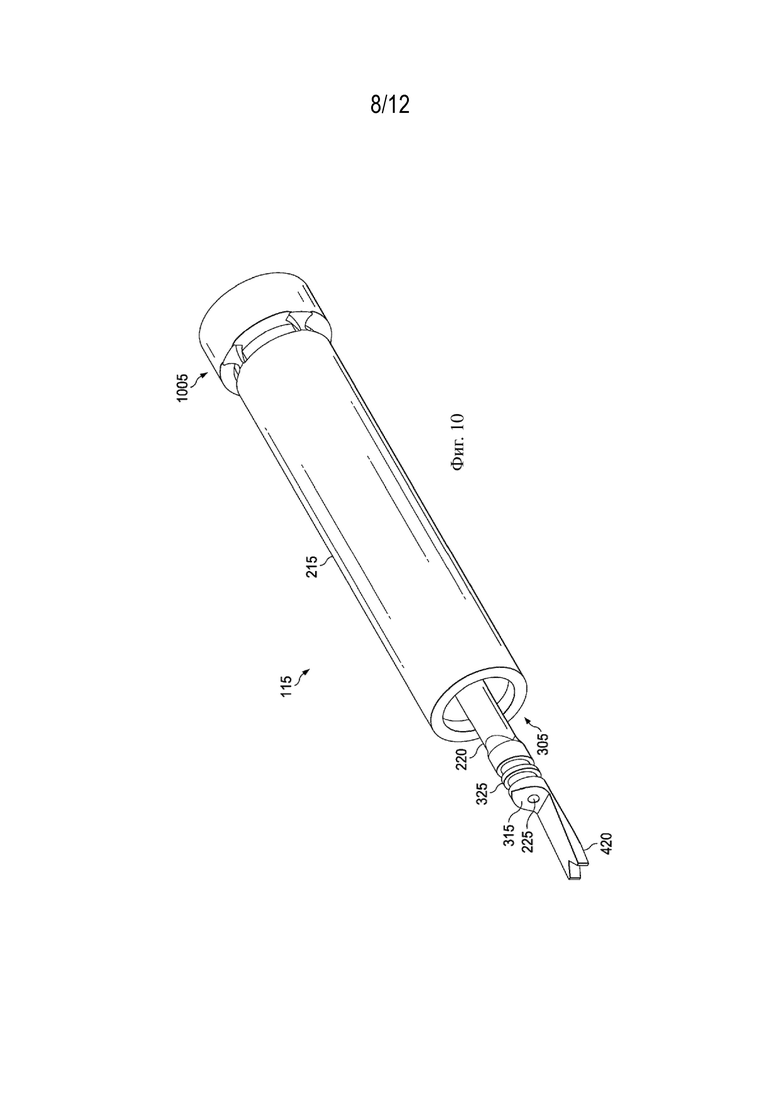
[0026] На фиг. 10 представлен изометрический вид другого примера исполнительного механизма, который может быть связан с системой по фиг. 1.
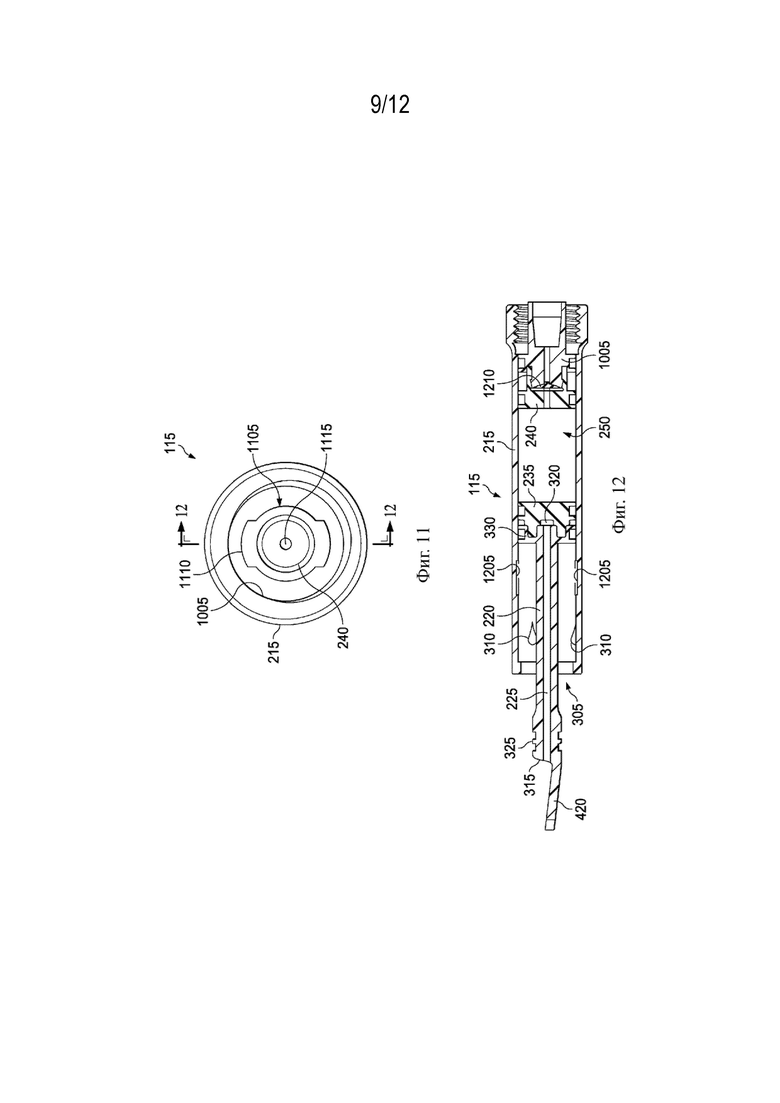
[0027] На фиг. 11 представлен вид сзади исполнительного механизма по фиг. 10.
[0028] На фиг. 12 представлен вид в разрезе исполнительного механизма по фиг. 11.
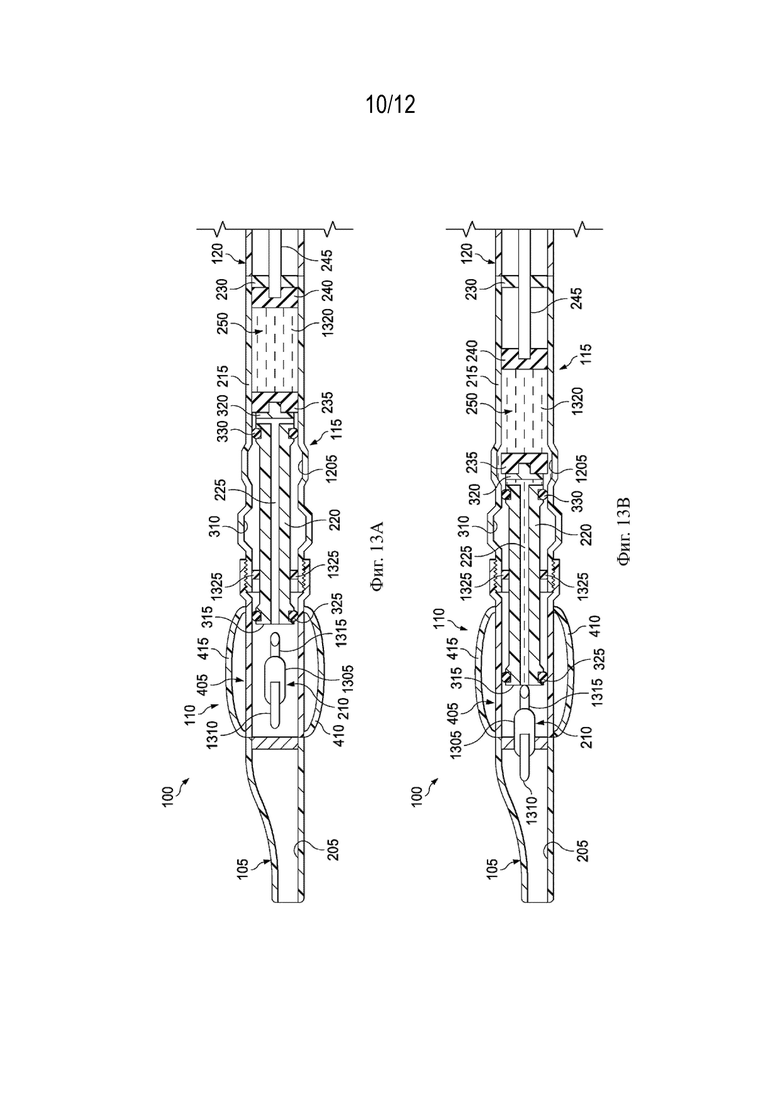
[0029] На фиг. 13A-13D представлены схематические изображения, отображающие иллюстративный способ извлечения ИОЛ из системы по фиг. 1.
