Изобретение относится к транспортной технике, в частности к инфраструктурному оборудованию для запуска и эксплуатации беспилотных летательных аппаратов с вертикальным взлетом и посадкой [B60L53/30 B64F1/00 B64C27/08].
Из уровня техники известна АВТОМАТИЧЕСКАЯ АЭРОДРОМНАЯ СИСТЕМА ДЛЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА [CN 205891275 U, опубл. 2017-01-18], содержащая консоль, антенну беспроводной связи, перрон, платформу для обработки грузов и платформу для замены аккумуляторов, при этом платформа для обработки грузов включает в себя первый погрузочный рычаг и хранилище. Платформа для замены аккумуляторов содержит второй загрузочно-разгрузочный рычаг, плату для зарядки аккумулятора и бункер для хранения аккумулятора. Консоль электрически связана с антенной беспроводной связи, датчиком давления в фартуке, первым загрузочным рукавом и вторым загрузочным рукавом соответственно.
Недостатком аналога является небольшая степень автономности использования беспилотного летательного аппарата.
Также из уровня техники известно НЕОБСЛУЖИВАЕМОЕ РАБОЧЕЕ МЕСТО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА [CN 209700970 U, опубл. 2019-11-29], содержащее кузов-фургон и беспилотный летательный аппарат, размещенный в корпусе-фургоне, в корпусе-фургоне размещена электрическая подъемная платформа, в месте взлета и посадки электрической подъемной платформы размещен инфракрасный излучатель; на беспилотном летательном аппарате размещена спутниковая система позиционирования; инфракрасный приемник расположен в нижней части беспилотного летательного аппарата; беспилотный летательный аппарат управляется на взлет и посадку в фиксированной точке с помощью инфракрасных сигналов и спутниковой системы позиционирования. В верхнем торце кузова-фургона расположены две открывающиеся в относительном сдвижном режиме люковые крышки, расположены панели солнечных батарей на верхних поверхностях крышек люков, а на корпусе фургона дополнительно размещена система метеорологической связи, включающая в себя антенну, датчик температуры и влажности, датчик скорости ветра и поворотную камеру наблюдения.
Недостатком данного аналога также является небольшая степень автономности использования беспилотного летательного аппарата.
Наиболее близким по технической сущности заявленному изобретению является АНГАР ДЛЯ ДРОНОВ [KR 101975397 B1, опубл. 2019-05-07], который содержит: левую и правую двери, содержащие левую и правую цепи, соединенные так, чтобы они располагались друг напротив друга и перемещались в горизонтальном и вертикальном направлениях вокруг цепной звездочки при вращении двигателя в прямом или обратном направлении, а также заслонку, соединенную с левой и правой цепями через крепление. Двери открываются или закрываются на левую и правую стороны в соответствии с сигналом открытия и закрытия при взлете или посадке дрона. Взлетно-посадочная платформа, соединенная с левой и правой цепями через крепление и кронштейн, которые должны подниматься и опускаться в связи с движением левой и правой дверей, чтобы дрон мог взлетать и садиться. Если двигатель вращается нормально по дистанционному сигналу, когда дрон взлетает или приземляется, цепи, соединенные со звездочкой, перемещаются, а левая и правая дверцы, соединенные с цепью через крепление и скобу, открываются влево и вправо. При этом взлетно-посадочная площадка поднята, чтобы дрон мог взлететь или приземлиться на взлетно-посадочную платформу через открытые левую и правую двери, а затем, если двигатель вращается в обратном направлении, цепи перемещаются в другую сторону, а левая и правая двери закрываются. Таким образом, дрон можно вынуть и убрать обратно в ангар, что обеспечивает безопасный взлет и посадку.
Основной технической проблемой прототипа является невозможность обеспечения значительной степени автономности использования беспилотного летательного аппарата.
Задача изобретения заключается в устранении недостатков прототипа.
Технический результат изобретения заключается в обеспечении возможности достижения значительной степени автономности использования беспилотного летательного аппарата с вертикальным взлетом и посадкой. Кроме того, еще одним аспектом технического результата настоящего изобретения является значительное сокращение времени необходимого для запуска дрона.
Технический результат достигается за счет того, что многофункциональный бокс для беспилотного летательного аппарата с вертикальным взлетом и посадкой, содержащий посадочную платформу и крышу, при этом крыша выполнена в виде сдвижных створок, которые имеют возможность автоматического раскрытия при приближении к боксу беспилотного летательного аппарата, а внутреннее пространство бокса выполнено с возможностью поддержания заданной температуры и влажности.
