Изобретение относится к области оптико-электронной техники, в частности к устройствам наблюдения и прицеливания для объектов авиационной техники, и может быть использовано в авиационных прицельно-навигационных комплексах для повышения точности применения неуправляемых боеприпасов.
Известен прибор наблюдения [1], выбранный в качестве прототипа, предназначенный для обзора местности, обнаружения и распознавания целей, обеспечения целеуказания, управляемый дистанционно органами управления объекта применения.
Прибор наблюдения состоит из оптического блока и блока управления. Оптический блок выполнен в едином герметичном корпусе. Для обзора местности применен тепловизионный канал и телевизионный канал, содержащий объектив и матричное фотоприемное устройство, электрически связанное с блоком управления. Телевизионный канал установлен на гиростабилизированной в вертикальной и горизонтальной плоскостях платформе. Гиростабилизированная платформа имеет вертикальный привод, горизонтальный привод, механизмы арретирования приводов, блок гироскопического датчика и цифровые датчики угла. Вертикальный привод позволяет изменять направление линии визирования от минус 15 до плюс 45 градусов, горизонтальный точный привод - от минус 7 до плюс 7 градусов.
Для реализации работы системы стабилизации в приборе наблюдения применяется двухстепенной гироскоп роторного типа с синхронным гистерезисным электродвигателем, ротор которого вращается на сферическом подшипнике, что не обеспечивает высокую точность наведения.
Основными недостатками прототипа являются низкая виброустойчивость при воздействии высокочастотных колебаний, небольшие углы наведения привода по вертикали и точного привода наведения по горизонту, невысокая точность наведения линии визирования из-за использования двухстепенного гироскопа роторного типа. Незначительное увеличение диапазона углов наведения приводит к значительному увеличению габаритов прибора наблюдения.
Выполнение блока управления в виде отдельного блока приводит к увеличению массы прибора ввиду наличия дополнительного блока, требует дополнительного подключения и размещения на объекте.
Задачами изобретения являются увеличение вертикальных и горизонтальных углов наведения линии визирования, повышение точности наведения в широком диапазоне воздействующих частот при сохранении минимальных габаритов и массы оптико-электронного прибора целеуказания.
Для решения этой задачи в оптико-электронном приборе целеуказания, содержащем электронный блок и оптический блок, включающий в себя телевизионный канал, состоящий из оптически сопряженного объектива и матричного фотоприемного устройства, электрически связанного с электронным блоком, выход которого имеет возможность подключения к внешним устройствам, а также электропривод вертикального наведения с механизмом арретирования, датчик угла вертикального наведения, электропривод горизонтального наведения, датчик угла горизонтального наведения, гироскопический датчик и модуль управления, электрически связанный с электронным блоком, при этом датчик угла вертикального наведения, датчик угла горизонтального наведения, электропривод вертикального наведения с механизмом арретирования и электропривод горизонтального наведения электрически связаны с модулем управления, в отличие от прототипа, содержит амортизационно-демпфирующую раму, состоящую из амортизационного подвеса и параллелограммного механизма, образованного подвижной и неподвижной платформами, соединенными между собой посредством рычажного механизма с промежуточной тягой, оптический блок и электронный блок выполнены в едином герметичном корпусе с защитным стеклом и образуют оптико-электронный блок, жестко связанный с подвижной платформой амортизационно-демпфирующей рамы, оптический блок установлен в горизонтальных осях оптико-электронного блока с возможностью поворота вокруг горизонтальной оси посредством кинематической связи с электроприводом горизонтального наведения и датчиком угла горизонтального наведения, перед объективом расположен оптический элемент вертикального наведения, предназначенный для изменения направления визирной оси телевизионного канала и установленный с возможностью поворота вокруг вертикальной оси, ортогональной линии визирования телевизионного канала, посредством кинематической связи с электроприводом вертикального наведения с механизмом арретирования и датчиком угла вертикального наведения, при этом в качестве оптического элемента вертикального наведения может использоваться призма АР-90° или плоское зеркало, в качестве гироскопического датчика используется гироскоп, изготовленный по технологии МЭМС, закрепленный на корпусе оптического блока и электрически связанный с модулем управления.
