Изобретение относится к области ближней локации и технике промышленных уровнемеров.
Известен способ измерения расстояния [1], являющийся аналогом, состоящий в излучении в направлении контролируемого объекта частотно-модулируемого сигнала, приеме отраженного от объекта сигнала, преобразования на смесителе излучаемого и принятого сигналов и выделения сигнала разностной частоты (СРЧ), измерения ее величины и по ней определения расстояния до объекта.
Обработка СРЧ производится либо во временной области [2, 3], (счетный метод и его разновидности, весовые методы усреднения), являющаяся аналогом, либо в частотной области. И временному, и спектральному методам определения расстояния присуща методическая ошибка дискретности (ОД), величина которой обратно пропорциональна девиации частоты. Необходимость снижения ОД вынуждает увеличивать девиацию и усложнять обработку СРЧ. Это является недостатком аналогов.
Известен способ измерения расстояния [4] с помощью ЧМ уровнемера, являющийся прототипом, при котором расстояние определяется по числу полупериодов СРЧ на интервале наблюдения и величине частоты излучения в моменты времени, соответствующие началу первого и концу последнего полупериода СРЧ. Недостаток прототипа заключается в сложности измерения (с необходимой точностью) мгновенного значения частоты ЧМ СВЧ колебания при непрерывной модуляции.
Технические задачи, решаемые предлагаемым способом, - обеспечение отсутствия методической ошибки дискретности и устранение трудности измерения частоты fn+m и fn, присущей прототипу при аналоговой модуляции частоты излучения.
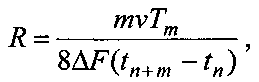
Технические задачи решаются следующим образом. В направлении контролируемого объекта излучается сигнал, модулированный по частоте по линейному закону (модуляционная характеристика треугольная), принимается отраженный от объекта сигнал, который на смесителе смешивается с излучаемым сигналом и выделяется сигнал разностной частоты. По нулевым значениям СРЧ определяется число полупериодов m, укладывающихся на интервале анализа, измеряется время начала первого полупериода tn, измеряется время окончания m-го полупериода tn+m, а измеряемое расстояния рассчитывается по формуле:

для симметричной треугольной модуляционной характеристики;

для пилообразной модуляционной характеристики с нулевым обратным ходом, где ν - скорость электромагнитных волн, Tm - период модуляции, ΔF - диапазон перестройки частоты.
Выражения (1) и (2) получены на основании формулы, предложенной в [4]:

Если обозначить начало произвольного периода модуляции t1, нижнюю границу перестройки - f1, то для восходящей ветви симметричной треугольной модуляционной характеристики можно записать:
С учетом (3) получаем (1) и (2).
Аналогичный результат получается для нисходящей ветви.
В соответствии с (1) были проведены расчеты относительной ошибки измерения расстояния  где
где  - измеренное расстояние, для симметричной треугольной модуляционной характеристики при различных значениях параметров измерителя.
- измеренное расстояние, для симметричной треугольной модуляционной характеристики при различных значениях параметров измерителя.