В частности, поддержание заданной температуры выполнено посредством системы подогрева воздуха.
В частности, определение приближения беспилотного летательного аппарата к боксу осуществляется посредством измерения уровня радиосигнала беспилотного летательного аппарата.
В частности, сдвижные створки крыши выполнены с подогревом.
В частности, бокс содержит по меньшей мере одно вентиляционное отверстие.
В частности, бокс содержит метеостанцию.
В частности, на посадочной платформе выполнены контактные площадки для зарядки аккумулятора беспилотного летательного аппарата, либо на посадочной платформе размещена беспроводная система зарядки беспилотного летательного аппарата.
В частности, бокс выполнен с возможностью самодиагностики своего оборудования, а также с возможностью диагностики беспилотного летательного аппарата.
В частности, сдвижные створки выполнены с возможностью принудительного раскрытия по команде оператора.
В частности, бокс выполнен с возможностью размещения в нем более одного беспилотного летательного аппарата.
Краткое описание чертежей.
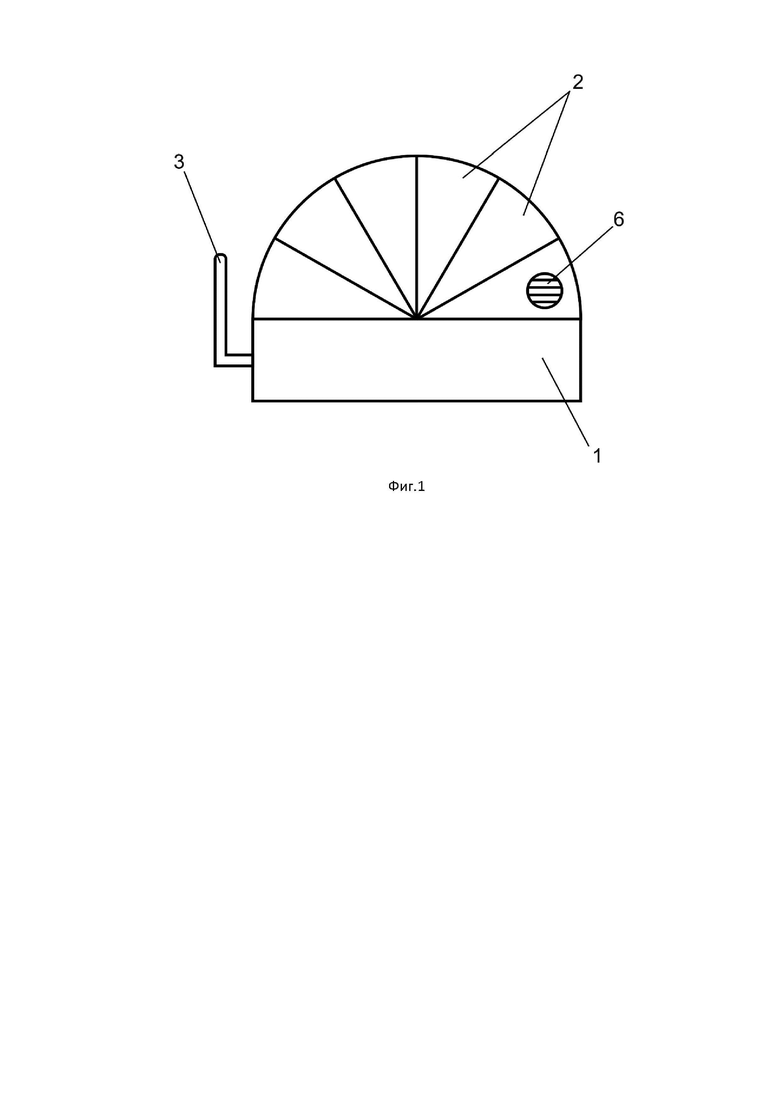
На фиг. 1 показан бокс сбоку в закрытом состоянии.