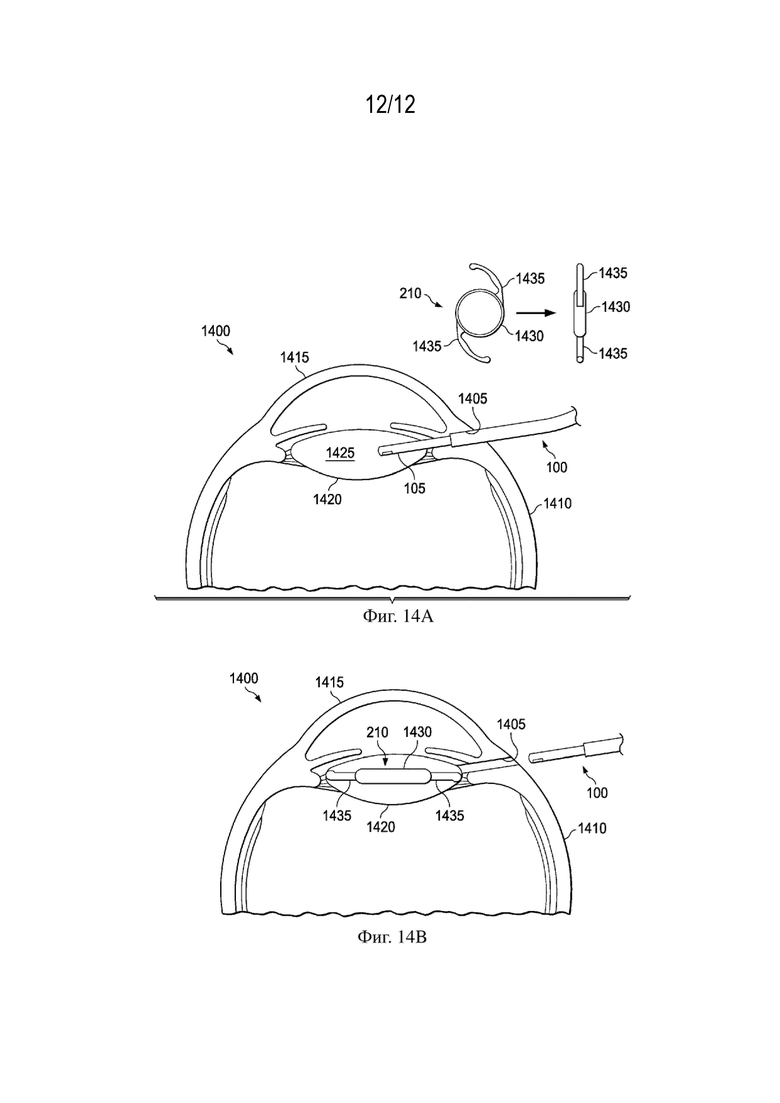
[0030] На фиг. 14A-14B представлены схематические изображения, отображающие иллюстративное применение системы по фиг. 1 для вставки ИОЛ в глаз.
ОПИСАНИЕ ИЛЛЮСТРАТИВНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0031] Следующее описание иллюстративных вариантов осуществления предоставляет информацию, которая позволяет специалисту в данной области изготовить и использовать объект изобретения, изложенный в прилагаемой формуле изобретения, но может опускать некоторые подробности, уже хорошо известные в данной области. Таким образом, следующее подробное описание следует рассматривать как иллюстративное, а не ограничивающее.
[0032] Иллюстративные варианты осуществления также могут быть описаны в настоящем документе со ссылкой на пространственные взаимосвязи между различными элементами или на пространственную ориентацию различных элементов, изображенных на прикрепленных графических материалах. В общем, такие взаимосвязи или ориентация предполагают рамки рассмотрения, соответствующие пациенту, находящемуся в положении получить имплантат, или относительно него. Однако, как должно быть признано специалистами в данной области, данные рамки рассмотрения являются просто описательным приемом, а не строгим предписанием.
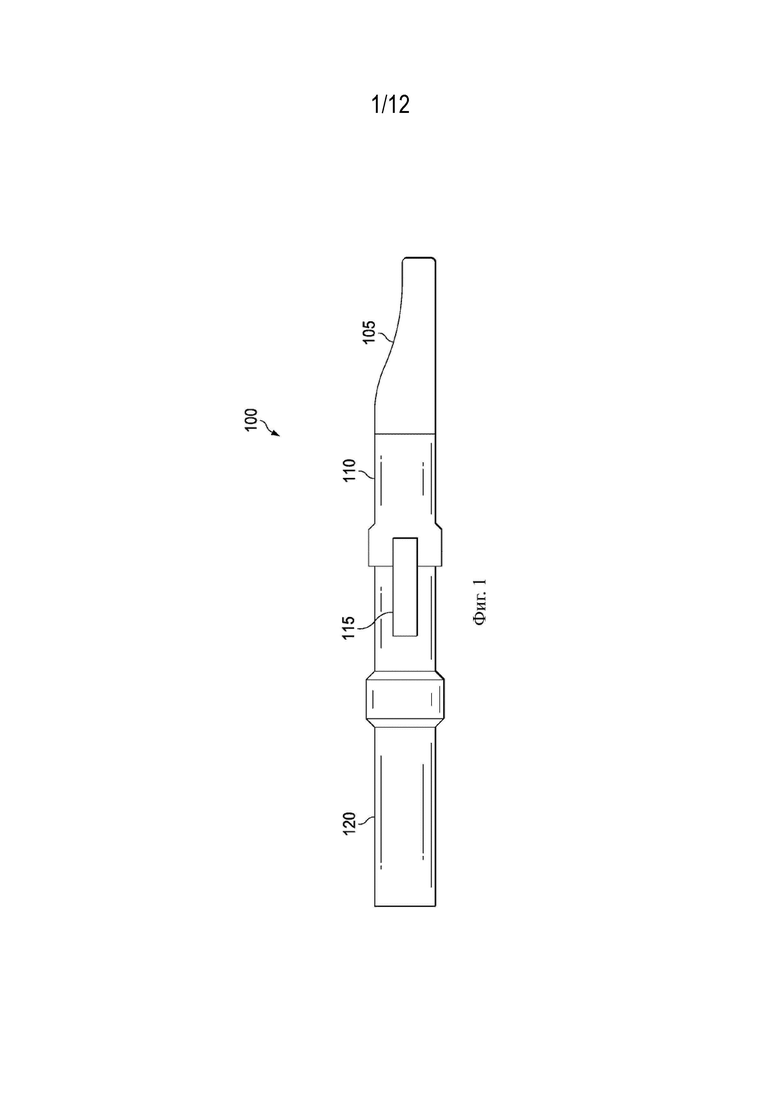
[0033] На фиг. 1 представлен схематический вид системы 100, которая может вставлять имплантат(ИОЛ) в глаз. В некоторых вариантах осуществления система 100 может содержать два или более модуля, которые могут быть выполнены с возможностью соединения и отсоединения в соответствии от обстоятельств для хранения, сборки, использования и утилизации. Например, как проиллюстрировано на фиг. 1, некоторые варианты осуществления системы 100 могут включать наконечник 105, ячейку 110 для имплантата(ИОЛ), соединенную с наконечником 105, и исполнительный механизм 115, соединенный с ячейкой 110 для имплантата(ИОЛ). В некоторых вариантах осуществления система 100 может дополнительно содержать модуль 120 привода, выполненный с возможностью зацепления с исполнительным механизмом 115.
[0034] Наконечник 105 обычно содержит кончик, приспособленный для вставки через разрез в глаз. Размер кончика может быть приспособлен к хирургическим требованиям и методам, если необходимо. Например, небольшие разрезы, как правило, предпочтительнее, чтобы сократить или свести к минимуму время заживления. Разрезы менее 3 миллиметров могут быть предпочтительными в некоторых случаях, а кончик наконечника 105 может иметь ширину менее 3 миллиметров в некоторых вариантах осуществления.
[0035] Ячейка 110 для ИОЛ (имплантата) обычно представляет собой широкий спектр устройств, которые подходят для хранения имплантата перед доставкой в глаз. В некоторых вариантах осуществления ячейка 110 для имплантата может дополнительно или альтернативно быть выполнена с возможностью подготовки имплантата к доставке. Например, некоторые варианты осуществления ячейки 110 для имплантата могут быть выполнены так, чтобы приводиться в действие хирургом или другим оператором для подготовки имплантата к доставке последующим действием исполнительного механизма 115. В некоторых случаях ячейка 110 для имплантата может быть выполнена так, чтобы активно деформировать, удлинять, расширять или иным образом манипулировать элементами имплантата до того, как имплантат будет продвинут в наконечник 105. Например, ячейка 110 для имплантата может быть выполнена с возможностью расширения или сращивания одного или нескольких элементов, таких как гаптические элементы интраокулярной линзы.