При расчетах сигнал разностной частоты задавался в виде выражения

где  - время задержки отраженного сигнала, α - произвольная фаза, n(t) - аддитивный белый гауссовский шум. Расчеты проводились методом статистических испытаний при следующих параметрах зондирующего сигнала: период модуляции Tm=16 мс, интервал времени
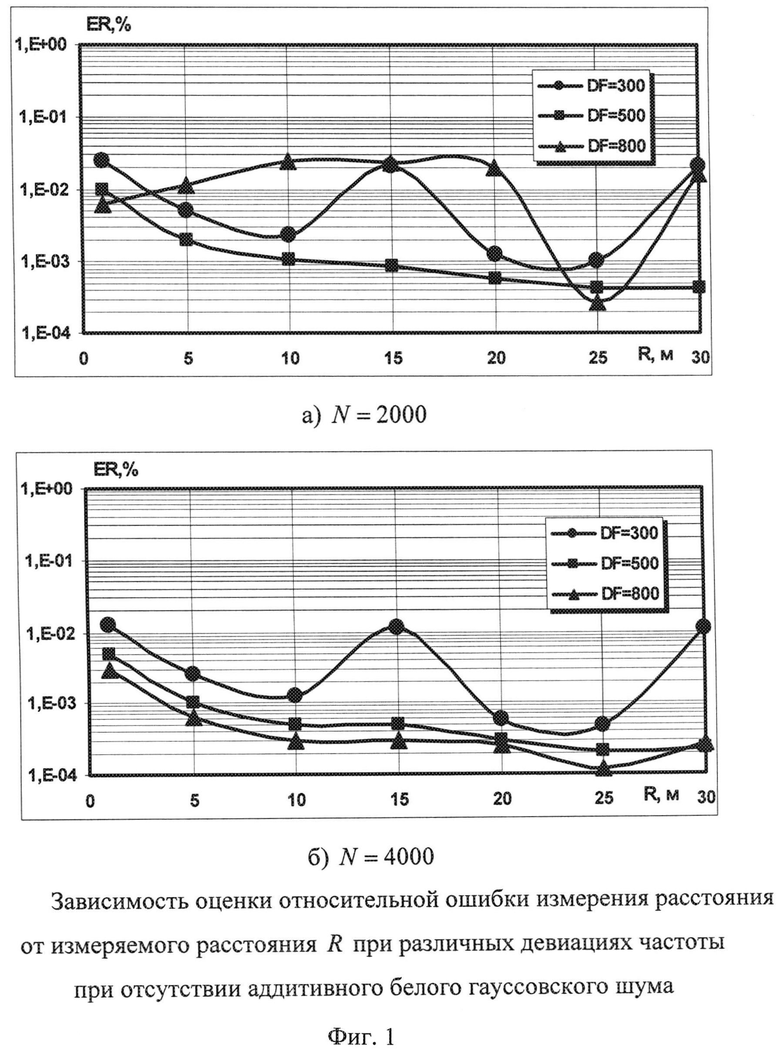
- время задержки отраженного сигнала, α - произвольная фаза, n(t) - аддитивный белый гауссовский шум. Расчеты проводились методом статистических испытаний при следующих параметрах зондирующего сигнала: период модуляции Tm=16 мс, интервал времени  девиация частоты ΔF = 300; 500; 800 МГц, количество отсчетов СРЧ на интервале анализа - 2000; 4000, величина α варьировалась в пределах [0÷π], усреднение в точках осуществлялось по 106 значениям.
девиация частоты ΔF = 300; 500; 800 МГц, количество отсчетов СРЧ на интервале анализа - 2000; 4000, величина α варьировалась в пределах [0÷π], усреднение в точках осуществлялось по 106 значениям.
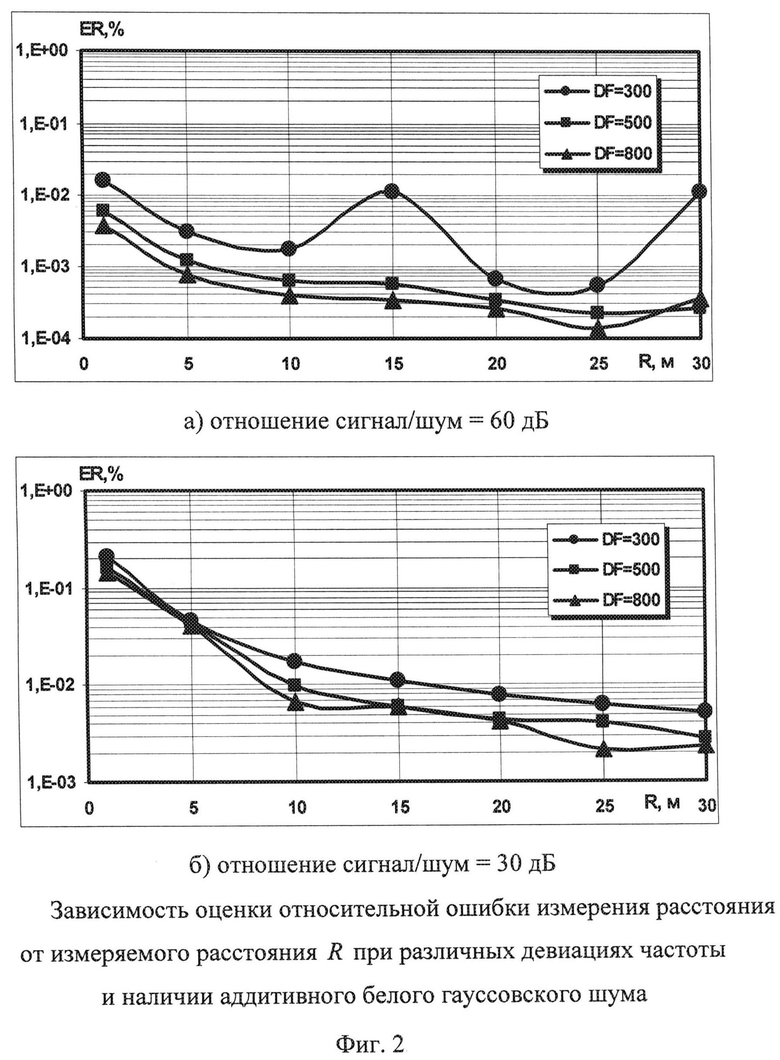
Результаты расчетов приведены на Фиг. 1 и Фиг. 2. Из приведенных зависимостей следует:
- методическая ошибка измерения R зависит от R и находится в пределах (10-2÷10-4)% при N=4000;
- частота дискретизации сильно влияет на относительную ошибку, для разной девиации ΔF это влияние различно;
- при отношении сигнал/шум = 60 дБ, влияние шума незначительно, при отношении сигнал/шум = 30 дБ ошибка определения R достигает (2·10-1÷4·10-3)%;
