Область техники
Группа изобретений относится к области транспорта и может найти свое применение для контроля зон железнодорожных переездов в целях повышения безопасности движения.
Уровень техники
Известно, что в настоящее время 98% случаев аварий на железнодорожных переездах происходят по вине водителей. В связи с этим особую значимость приобретают вопросы повышения обеспечения безопасности движения автотранспорта и поездов на переездах и исправная работа таких систем.
Из уровня техники известна автоматическая переездная сигнализация (АПС) «УРАЛ», которая специализирована с целью использования на переездах как при новом сооружении, так и при модернизации имеющихся приборов локальных устройств автоматики в переездах.
Известная система обеспечивает наблюдение свободности зон приближения к переезду, удаления от него, а также участка дороги переезда методом счета осей.
Однако устройства управления переездной сигнализацией, в которых управление средствами ограждения осуществляют с учетом координат, скорости и ускорения приближающегося поезда ограничена длиной участка приближения и имеют недостаточную надежность работы и невозможность использования на малодеятельных участках, где отсутствуют электрические стыки в рельсовых линиях [1] (ТРУНАЕВ А.М. и др. Анализ средств обеспечения безопасности на железнодорожных переездах, Сборник научных трудов ДОНИЖТ, 2021 № 63).
Кроме того, известная система обеспечивает управление средствами сигнализации и системой ограждения только на основании сведений, характеризующих движение состава, без учета поведенческих характеристик объектов (автомобилей, пешеходов, животных и т.п.), находящихся в зоне переезда и потенциально являющихся причиной возникновения нештатной ситуации на переезде.
В качестве наиболее близкого аналога предложенного решения можно принять известную из патентного документа [2] (RU 110519 U1, 20.11.2011) систему обеспечения безопасности на железной дороге, включающую компьютер, к которому подключены видеокамеры, к компьютеру дополнительно подключены тепловизоры, размещенные вдоль железнодорожного пути, а к видеокамерам прикреплены лазеры подсветки.
Известная система на основании обработки компьютером данных, полученных от средств видеонаблюдения, осуществляет управление подсистемой экстренной связи и подсистемой периметральной сигнализации.
К недостаткам известного решения можно отнести низкую функциональность, поскольку по существу в ней реализована лишь функция оповещения и не предусмотрено алгоритмов и средств, направленных на предотвращение аварийных ситуаций.
Кроме того, так же, как и рассмотренное выше решение [1], известная из [2] система не учитывает поведенческие характеристики объектов, что может приводить как к ложным срабатываниям, так и к пропуску аварийных ситуаций.
Предлагаемая группа изобретений направлена на преодоление недостатков описанного уровня техники и при своем осуществлении позволяет обеспечить ряд технических результатов, заключающихся в повышении безопасности функционирования железнодорожного переезда, повышении вероятности определения аварийной ситуации, обеспечении непрерывного контроля ситуации в режиме реального времени, оперативности принятия мер по предотвращению авариных ситуаций и повышении надежности системы.
Раскрытие изобретения
Для достижения отмеченных выше технических результатов предлагается способ автоматического контроля зоны железнодорожного переезда, включающий размещение комплекса технических и программных средств видеонаблюдения в отдельных телекоммуникационных всепогодных и вандалозащищенных шкафах в зоне железнодорожного переезда, которую на четной и нечетной сторонах оснащают системой из видеокамер в видимом и инфракрасном диапазоне, соединенных с цифровым видеорегистратором, выполняющим функцию приема, настройки и хранения видеоизображений, который соединен с компьютерным комплексом, выполняющим функции обработки видеоизображений, при этом в зоне железнодорожного переезда размещают средства светового и звукового предупреждения, осуществляют видеоконтроль зоны железнодорожного переезда, при котором методами компьютерного зрения производят обнаружение объектов, которые перемещались в контролируемой зоне железнодорожного переезда, а затем статично находятся в этой зоне заданное количество времени, которое превышает время, необходимое для пересечения зоны железнодорожного переезда при условии сохранения их прежней скорости движения, производят ранжирование объектов по количеству накопленного времени их неподвижного нахождения в контролируемой зоне железнодорожного переезда, причем, чем больше время неподвижного нахождения, тем выше ранг объекта, причем временной порог зависит от срабатывания сигнала автоматики шлагбаума и уменьшается при его закрытии, при достижении заданного ранга объекта формируют сигнал о возможной аварийной ситуации, активируют средства светового и звукового предупреждения, далее осуществляют непрерывный контроль за реакцией обнаруженного объекта на светозвуковое воздействие, выявляя четыре возможных события: объект покидает контролируемую зону железнодорожного переезда или объект не реагирует на воздействие, при включенном или выключенном сигнале автоматики шлагбаума соответственно, при этом предусматривают уровни опасности: минимальный, средний, повышенный и высокий, при повышенном уровне направляют сообщение диспетчеру и подвижному составу о факте срабатывания оповещения, при высоком уровне реализуют функцию предотвращения аварийной ситуации путем активации автотормоза состава и осуществляя его экстренное торможение.