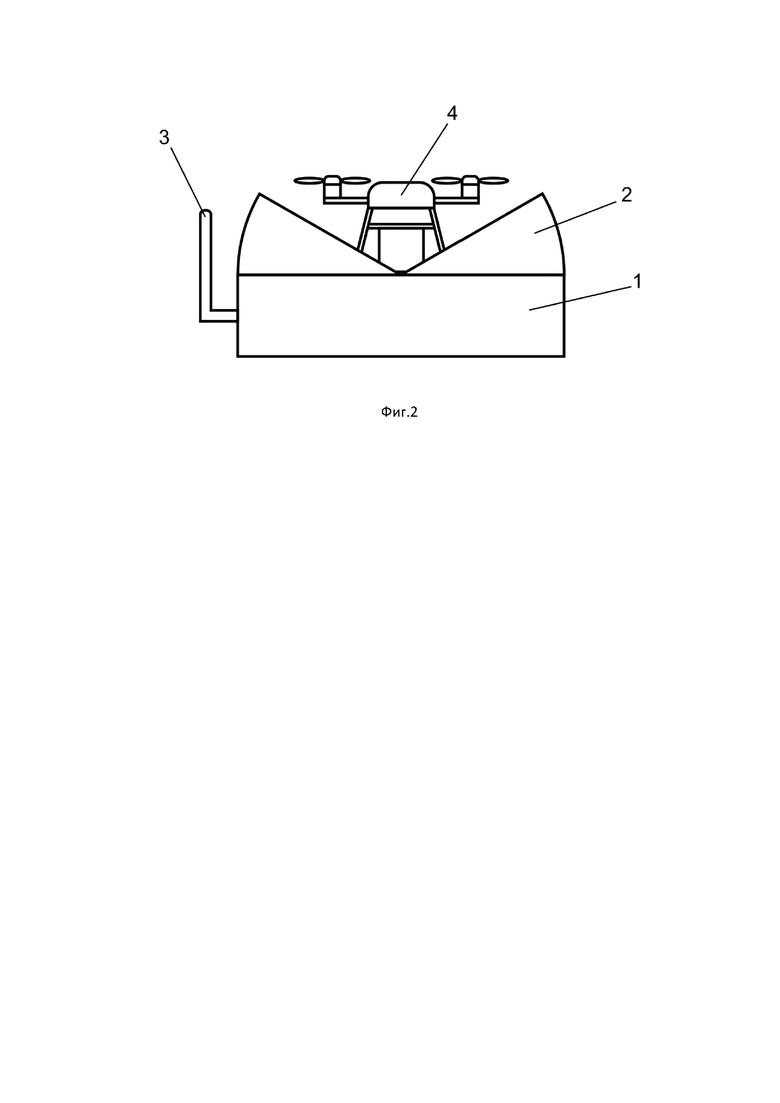
На фиг. 2 показан бокс сбоку в открытом состоянии.
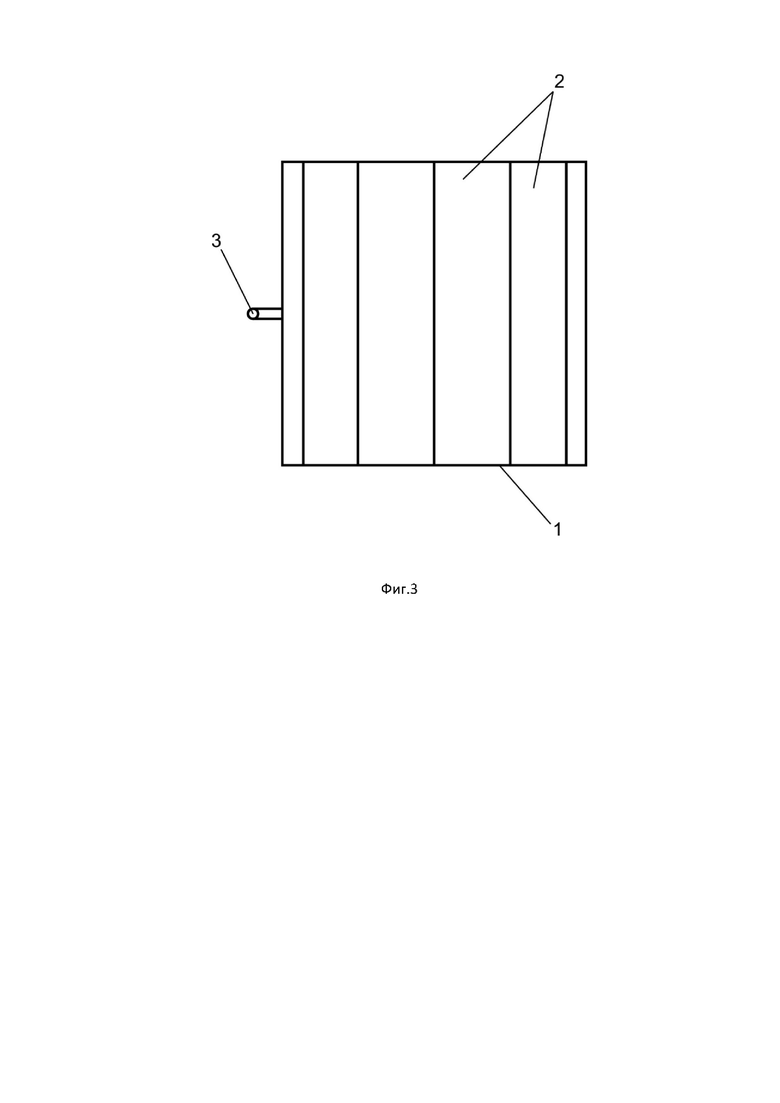
На фиг. 3 показан бокс сверху в закрытом состоянии.