- влияние шума наиболее сильно сказывается при минимальной девиации.
Предлагаемый способ измерения расстояния в соответствии с (1) не известен для способов и устройств ЧМ ближней локации, из чего следует соответствие его критерию «новизна».
Изобретательский уровень следует из следующих особенностей предлагаемого способа.
Методическая ошибка дискретности отсутствует. Это следует из достаточно очевидного соотношения для R=const:
откуда получаем, что R(m)=R(m±1).
Отсутствие ошибки дискретности позволяет делать девиацию частоты ΔF достаточно небольшой.
В отличие от прототипа, операции измерения частоты излучения нет, что при аналоговой модуляции делает систему обработки гораздо более простой.
Предлагаемый способ работоспособен как при аналоговой модуляции частоты, так и при цифровом синтезе.
Указанные отличия в доступных источниках не наблюдаются, что указывает на соответствие заявляемого способа критерию «изобретательский уровень».
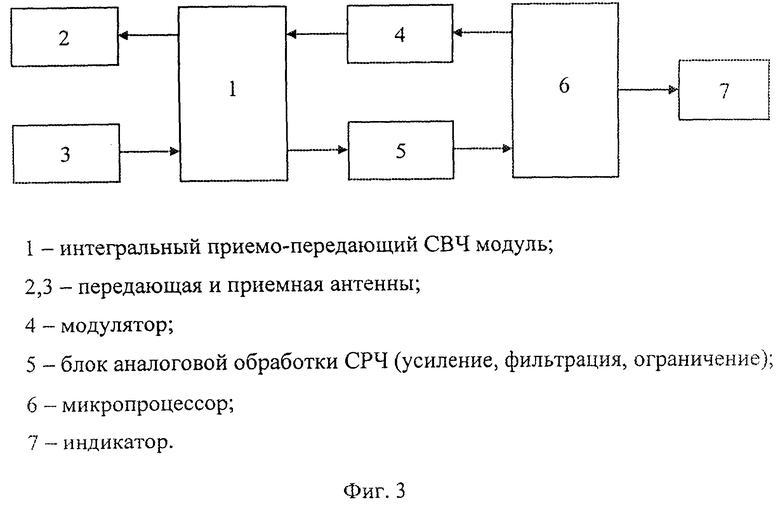
Возможная структурная схема реализации предлагаемого способа приведена на Фиг. 3. Обозначенные блоки выполняют следующие функции: 1 - интегральный приемо-передающий СВЧ модуль; 2, 3 - передающая и приемная антенны, 4 - модулятор, 5 - блок аналоговой обработки СРЧ (усиление, фильтрация, ограничение), 6 - микропроцессор, 7 - индикатор.
В микропроцессоре происходит измерение величин m, tn, tn+m и в соответствии с (1) определяется R.