Для реализации способа также предлагается Система автоматического контроля зоны железнодорожного переезда, включающая комплекс технических и программных средств видеонаблюдения, размещенных в зоне железнодорожного переезда в отдельных телекоммуникационных всепогодных и вандалозащищенных шкафах, систему из видеокамер в видимом и инфракрасном диапазоне на четной и нечетной сторонах железнодорожного переезда, соединенных с цифровым видеорегистратором, выполняющим функцию приема, фильтрации и хранения видеоизображений, который соединен с компьютерным комплексом, выполняющим функции обработки видеоизображений, соединенные с компьютерным комплексом средства светового и звукового предупреждения, при этом компьютерный комплекс выполнен с возможностью посредством методов компьютерного зрения обнаружения объектов, которые перемещались в контролируемой зоне железнодорожного переезда, а затем статично находятся в этой зоне заданное количество времени, которое превышает время, необходимое для пересечения зоны железнодорожного переезда при условии сохранения их прежней скорости движения, с возможностью ранжирования объектов по количеству накопленного времени их неподвижного нахождения в контролируемой зоне железнодорожного переезда, причем, чем больше время неподвижного нахождения, тем выше ранг объекта, а временной порог зависит от срабатывания сигнала автоматики шлагбаума и уменьшается при его закрытии, с возможностью формирования сигнала о возможной аварийной ситуации при достижении заданного ранга объекта, с возможностью активации средств светового и звукового предупреждения, с возможностью осуществления непрерывного контроля за реакцией обнаруженного объекта на светозвуковое воздействие, выявляя четыре возможных события: объект покидает контролируемую зону железнодорожного переезда или объект не реагирует на воздействие, при включенном или выключенном сигнале автоматики шлагбаума соответственно, при этом предусмотрены уровни опасности: минимальный, средний, повышенный и высокий, при этом компьютерный комплекс при повышенном уровне направляет сообщение диспетчеру и подвижному составу о факте срабатывания оповещения, при высоком уровне реализует функцию предотвращения аварийной ситуации путем активации автотормоза состава для его экстренного торможения.
Далее в описании представлены сведения о преимущественных вариантах осуществления изобретений, приведенных в иллюстративных целях, но объем защиты вариантов осуществления настоящего изобретения не ограничивается этим. Любой специалист в данной области техники может выявить изменения или замены в пределах технического объема вариантов осуществления настоящего изобретения, и все эти изменения или замены должны быть охвачены объемом охраны вариантов осуществления настоящего изобретения. Следовательно, объем охраны вариантов осуществления настоящего изобретения должен быть подчинен объему охраны формулы изобретения.
Осуществление изобретения
В соответствии с настоящим изобретением раскрыт способ автоматического контроля зоны железнодорожного переезда.
В общем виде способ включает в себя обнаружение объекта на переезде и определение, превышает ли время его неподвижности заранее установленный порог времени. При превышении порога генерируется сигнал активации, включающий блок световых и звуковых сигналов на железнодорожном переезде для предупреждения объекта о потенциальной опасности. В случае определения возникновения заранее заданного условия, дополнительно активируется система автоматического торможения состава.
При реализации способа на четной и нечетной сторонах переезда организуют две зоны видеонаблюдения, обеспечиваемые видеокамерами в видимом и инфракрасном диапазоне, размещенными в отдельных телекоммуникационных всепогодных и вандалозащищенных шкафах в зоне железнодорожного переезда.