В оптико-электронный блок могут быть введены нагреватель, электрически связанный с электронным блоком, и датчик температуры, расположенный на защитном стекле и электрически связанный с нагревателем.
Установление оптического блока в горизонтальных осях оптико-электронного блока с возможностью поворота вокруг его горизонтальной оси, введение оптического элемента вертикального наведения с возможностью поворота вокруг вертикальной оси и использование в качестве оптического элемента вертикального наведения призмы АР-90° или плоского зеркала позволяет увеличить углы наведения линии визирования, а также позволяет использовать компактный привод вертикального наведения, что приводит к существенному уменьшению габаритов и массы оптико-электронного прибора целеуказания.
Использование в качестве гироскопического датчика гироскопа, изготовленного по технологии МЭМС, и закрепление его на корпусе оптического блока позволяет повысить точность наведения.
Размещение оптико-электронного блока на амортизационно-демпфирующей раме, состоящей из амортизационного подвеса и параллелограммного механизма, шарниры которого имеют малое трение и малый люфт и образованного подвижной и неподвижной платформами, соединенными между собой посредством рычажного механизма с промежуточной тягой, обеспечивает стабилизацию линии визирования в пространстве при воздействии высокочастотных колебаний, что приводит к повышению точности наведения.
Введение в оптико-электронный блок нагревателя, электрически связанного с электронным блоком, и датчика температуры, расположенного на защитном стекле и электрически связанного с нагревателем, обеспечивает работоспособность оптико-электронного прибора целеуказания при отрицательных температурах.
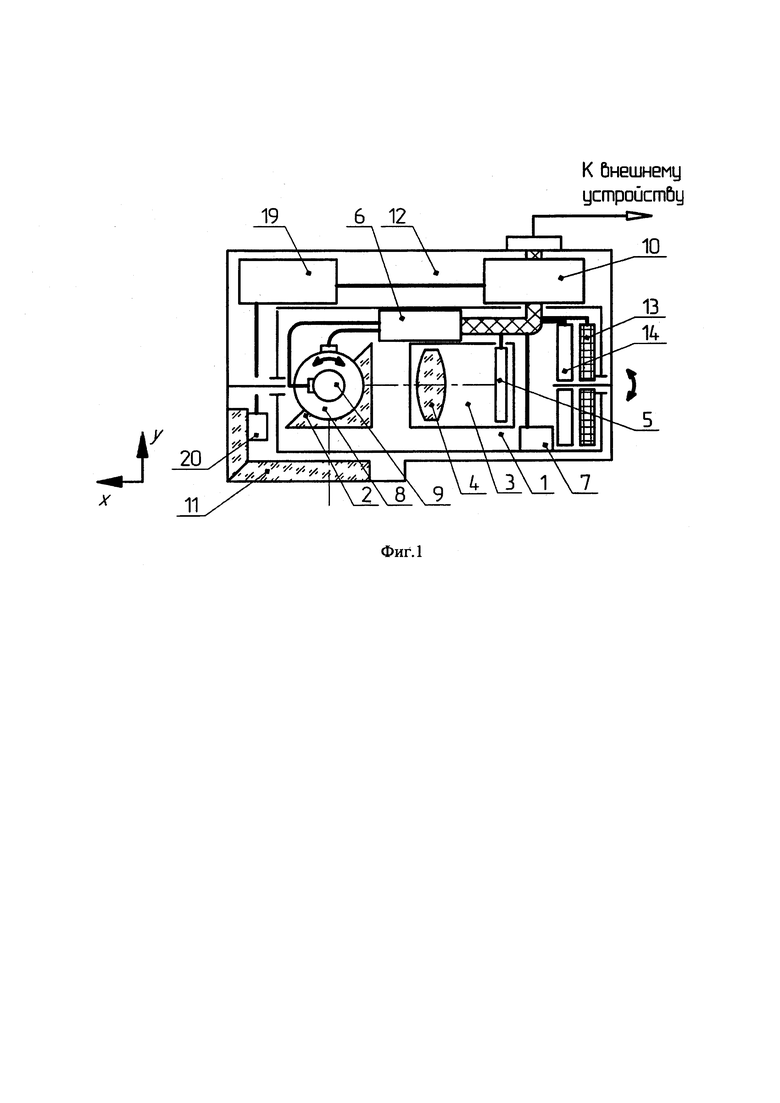
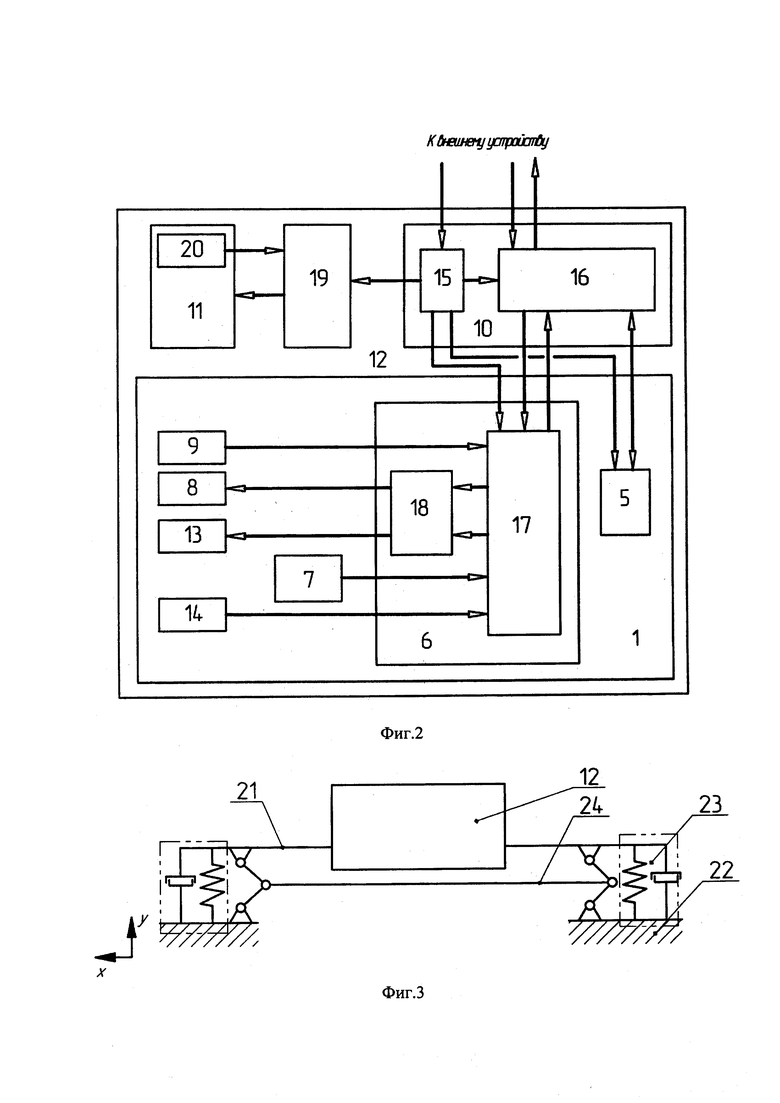
На фиг. 1 представлена принципиальная схема оптико-электронного прибора целеуказания. На фиг. 2 функциональная электрическая схема. На фиг. 3 изображена кинематическая схема амортизационно-демпфирующего устройства оптико-электронного прибора целеуказания.
Оптический блок 1 состоит из оптически сопряженного оптического элемента вертикального наведения 2 и телевизионного канала 3, включающего объектив 4 и матричное фотоприемное устройство 5, а также модуля управления 6, гироскопического датчика 7, закрепленного на корпусе оптического блока 1 и электрически связанного с модулем управления 6. В качестве гироскопического датчика 7 используется гироскоп, изготовленный по технологии МЭМС (микроэлектронномеханическая система).
