Изобретение относится к средствам обеспечения безопасности на железнодорожном транспорте и может быть использовано для определения объектов на путях железнодорожного транспорта, передаче данных в сети мобильной связи для оповещения машиниста скоростного поезда о наличии препятствий в зоне ограниченной видимости и оповещения людей в области движения скоростных поездов.
Известно устройство предупреждения о падении посторонних предметов на путь, содержащее датчики обнаружения посторонних предметов, закрепленные на основаниях, установленных на платформе, соединенные в единую электрическую цепь и подключенные к кабельным концевым муфтам, причем токопередающие поверхности электрической цепи в местах соединения имеют антикоррозионное токопроводящее покрытие, а датчики выполнены в виде датчиков дальнодействующего типа, например, в виде ультразвуковых датчиков движения, и введены выполненные из влагостойкого материала защитные корпуса, в которых размещены датчики (RU 180631, B61L 23/00, 19.06.2018).
Известно устройство основано на применении установленных в зоне повышенной опасности ультразвуковых датчиков движения для обнаружения посторонних предметов,. Когда в зоне контроля ультразвукового датчика движения появляется движущийся предмет, то частота отраженной от этого предмета волны изменяется из-за эффекта Доплера. Приемник датчика регистрирует изменение частоты и преобразует это изменение в электрический сигнал. Этот сигнал передается на контрольную аппаратуру дежурного по станции как аварийный сигнал.
К недостатку этого устройства следует отнести небольшую область действия ультразвуковых датчиков и невозможность оперативного оповещения машиниста скоростного поезда.
В качестве прототипа принята система удаленного контроля и информирования машиниста о занятости железнодорожного переезда, содержащая установленные на переезде видеокамеры, первое устройство приема-передачи радиосигнала, связанное с устройством формирования сигнала тревоги и видеокадра, и размещенное на локомотиве второе устройство приема-передачи радиосигнала, подключенное к управляющему контроллеру, видеомонитору, запоминающему устройству и тревожным сигнализаторам, система снабжена средством определения занятости переезда, предназначенным для формирования сигнала о наличии объекта на переезде в случае соответствия этого объекта заранее заданным параметрам по форме и размеру, подключенным к видеокамерам и первому устройству приема-передачи радиосигнала, а управляющий контроллер подключен к средству, осуществляющему расчет тормозных кривых, и выполнен с возможностью формирования сигнала запроса информации о наличии объекта на переезде при приближении на заданное время хода к точке начала полного служебного или экстренного торможения перед ближайшим переездом, при этом средство определения занятости переезда выполнено с возможностью формирования сигнала о наличии объекта на переезде при получении указанного запроса (RU 2667035, B61L 29/00, 13.09.2018).
Недостатком данной системы является невозможность достоверного функционирования в различных погодных условиях, а также в связи с установкой на переездах не реализуется функция оповещения людей, так как для этой задачи используются существующие средства автоблокировки.
Задача, на решение которой направлено изобретение заключается в создании системы, позволяющей обнаруживать объекты в области движения скоростного поезда (в габарите пути и ближайших зонах), выполнять оповещение людей, находящихся в зоне действия системы, оповещение машиниста скоростного поезда о наличии препятствий в зоне ограниченной видимости.
Технический результат заключается в повышении безопасности на железнодорожном транспорте за счет повышения достоверности определения объектов в зоне ограниченной видимости, передачи информации о наличии объектов в этой зоне и своевременного оповещения машиниста.
Технический результат достигается тем, что в стационарный комплекс обнаружения препятствий в области ограниченной видимости, содержащий видеокамеры и основной вычислительный блок, согласно изобретению введены дополнительный вычислительный блок, радар, навигационный приемник и извещатель, каждый вычислительный блок состоит из процессора с подключенными к нему модулем синхронизации и модулем обнаружения препятствий, соединенным с модулем обработки данных радара и с модулем обработки данных видеокамер, которые подключены соответственно к выходу радара и к выходам видеокамер, при этом в основной вычислительный блок дополнительно введены и подключены к процессору модуль поездной ситуации, соединенный с модулем оповещения, модуль сравнения, выходом соединенный с модулем оповещения и устройство шифрации и дешифрации, соединенное с радиомодемом, второй вход модуля сравнения подключен к процессору дополнительного вычислительного блока, модули синхронизации основного и дополнительного вычислительных блоков соединены с навигационным приемником, а с выходом модуля оповещения соединен извещатель.
Техническое решение с вышеперечисленной совокупностью признаков обеспечивает достижение технического результата за счет использования радара, определяющего наличие объектов в контролируемой зоне при плохих погодных условиях, извещателя, обеспечивающего оповещение о приближении скоростного поезда, навигационного приемника, обеспечивающего синхронизацию одновременно работающих средств обработки данных, а также двухканальной обработки данных со сравнением полученных результатов.