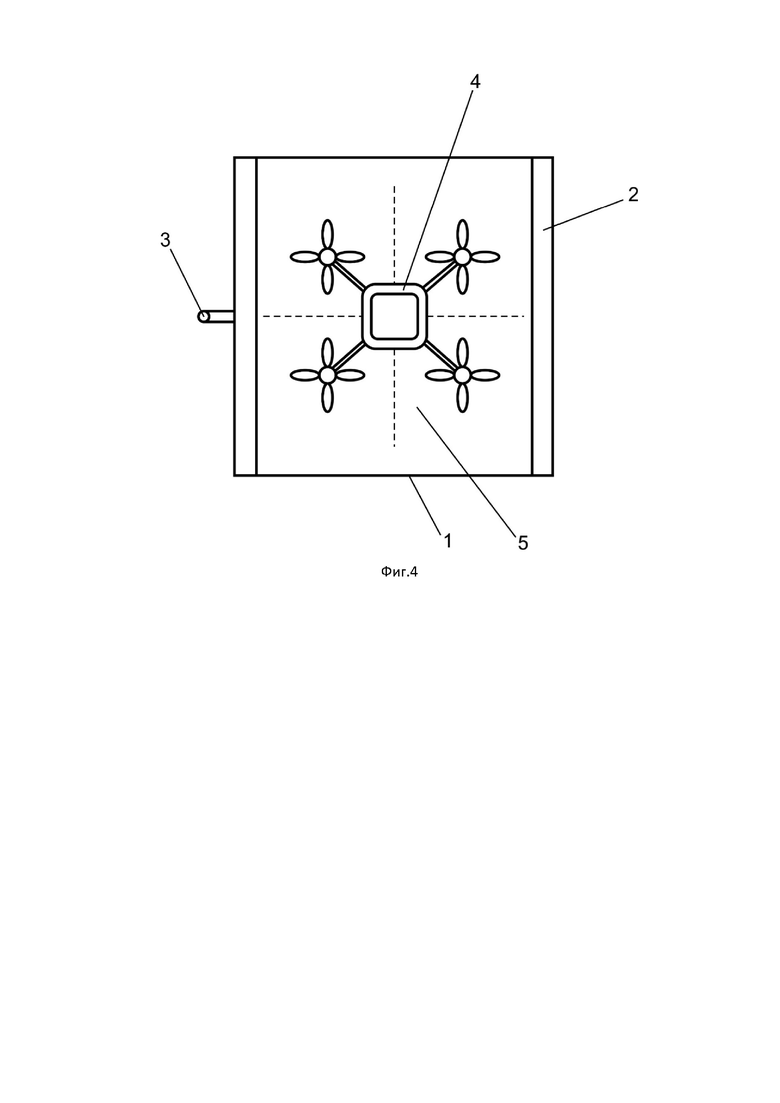
На фиг. 4 показан бокс сверху в открытом состоянии.