Видеокамеры подключают к цифровому видеорегистратору (видеосерверу), который осуществляет прием потокового видео, его фильтрацию и хранение в течение заданного времени. Выбор типа подключения (проводное, беспроводное) осуществляется исходя из конструктивных или требуемых технологических характеристик конкретного месторасположения.
Также в предложенном способе оснащают систему компьютерным комплексом, который имеет связь с видеосервером, АРМ (автоматизированное рабочее место) диспетчера, размещенными в контролируемой зоне средствами светового и звукового предупреждения, устройствами ЖАТ (железнодорожной автоматики и телемеханики), имеющими устройства СЦБ (сигнализация, централизация и блокировка).
Способ предполагает алгоритм взаимодействия между компьютерным комплексом и существующей автоматикой переезда. Автоматика переезда генерирует сигнал о закрытии переезда, который играет важную роль в предлагаемом способе. Этот сигнал влияет на допустимый порог времени нахождения объекта в зоне переезда. Когда переезд закрыт, временной порог уменьшается, что обеспечивает более быстрое реагирование на потенциальную опасность.
В случае возникновения опасной ситуации, обнаруженной предлагаемым способом, через автоматику переезда генерируется сигнал, который передается машинисту или локомотивной бригаде и системам экстренного торможения. Этот сигнал служит для немедленного оповещения машиниста или локомотивной бригады, уведомляя его о потенциальной опасности на переезде. Кроме того, сигнал вызывает активацию систем экстренного торможения.
Посредством анализа видеоизображений, полученных от видеосервера, компьютерный комплекс методом компьютерного зрения обеспечивает обнаружение объектов, которые перемещались в контролируемой зоне железнодорожного переезда, а затем статично находятся в этой зоне заданное количество времени, которое превышает время, необходимое для пересечения зоны железнодорожного переезда при условии сохранения их прежней скорости движения, производит ранжирование объектов по количеству накопленного времени их неподвижного нахождения в контролируемой зоне железнодорожного переезда, причем чем больше время неподвижного нахождения, тем выше ранг объекта.
При достижении объектом определенного ранга (соответствующего тому времени неподвижности, которое превышает заданный временной порог), активируют средства выдачи световых и звуковых сигналов на железнодорожном переезде, предупреждая находящийся там объект о возможной опасности. При этом временной порог динамически регулируется в зависимости от наличия сигнала, указывающего на приближающийся поезд (например, сигнал автоматики шлагбаума). При наличии такого сигнала временной порог для срабатывания средств оповещения уменьшается.
В одном из вариантов осуществления, входящий в состав компьютерного комплекса блок трекинга объекта в режиме реального времени может отслеживать реакцию объекта на производимое светозвуковое воздействие, выявляя четыре возможных события:
1. Объект покидает переезд при выключенном сигнале о приближении поездного состава. Успешное завершение воздействия – минимальный уровень опасности.
2. Объект покидает переезд при включенном сигнале о приближении поездного состава. Успешное завершение воздействия – средний уровень опасности.
3. Объект не переезде не реагирует на оповещение при выключенном сигнале о приближении поездного состава. Повышенный уровень опасности. По каналообразующему оборудованию АРМ диспетчера и подвижным составам передается сообщение о наличии мешающего объекта на путях.
4. Объект не переезде не реагирует на оповещение при включенном сигнале о приближении поездного состава. Высокий уровень опасности. По каналообразующему оборудованию диспетчеру и подвижным составам передается сообщение о наличии мешающего объекта на путях. Также активируется функция предотвращения аварийной ситуации, которая реализуется путем взаимодействия блоков формирования сигнала высокого уровня опасности с существующим оборудованием автоматической локомотивной сигнализации.