[0036] Исполнительный механизм 115, как правило, выполнен с возможностью продвижения имплантата из ячейки 110 для ИОЛ в наконечник 105, а затем из наконечника 105 через разрез и в глаз.
[0037] Модуль 120 привода, как правило, выполнен с возможностью электрического приведения в действие исполнительного механизма 115. В некоторых примерах модуль 120 привода может быть приведен в действие электрической, механической, гидравлической или пневматической энергией или их комбинациями, или каким-либо другим способом. В некоторых случаях модуль 120 привода может быть приведен в действие вручную. Согласно другим вариантам реализации модуль 120 привода может представлять собой автоматизированную систему.
[0038] В общем, компоненты системы 100 могут быть соединены непосредственно или опосредованно. Например, наконечник 105 может быть непосредственно соединен с ячейкой 110 для имплантата и может быть опосредованно соединен с исполнительным механизмом 115 через ячейку 110 для имплантата. Соединение может включать жидкостное, механическое, тепловое, электрическое или химическое соединение (такое как химическая связь), или некоторую комбинацию соединений в некоторых контекстах. Например, исполнительный механизм 115 может быть механически соединен с модулем 120 привода и может быть механически или по текучей среде соединен с ячейкой 110 для имплантата. В некоторых вариантах осуществления компоненты также могут быть соединены в силу близкого расположения, являясь неотъемлемой частью единой конструкции или будучи образованными из одного и того же куска материала.
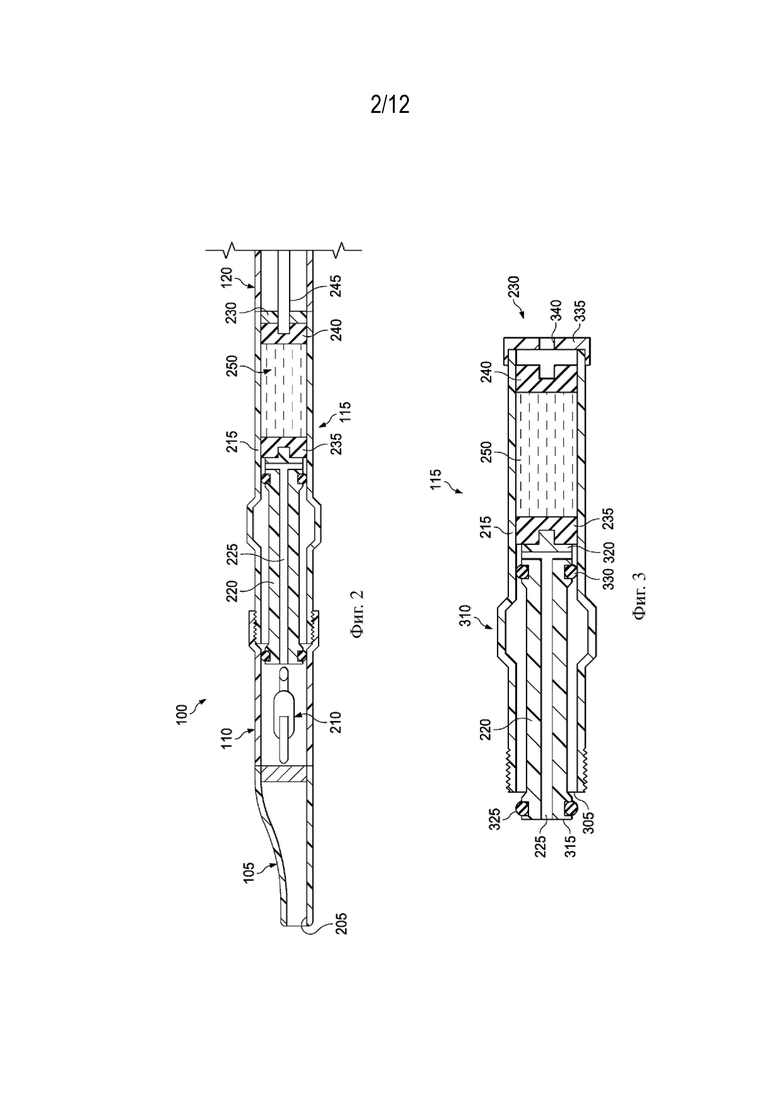
[0039] На фиг. 2 представлено схематическое изображение примера системы 100, иллюстрирующее дополнительные подробности, которые могут быть связаны с некоторыми вариантами осуществления. В примере по фиг. 2 наконечник 105 имеет просвет 205 для доставки, а имплантат 210 расположен внутри ячейки 110 для имплантата.
[0040] Исполнительный механизм 115 по фиг. 2, как правило, содержит корпус 215, плунжер 220, расположенный внутри корпуса 215, отверстие 225, проходящее через плунжер 220, и устройство сопряжения (интерфейс) 230 привода, выполненный с возможностью соединения с модулем 120 привода. Плунжер 220, как правило, состоит из по существу жесткого материала, такого как полимерный материал медицинского назначения. Уплотнение 235 плунжера может быть расположено внутри корпуса 215 и соединено с плунжером 220. Уплотнение 240 привода также может быть расположено внутри корпуса 215. В некоторых вариантах осуществления модуль 120 привода может содержать толкатель 245, выполненный с возможностью зацепления с уплотнением 240 привода через устройство сопряжения (интерфейс) 230 привода. Например, интерфейс 230 привода может содержать прорезь, выполненную с возможностью приема толкателя 245.
[0041] Как проиллюстрировано в примере по фиг. 2, уплотнение 240 привода может быть расположено между уплотнением 235 плунжера и интерфейсом 230 привода, и камера 250 для жидкости может быть образована внутри корпуса 215 между уплотнением 235 плунжера и уплотнением 240 привода. В иллюстративной конфигурации по фиг. 2 уплотнение 235 плунжера выполнено с возможностью обеспечения жидкостного уплотнения через весь корпус 215 и по существу предотвращения перемещения жидкости из камеры 250 для жидкости в отверстие 225. Уплотнение 240 привода также может быть выполнено с возможностью обеспечения жидкостного уплотнения через весь корпус 215 и по существу предотвращения перемещения жидкости из камеры 250 для жидкости в устройство сопряжения (интерфейс) 230 привода.
[0042] На фиг. 3 представлен подробный вид исполнительного механизма 115 по фиг. 2, иллюстрирующий дополнительные подробности, которые могут быть связаны с некоторыми вариантами осуществления. Например, корпус 215 по фиг. 3 дополнительно содержит интерфейс 305 плунжера и перепускной канал 310, расположенный между интерфейсом 305 плунжера и интерфейсом 230 привода. Перепускной канал 310 может принимать различные формы. Например, перепускной канал 310 может содержать выступ в корпусе 215, как проиллюстрировано на фиг. 3. В других примерах перепускной канал 310 может содержать канавку или углубление на внутренней поверхности корпуса 215. В некоторых вариантах осуществления перепускной канал 310 может содержать множество каналов. Например, множество каналов может быть расположено по окружности вокруг корпуса 215 в некоторых вариантах осуществления.
[0043] Плунжер 220, как правило, имеет первый конец 315 и второй конец 320, причем первый конец 315, как правило, расположен смежно с интерфейсом 305 плунжера. Отверстие 225, как правило, проходит через плунжер 220 в продольном направлении от первого конца 315 ко второму концу 320.
[0044] В некоторых вариантах осуществления исполнительный механизм 115 может дополнительно содержать уплотнение 325 наконечника и перепускное уплотнение 330. Каждое из уплотнений 325 наконечника и перепускных уплотнений 330, как правило, выполнено с возможностью создания уплотнения между частью плунжера 220 и корпусом 215, чтобы по существу предотвратить передвижение жидкости мимо уплотнения. Как проиллюстрировано в примере по фиг. 3, одно или оба уплотнения 325 наконечника и перепускного уплотнения 330 могут быть кольцевыми уплотнениями, такими как O-образное уплотнительное кольцо, расположенное по окружности вокруг части плунжера 220. В других примерах может быть подходящим зонтичное уплотнение. В более конкретных вариантах осуществления уплотнение 325 наконечника может быть расположено вблизи первого конца 315 плунжера 220, а перепускное уплотнение 330 может быть расположено вблизи второго конца 320 плунжера 220.
[0045] Интерфейс 230 привода по фиг. 3 содержит колпачок 335 и прорезь 340. Колпачок 335 может быть соединен с концом корпуса 215 для удержания уплотнения 240 привода и других компонентов внутри корпуса 215.
