Электропривод подводного аппарата относится к устройствам, обеспечивающим передвижение в водной среде автономных средств, и может быть использован как движитель автономных средств в надводном и подводном положениях.
Известно устройство торпеды по патенту №3145678, от 25 августа 1964 г., США, имеющей герметичный корпус, в котором расположен электродвигатель с двумя выходными валами, обеспечивающими встречное вращение двух приводных винтов, установленных в хвостовой части торпеды. Для снижения излучаемых торпедой шумов и вибраций электродвигатель установлен в корпусе через специальные шумо- и вибропоглощающие прокладки.
Недостатками указанного технического решения являются отсутствие возможности регулирования параметров питания электродвигателя и, как следствие, отсутствие возможности влиять на шумовые и вибрационные характеристики электродвигателя и торпеды в целом посредством целенаправленного изменения параметров питающего напряжения электродвигателя.
Известно устройство электропривода подводного аппарата, взятого за прототип, имеющего герметичный корпус, в котором установлен коллекторный электродвигатель с возбуждением от постоянных магнитов, имеющий два соосных встречно вращающихся вала, которые за пределами корпуса непосредственно приводят во вращение винты. Двигатель питается от аккумулятора, имеет комплекты щеток для подачи электрического напряжения на вращающиеся части электродвигателя и систему совмещенных со щетками балансировочных противовесов. Система управления работой двигателя находится в отдельном герметичном устройстве за пределами герметичного корпуса с двигателем (США, патент №2010/0003871 А1 от 07.01.2010 г.).
Недостатками данного технического решения являются низкая надежность устройства, обусловленная применением коллекторного электродвигателя со скользящими силовыми контактами - щеточно-коллекторным узлом, значительно снижающим надежность электродвигателя и устройства в целом, а также размещение системы управления работой электродвигателя в виде удаленного герметичного самостоятельного устройства, что увеличивает общие габариты рассматриваемого устройства и снижает его помехозащищенность и надежность. При использовании источника питания ограниченной энергоемкости, например аккумуляторной батареи, применение коллекторного электродвигателя, имеющего низкий коэффициент полезного действия, снижает дальность автономного хода подводного аппарата.
Целью изобретения является создание надежного электропривода подводного аппарата с низким уровнем шума и вибраций и повышенной дальностью автономного хода.
Поставленная цель достигается тем, что в электроприводе подводного аппарата, содержащем обтекаемый водой герметичный корпус, в котором размещены источник питания и установленный через вибропоглощающие прокладки электродвигатель с двумя соосными выходными валами, которые за пределами герметичного корпуса аппарата непосредственно приводят во вращение винты встречного вращения, согласно изобретению электродвигатель содержит расположенные в корпусе два неподвижных статора с многофазными обмотками и два вращающихся во встречных направлениях ротора, в герметичном корпусе дополнительно расположен инвертор для питания обмоток электродвигателя, силовые полупроводниковые модули инвертора размещены на внутренней стороне герметичного корпуса с возможностью рассеивания в окружающей воде потерь мощности модулей посредством теплового контакта их теплорассеивающих поверхностей с герметичным корпусом подводного аппарата, при этом обмотки электродвигателя подключены к источнику питания через силовые полупроводниковые модули инвертора.
Кроме того, в специальных полостях ротора размещены постоянные магниты.
Кроме того, каждый ротор размещен на втулке со сквозными осевыми каналами, на торцевых частях роторов расположены вентиляционные лопатки, а в корпусе электродвигателя выполнены три ряда радиальных отверстий, причем один ряд расположен между статорами, второй ряд - со стороны винтов и третий - с противоположной от винтов стороны электродвигателя.
Кроме того, многофазные обмотки каждого статора и подключенные к ним силовые полупроводниковые модули инвертора разделены на две или более группы, подсоединенные к источнику питания.
В дальнейшем изобретение поясняется конкретным примером выполнения со ссылкой на чертежи, на которых показаны:
- Фиг.1 - общий вид устройства.