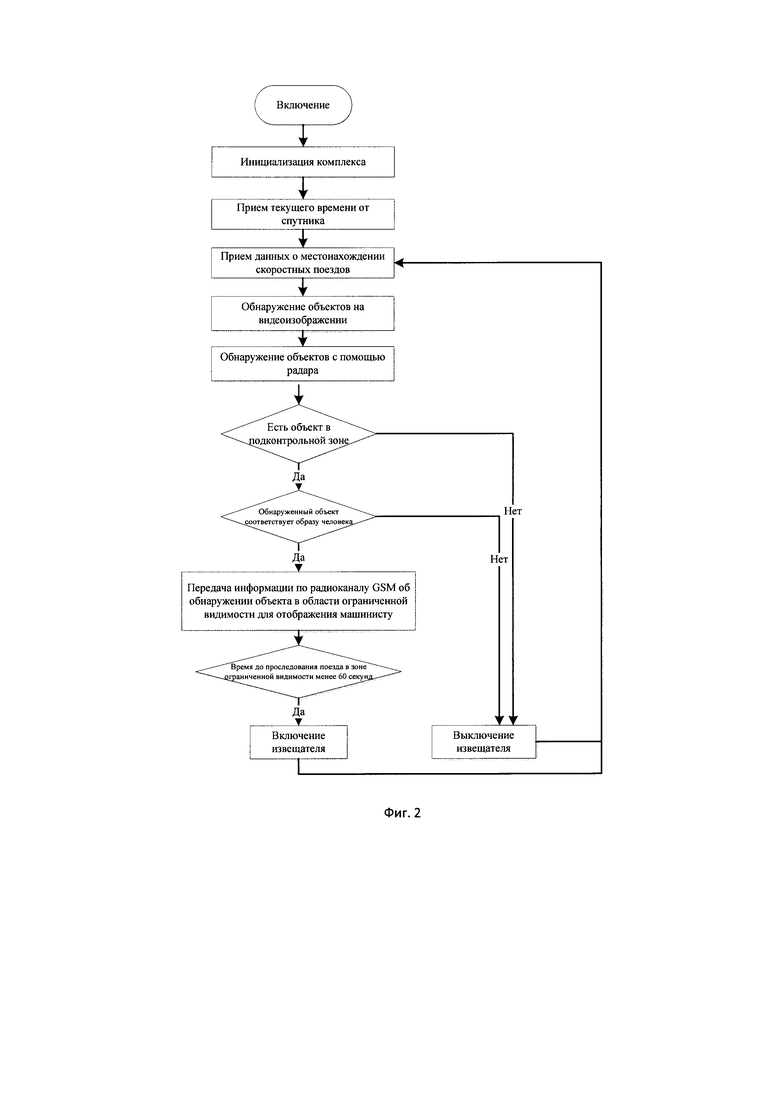
Сущность изобретения поясняется фиг. 1, на которой представлена блок-схема стационарного комплекса обнаружения препятствий в области ограниченной видимости и фиг. 2, на которой представлен алгоритм работы комплекса.
Стационарный комплекс обнаружения препятствий в области ограниченной видимости содержит видеокамеры 1 и 2, основной вычислительный блок 3, дополнительный вычислительный блок 4, каждый вычислительный блок 3 (4) состоит из процессора 5 (6) с подключенными к нему модулем 7 (8) синхронизации и модулем 9 (10) обнаружения препятствий, соединенным с модулем 11 (12) обработки данных радара 13 и с модулем 14 (15) обработки данных видеокамер 1 и 2, которые подключены соответственно к выходу радара 13 и к выходам видеокамер 1 и 2, при этом в основной вычислительный блок 3 дополнительно введены и подключены к процессору 5 модуль 16 поездной ситуации, соединенный с модулем 17 оповещения, модуль 18 сравнения, выходом соединенный с модулем 17 оповещения и устройство 19 шифрации и дешифрации, соединенное с радиомодемом 20, второй вход модуля 18 сравнения подключен к процессору 6 дополнительного вычислительного блока 4, модули 7 и 8 синхронизации основного и дополнительного вычислительных блоков 3 и 4 соединены с навигационным приемником 21, а с выходом модуля 17 оповещения соединен извещатель 22.
Стационарный комплекс обнаружения препятствий в области ограниченной видимости работает следующим образом (фиг. 2): после включения электропитания устройства происходит инициализация основной вычислительного блока 3, дополнительного вычислительного блока 4. Инициализация основного вычислительного блока 3 включает в себя: подключение и регистрация в сети связи GSM с использованием радиомодема 20, установка защищенного соединения с информационными системами за счет создания VPN-туннеля с использованием устройства 19 шифрации и дешифрации. Далее, каждый вычислительный блок 3 (4) выполняет получение и установку текущего времени в модуле синхронизации 7 (8) с использованием данных принимаемых навигационным приемником 21.