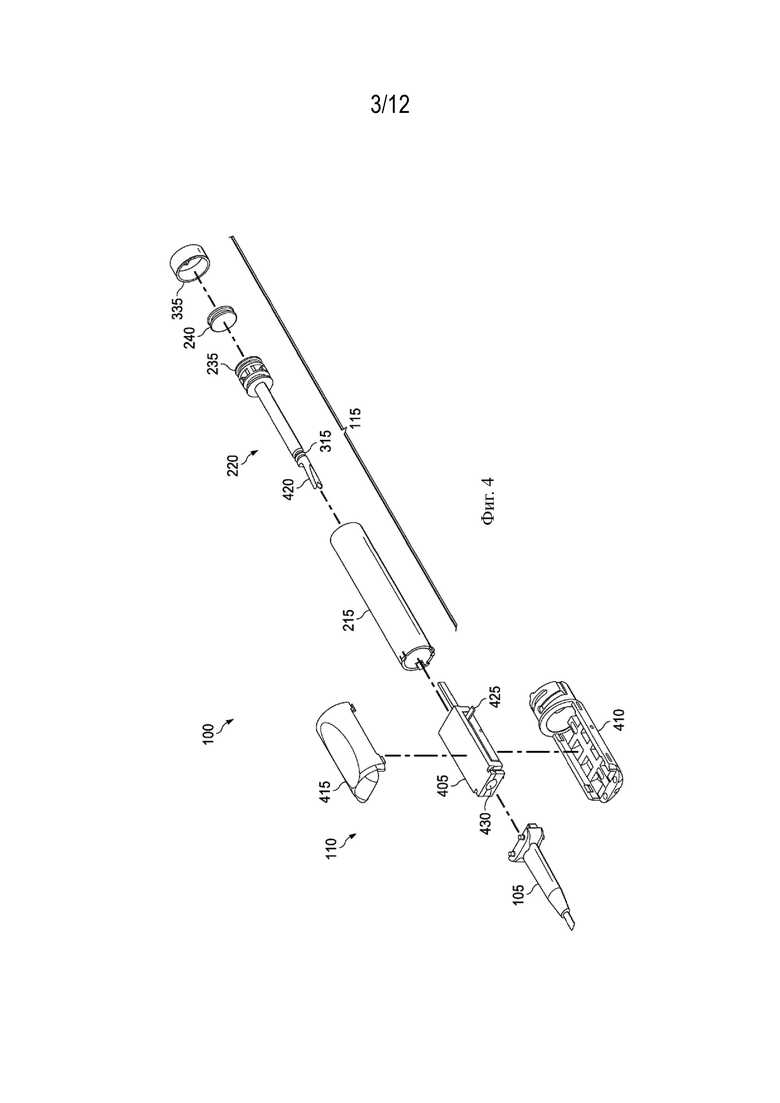
[0046] На фиг. 4 представлен вид в сборе другого примера системы 100. Как проиллюстрировано в примере по фиг. 4, ячейка 110 для имплантата может содержать систему 405 управления имплантатом, основание 410 и крышку 415. В различных вариантах осуществления система 405 управления имплантатом может представлять собой любую из большого разнообразия систем, устройств, компонентов или картриджей, которые выполнены с возможностью подготовки имплантата к доставке. Основание 410 и крышка 415 могут быть выполнены таким образом, чтобы по существу охватывать систему 405 управления имплантатом. Основание 410 и крышка 415 также могут быть выполнены с возможностью механического соединения с наконечником 105 и исполнительным механизмом 115.
[0047] Корпус 215 по фиг. 4 содержит полый цилиндр, который может принимать плунжер 220, уплотнение 235 плунжера и уплотнение 240 привода. На фиг. 4 также проиллюстрирован пример интерфейса 420 имплантата, который может быть соединен с первым концом 315 плунжера 220 в некоторых вариантах осуществления. В примере по фиг. 4 плунжер 220 и уплотнение 235 плунжера могут быть вставлены в корпус 215, а затем может быть добавлена подходящая рабочая жидкость перед вставкой уплотнения 240 привода и прикреплением колпачка 335 к корпусу 215.
[0048] В некоторых примерах имплантат (не показан) может быть предварительно загружен в систему 405 управления имплантатом. Система 405 управления имплантатом, как правило, выполнена с возможностью хранения имплантата и манипулирования им. Например, некоторые варианты осуществления системы 40 управления имплантатом могут быть выполнены с возможностью ориентирования или складывания имплантата. В некоторых конкретных случаях система 405 управления имплантатом может быть выполнена с возможностью складывания, сращивания или выпрямления гаптических элементов интраокулярной линзы. В примере по фиг. 4 система 405 управления имплантатом содержит рычаг 425, который можно использовать для манипулирования имплантатом внутри камеры 430 для имплантата. Другие примеры могут дополнительно или альтернативно содержать другие подходящие механизмы для манипулирования рычагом 425, такие как поворотный элемент, колпачок или колесо. В примере по фиг. 4 рычаг 425 выполнен так, чтобы принимать приведение пользователем в действие системы 405 управления имплантатом.
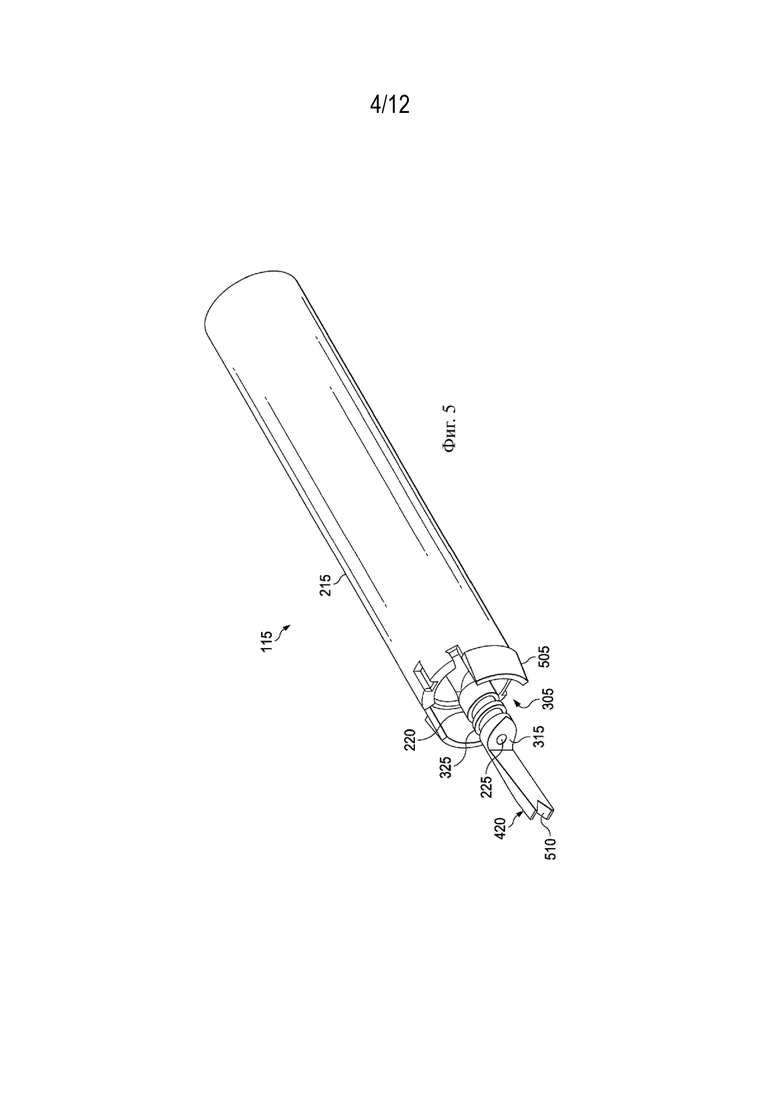
[0049] На фиг. 5 представлен изометрический вид исполнительного механизма 115 по фиг. 4 в собранном виде. Как проиллюстрировано в примере по фиг. 5, некоторые варианты осуществления интерфейса 305 плунжера могут содержать отверстие в корпусе 215 и один или несколько фиксирующих язычков 505. Интерфейс 420 имплантата и по меньшей мере часть плунжера 220 могут проходить через интерфейс 305 плунжера. Уплотнение 325 наконечника по фиг. 5 содержит O-образное уплотнительное кольцо, расположенное вокруг плунжера 220 смежно с первым концом 315. Как видно в примере по фиг. 5, отверстие 225 может образовывать отверстие в первом конце 315. В некоторых вариантах осуществления отверстие может быть расположено по центру через первый конец 315, а интерфейс 420 имплантата может быть соединен с плунжером 220 смежно с отверстием на первом конце 315. Интерфейс 420 имплантата может содержать вырез 510, который может быть выполнен с возможностью зацепления с имплантатом.