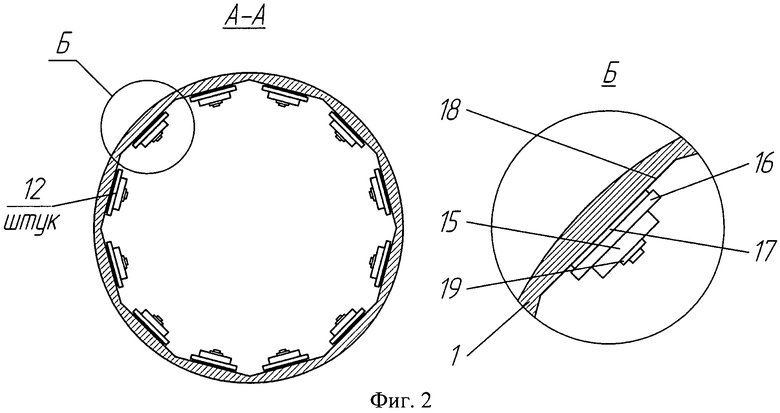
- Фиг.2 - поперечное сечение устройства в зоне размещения силовых полупроводниковых модулей инвертора.
- Фиг.3 - поперечное сечение устройства в зоне электродвигателя.
- Фиг.4 - варианты схемы соединения обмоток двигателя с силовыми полупроводниковыми модулями инвертора.
Электропривод подводного аппарата (Фиг.1) включает в себя герметичный металлический корпус 1, в котором размещены источник питания 2 и электродвигатель 3, установленный в нем через вибропоглощающие прокладки 4. Электродвигатель имеет установленные в корпусе 3 два статора 5 и 6 и два ротора 7 и 8, установленных на соосных валах 9 и 10. На выходных концах валов 9 и 10 через промежуточную муфту 11 за пределами герметичного корпуса 1 установлены винты 12 и 13 встречного вращения. В герметичном корпусе 1 размещен также инвертор 14 с силовыми полупроводниковыми модулями 15.
На внутренней поверхности герметичного корпуса 1 подводного аппарата (Фиг.2) размещены силовые полупроводниковые модули 15 инвертора 14. Модули 15 размещаются таким образом, чтобы их теплорассеивающие поверхности 16 через теплопроводящие эластичные элементы 17 были установлены на специальных контактных площадках 18 герметичного корпуса 1. Выводы 19 обмоток электродвигателя 3 (см. Фиг.1) подсоединены к силовым модулям 15.
На статоре 5 в пазах 20 размещена (Фиг.3) многофазная обмотка 21, в специальных полостях 22 ротора 7 установлены постоянные магниты 23.
Каждый ротор размещен на втулке со сквозными осевыми каналами 24 (см. Фиг.2), на торцевых частях роторов 7 и 8 расположены вентиляционные лопатки 25 и 26, а в корпусе 3 электродвигателя выполнены три ряда радиальных отверстий, причем один ряд 27 расположен между статорами, второй ряд 28 - со стороны винтов и третий 29 - с противоположной от винтов стороны электродвигателя.
Многофазные обмотки (Фиг.4) каждого из статоров 5 и 6 подключены к силовым полупроводниковым модулям инвертора. Через силовые полупроводниковые модули 15 обмотки подключены к источнику питания 2. Параллельно выводам источника питания подключен блок конденсаторов С. В корпусе подводного аппарата 1 размещен также блок управления 30 (см. Фиг.1) работой силовых полупроводниковых модулей 15.
Для питания электродвигателя большой мощности предлагается многофазные обмотки каждого из статоров 5 и 6 разделить на группы (Фиг.4,б) и подключить к силовым полупроводниковым модулям с образованием параллельных, идентичных по работе, каналов мощности.
Работает электропривод подводного аппарата следующим образом. При подаче из блока управления 30 команды на открытие силовых полупроводниковых модулей 15 на выводы обмоток подается напряжение от источника питания 2 и по обмоткам протекает многофазный ток, который создает вращающееся магнитное поле статора. Взаимодействие вращающегося поля статора с полем возбуждения постоянных магнитов 23 ротора обеспечивает создание вращающего момента. Фазные обмотки статоров 5 и 6 коммутируются полупроводниковыми модулями 15 в такой последовательности, при которой создаются встречно направленные вращающиеся поля, что обеспечивает встречное вращение роторов 7 и 8 и соответственно винтов 12 и 13. Блок конденсаторов С обеспечивает стабильность напряжения на выводах обмоток и обмен реактивной мощностью с инвертором 14.