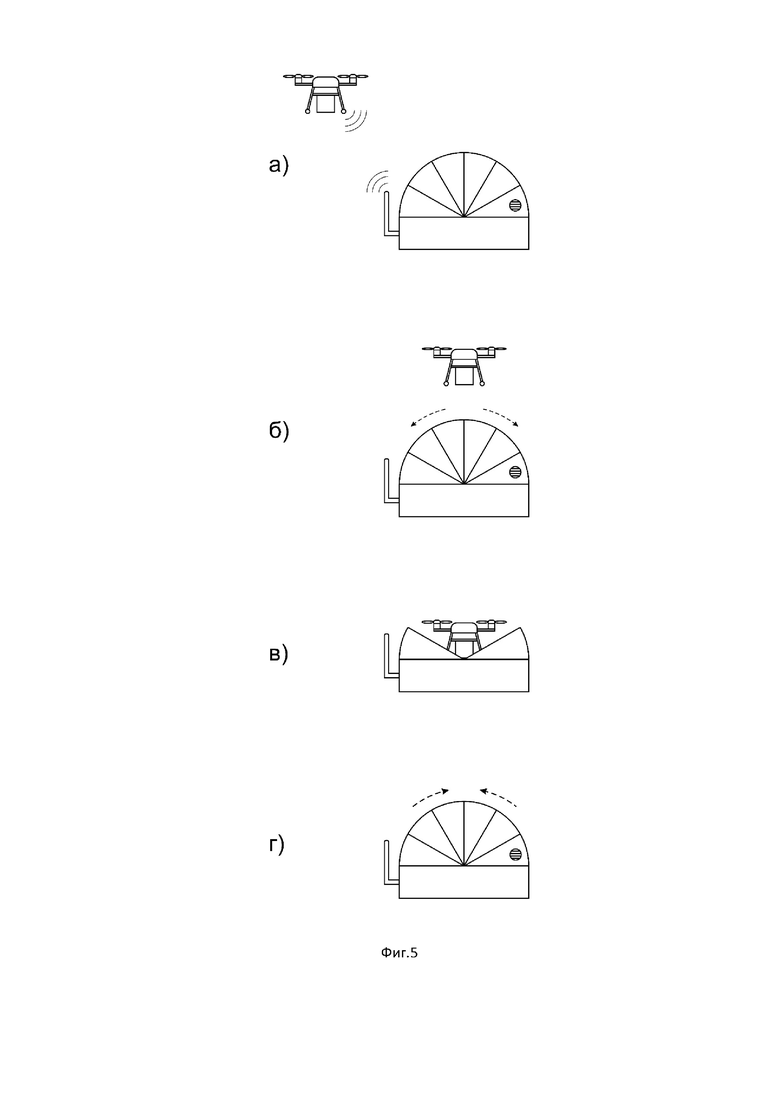
На фиг. 5 показана схема работы бокса.
На фигурах показано: 1 - многофункциональный бокс, 2 - сдвижные створки крыши, 3 - антенна, 4 - беспилотный летательный аппарат (дрон), 5 - посадочная платформа, 6 - вентиляционное отверстие.
Беспилотные летательные аппараты с вертикальным взлетом и посадкой находят все большее применение в различных отраслях и сферах деятельности человека. В частности, дроны могут применяться для обследования сельскохозяйственных угодий, ЛЭП и их опор, различных производственных строений, труб, мачт, мостов, иных объектов инфраструктуры и прочего. При этом современные беспилотные летательные аппараты способны в автоматическом режиме совершать облеты объектов и в автоматическом режиме собирать информацию об их состоянии. Также беспилотные летательные аппараты могут управляться удаленно через интернет.
Однако для запуска дрона, а также для его обслуживания, зарядки аккумулятора и прочего необходимо непосредственное участие человека. С целью автоматизации этих процессов ведутся разработки по внедрению боксов для дронов, позволяющих запускать их в автоматическом режиме.
Такие боксы могут устанавливаться на крышах зданий или на автомобилях и служат площадкой для запуска беспилотных летательных аппаратов с вертикальным взлетом и посадкой. Однако существующие решения имеют ряд недостатков, а именно:
- при вылете дрона крыши боксов остаются открытыми, из-за чего в них могут попадать атмосферные осадки;
- влага, попавшая во внутреннее пространство бокса, вызывает коррозию металлических частей бокса и/или припаркованного дрона;
- поскольку на беспилотных летательных аппаратах используются химические источники тока (как правило это литий-ионные аккумуляторы), то их емкость во многом зависит от их температуры, так как от нее зависит скорость протекания химических реакций в химических источника тока, а, следовательно, в холодную погоду время полета может быть до двух раз меньше, чем в теплую; кроме того, эксплуатация холодного аккумулятора значительно сокращает срок его службы.
Указанные факторы в итоге значительно сокращают степень автономности использования дронов, поскольку увеличивают частоту обслуживания бокса и летательного аппарата.
Данное изобретение в значительной степени решает указанные проблемы.
Настоящий многофункциональный бокс для беспилотного летательного аппарата может быть установлен на крыше здания или на транспортном средстве, таком как автомобиль, морское или воздушное судно. Установка бокса позволяет зафиксировать начальную для дрона точку «Дом». Данная точка является опорной для беспилотного летательного аппарата, на которую он возвращается при активации функции «Домой» - это происходит либо после выполнения полетного задания, либо в случае экстренной ситуации (неисправность дрона или потеря связи). Кроме того, беспилотный летательный аппарат может возвращаться на точку «Дом» по команде от оператора.
При этом многофункциональный бокс может иметь встроенную систему глобальной спутниковой навигации для автоматической установки и корректировки координат точки «Дом».