[0050] На фиг. 6 представлен изометрический вид системы 100 по фиг. 4 в собранном виде, иллюстрирующий дополнительные подробности, которые могут быть связаны с некоторыми вариантами осуществления. Как проиллюстрировано в примере по фиг. 6, система 100 может иметь тонкую, удлиненную форму. В некоторых случаях исполнительный механизм 115 может быть по меньшей мере частично вставлен в ячейку 110 для имплантата и закреплен в положении с помощью фиксирующего механизма 605, приспособленного для зацепления с взаимоблокирующими элементами исполнительного механизма 115, такими как фиксирующие язычки 505. В других примерах исполнительный механизм 115 может быть закреплен с помощью других подходящих крепежных элементов, посадки с натягом или термического, или химического соединения.
[0051] Как проиллюстрировано в примере по фиг. 6, некоторые варианты осуществления наконечника 105 могут содержать кончик 610 для вставки и защитный элемент 615 от разреза. Кончик 610 для вставки может быть приспособлен для минимизации сил сдвига при разрезе. В некоторых примерах кончик 610 для вставки может быть скошен или расположен под углом. Защитный элемент 615 от разреза может содержать расширяющуюся часть, приспособленную для контакта с глазом вокруг разреза, чтобы ограничить глубину проникновения кончика 610 для вставки.
[0052] Некоторые варианты осуществления системы 100 могут дополнительно включать различные эргономические характеристики. На фиг. 6, например, крышка 415 системы 405 управления имплантатом включает рельефный участок 620. Рельефный участок 620 по фиг. 6 имеет неглубокое углубление, образованное в крышке 415 для размещения, например, одного или нескольких пальцев оператора. Рельефный участок 620 может дополнительно иметь текстурированную поверхность, которая может улучшить сцепление с системой 100 и управление над ней.
[0053] На фиг. 7 представлен вид сбоку системы 100 по фиг. 6, иллюстрирующий дополнительные подробности, которые могут быть связаны с некоторыми вариантами осуществления. Как проиллюстрировано в примере по фиг. 7, основание 410 может иметь рельефный участок 705, аналогичный рельефному участку 620.
[0054] На фиг. 8 представлен вид спереди системы 100 по фиг. 6. Как проиллюстрировано на фиг. 8, кончик 610 для вставки может иметь круглый профиль, а защитный элемент 615 от разреза может иметь эллиптический профиль. Кончик 610 для вставки и защитный элемент 615 от разреза могут быть концентрическими в некоторых вариантах осуществления, как проиллюстрировано в примере по фиг. 8.
[0055] На фиг. 9 представлен вид в разрезе системы 100 по фиг. 8 вдоль линии 9-9, иллюстрирующий дополнительные подробности, которые могут быть связаны с некоторыми вариантами осуществления. В примере по фиг. 9 наконечник 105 соединен с ячейкой 110 для имплантата и исполнительный механизм 115 соединен с ячейкой 110 для имплантата. Плунжер 220 расположен внутри корпуса 215, а отверстие 225 проходит через плунжер 220 между первым концом 315 и вторым концом 320. Уплотнение 235 плунжера может быть расположено внутри корпуса 215 и соединено со вторым концом 320 плунжера 220.
[0056] Уплотнение 240 привода может быть расположено между уплотнением 235 плунжера и интерфейсом 230 привода, а камера 250 для жидкости может быть образована внутри корпуса 215 между уплотнением 235 плунжера и уплотнением 240 привода. В иллюстративной конфигурации по фиг. 9 уплотнение 235 плунжера выполнено с возможностью обеспечения жидкостного уплотнения через весь корпус 215 и по существу предотвращения перемещения жидкости из камеры 250 для жидкости в отверстие 225. Уплотнение 240 привода также может быть выполнено с возможностью обеспечения жидкостного уплотнения через весь корпус 215 и по существу предотвращения перемещения жидкости из камеры 250 для жидкости в интерфейс 230 привода.
[0057] Перепускной канал 310 может быть расположен между интерфейсом 305 плунжера и интерфейсом 230 привода. Перепускной канал 310 по фиг. 9 содержит углубление на внутренней поверхности корпуса 215.
[0058] При сборке, как проиллюстрировано на фиг. 9, камера 430 для имплантата может обеспечивать путь для жидкости между отверстием 225 и просветом 205 для доставки. Камера 430 для имплантата также может быть выполнена с возможностью вмещения части плунжера 220, включая интерфейс 420 имплантата в некоторых вариантах осуществления.
[0059] Пример конфигурации по фиг. 9, как правило, подходит для хранения имплантата (не показан) перед доставкой. Более конкретно, уплотнение 235 плунжера и уплотнение 240 привода могут быть расположены в первом положении, при этом уплотнение 235 плунжера по текучей среде изолирует отверстие 225 и перепускной канал 310 от камеры 250 для жидкости, позволяя хранить подходящую рабочую жидкость в камере 250 для жидкости. Подходящие рабочие жидкости могут включать, без ограничения, жидкость, такую как солевой раствор, или вязкую смазку с неньютоновскими свойствами.
[0060] На фиг. 10 представлен изометрический вид другого примера исполнительного механизма 115, иллюстрирующий дополнительные подробности, которые могут быть связаны с некоторыми вариантами осуществления. Исполнительный механизм 115 по фиг. 10 аналогичен исполнительному механизму 115 по фиг. 5. Например, интерфейс 305 плунжера по фиг. 10 может содержать отверстие в корпусе 215, а интерфейс 420 имплантата и по меньшей мере часть плунжера 220 могут проходить через интерфейс 305 плунжера. Уплотнение 325 наконечника по фиг. 10 содержит O-образное уплотнительное кольцо, расположенное вокруг плунжера 220 смежно с первым концом 315. Как видно в примере по фиг. 10, отверстие 225 может образовывать отверстие в первом конце 315. В некоторых вариантах осуществления отверстие может быть расположено по центру через первый конец 315, а интерфейс 420 имплантата может быть соединен с плунжером 220 смежно с отверстием на первом конце 315. Исполнительный механизм 115 по фиг. 10 дополнительно содержит фитинг 1005 для жидкости.
[0061] На фиг. 11 представлен вид сзади исполнительного механизма 115 по фиг. 10, иллюстрирующий дополнительные подробности, которые могут быть связаны с некоторыми вариантами осуществления фитинга 1005 для жидкости. В примере по фиг. 11 по меньшей мере часть фитинга 1005 для жидкости может составлять единое целое с корпусом 215. Фитинг 1005 для жидкости может быть наконечником Люэра, креплением Люэра или аналогичным фитингом, выполненным с возможностью размещения шприца или другого устройства. Например, фитинг 1005 для жидкости по фиг. 11 содержит гнездовой наконечник 1105 Люэра, имеющий по меньшей мере один фиксирующий язычок 1110, выполненный с возможностью зацепления резьбы на совместимом штыревом наконечнике Люэра. Разъем 1115 может быть расположен в уплотнении 240 привода гнездового наконечника 1105 Люэра.
[0062] На фиг. 12 представлен вид в разрезе исполнительного механизма 115 по фиг. 11 вдоль линии 12-12. В примере по фиг. 12 плунжер 220 расположен внутри корпуса 215, а отверстие 225 проходит через плунжер 220 между первым концом 315 и вторым концом 320. Уплотнение 235 плунжера может быть расположено внутри корпуса 215 и соединено со вторым концом 320 плунжера 220. Интерфейс 420 имплантата может быть соединен с первым концом 315 в некоторых вариантах осуществления плунжера 220.
[0063] Уплотнение 240 привода может быть встроено в фитинг 1005 для жидкости или соединено с ним, а камера 250 для жидкости может быть образована внутри корпуса 215 между уплотнением 235 плунжера и уплотнением 240 привода. В иллюстративной конфигурации по фиг. 12 уплотнение 235 плунжера выполнено с возможностью обеспечения жидкостного уплотнения через весь корпус 215 и по существу предотвращения перемещения жидкости между отверстием 225 и камерой 250 для жидкости. Уплотнение 240 привода также может быть выполнено с возможностью обеспечения жидкостного уплотнения через весь корпус 215 и по существу предотвращения перемещения жидкости между интерфейсом 230 привода и камерой 250 для жидкости.
[0064] Перепускной канал 310 может быть расположен между интерфейсом 305 плунжера и уплотнением 240 привода. В более конкретных вариантах осуществления перепускной канал 310 может быть расположен между интерфейсом 305 плунжера и уплотнением 235 плунжера. Перепускной канал 310 по фиг. 12 содержит углубление на внутренней поверхности корпуса 215. В некоторых примерах перепускной канал 310 может иметь ширину, которая увеличивается с расстоянием от уплотнения 235 плунжера.