В одном из альтернативных вариантов осуществления, компьютерный комплекс по результатам анализа изображений видеопотока может выявить объект, который при попадании в контролируемую зону перемещается со скоростью 4 км/ч. При нахождении в контролируемой зоне выявлено статическое положение этого объекта. Если бы объект сохранял прежнюю скорость движения, он смог бы пересечь переезд за время, равное 1 мин. При этом определено, что в данный момент система получает сигнал автоматики о приближении состава (сигнал также может содержать информацию о времени, в течение которого состав достигнет переезда), достигающего переезд в течение 2 мин. Комплекс генерирует сигнал для активации средств светозвукового воздействия, при этом осуществляя контроль реакции объекта на такое воздействие. В случае, если объект продолжает находиться в статическом состоянии, ведут подсчет времени такого состояния. Например, определено, что объект не реагирует на светозвуковые сигналы в течение 40 сек, следовательно, при возобновлении движения объекта с прежней скоростью в сторону переезда, повышается вероятность аварийной ситуации, ранг объекта переводится в соответствие повышенному уровню опасности. В режиме реального времени комплекс выявил начало движения объекта в сторону переезда, по каналообразующему оборудованию АРМ диспетчера и подвижным составам передается сообщение о наличии потенциально мешающего объекта в зоне переезда.
В другом из альтернативных вариантов осуществления, компьютерный комплекс, используя разметку зоны переезда в пространстве видеоизображения, может определять координаты находящегося в контролируемой зоне объекта. Например, комплекс выявил объект, статически находящийся непосредственно на железнодорожном пути. При этом имеется наличие сигнала о приближении поездного состава. Объект не реагирует на активированные светозвуковые сигналы. Объекту присваивается высокий ранг, соответствующий высокому уровню опасности. По каналообразующему оборудованию диспетчеру и подвижным составам передается сообщение о наличии мешающего объекта на путях. Также активируется функция предотвращения аварийной ситуации, которая реализуется путем взаимодействия блоков формирования сигнала высокого уровня опасности с существующим оборудованием автоматической локомотивной сигнализации.
Компьютерный комплекс может быть реализован в виде совокупности аппаратно-программных средств, включающих
- блок компьютерного зрения, используемый для обнаружения объектов, которые находятся в зоне переезда;
- блок слежения за перемещением объектов, которые оставались неподвижными в течение заданного времени, превышающего время, необходимое для пересечения зоны с первоначальной скоростью;
- блок ранжирования для присвоения ранга каждому обнаруженному объекту на основе накопленной продолжительности неподвижности в зоне пересечения, используя шкалу рангов;
- блок регулировки порога длительности неподвижности на основе состояния активации сигнала автоматического барьера, при этом порог уменьшается, когда сигнал присутствует;
- блок генерирования сигнала тревоги, указывающего на потенциальную аварийную ситуацию, сопровождаемого визуальными, слуховыми и речевыми индикаторами;
- петлю обратной связи для мониторинга реакции обнаруженного объекта на аудиовизуальные стимулы;
- блок классификации ситуации по одному из четырех уровней опасности на основе отслеживаемой реакции объекта;