Основной алгоритм работы процессора 5 обеспечивает прием информации о местонахождении скоростных поездов с периодичностью 5 секунд и дальнейшую запись параметров в модуль 16 поездной ситуации. Далее каждый процессор 5 (6) выполняет считывание текущих данных с циклом 100 мс от видеокамер 1 и 2 и в модуле 14 (15) обработки данных видеокамер 1 и 2 реализует предварительное определение наличия объектов на полученном видеоизображении и считывание текущих данных с циклом 100 мс от радара 3 и в модуле 11 (12) обработки данных радара 3 реализует предварительное определение наличия объектов на основе сформированных радаром данных.
На основе нейронной сети модуль 9 (10) обнаружения препятствий обеспечивает обнаружение образа человека в предварительно сформированных данных и выдает результат в модуль 18 сравнения.
При успешном сравнении данных процессор 5 формирует сообщение для информационной системы, обеспечивающей взаимодействие со скоростными поездами, о наличии препятствия в области ограниченной видимости, а также информацию для модуля 17 оповещения. Модуль 17 оповещения выполняет расчет времени до проследования области ограниченной видимости скоростным поездом, и если время до проследования составляет менее 60 секунд обеспечивает включение извещателя 22.
| название | год | авторы | номер документа |
|---|---|---|---|
| Инфраструктурная система технического зрения обеспечения безопасности движения поездов в области ограниченной видимости | 2020 |
|
RU2752155C1 |
| СПОСОБ МОНИТОРИНГА СОСТОЯНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ ПРИ ДВИЖЕНИИ ПОЕЗДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2829561C2 |
| СИСТЕМА ДЛЯ ОПЕРАТИВНОЙ ПЕРЕДАЧИ ПРЕДУПРЕЖДЕНИЙ И ЭЛЕКТРОННЫХ КАРТ НА ВЫСОКОСКОРОСТНОЙ ПОЕЗД | 2015 |
|
RU2578643C1 |
| СТАНЦИОННОЕ УСТРОЙСТВО ДЛЯ СИСТЕМЫ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2015 |
|
RU2578638C1 |
| Система связи и дистанционного управления для скоростного электропоезда | 2021 |
|
RU2754376C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ ЧЕЛОВЕКА В ОПАСНОЙ ЗОНЕ И ПРЕДУПРЕЖДЕНИЯ ЕГО ОБ ОПАСНОСТИ | 2021 |
|
RU2781356C1 |
| Система управления движением поездов в режиме виртуальной сцепки | 2024 |
|
RU2828911C1 |
| Робот-сигналист и система ограждения места работ и оповещения работающих на перегоне при капитальном ремонте пути | 2022 |
|
RU2791772C1 |
| ЛОКОМОТИВНАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ | 2013 |
|
RU2554912C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО КОНТРОЛЯ СВОБОДНОСТИ ЗОНЫ ПЕРЕЕЗДА | 2020 |