Из структурной схемы следует, что методическая ошибка предлагаемого метода будет связана с цифровой обработкой СРЧ. Для ее снижения могут применяться различные алгоритмы определения величин m, tn, tn+m.
Библиографические данные
1. А.С. Виницкий. Очерк основ радиолокации при непрерывном излучении радиоволн. M.: Сов. радио. 1961, 495 с.
2. Б.А. Атаянц, В.В. Езерский и др. Прецизионные промышленные системы ЧМ радиолокации ближнего действия. // Успехи современной радиоэлектроники. 2008. №2, С. 3-23.
3. Патент РФ №2159923 МКИ G01F 23/284. Опубл. 27.11.2000.
4. Патент РФ №2436117 МКИ G01S 13/34. Опубл. 10.12.2011.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ОТ ИЗЛУЧАТЕЛЯ ДО КОНТРОЛИРУЕМОЙ СРЕДЫ | 2010 |
|
RU2436117C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ДО КОНТРОЛИРУЕМОЙ СРЕДЫ С ПОМОЩЬЮ ВОЛНОВОДНОГО ЛЧМ ЛОКАТОРА | 2017 |
|
RU2658558C1 |
| СПОСОБ УМЕНЬШЕНИЯ ДЕВИАЦИИ ЧАСТОТЫ ВОЛНОВОДНОГО УРОВНЕМЕРА С ЛЧМ СИГНАЛОМ | 2018 |
|
RU2693032C1 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ МАТЕРИАЛА В РЕЗЕРВУАРЕ | 2008 |
|
RU2410650C2 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ МАТЕРИАЛА В РЕЗЕРВУАРЕ | 2009 |
|
RU2399888C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОГЕРЕНТНОГО ЧАСТОТНО-МОДУЛИРОВАННОГО СИГНАЛА ДЛЯ РЛС С ПЕРИОДИЧЕСКОЙ ЧМ МОДУЛЯЦИЕЙ И УСТРОЙСТВО, РЕАЛИЗУЮЩЕЕ СПОСОБ | 2006 |
|
RU2347235C2 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ | 2017 |
|
RU2661488C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ И РАДИАЛЬНОЙ СКОРОСТИ | 2024 |
|
RU2840790C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЗОНДИРУЮЩЕГО ЧАСТОТНО-МОДУЛИРОВАННОГО СИГНАЛА ДЛЯ ДАЛЬНОМЕРА С ПЕРИОДИЧЕСКОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 2003 |
|
RU2234716C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ (ВАРИАНТЫ) | 2002 |
|
RU2234108C1 |
Изобретение относится к области ближней локации и технике промышленных уровнемеров. Достигаемый технический результат - исключение методической ошибки дискретности, упрощение за счет сокращения объема измерения, простота реализации при аналоговой и цифровой модуляции излучаемого сигнала. Указанный результат достигается за счет того, что способ основан на методе обработки сигнала разностной частоты, получаемого путем смешивания излучаемого сигнала, модулированного по частоте по линейному закону, и отраженного, при этом обработка ведется во временной области и включает измерение на интервале анализа числа полупериодов сигнала разностной частоты, времени начала первого полупериода, времени окончания последнего полупериода сигнала разностной частоты и на их основе, с учетом параметров модуляции, вычисление измеряемого расстояния. 3 ил.
Способ измерения расстояния до контролируемого объекта, включающий излучение в направлении объекта радиосигнала, модулированного по частоте по периодическому симметричному треугольному закону с периодом модуляции Tm и девиацией частоты ΔF, прием отраженного сигнала, получение сигнала разностной частоты путем смешивания принятого и излучаемого сигналов, отличающийся тем, что на каждом полупериоде модуляции осуществляются: измерение tn - времени начала первого полупериода сигнала разностной частоты, измерение m - числа полупериодов сигнала разностной частоты, измерение tn+m - времени окончания m-го полупериода сигнала разностной частоты, а измеряемое расстояние определяется по формуле:
где ν - скорость электромагнитной волны.
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ОТ ИЗЛУЧАТЕЛЯ ДО КОНТРОЛИРУЕМОЙ СРЕДЫ | 2010 |
|
RU2436117C1 |