- блок отправки сообщения диспетчеру и/или поездному составу при достижении минимального уровня опасности, сигнализирующего о включении сигнала тревоги;
- блок автоматической активации превентивных мер при максимальном уровне опасности, включая автоматическую тормозную систему поезда и выполнение процедур экстренного торможения с использованием существующего автоматического локомотивного сигнального оборудования.
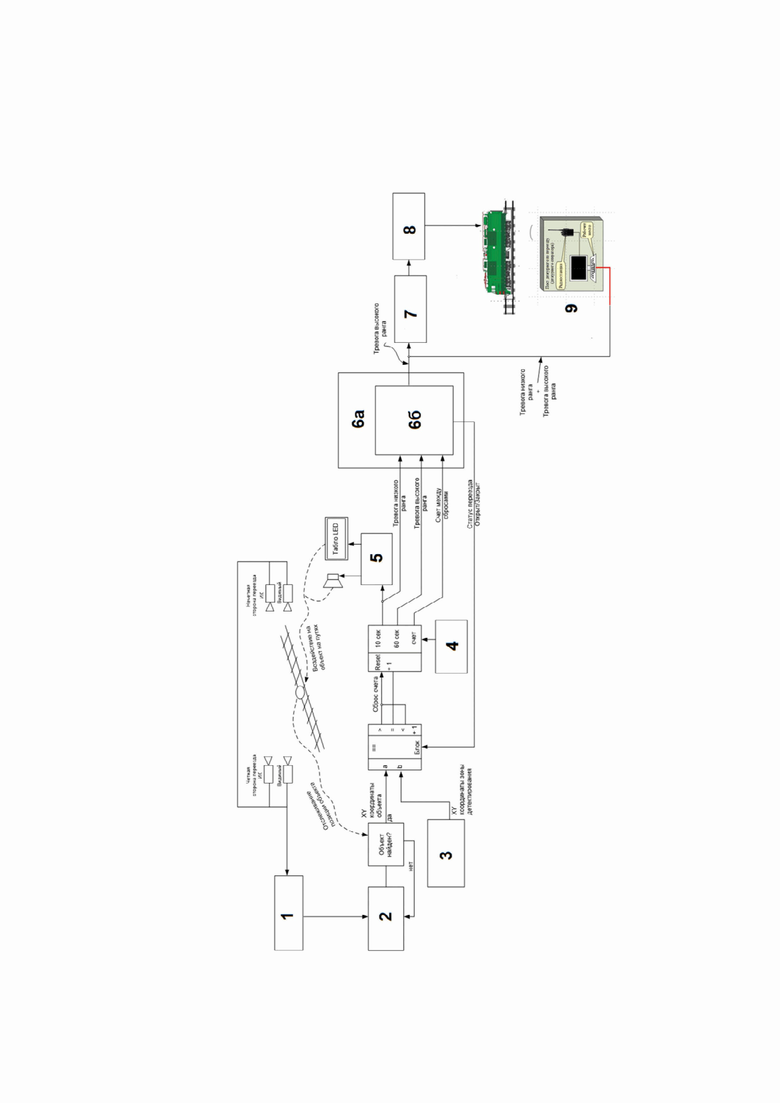
В частном варианте осуществления, не предназначенном для ограничения объема охраны, предложенная система может быть выполнена в соответствии с поясняющим чертежом.
Так, согласно чертежу на четной и нечетной сторонах переезда размещены камеры ИК и видимого диапазонов, соединенные для передачи видеосигнала с видеосервером 1.
Видеосервер 1 имеет связь с компьютерной системой, в частности, с блоком 2 выделения объектов на кадре изображения, который соединен с блоком определения наличия объекта. Выход блока определения наличия объекта соединен с первым входом компаратора, второй вход которого соединен с блоком 3 разметки зоны переезда в пространстве видеоизображения. На третий вход компаратора поступает сигнал о статусе шлагбаума от блоков 6а и 6б (устройства ЖАТ и СЦБ). Выходы компаратора связаны со счетчиком, связанным по другому входу с блоком 4 настройки временных порогов.
Выходы счетчика связаны: с блоком 5 оповещения, который выполнен с возможностью активации средств светового и звукового предупреждения; с блоками 6а, 6б для указания ранга тревоги (уровня опасности). При наличии повышенного уровня опасности соответствующий сигнал от блоков 6а и 6б поступает на АРМ диспетчера 9. При наличии высокого уровня опасности соответствующий сигнал от блоков 6а и 6б поступает на АРМ диспетчера 9, а также на автоматическую локомотивную сигнализацию (АЛС) 7 и автостоп 8.
В дополнительных вариантах осуществления в зоне видеонаблюдения могут быть использованы инфракрасные или радиочастотные датчики движения, оптические датчики или другие подходящие средства обнаружения для определения наличия объектов в зоне перехода.
Система также может содержать модуль связи для передачи сигнала тревоги и соответствующих данных диспетчеру и другому соответствующему персоналу.
В предложенном решении визуальные индикаторы могут включать мигающие огни, светодиодные табло или другие заметные визуальные сигналы для привлечения внимания к объектам в зоне пересечения. Звуковые индикаторы могут включать сирены или другие звуковые сигналы для предупреждения объектов в зоне пересечения о потенциальной опасности. Речевые индикаторы могут обеспечивать речевые предупреждения или инструкции для объектов в зоне пересечения, что повышает понятность тревожного сообщения.
В предложенном решении непрерывный мониторинг включает анализ моделей движения и реакции обнаруженного объекта для определения необходимых действий.
Благодаря реализации раскрытых способа и системы может обеспечиваться эффективное обнаружение потенциальных опасностей, предупреждение объектов, находящиеся на переезде, и инициация соответствующих мер безопасности. Это повышает общую безопасность и надежность железнодорожных операций на переездах.
Предлагаемое изобретение может осуществлять взаимодействие с автоматической локомотивной сигнализацией (АЛС) – существующей системой, разработанной для обеспечения безопасности движения поездов на железнодорожных линиях или ее вариантов (АЛСН, АЛС-ЕН).