Оптический элемент вертикального наведения 2 предназначен для изменения направления визирной оси телевизионного канала 3 и установлен с возможностью поворота вокруг вертикальной оси, ортогональной линии визирования телевизионного канала 3 посредством кинематической связи с электроприводом вертикального наведения 8 с механизмом арретирования и датчиком угла вертикального наведения 9. Электропривод вертикального наведения 8 с механизмом арретирования и датчик угла вертикального наведения 9 электрически связаны с модулем управления 6. Углы наведения по вертикали составляют от минус 40 до плюс 70 градусов.
В качестве оптического элемента вертикального наведения 2 используется призма АР-90° или плоское зеркало.
Арретирование призмы АР-90° осуществляется вне рабочих углов наведения при помощи механического фиксатора.
Оптический блок 1 и электронный блок 10 выполнены в едином герметичном корпусе с защитным стеклом 11 и образуют оптико-электронный блок 12. При этом электронный блок 10 электрически связан с модулем управления 6 и матричным фотоприемным устройством 5 и имеет возможность подключения к внешним устройствам.
Оптический блок 1 установлен с возможностью поворота вокруг горизонтальной оси оптико-электронного блока 12 посредством кинематической связи с электроприводом горизонтального наведения 13 и датчиком угла горизонтального наведения 14. Электропривод горизонтального наведения 13 и датчик угла горизонтального наведения 14 электрически связаны с модулем управления 6. Углы наведения по горизонту составляют от минус 30 до плюс 30 градусов.
Электроприводы вертикального 8 и горизонтального наведения 13 выполнены на базе трехфазных электрических двигателей. Датчики угла вертикального 9 и горизонтального наведения 14 состоят из ротора, выполненного в виде кольца с абсолютной шкалой, и статора, выполненного в виде оптической головки.
Защитное стекло 11 может быть одиночным или выполненным из нескольких состыкованных защитных стекол, обеспечивающих герметичность оптико-электронного блока 12.
Электронный блок 10 включает в себя источник вторичных напряжений 15 и приемо-передающие устройство 16. Приемо-передающие устройство 16 принимает с объекта команды управления электроприводами вертикального 8 и горизонтального наведения 13, управляет работой матричного фотоприемного устройства 5 и выдает на него режимы состояния этих устройств. Также приемопередающие устройство 16 электронным образом формирует прицельную марку.
Модуль управления 6 включает в себя суммирующе-преобразующее устройство 17 и усилитель мощности 18.
Оптико-электронный блок 12 содержит нагреватель 19, электрически связанный с электронным блоком 10, а также датчик температуры 20, расположенный на защитном стекле 11 и электрически связанный с нагревателем 19.
Оптико-электронный блок 12 размещен на амортизационно-демпфирующей раме, состоящей из подвижной платформы 21 жестко связанной с оптико-электронным блоком 12 и неподвижной платформы 22, предназначенной для установки оптико-электронного прибора целеуказания на кронштейны, жестко связанные с элементами планера летательного аппарата, причем подвижная 21 и неподвижная 22 платформы связаны амортизаторами 23, образующими амортизационный подвес. Подвижная 21 и неподвижная 22 платформы соединены между собой посредством рычажного механизма с промежуточной тягой 24, позволяющей осуществлять перемещение подвижной платформы 21 относительно неподвижной платформы 22, и образуют параллелограмный механизм.
К оптико-электронному прибору целеуказания могут подключаться один или несколько мониторов для отображения фоно-целевой обстановки.
Работает оптико-электронный прибор целеуказания следующим образом.
По сигналу включения, поступающему от внешнего устройства, электронный блок 10 формирует вторичное напряжение на матричном фотоприемном устройстве 5 и модуле управления 6, запуская цикл включения матричного фотоприемного устройства 5 и модуля управления 6, по завершению которого электронный блок 10 формирует и выдает во внешнее устройство сигнал готовности оптико-электронного прибора целеуказания.
Изображение фоно-целевой обстановки формируется объективом 4 на матричном фотоприемном устройстве 5 после прохождения световым потоком защитного стекла 11, отражения и преломления призмой АР-90°. Полученное изображение в цифровом виде передается в электронный блок 10. С помощью команд управления, поступающих с внешнего устройства в цифровом виде на приемо-передающее устройство 16 и далее на матричное фотоприемное устройство 5, осуществляется выбор размеров полей зрения и алгоритмов улучшения изображения. Прицельная марка формируется электронным образом приемопередающим устройством 16 электронного блока 10.