|
RU2751041C1 |
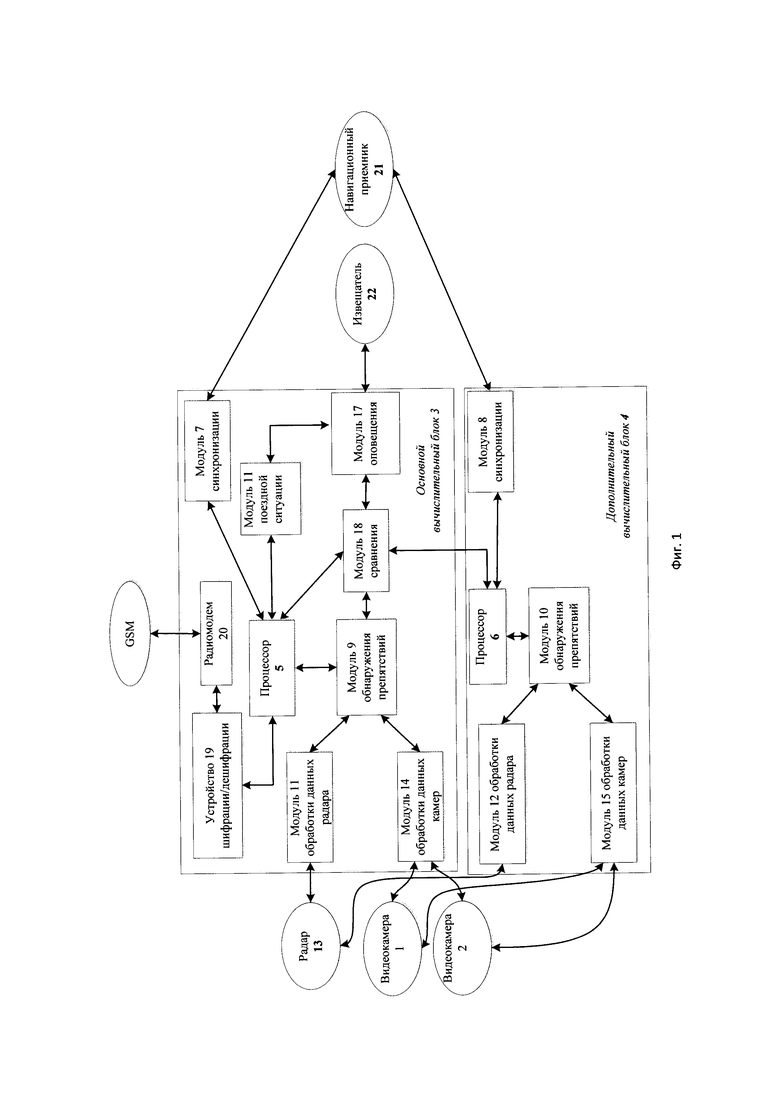
Изобретение относится к средствам обнаружения и оповещения машинистов поездов о наличии препятствий на пути следования. Комплекс содержит видеокамеры 1 и 2, основной вычислительный блок 3, дополнительный вычислительный блок 4, каждый вычислительный блок 3 (4) состоит из процессора 5 (6) с подключенными к нему модулем 7 (8) синхронизации и модулем 9 (10) обнаружения препятствий, соединенным с модулем 11 (12) обработки данных радара 13 и с модулем 14 (15) обработки данных видеокамер 1 и 2, которые подключены соответственно к выходу радара 13 и к выходам видеокамер 1 и 2, при этом в основной вычислительный блок 3 дополнительно введены и подключены к процессору 5 модуль 16 поездной ситуации, соединенный с модулем 17 оповещения, модуль 18 сравнения, выходом соединенный с модулем 17 оповещения, и устройство 19 шифрации и дешифрации, соединенное с радиомодемом 20, второй вход модуля 18 сравнения подключен к процессору 6 дополнительного вычислительного блока 4, модули 7 и 8 синхронизации основного и дополнительного вычислительных блоков 3 и 4 соединены с навигационным приемником 21, а с выходом модуля 17 оповещения соединен извещатель 22. Достигается повышение безопасности с повышением достоверности определения объектов в зоне ограниченной видимости. 2 ил.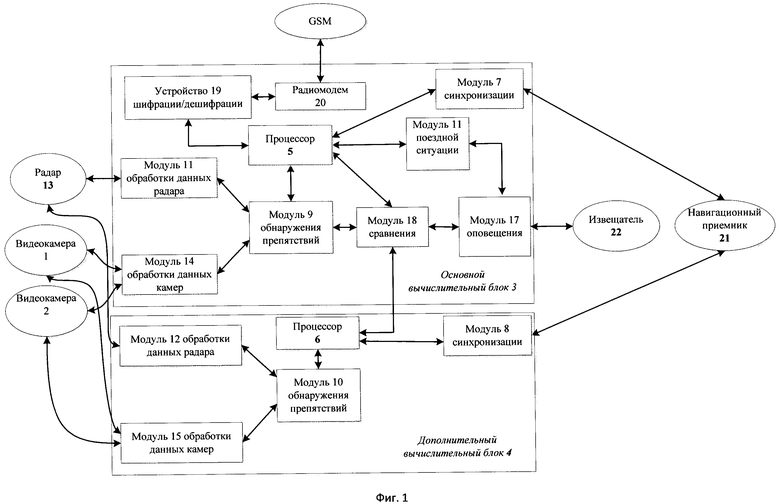
Стационарный комплекс обнаружения препятствий в области ограниченной видимости, содержащий видеокамеры и основной вычислительный блок, отличающийся тем, что в него введены дополнительный вычислительный блок, радар, навигационный приемник и извещатель, каждый вычислительный блок состоит из процессора с подключенными к нему модулем синхронизации и модулем обнаружения препятствий, соединенным с модулем обработки данных радара и с модулем обработки данных видеокамер, которые подключены соответственно к выходу радара и к выходам видеокамер, при этом в основной вычислительный блок дополнительно введены и подключены к процессору модуль поездной ситуации, соединенный с модулем оповещения, модуль сравнения, выходом соединенный с модулем оповещения, и устройство шифрации и дешифрации, соединенное с радиомодемом, второй вход модуля сравнения подключен к процессору дополнительного вычислительного блока, модули синхронизации основного и дополнительного вычислительных блоков соединены с навигационным приемником, а с выходом модуля оповещения соединен извещатель.