Также многофункциональный бокс имеет посадочную платформу 5, предназначенную для взлета с нее и посадки на нее беспилотного аппарата 4, при этом посадочная платформа 5 может иметь площадь, достаточную для посадки на нее нескольких дронов 4. На посадочной платформе 5 имеются контактные площадки (на фиг. не показано) для зарядки аккумулятора дрона. Ответная часть контактных площадок (токосъемные наконечники) может располагаться на ножках беспилотного летательного аппарата. Либо же на платформе может быть размещена система для беспроводной зарядки беспилотного аппарата с помощью индукционных катушек.
Дополнительно посадочная платформа 5 может быть оснащена электромагнитным захватом для более точной посадки и удержания дрона. (Здесь необходимо отметить, что конструктивные особенности дронов не являются предметом настоящего изобретения, а, следовательно, конструктивные особенности контактных площадок и/или средств удержания летательных аппаратов могут иметь различную реализацию).
Сверху многофункционального бокса имеется крыша, выполненная в виде сдвижных створок 2. Крыша и посадочная платформа 5 образуют внутреннее пространство бокса 1, а сдвижные створки 2 позволяют открывать и закрывать это внутреннее пространство.
На фиг. 5 показана схема работы сдвижных створок 2:
а) Дрон 4 подлетает к боксу 1, который посредством радиоволнового излучения определяет близость дрона.
б) После определения наличия поблизости дрона 4 бокс 1 передает ему команду о возможности посадки, для чего створки крыши 2 раздвигаются в стороны, а дрон занимает позицию над боксом.
в) После полного открытия створок крыши 2 бокс 1 передает команду дрону 4, который осуществляет посадку на посадочную платформу 5.
г) Когда летательный аппарат 4 встает своими зарядными контактами на зарядные контакты посадочной платформы 5, бокс 1 фиксирует посадку дрона 4 и закрывает створки крыши 2.
При этом определение факта нахождения поблизости дрона 4 может быть осуществлено путем измерения боксом 1 уровня радиоволнового сигнала, исходящего от летательного аппарата 4. Так, например, сдвижные створки 2 могут открываться при уровне радиосигнала дрона - 30 dBm и выше.
Кроме того, сдвижные створки 2 могут открываться и закрываться в ручном режиме, то есть принудительно по команде оператора.
Во время нахождения летательного аппарата 4 в боксе 1 во внутреннем пространстве бокса 1 поддерживается необходимая температура (15-20°C) и влажность. Это делается для того, чтобы поддерживать аккумуляторную батарею и электрическую часть дрона 4 в оптимальном рабочем состоянии.
Для определения необходимой температуры используется встроенная компактная метеостанция, которая определяет температуру внешней среды, и уже с учетом нее включается обогрев внутреннего пространства. При этом во избежание образования парникового эффекта во внутреннем пространстве бокса 1 и, соответственно, для предотвращения перегрева дрона 4 осуществляется его активное вентилирование (проветривание). Вентиляция внутреннего пространства осуществляется через вентиляционное отверстие 6, которое может открываться и закрываться. Кроме того, в вентиляционном отверстии 6 может быть установлен вентилятор для осуществления принудительной вентиляции.
Вентиляция внутреннего пространства также необходима в том случае, если летательный аппарат попал под дождь (снег), или если осадки попали во внутреннее пространство бокса во время открытия крыши. Наличие активной вентиляции внутреннего пространства бокса 1 позволяет исключить накопление влаги на металлических частях дрона 4 или бокса 1, увеличивая тем самым срок их службы.
Помимо определения температуры окружающего воздуха и наличия осадков, метеостанция может использоваться для определения направления и силы ветра. В случае сильного шквалистого ветра бокс 1 может заблокировать открытие сдвижных шторок 2, заблокировав тем самым вылет дрона 4.
Также бокс 1 может выполнять функции базовой станции для летательного аппарата 4. Постоянная радиосвязь с летательным аппаратом 4 позволяет получать как основную информацию (данные с обычной камеры, данные с инфракрасной камеры и пр.), так и служебную информацию о нем (диагностическую информацию, информацию о состоянии двигателей дрона, его аккумулятора и пр.). Связь с летательным аппаратом осуществляется через внешнюю антенну 2.
Для предотвращения обледенения крыши бокса, а также сброса с нее снега сдвижные шторки 2 могут дополнительно оснащаться системой подогрева, которая может быть выполнена на базе нагревательного провода из углеродного волокна.
Пример 1 осуществления изобретения.