Размещение силовых полупроводниковых модулей 15 на площадках 18 внутренней поверхности герметичного металлического корпуса 1 подводного аппарата позволяет эффективно решить задачу охлаждения модулей 15 и за счет этого минимизировать габаритные размеры инвертора 14. Для обеспечения минимального теплоперепада в месте контакта корпуса подводного аппарата 1 и модулей их теплорассеивающие поверхности 15 установлены на площадках 18 через теплопроводящие эластичные элементы 17, например термопасту.
Размещение блока управления 30 на минимальном расстоянии от силовых модулей 15 позволяет в целом уменьшить габариты электропривода и повысить его помехозащищенность и помехоизлучение.
Для возбуждения ротора 7 применена эффективная конструкция, в которой магниты 23 встраиваются в полости ротора 22 и не требуют специального крепления на роторе.
Для обеспечения охлаждения электродвигателя образованы каналы для осевой вентиляции. Охлаждающие потоки, показанные на Фиг.1 стрелками, из аксиальных каналов роторов 24 под воздействием центробежных вентиляционных лопаток 25 и 26 движутся вдоль лобовых частей обмоток статоров 5 и 6, далее проходят через радиальные отверстия 28 и 29 в корпусе электродвигателя и, отдав тепло омываемому водой корпусу подводного аппарата 1, возвращаются внутрь электродвигателя. Вибропоглощающие прокладки 4 локализуют прохождение воздушных потоков в пределах длины электродвигателя и блокируют выход подогретого воздуха в зону инвертора 14.
Питание обмоток электродвигателя может быть выполнено по схеме, показанной на Фиг.4,а. Для обеспечения питания электродвигателя большой мощности с целью снижения токов, коммутируемых модулями 15, предлагается формировать параллельные ветви из трехфазных обмоток, подключая их к отдельным модулям 15 (см. Фиг.4,б).
Положительный эффект предлагаемого изобретения состоит в повышении надежности работы и дальности хода подводного аппарата за счет применения электропривода на основе энергетически более высокоэффективного бесколлекторного электродвигателя с постоянными магнитами. Именно за счет применения электродвигателя с двумя неподвижными статорами с многофазными обмотками и двумя вращающимися во встречных направлениях роторами с постоянными магнитами удается обеспечить встречное вращение винтов при одновременном отказе от применения ненадежного щеточно-коллекторного узла. Размещение силовых полупроводниковых модулей на внутренней поверхности герметичного корпуса обеспечивает минимальный объем, занимаемый инвертором, за счет высокоэффективного отвода мощности потерь в полупроводниковых элементов и их рассеивание в окружающей аппарат воде. Применение вентиляции двигателя и отвод части выделяемых в нем потерь мощности на корпус подводного аппарата также позволяет уменьшить массу и объем, занимаемый электродвигателем.
Применение инвертора с системой управления позволяет за счет целенаправленного изменения параметров питающего напряжения на обмотках обеспечить минимальный уровень шумов и вибраций, излучаемых электродвигателем и подводным аппаратом в целом.