[0065] Как проиллюстрировано в примере по фиг. 12, некоторые варианты осуществления исполнительного механизма 115 могут необязательно иметь по меньшей мере один заливочный канал 1205. Заливочный канал 1205 может принимать различные формы. Например, заливочный канал 1205 может содержать канавку или углубление на внутренней поверхности корпуса 215, как проиллюстрировано в примере по фиг. 12. В других примерах заливочный канал 1205 может содержать выступ в корпусе 215. В некоторых вариантах осуществления заливочный канал 1205 может содержать множество каналов. Например, множество каналов может быть расположено по окружности вокруг корпуса 215 в некоторых вариантах осуществления.
[0066] В примере по фиг. 12 уплотнение 325 наконечника расположено вблизи первого конца 315 плунжера 220, а перепускное уплотнение 330 расположено вблизи второго конца 320 плунжера 220.
[0067] Как проиллюстрировано на фиг. 12, разъем 1115 может содержать заполняющее уплотнение 1210. Заполняющее уплотнение 1210 может содержать самоуплотняющийся материал, приспособленный для обеспечения проникновения жидкости при уплотнении после удаления. Например, исполнительный механизм 115 по фиг. 12 может транспортироваться и храниться без жидкости в камере 250 для жидкости. Затем шприц или другой подходящий источник жидкости (не показан) может быть соединен с фитингом 1105 для жидкости через разъем 1115 и заполняющее уплотнение 1210 для добавления подходящей рабочей жидкости в камеру 250 для жидкости. Дополнительно или альтернативно обратный клапан или зонтичный клапан может быть выполнен с возможностью обеспечения прохождения жидкости в камеру 250 для жидкости и предотвращения обратного потока.
[0068] На фиг. 13A-13D представлены схематические изображения, отображающие иллюстративный способ извлечения имплантата 210 из системы 100. Первоначально различные компоненты системы могут быть собраны при необходимости. Например, наконечник 105, ячейка 110 для имплантата и исполнительный механизм 115 могут быть соединены друг с другом, как проиллюстрировано на фиг. 13А. Система 120 привода также может быть соединена с исполнительным механизмом 115 через интерфейс 230 привода. Например, толкатель 245 может входить в зацепление с уплотнением 240 привода через интерфейс 230 привода, как проиллюстрировано на фиг. 13А.
[0069] Имплантат 210 может быть предусмотрен в системе 405 управления имплантатом ячейки 110 для имплантатов, как проиллюстрировано в примере по фиг. 13А. В некоторых вариантах осуществления имплантат 210 может содержать интраокулярную линзу, имеющую оптический элемент 1305, ведущий гаптический элемент 1310 и задний гаптический элемент 1315. Интраокулярная линза может иметь форму, подобную форме естественной линзы глаза, и она может быть изготовлена из множества материалов. Примеры подходящих материалов могут включать силикон, акрил и комбинации таких подходящих материалов. В некоторых случаях имплантат 210 может содержать интраокулярную линзу, которая заполнена жидкостью, такую как заполненная жидкостью аккомодирующая интраокулярная линза.
[0070] В некоторых примерах рабочая жидкость 1320 может храниться в камере 250 для жидкости. В других примерах, таких как вариант осуществления по фиг. 10, рабочая жидкость 1320 может быть добавлена в камеру 250 для жидкости в любое время перед использованием.
[0071] Плунжер 220, уплотнение 235 плунжера и уплотнение 240 привода, как правило, выполнены с возможностью перемещения внутри корпуса между первым положением, как проиллюстрировано в примере по фиг. 13A, и другими положениями, проиллюстрированными на фиг. 13B-13D.
[0072] В первом положении по фиг. 13А уплотнение 235 плунжера по текучей среде изолирует отверстие 225 от рабочей жидкости 1320 в камере 250 для жидкости, что может позволить рабочей жидкости 1320 храниться внутри камеры 250 для жидкости в первом положении. В некоторых примерах уплотнение 325 наконечника и первый конец 315 плунжера 220 могут выступать в ячейку 110 имплантата в первом положении, как проиллюстрировано на фиг. 13А, что может создавать уплотнение в ячейке 110 имплантата позади имплантата 210. В некоторых примерах первый конец 315 плунжера 220 также может входить в зацепление с имплантатом 210 в первом положении. В других примерах уплотнение 325 наконечника и первый конец 315 могут содержаться внутри корпуса 215 в первом положении.
[0073] В некоторых вариантах осуществления система 405 управления имплантатом может быть приведена в действие для конфигурации имплантата 210 для доставки. Например, система 405 управления имплантатом может выпрямлять один или несколько из ведущего гаптического элемента 1310 и заднего гаптического элемента 1315.
[0074] В некоторых вариантах осуществления система 120 привода может перемещать толкатель 245 относительно уплотнения 240 привода. Плунжер 220, уплотнение 235 плунжера, уплотнение 240 привода и рабочая жидкость 1320 могут быть жестко перемещены во второе положение, сохраняя фиксированную взаимосвязь, как проиллюстрировано на фиг. 13B, в ответ на силу толкателя 245 на уплотнении 240 привода. В примере по фиг. 13B имплантат 210 также частично продвинут в просвет 205 для доставки наконечника 105 первым концом 315 плунжера 220. Например, первый конец 315 может входить в зацепление с оптическим элементом 1305 в некоторых вариантах осуществления. Продвижение может также пассивно выпрямлять задний гаптический элемент 1315 в некоторых вариантах осуществления. Во втором положении по фиг. 13B уплотнение 235 плунжера продвинуто в положение, смежное с заливочным каналом 1205. Заливочный канал 1205 по текучей среде соединяет камеру 250 для жидкости с отверстием 225 вокруг уплотнения 235 плунжера. Поскольку толкатель 245 и уплотнение 240 привода прикладывают давление на рабочую жидкость 1320 в камере 250 для жидкости, рабочая жидкость 1320 может перемещаться в отверстие 225 через заливочный канал 1205.
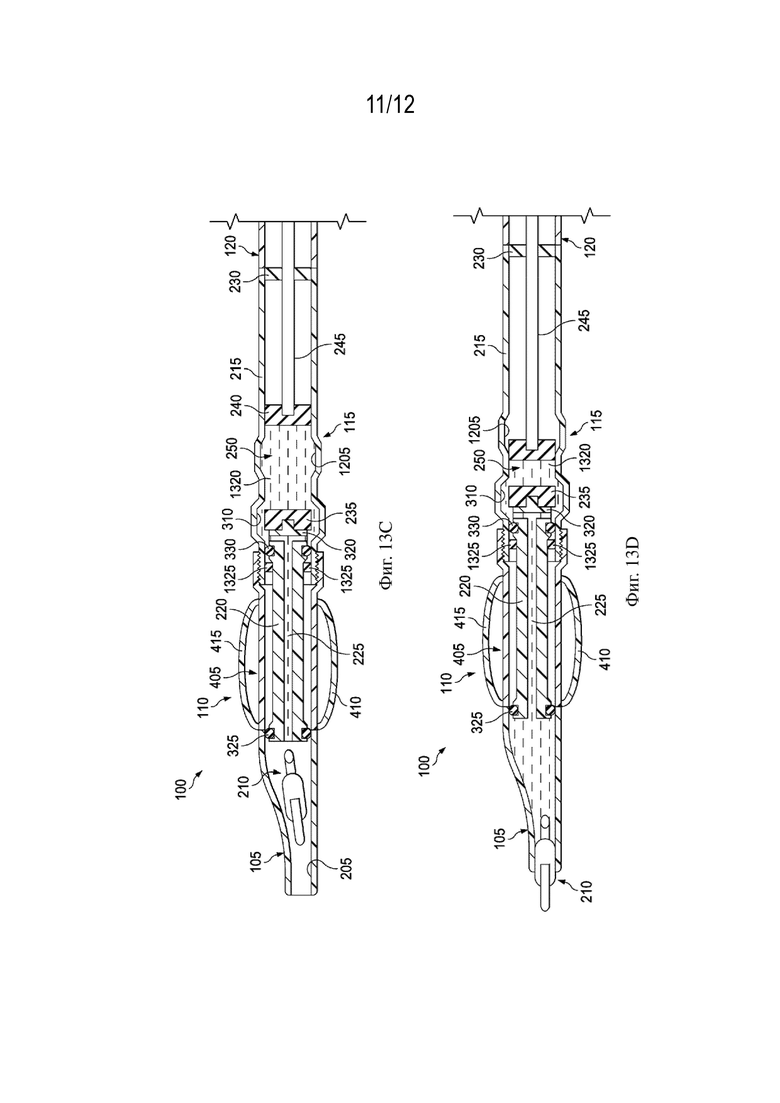
[0075] В общем, скорость потока жидкости через заливочный канал 1205 является достаточно низкой и кратковременной, чтобы свести к минимуму образование пузырьков в жидкости и поддерживать давление в рабочей жидкости 1320, достаточное для продолжения продвижения уплотнения 235 плунжера и плунжера 220 в третье положение, как проиллюстрировано на фиг. 13C, в ответ на давление, приложенное толкателем 245 к уплотнению 240 привода. В положении по фиг. 13С имплантат 210 продвинут дальше в просвет 205 для доставки, что может создавать жидкостное уплотнение между имплантатом 210 и просветом 205 для доставки. В некоторых примерах имплантат 210 может быть расположен полностью внутри просвета 205 для доставки. В третьем положении перепускной канал 310 по текучей среде соединяет отверстие 225 с камерой 250 для жидкости вокруг уплотнения 235 плунжера. Поскольку толкатель 245 и уплотнение 240 привода прикладывают давление на рабочую жидкость 1320 в камере 250 для жидкости, рабочая жидкость 1320 может перемещаться в отверстие 225 через перепускной канал 310 беспрепятственно при более высокой скорости потока.