Принцип работы АЛС основан на коммуникации между локомотивом и инфраструктурой железнодорожной линии. Система состоит из трех основных компонентов:
– устройства на локомотиве;
– магистральные устройства;
– блоки рубежного сигнализирования.
Устройства на локомотиве, называемые приемниками АЛС, получают информацию от магистральных устройств, установленных вдоль железнодорожной линии. Магистральные устройства передают сигналы в виде кодов на специальной кабельной линии или по радиоканалу. Блоки рубежного сигнализирования устанавливаются на определенных участках железнодорожной линии и контролируют скорость движения поезда. Они передают информацию о разрешенной скорости и других условиях движения на локомотив через магистральные устройства. Приемники АЛС на локомотиве анализируют полученные сигналы и соответствующим образом контролируют работу поезда. Если скорость поезда превышает разрешенное значение или возникают другие нарушения условий движения, система АЛС автоматически срабатывает и активирует аварийное торможение, чтобы предотвратить аварии и обеспечить безопасность.
Аварийное торможение может быть реализовано известным способом на основе системы автостопа. Автостоп для экстренного торможения состава в автоматическом режиме представляет собой процедуру, при которой система автоматически определяет критическую ситуацию и инициирует немедленное торможение поезда для обеспечения безопасности.
В автоматическом режиме система наблюдает и анализирует различные параметры и сигналы, такие как скорость, расстояние до препятствия, сигналы с датчиков, информацию о состоянии пути и другие входные данные. Если эти данные указывают на возникновение аварийной ситуации или угрозу безопасности, система автоматически инициирует экстренное торможение.
При активации автостопа в автоматическом режиме система отправляет сигналы или команды на все вагоны поезда, активируя аварийное тормозное оборудование. Это может включать активацию экстренного тормоза, декомпрессию пневматической системы или другие механизмы торможения, зависящие от типа и конфигурации поезда.
Параллельно с активацией тормозной системы, система автоматически сообщает о ситуации операторам и диспетчерам поезда или железнодорожной инфраструктуры. Это позволяет им принять дополнительные меры для обеспечения безопасности и координировать оперативные действия.
Автостоп в автоматическом режиме обеспечивает быструю реакцию на угрозы безопасности, существенно превосходящую реакцию при управлении системой в ручном режиме, тем самым повышая эффективность системы предотвращения аварий. Это важный элемент современных систем безопасности на железных дорогах, который помогает предотвратить потенциально опасные ситуации и обеспечить безопасность пассажиров и персонала.
Реализация поведенческого анализа объектов в предложенном решении повышает надежность определения вероятности возникновения аварийной ситуации, исключает ошибки человеческого фактора, обеспечивает непрерывный контроль ситуации в режиме реального времени и обеспечивает гибкость настройки и оперативность реагирования системы на нештатные ситуации в автоматическом режиме.
Таким образом, предложенная группа изобретений может быть реализована специалистом на основании существующего уровня техники, обеспечивая при этом достижение всей совокупности раскрытых в описании технических результатов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УДАЛЕННОГО КОНТРОЛЯ И ИНФОРМИРОВАНИЯ МАШИНИСТА О ЗАНЯТОСТИ ЖЕЛЕЗНОДОРОЖНОГО ПЕРЕЕЗДА | 2017 |
|
RU2667035C1 |
| СИСТЕМА ДЛЯ ПРЕДОТВРАЩЕНИЯ АВАРИЙ НА ЖЕЛЕЗНОДОРОЖНЫХ ПУТЯХ | 2006 |
|
RU2295470C1 |
| Способ повышения безопасности пешеходов на железнодорожном переезде | 2023 |
|
RU2809860C1 |
| Инфраструктурная система технического зрения обеспечения безопасности движения поездов в области ограниченной видимости | 2020 |
|
RU2752155C1 |
| Система автоматизированного регулирования скорости локомотива в зоне сближения с неохраняемыми и необслуживаемыми переездами | 2018 |
|
RU2696046C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ ЧЕЛОВЕКА В ОПАСНОЙ ЗОНЕ И ПРЕДУПРЕЖДЕНИЯ ЕГО ОБ ОПАСНОСТИ | 2021 |