Разделение на параллельные каналы мощности за счет формирования независимых параллельных ветвей из трехфазных обмоток и силовых полупроводниковых модулей позволяет наращивать мощность электропривода в целом при использовании однотипных силовых полупроводниковых модулей.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЫСОКООБОРОТНЫЙ ПОДВОДНЫЙ ДВИЖИТЕЛЬ | 2024 |
|
RU2840470C1 |
| СПОСОБ ЭНЕРГООБЕСПЕЧЕНИЯ ПОДВОДНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2019 |
|
RU2724197C1 |
| ТОРПЕДНЫЙ ДИСКОВЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2014 |
|
RU2571139C2 |
| Движительный комплекс с кольцевым электродвигателем для подводных аппаратов большой автономности | 2019 |
|
RU2722873C1 |
| ПЛАВАЮЩАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2019 |
|
RU2708497C1 |
| ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ЭЛЕКТРОПРИВОД С ЭКСТРЕМАЛЬНЫМ РЕЖИМОМ РАБОТЫ | 2013 |
|
RU2540319C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ | 2015 |
|
RU2605957C1 |
| ИНВЕРТОР ДЛЯ ПИТАНИЯ МНОГОФАЗНОГО РЕАКТИВНОГО ИНДУКТОРНОГО ДВИГАТЕЛЯ | 1993 |
|
RU2037259C1 |
| ИНДУКТОРНАЯ МАШИНА С АКСИАЛЬНЫМ МАГНИТНЫМ ПОТОКОМ ДЛЯ ЖЕСТКИХ УСЛОВИЙ ЭКСПЛУАТАЦИИ | 2013 |
|
RU2539572C2 |
| Система управления и передачи вращательного момента на винт(ы) в беспилотных летательных аппаратах (БПЛА), стартер-генератор, плата управления стартером-генератором и амортизатор для этой системы | 2020 |
|
RU2741136C1 |


Изобретение относится к области водного транспорта и направлено на усовершенствование подводного аппарата, который обеспечивает передвижение в водной среде автономных средств, и может быть использовано как движитель автономных средств в надводном и подводном положениях. Электропривод подводного аппарата (Фиг.1) включает в себя герметичный корпус 1, в котором размещены источник питания 2 и электродвигатель 3. Электродвигатель имеет два статора 5 и 6 и два ротора 7 и 8, установленные на соосных валах 9 и 10, на выходных концах которых за пределами корпуса 1 размещены винты 12 и 13 встречного вращения. В корпусе 1 размещен также инвертор 14 с полупроводниковыми модулями 15, расположенными на внутренней поверхности корпуса. Модули 15 размещены таким образом, чтобы их теплопроводящие эластичные элементы 17 были установлены на контактных площадках 18 корпуса 1. Выводы 19 обмоток электродвигателя 3 подсоединены к модулям 15. На статоре 5 в пазах 20 размещена многофазная обмотка 21, в полостях 22 ротора 7 установлены постоянные магниты 23. На торцевых частях роторов 7 и 8 расположены вентиляционные лопатки 25 и 26, а в корпусе 3 электродвигателя выполнены радиальные отверстия.. Технический результат заключается в повышении надежности конструкции электропривода подводного аппарата, снижении уровня шума и вибраций и повышении дальности автономного хода. 2 з.п. ф-лы, 4 ил.
1. Электропривод подводного аппарата, содержащий обтекаемый водой герметичный корпус, в котором размещены источник питания и установленный через вибропоглощающие прокладки электродвигатель с двумя соосными выходными валами, которые за пределами герметичного корпуса аппарата непосредственно приводят во вращение винты встречного вращения, электродвигатель содержит два расположенных в корпусе неподвижных статора с многофазными обмотками и два вращающихся во встречных направлениях ротора, в герметичном корпусе дополнительно расположен инвертор для питания обмоток электродвигателя, силовые полупроводниковые модули инвертора размещены на внутренней стороне герметичного корпуса с возможностью рассеивания в окружающей воде потерь мощности модулей посредством теплового контакта их теплорассеивающих поверхностей с герметичным корпусом подводного аппарата, при этом обмотки электродвигателя подключены к источнику питания через силовые полупроводниковые модули инвертора, отличающийся тем, что каждый ротор размещен на втулке со сквозными осевыми каналами, и как минимум, на одной из торцевых частей каждого ротора расположены вентиляционные лопатки, а в корпусе электродвигателя выполнены три ряда радиальных отверстий, причем один ряд расположен между статорами, второй ряд - со стороны винтов и третий - с противоположной от винтов стороны электродвигателя.
2. Электропривод подводного аппарата по п.1, отличающийся тем, что в полостях ротора размещены постоянные магниты.
3. Электропривод подводного аппарата по п.1, отличающийся тем, что многофазные обмотки и силовые полупроводниковые модули инвертора разделены на две или более группы, подключенные к источнику питания.
| Электрический судовой двигательнодвижительный комплекс | 1969 |
|
SU463584A1 |
| ЭЛЕКТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА АВТОНОМНОГО ПОДВИЖНОГО ОБЪЕКТА | 2006 |
|
RU2346850C2 |
| EP 0786402 A2, 30.07.1997 | |||
| US 4963108 A, 16.10.1990. | |||