[0076] Плунжер 220 может быть удержан в третьем положении по фиг. 13С против дальнейшего усилия, приложенного к уплотнению 240 привода. Например, в некоторых вариантах осуществления второй конец 320 плунжера 220 может быть расширен, а интерфейс 305 плунжера может быть выполнен с возможностью зацепления со вторым концом 320 для ограничения продвижения. Дополнительно или альтернативно ячейка 110 для имплантата или наконечник 105 может содержать стопорный элемент 1325 для плунжера, выполненный с возможностью зацепления с некоторой частью или элементом плунжера 220, таким как второй конец 320 плунжера 220, для предотвращения дальнейшего продвижения. В еще других примерах некоторые варианты осуществления просвета 205 для доставки могут быть сужены, что может препятствовать дальнейшему продвижению плунжера 220 в направлении к кончику 615 для вставки. Например, диаметр просвета 205 для доставки может уменьшаться по мере приближения к кончику 615 для вставки.
[0077] При удержании плунжера 220 дополнительное давление, прикладываемое уплотнением 240 привода к рабочей жидкости 1320, может перемещать рабочую жидкость 1320 через перепускной канал 310 и отверстие 225, как проиллюстрировано в примере по фиг. 13D. Перемещение рабочей жидкости 1320 из отверстия 225 в просвет 205 для доставки под давлением уплотнения 240 привода может увеличить давление и скорость потока рабочей жидкости 1320 в просвете 205 для доставки позади имплантата 210, что может продвигать имплантат 210 дальше через просвет 205 для доставки до тех пор, пока имплантат 210 не будет извлечен.
[0078] На фиг. 14A-14B представлены схематические изображения, дополнительно иллюстрирующие пример использования системы 100 для доставки имплантата 210 в глаз 1400. Например, как проиллюстрировано, хирург может выполнить в глазу 1400 разрез 1405. В некоторых случаях разрез 1405 может быть выполнен через склеру 1410 глаза 1400. В других случаях разрез может быть сделан в роговице 1415 глаза 1400. Разрез 1405 может иметь такой размер, чтобы обеспечить возможность вставки части наконечника 105 для доставки имплантата 210 в капсульный мешок 1420. Например, в некоторых случаях размер разреза 1405 может иметь длину менее чем приблизительно 3000 микронов (3 миллиметра). В других случаях разрез 1405 может иметь длину от приблизительно 1000 микронов до приблизительно 1500 микронов, от приблизительно 1500 микронов до приблизительно 2000 микронов, от приблизительно 2000 микронов до приблизительно 2500 микронов или от приблизительно 2500 микронов до приблизительно 3000 микронов.
[0079] После того как разрез 1405 выполнен, наконечник 105 может быть вставлен через разрез 1405 во внутреннюю часть 1425 глаза 1400. Затем система 100 может извлечь имплантат 210 через наконечник 105 в капсульный мешок 1420 глаза 1400. В некоторых применениях имплантат 210 может быть доставлен в сложенной конфигурации и может быть возвращен в исходное, развернутое состояние внутри капсульного мешка 1420, как показано на фиг. 14B. В примере по фиг. 14B имплантат 210 иллюстрирует интраокулярную линзу, имеющую оптический элемент 1430 и гаптические элементы 1435. Например, имплантат 210 может быть в виде аккомодирующей интраокулярной линзы, имеющей оптический элемент 1430 и/или гаптические элементы 1435, заполненные жидкостью. Капсульный мешок 1420 может удерживать имплантат 210 внутри глаза 1400 относительно глаза 1400 таким образом, что оптический элемент 1430 преломляет свет, направленный на сетчатку (не показана). Гаптические элементы 1435 могут входить в зацепление с капсульным мешком 1420 для закрепления имплантата 210 в нем. После выдачи имплантата 210 в капсульный мешок 1420 наконечник 105 может быть извлечен из глаза 1400 через разрез 1405, и глазу 1400 позволяют восстановиться в течение некоторого периода времени.
[0080] Системы, устройства и способы, описанные в настоящем документе, могут предоставить значительные преимущества. Например, некоторые варианты осуществления могут быть особенно преимущественными для доставки интраокулярных линз, включая заполненные жидкостью аккомодирующие линзы, которые могут представлять уникальные проблемы при доставке. Некоторые варианты осуществления могут сжимать относительно большую линзу для прохождения через приемлемо маленький разрез, управлять деформацией, вызванной перемещением жидкости во время сжатия и выхода из наконечника, и осуществлять доставку предсказуемым и управляемым образом. Дополнительно некоторые варианты осуществления могут снизить сложность системы и количество этапов доставки, сохраняя при этом согласованность гаптического положения. Некоторые варианты осуществления могут также снизить количество рабочей жидкости для доставки.
[0081] Несмотря на то, что это показано в нескольких иллюстративных вариантах осуществления, специалист в данной области техники поймет, что системы, устройства и способы, описанные в настоящем документе, допускают различные изменения и модификации, которые подпадают под объем прилагаемой формулы изобретения. Более того, описания различных альтернатив с использованием таких терминов, как «или», не требуют взаимной исключительности, если этого явно не требует контекст, а формы единственного числа не ограничивают объект одним случаем, если этого явно не требует контекст. Компоненты также могут быть объединены или исключены в различных конфигурациях для целей продажи, производства, сборки или использования. Например, в некоторых конфигурациях наконечник 105, ячейка 110 для имплантата, исполнительный механизм 115, система 120 привода могут быть отделены друг от друга или объединены различными способами для производства или продажи. Формула изобретения может также охватывать дополнительный объект изобретения, конкретно не описанный в подробностях. Например, определенные признаки, элементы или аспекты могут быть опущены из формулы изобретения, если нет необходимости отличать новизну и изобретательский уровень от того, что уже известно специалисту в данной области техники. Признаки, элементы и аспекты, описанные в контексте некоторых вариантов осуществления, также могут быть опущены, объединены или заменены альтернативными признаками, служащими той же, эквивалентной или аналогичной цели, без отступления от объема настоящего изобретения, определенного прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКАЯ ДОСТАВКА ХИРУРГИЧЕСКИХ ИНТРАОКУЛЯРНЫХ ЛИНЗ | 2021 |
|
RU2840038C2 |
| УСТРОЙСТВО ДЛЯ ВВЕДЕНИЯ ИНТРАОКУЛЯРНОЙ ЛИНЗЫ | 2016 |
|
RU2708190C2 |
| УСТРОЙСТВО ДЛЯ ВВЕДЕНИЯ ИНТРАОКУЛЯРНОЙ ЛИНЗЫ С ТЕМПЕРАТУРНОЙ КОМПЕНСАЦИЕЙ | 2015 |
|
RU2695562C2 |
| РАЗДВИЖНОЙ ИНЪЕКТОР С ГИДРАВЛИЧЕСКИМ ДЕМПФИРОВАНИЕМ ДЛЯ ДОСТАВКИ ЛИНЗОВОГО КОМПОНЕНТА ВНУТРЬ ГЛАЗА | 2019 |
|
RU2806615C2 |
| СИСТЕМЫ И СПОСОБЫ ДЛЯ ИМПЛАНТАЦИИ ИНТРАОКУЛЯРНОЙ ЛИНЗЫ | 2014 |
|
RU2662860C2 |
| ИНЖЕКТОР ДЛЯ ИМПЛАНТАЦИИ ИНТРАОКУЛЯРНОЙ ЛИНЗЫ | 2018 |
|
RU2762348C2 |
| ПРЕДВАРИТЕЛЬНО ЗАГРУЖЕННАЯ ИНТРАОКУЛЯРНАЯ ЛИНЗОВАЯ (ИОЛ) СИСТЕМА | 2013 |
|
RU2644940C2 |