Для периодического обследования производственного предприятия площадью примерно 300 000 кв.м в Курской области на одном из зданий был установлен бокс, изготовленный в соответствии настоящим изобретением. Бокс был выполнен из ABS пластика толщиной 2 мм, а габариты его составили 90 на 80 см.
На посадочную платформу была нанесена цветовая разметка для точного наведения дрона посредством системы машинного зрения летательного аппарата.
Внутри герметичного отсека был установлен блок питания и микрокомпьютер Raspberry Pi, к которому был подключен внешний блок метеостанции DAVIS Instruments Vantage Pro2 6152CEU, GPS антенна, радиомодуль для связи с дроном и силовой блок для управления электроприводом сдвижных шторок, системы подогрева воздуха, электропривода открытия вентиляционного отверстия и вентилятора. Кроме того, микрокомпьютер Raspberry Pi был подключен к локальной сети предприятия посредством кабеля Ethernet.
Для питания всей слаботочной и силовой электроники, а также для зарядки аккумулятора беспилотного аппарата бокс был подключен к стандартной однофазной сети 220 В.
В служебную память дрона был загружен набор полетных заданий для облета и фотографирования различных производственных строений и сооружений. После выполнения каждого полетного задания беспилотный аппарат, уже находясь на парковке в боксе, передавал посредством радиосвязи фото- и видео материалы, полученные при выполнении полетного задания, во внутреннюю память микрокомпьютера Raspberry Pi. Затем эта информация передавалась через локальную сеть на локальный сервер предприятия.
Количество вылетов дрона составляло от 1 до 3 в день, в зависимости от погодных условий и специфики полетных заданий.
В итоге данный опытный образец находился в полностью автономном использовании на территории производственного предприятия с 25.02.2022 до 07.08.2022. Данный срок автономной работы значительно превысил срок автономной работы всех существующих аналогов.
В случае серийного выпуска многофункционального бокса срок полностью автономного использования может быть увеличен в несколько раз.
Пример 2 осуществления изобретения.
Для визуального обследования периметра этого же предприятия было разработано решение, аналогичное раскрытому в примере 1. Отличие заключалось в том, что в данном случае дрон запускался оператором вручную и сам облет территории также совершался оператором в ручном режиме.
Когда на пульт охраны приходил сигнал о нарушении периметра предприятия, то оператор запускал беспилотный летательный аппарат для визуального обследования зоны нарушения периметра. После изучения обстановки оператор активировал режим «возврат домой» и дрон автоматически возвращался в бокс. При этом дрон имел возможность удаленного управления, в том числе через сеть Интернет.
Поскольку каждый раз перед вылетом дрон находился в боксе с полностью заряженным аккумулятором и в оптимальном рабочем состоянии, то настоящий многофункциональный бокс позволил значительно сократить время запуска дрона, увеличив тем самым оперативность реагирования в случае возникновения нештатных ситуаций.
Таким образом, за счет того, многофункциональный бокс для беспилотного летательного аппарата с вертикальным взлетом и посадкой содержит посадочную платформу и крышу, при этом крыша выполнена в виде сдвижных створок, которые имеют возможность автоматического раскрытия при приближении к боксу беспилотного летательного аппарата, а внутреннее пространство бокса выполнено с возможностью поддержания заданной температуры и влажности обеспечивается достижение следующих технических результатов: быстрый запуск дрона; повышение надежности эксплуатации дрона; повышение степени автономности использования дрона.