|
RU2781356C1 |
| Способ контроля проезда транспорта через железнодорожный переезд | 2021 |
|
RU2774127C1 |
| РУЧНОЙ СПОСОБ ИСПОЛЬЗОВАНИЯ ПОРОШКОВЫХ И ГАЗОВЫХ ОГНЕТУШАЩИХ ВЕЩЕСТВ ИЗ МОДУЛЕЙ АВТОМАТИЧЕСКИХ УСТАНОВОК ЛОКАЛЬНОГО ПОЖАРОТУШЕНИЯ И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2552257C1 |
| Стационарный комплекс обнаружения препятствий в области ограниченной видимости | 2019 |
|
RU2711480C1 |
| УСТРОЙСТВО ДЛЯ ПРЕДУПРЕЖДЕНИЯ АВАРИЙНЫХ СИТУАЦИЙ НА ЖЕЛЕЗНОДОРОЖНЫХ ПЕРЕЕЗДАХ | 2005 |
|
RU2284939C1 |
Группа изобретений относится к средствам безопасности движения на железнодорожном переезде. Способ автоматического контроля зоны железнодорожного переезда заключается в том, что осуществляют видеоконтроль зоны железнодорожного переезда, при котором методами компьютерного зрения производят обнаружение объектов, которые перемещались в контролируемой зоне железнодорожного переезда, а затем статично находятся в этой зоне заданное количество времени, производят ранжирование объектов. Причем, чем больше время неподвижного нахождения, тем выше ранг объекта, причем временной порог зависит от срабатывания сигнала автоматики шлагбаума и уменьшается при его закрытии. При достижении заданного ранга объекта активируют средства светового и звукового предупреждения и осуществляют непрерывный контроль за реакцией обнаруженного объекта. При повышенном уровне опасности направляют сообщение диспетчеру и подвижному составу о факте срабатывания оповещения, при высоком уровне опасности активируют систему автоматического торможения состава. Также заявлена система автоматического контроля зоны железнодорожного переезда. Технический результат заключается в повышении безопасности функционирования железнодорожного переезда. 2 н. и 4 з.п. ф-лы, 1 ил.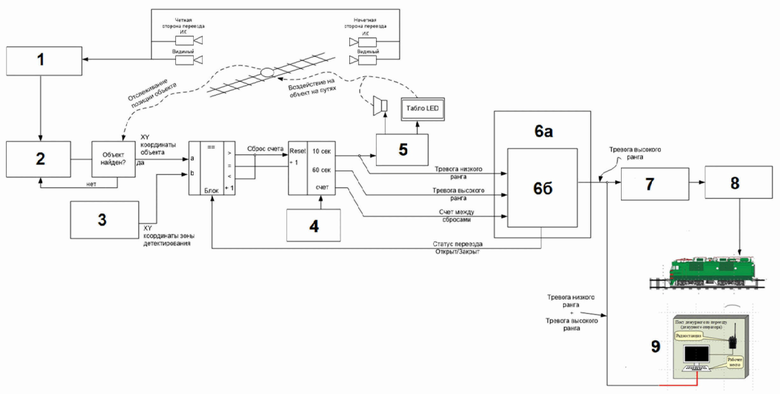
1. Способ автоматического контроля зоны железнодорожного переезда, включающий размещение комплекса технических и программных средств видеонаблюдения в отдельных телекоммуникационных всепогодных и вандалозащищенных шкафах в зоне железнодорожного переезда, которую на четной и нечетной сторонах оснащают системой из видеокамер в видимом и инфракрасном диапазоне, соединенных с цифровым видеорегистратором, выполняющим функцию приема, фильтрации и хранения видеоизображений, который соединен с компьютерным комплексом, выполняющим функции обработки видеоизображений, при этом в зоне железнодорожного переезда размещают средства светового и звукового предупреждения, осуществляют видеоконтроль зоны железнодорожного переезда, при котором методами компьютерного зрения производят обнаружение объектов, которые перемещались в контролируемой зоне железнодорожного переезда, а затем статично находятся в этой зоне заданное количество времени, которое превышает время, необходимое для пересечения зоны железнодорожного переезда при условии сохранения их прежней скорости движения, производят ранжирование объектов по количеству накопленного времени их неподвижного нахождения в контролируемой зоне железнодорожного переезда, причем, чем больше время неподвижного нахождения, тем выше ранг объекта, причем временной порог зависит от срабатывания сигнала автоматики шлагбаума и уменьшается при его закрытии, при достижении заданного ранга объекта формируют сигнал о возможной аварийной ситуации, активируют средства светового и звукового предупреждения, далее осуществляют непрерывный контроль за реакцией обнаруженного объекта на светозвуковое воздействие, выявляя четыре возможных события: объект покидает контролируемую зону железнодорожного переезда или объект не реагирует на воздействие, при включенном или выключенном сигнале автоматики шлагбаума соответственно, при этом предусматривают уровни опасности: минимальный, средний, повышенный и высокий, при повышенном уровне направляют сообщение диспетчеру и подвижному составу о факте срабатывания оповещения, при высоком уровне реализуют функцию предотвращения аварийной ситуации путем активации автотормоза состава и осуществляя его экстренное торможение.