| ШУНТ, ИМПЛАНТАТ, СИСТЕМА И СПОСОБ СНИЖЕНИЯ ВНУТРИГЛАЗНОГО ДАВЛЕНИЯ, СПОСОБ ИЗГОТОВЛЕНИЯ ИМПЛАНТАТА ДЛЯ РОГОВИЦЫ (ВАРИАНТЫ) | 2001 |
|
RU2262331C2 |
| СИСТЕМА ДОСТАВКИ ГЛАЗНОГО ИМПЛАНТАТА | 2013 |
|
RU2636859C2 |
| ИНЖЕКТОР ДЛЯ ИМПЛАНТАЦИИ ИНТРАОКУЛЯРНОЙ ЛИНЗЫ | 2016 |
|
RU2679306C1 |
Группа изобретений относится к медицине. Устройство для доставки интраокулярной линзы (ИОЛ) в глаз с использованием потока гидравлической текучей среды или давления. ИОЛ может храниться, может быть продвинута и доставлена в глаз с использованием гидравлической текучей среды, хранящейся в стерильном контейнере, через полый плунжер для продвижения. Плунжер может жестко продвигать ИОЛ в герметичное положение в первой фазе, а затем ИОЛ может быть продвинута в глаз с помощью гидравлического давления или потока текучей среды во второй фазе. Применение данной группы изобретений позволит сжимать относительно большую линзу для прохождения через приемлемо маленький разрез, управлять деформацией, вызванной перемещением жидкости во время сжатия и выхода из наконечника, и осуществлять доставку предсказуемым и управляемым образом. 3 н. и 17 з.п. ф-лы, 14 ил.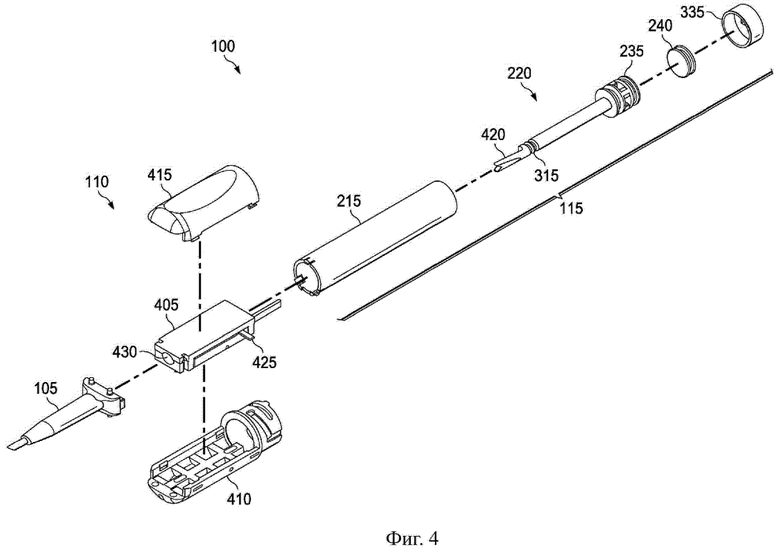
1. Устройство для продвижения интраокулярной линзы (ИОЛ) в системе доставки ИОЛ, при этом устройство содержит:
корпус, содержащий устройство сопряжения плунжера, устройство сопряжения привода и перепускной канал, расположенный между устройством сопряжения плунжера и устройством сопряжения привода;
плунжер, расположенный внутри корпуса, причем плунжер имеет первый конец, смежный с устройством сопряжения плунжера, второй конец и отверстие между первым концом и вторым концом;
уплотнение плунжера, расположенное внутри корпуса и соединенное со вторым концом плунжера;
уплотнение привода, расположенное внутри корпуса между уплотнением плунжера и устройством сопряжения привода; и
камеру для текучей среды, образованную внутри корпуса между уплотнением плунжера и уплотнением привода;
при этом плунжер, уплотнение плунжера и уплотнение привода выполнены с возможностью перемещения внутри корпуса между первым положением, в котором уплотнение плунжера по текучей среде изолирует отверстие от камеры для текучей среды, и вторым положением, в котором перепускной канал по текучей среде соединяет отверстие с камерой для текучей среды вокруг уплотнения плунжера.
2. Устройство по п. 1, в котором уплотнение привода выполнено с возможностью перемещения в третье положение для перемещения текучей среды из камеры для текучей среды через перепускной канал и отверстие.
3. Устройство по п. 1, дополнительно содержащее:
уплотнение наконечника, расположенное вблизи первого конца плунжера; и
перепускное уплотнение, выполненное с возможностью расположения между уплотнением наконечника и перепускным каналом во втором положении.
4. Устройство по п. 2, в котором уплотнение наконечника содержит первое кольцевое уплотнение, а перепускное уплотнение содержит второе кольцевое уплотнение.
5. Устройство по п. 2, в котором уплотнение наконечника содержит зонтичное уплотнение.
6. Устройство по любому предыдущему пункту, дополнительно содержащее устройство сопряжения ИОЛ, соединенное с первым концом плунжера.
7. Устройство по любому предыдущему пункту, в котором первый конец плунжера выполнен с возможностью перемещения через устройство сопряжения плунжера.
8. Устройство по любому предыдущему пункту, в котором перепускной канал содержит каналы, расположенные по окружности вокруг корпуса.
9. Устройство по любому предыдущему пункту, в котором корпус дополнительно содержит заливочный канал, выполненный с возможностью соединения по текучей среде отверстия с камерой для текучей среды между первым положением и вторым положением.
10. Устройство по п. 9, в котором заливочный канал имеет меньшую скорость потока, чем перепускной канал.
11. Устройство по любому предыдущему пункту, в котором устройство сопряжения привода выполнено с возможностью приема толкателя для зацепления с уплотнением привода внутри корпуса.
12. Устройство по любому предыдущему пункту, дополнительно содержащее текучую среду, расположенную в камере для текучей среды.
13. Устройство по любому предыдущему пункту, дополнительно содержащее:
толкатель, выполненный с возможностью зацепления с уплотнением привода через устройство сопряжения привода.
14. Устройство для имплантации интраокулярной линзы (ИОЛ) в глаз, при этом устройство содержит:
наконечник, имеющий просвет для доставки;
ячейку для ИОЛ, соединенную с наконечником; и
исполнительный механизм, содержащий корпус, плунжер, расположенный внутри корпуса и выполненный с возможностью перемещения из первого положения во второе положение для продвижения ИОЛ из ячейки для ИОЛ в просвет для доставки, отверстие, соединенное по текучей среде с просветом для доставки через плунжер и ячейку для ИОЛ, камеру для текучей среды и перепускной канал;
при этом отверстие изолировано по текучей среде от камеры для текучей среды в первом положении и соединено по текучей среде с камерой для текучей среды через перепускной канал во втором положении.
15. Устройство по п. 14, в котором исполнительный механизм выполнен с возможностью перемещения текучей среды из камеры для текучей среды в просвет для доставки через перепускной канал и отверстие во втором положении.
16. Устройство по п. 14, в котором исполнительный механизм дополнительно содержит уплотнение привода, выполненное с возможностью перемещения текучей среды из камеры для текучей среды через перепускной канал и отверстие во втором положении.
17. Устройство по любому из пп. 14-16, в котором исполнительный механизм дополнительно содержит заливочный канал, выполненный с возможностью соединения по текучей среде отверстия с камерой для текучей среды между первым положением и вторым положением.
18. Устройство по п. 17, в котором:
перепускной канал имеет первую скорость потока;
заливочный канал имеет вторую скорость потока; и
вторая скорость потока меньше, чем первая скорость потока.
19. Устройство по любому из пп. 14-18, в котором:
ячейка для ИОЛ содержит систему управления ИОЛ, имеющую камеру для ИОЛ; и
плунжер, выполненный с возможностью перемещения по меньшей мере частично через камеру для ИОЛ для продвижения ИОЛ.
20. Способ извлечения интраокулярной линзы (ИОЛ) из хирургической системы доставки, при этом способ содержит:
обеспечение ИОЛ в ячейке для ИОЛ;
продвижение ИОЛ из ячейки для ИОЛ в просвет для доставки с помощью жесткого плунжера;
соединение по текучей среде камеры для текучей среды с отверстием в жестком плунжере через перепускной канал;
сдавливание текучей среды в камере для текучей среды для перемещения текучей среды через перепускной канал и отверстие в просвет для доставки; и
продвижение ИОЛ через просвет для доставки с текучей средой.
| US 20140276898 A1, 18.09.2014 | |||
| Устройство для передачи и приема информации | 1990 |
|
SU1800623A1 |
| US 20150238687 A1, 27.08.2015 | |||
| US 20170119522 A1, 04.05.2017. | |||