| название | год | авторы | номер документа |
|---|---|---|---|
| Станция автоматической замены аккумуляторов для беспилотных летательных аппаратов (БПЛА) | 2019 |
|
RU2723267C1 |
| Система автоматической дозаправки беспилотного летательного аппарата | 2020 |
|
RU2757400C1 |
| Стартовый контейнер | 2018 |
|
RU2678381C1 |
| Система посадки беспилотного летательного аппарата вертикального взлета и посадки | 2017 |
|
RU2666975C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ КОМПЛЕКС | 2022 |
|
RU2798159C1 |
| Система посадки беспилотного летательного аппарата вертикального взлета и посадки | 2024 |
|
RU2837679C1 |
| СПОСОБ И СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДРОНОМ | 2018 |
|
RU2714977C1 |
| Автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов и беспилотный летательный аппарат, работающий совместно с ней | 2019 |
|
RU2721048C1 |
| Многоразовый модульный трансатмосферный аппарат | 2022 |
|
RU2787063C1 |
| Конвертируемый летательный аппарат | 2019 |
|
RU2723104C1 |
Изобретение относится к оборудованию для беспилотных летательных аппаратов. Многофункциональный бокс (1) для беспилотного летательного аппарата с вертикальным взлетом и посадкой содержит посадочную платформу и крышу (2). Крыша (2) выполнена в виде сдвижных створок, которые имеют возможность автоматического раскрытия при приближении к боксу беспилотного летательного аппарата при помощи измерения уровня радиосигнала беспилотного летательного аппарата. Внутреннее пространство бокса (1) выполнено с возможностью поддержания заданной температуры и влажности. Бокс (1) содержит вентиляционное отверстие (6), которое может открываться и закрываться. Достигается повышение автономности использования беспилотного летательного аппарата с вертикальным взлетом и посадкой. 7 з.п. ф-лы, 5 ил.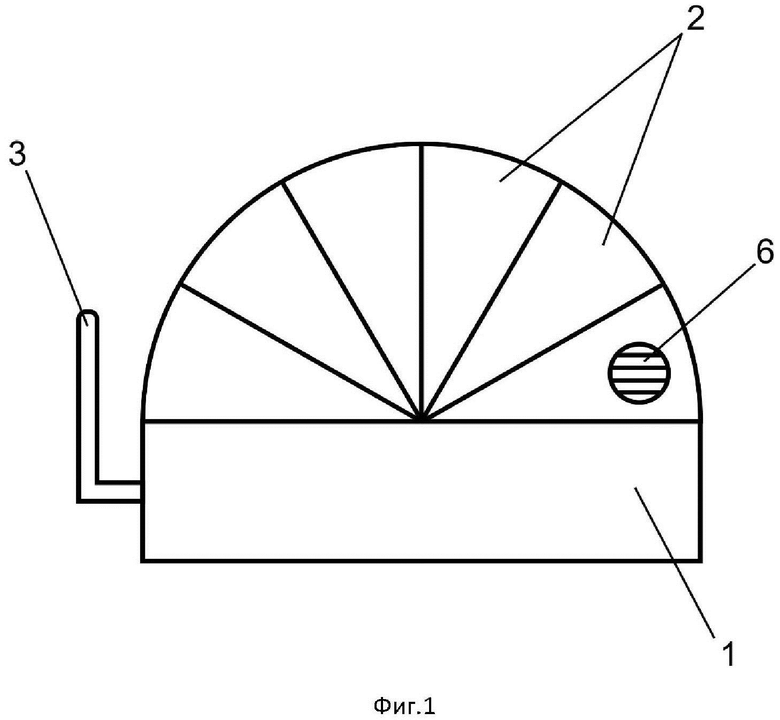
1. Многофункциональный бокс для беспилотного летательного аппарата с вертикальным взлетом и посадкой, содержащий посадочную платформу и крышу, при этом крыша выполнена в виде сдвижных створок, которые имеют возможность автоматического раскрытия при приближении к боксу беспилотного летательного аппарата, причём это приближение определяется посредством измерения уровня радиосигнала беспилотного летательного аппарата, а внутреннее пространство бокса выполнено с возможностью поддержания заданной температуры и влажности, кроме того, бокс содержит вентиляционное отверстие, которое может открываться и закрываться.
2. Бокс по п.1, отличающийся тем, что поддержание заданной температуры выполнено посредством системы подогрева воздуха.
3. Бокс по п.1, отличающийся тем, что сдвижные створки крыши выполнены с подогревом.
4. Бокс по п.1, отличающийся тем, что содержит метеостанцию.
5. Бокс по п.1, отличающийся тем, что на посадочной платформе выполнены контактные площадки для зарядки аккумулятора беспилотного летательного аппарата либо на посадочной платформе размещена беспроводная система зарядки беспилотного летательного аппарата.
6. Бокс по п.1, отличающийся тем, что выполнен с возможностью самодиагностики своего оборудования, а также с возможностью диагностики беспилотного летательного аппарата.
7. Бокс по п.1, отличающийся тем, что сдвижные створки выполнены с возможностью принудительного раскрытия по команде оператора.
8. Бокс по п.1, отличающийся тем, что выполнен с возможностью размещения в нем более одного беспилотного летательного аппарата.
| Dronehub.ai datasheet Autonomous all terrain hubs, industrial drones and AI-powered drone operations for inspection and deliveries | |||
| Способ регенерирования сульфо-кислот, употребленных при гидролизе жиров | 1924 |
|
SU2021A1 |
| US2021276735 A1, 09.09.2021 | |||
| US2020410872 A1, 31.12.2020 | |||
| US20210394930 A1, 23.12.2021 | |||
| БАЗОВАЯ СТАНЦИЯ ДЛЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2723689C1 |
| 0 |
|
SU194136A1 | |