В режиме наведения с внешнего устройства в приемо-передающее устройство 16 электронного блока 10 подаются цифровые коды о скорости и направлении наведения, которые транслируются в суммирующе-преобразующее устройство 17 модуля управления 6. Одновременно на суммирующе-преобразующее устройство 17 с датчиков угла вертикального 9 и горизонтального наведения 14 в цифровом виде приходит информация о положении осей оптической системы, а с гироскопического датчика 7 информация об угловых скоростях движения объекта, на котором установлен прибор. Полученные суммирующе-преобразующим устройством 17 сигналы формируют разностный сигнал, который поступает в усилитель мощности 18 и преобразуются в нем в ток управления электроприводами вертикального 8 и горизонтального наведения 13. Электропривода вертикального 8 и горизонтального наведения 13 создают моменты сил, приводящие к развороту оптического блока 1 и призмы АР-90°.
Таким образом, при движении объекта линия визирования автоматически сохраняет свое положение в пространстве и одновременно осуществляется наведение по командам с внешнего устройства.
Нагреватель 19 включает нагревательные элементы при температуре внутреннего объема ниже заданной температуры и работает до тех пор, пока температура внутреннего объема не превысит заданное значение. Контроль осуществляется по датчику температуры 20. При включении оптико-электронного прибора целеуказания при температурах ниже заданной, нагреватель 19 может работать по внутреннему таймеру. Нагреватель 19 отключается по датчику температуры 20 или по времени таймера.
Амортизационно-демпфирующее устройство предназначено для защиты оптико-электронного блока 12 от вибрации и ударов. В случае возникновения ударных и вибрационных нагрузок четыре амортизатора 23 гасят колебания неподвижной платформы 22, а параллелограмный механизм исключает возможность перехода угловых колебаний в линейные, тем самым сохраняя направление линии визирования в пространстве.
Оптико-электронный прибор целеуказания устанавливается внутри отсека на кронштейны, жестко связанные с элементами планера летательного аппарата, таким образом, чтобы защитное стекло 11 прибора наблюдения располагалась за защитным стеклом люка обтекателя. Блоки из состава прицельно-навигационного комплекса размещаются в удобном для обслуживания месте, пульты управления и мониторы могут размещаться в доступном и эргономически целесообразном месте при их наличии.
Таким образом, заявленный оптико-электронный прибор целеуказания позволяет увеличить вертикальные и горизонтальные углы наведения линии визирования, повысить точность наведения линии визирования при сохранении минимальных габаритов и массы прибора, обеспечивает работоспособность прибора при отрицательных температурах и позволяет повысить виброустойчивость и ударную устойчивость.
Источники информации
1. RU 2682141 С1 (Акционерное общество "Вологодский оптико-механический завод" (АО "ВОМЗ")), 14.03.2019, весь документ - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПАНОРАМНЫЙ ПРИБОР НАБЛЮДЕНИЯ КОМАНДИРА | 2018 |
|
RU2682141C1 |
| ПРИБОР ПАНОРАМНЫЙ | 2018 |
|
RU2708535C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА | 1999 |
|
RU2165582C2 |
| КОМБИНИРОВАННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2389041C2 |
| Оптико-электронный комплекс для оптического обнаружения, сопровождения и распознавания наземных и воздушных объектов | 2020 |
|
RU2760298C1 |
| ЗЕНИТНАЯ САМОХОДНАЯ УСТАНОВКА | 2007 |
|
RU2348890C2 |
| КОРАБЕЛЬНАЯ ПУСКОВАЯ УСТАНОВКА | 2004 |
|
RU2256582C1 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМ СНАРЯДОМ С ЛАЗЕРНОЙ ПОЛУАКТИВНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2019 |
|
RU2737634C2 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА УПРАВЛЕНИЯ КОРАБЕЛЬНОЙ АРТИЛЛЕРИЙСКОЙ УСТАНОВКОЙ | 2024 |
|
RU2828168C1 |
| СЛЕДЯЩАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2381524C1 |
Изобретение относится к области оптико-электронной техники, в частности к устройствам наблюдения и прицеливания. Заявленный оптический блок состоит из оптически сопряженного оптического элемента вертикального наведения и телевизионного канала, включающего объектив и матричное фотоприемное устройство, а также модуля управления, гироскопического датчика, закрепленного на корпусе оптического блока и электрически связанного с модулем управления. При этом оптический элемент вертикального наведения установлен с возможностью поворота вокруг вертикальной оси, ортогональной линии визирования телевизионного канала, посредством кинематической связи с электроприводом вертикального наведения с механизмом арретирования и датчиком угла вертикального наведения. Электропривод вертикального наведения с механизмом арретирования и датчик угла вертикального наведения электрически связаны с модулем управления. В качестве оптического элемента вертикального наведения используется призма АР-90° или плоское зеркало. Техническим результатом является повышение точности наведения линии визирования. 1 з.п. ф-лы, 3 ил.