2. Способ по п. 1, отличающийся тем, что в зоне видеонаблюдения дополнительно используют инфракрасные радиочастотные и/или оптические датчики движения для определения наличия объектов в контролируемой зоне.
3. Способ по п. 1, отличающийся тем, что, где средства светового предупреждения включают мигающие огни, светодиодные табло, средства звукового предупреждения включают сирены и/или речевые индикаторы, обеспечивающие речевые предупреждения или инструкции для объектов в зоне пересечения.
4. Система автоматического контроля зоны железнодорожного переезда, включающая комплекс технических и программных средств видеонаблюдения, размещенных в зоне железнодорожного переезда в отдельных телекоммуникационных всепогодных и вандалозащищенных шкафах, систему из видеокамер в видимом и инфракрасном диапазоне на четной и нечетной сторонах железнодорожного переезда, соединенных с цифровым видеорегистратором, выполняющим функцию приема, фильтрации и хранения видеоизображений, который соединен с компьютерным комплексом, выполняющим функции обработки видеоизображений, соединенные с компьютерным комплексом средства светового и звукового предупреждения, при этом компьютерный комплекс выполнен с возможностью посредством методов компьютерного зрения обнаружения объектов, которые перемещались в контролируемой зоне железнодорожного переезда, а затем статично находятся в этой зоне заданное количество времени, которое превышает время, необходимое для пересечения зоны железнодорожного переезда при условии сохранения их прежней скорости движения, с возможностью ранжирования объектов по количеству накопленного времени их неподвижного нахождения в контролируемой зоне железнодорожного переезда, причем, чем больше время неподвижного нахождения, тем выше ранг объекта, а временной порог зависит от срабатывания сигнала автоматики шлагбаума и уменьшается при его закрытии, с возможностью формирования сигнала о возможной аварийной ситуации при достижении заданного ранга объекта, с возможностью активации средств светового и звукового предупреждения, с возможностью осуществления непрерывного контроля за реакцией обнаруженного объекта на светозвуковое воздействие, выявляя четыре возможных события: объект покидает контролируемую зону железнодорожного переезда или объект не реагирует на воздействие, при включенном или выключенном сигнале автоматики шлагбаума соответственно, при этом предусмотрены уровни опасности: минимальный, средний, повышенный и высокий, при этом компьютерный комплекс при повышенном уровне направляет сообщение диспетчеру и подвижному составу о факте срабатывания оповещения, при высоком уровне реализует функцию предотвращения аварийной ситуации путем активации автотормоза состава для его экстренного торможения.
5. Система по п. 4, отличающаяся тем, что в зоне видеонаблюдения дополнительно содержит инфракрасные радиочастотные и/или оптические датчики движения для определения наличия объектов в зоне перехода.
6. Система по п. 4, отличающаяся тем, что средства светового предупреждения включают мигающие огни, светодиодные табло, средства звукового предупреждения включают сирены и/или речевые индикаторы, обеспечивающие речевые предупреждения или инструкции для объектов в зоне пересечения.
| Способ повышения безопасности пешеходов на железнодорожном переезде | 2023 |
|
RU2809860C1 |
| Система контроля и удаленного информирования локомотивных бригад о занятости железнодорожного переезда | 2023 |
|
RU2803901C1 |
| Способ моделирования электрического поля изоляторов | 1960 |
|
SU134889A1 |
| KR 100967456 B1, 02.07.2010. | |||