1. Оптико-электронный прибор целеуказания, содержащий электронный блок и оптический блок, включающий в себя телевизионный канал, состоящий из оптически сопряженного объектива и матричного фотоприемного устройства, электрически связанного с электронным блоком, выход которого имеет возможность подключения к внешним устройствам, а также электропривод вертикального наведения с механизмом арретирования, датчик угла вертикального наведения, электропривод горизонтального наведения, датчик угла горизонтального наведения, гироскопический датчик и модуль управления, электрически связанный с электронным блоком, при этом датчик угла вертикального наведения, датчик угла горизонтального наведения, электропривод вертикального наведения с механизмом арретирования и электропривод горизонтального наведения электрически связаны с модулем управления, отличающийся тем, что содержит амортизационно-демпфирующую раму, состоящую из амортизационного подвеса и параллелограммного механизма, образованного подвижной и неподвижной платформами, соединенными между собой посредством рычажного механизма с промежуточной тягой, оптический блок и электронный блок выполнены в едином герметичном корпусе с защитным стеклом и образуют оптико-электронный блок, жестко связанный с подвижной платформой амортизационно-демпфирующей рамы, оптический блок установлен в горизонтальных осях оптико-электронного блока с возможностью поворота вокруг горизонтальной оси посредством кинематической связи с электроприводом горизонтального наведения и датчиком угла горизонтального наведения, перед объективом расположен оптический элемент вертикального наведения, предназначенный для изменения направления визирной оси телевизионного канала и установленный с возможностью поворота вокруг вертикальной оси, ортогональной линии визирования телевизионного канала, посредством кинематической связи с электроприводом вертикального наведения с механизмом арретирования и датчиком угла вертикального наведения, при этом в качестве оптического элемента вертикального наведения может использоваться призма АР-90° или плоское зеркало, в качестве гироскопического датчика используется гироскоп, изготовленный по технологии МЭМС, закрепленный на корпусе оптического блока и электрически связанный с модулем управления.
2. Оптико-электронный прибор целеуказания по п. 1, отличающийся тем, что в оптико-электронный блок введены нагреватель, электрически связанный с электронным блоком, и датчик температуры, расположенный на защитном стекле и электрически связанный с нагревателем.
| ПАНОРАМНЫЙ ПРИБОР НАБЛЮДЕНИЯ КОМАНДИРА | 2018 |
|
RU2682141C1 |
| ПРИБОР НАБЛЮДЕНИЯ-ПРИЦЕЛ СО ВСТРОЕННЫМ ПАССИВНЫМ ДАЛЬНОМЕРОМ | 2021 |
|
RU2785957C2 |
| Командирский прицельно-наблюдательный комплекс | 2015 |
|
RU2613767C2 |
| ПРИЦЕЛ-ПРИБОР НАВЕДЕНИЯ С ЛАЗЕРНЫМ ДАЛЬНОМЕРОМ | 2011 |
|
RU2464601C1 |
| US 11415801 B2, 16.08.2022. | |||

