Область техники, к которой относится изобретение
Настоящее изобретение относится, в целом, к автономным тракторам для автономного перемещения и культивации сельскохозяйственных угодий.
Уровень техники
Применение технологии в сельском хозяйстве улучшило подходы, которые фермеры используют в сельскохозяйственных угодьях в наши дни. Современное сельское хозяйство сделало легким для фермеров достижение высокого урожая, в то же время используя меньше вложений. Согласно трендам в использовании технологии в сельском хозяйстве, существуют сильные надежды, что будущее сельского хозяйства является светлым. Например, механизация в сельском хозяйстве снизила чрезмерное использование людских ресурсов при выполнении некоторых из сельскохозяйственных работ. Как следствие, сельскохозяйственные машины становятся все крупнее и крупнее и более специализированными для выполнения одного типа культивации. Внедрение автономных тракторов считается следующим шагом в будущее сельского хозяйства, и ожидается, что с использованием автономных тракторов тренд на все более крупные и более предметно-ориентированные (специализированные) сельскохозяйственные машины будет продолжен.
Самодвижущиеся автомобили являются обычными в наши дни. На основе трендов в отношении улучшения технологии можно ожидать, что технология также будет использована для культивации сельскохозяйственных угодий. В настоящее время фермеры в развитых странах допускают тактический подход к тому, как они сажают, собирают, а также сохраняют свои урожаи. Хорошим примером новых тактических подходов является использование автономных тракторов в сельском хозяйстве. Идея автономных тракторов может прослеживаться до внедрения идеи точного земледелия в восьмидесятых. В эти дни фермеры использовали GPS-технологию в качестве путеводителя для тракторов по сельскохозяйственным угодьям. Целью такого подхода было снижение расхода топлива и улучшение эффективности тракторов и земледельческих операций. По существу, эти первоначальные этапы сформировали основу для развития автономных тракторов, следуя привнесению технологий, которые улучшили связь через беспроводные устройства. Автономные тракторы применяют точно такой же подход, что и беспилотные транспортные средства, т.е., используют усовершенствованные системы управления и датчики. С включением функциональных возможностей автономного рулевого управления такие тракторы получили дополнительные функциональные возможности управления. Несомненно, запуск автономных тракторов является важным проявлением более широкого использования технологии в сельском хозяйстве.
Выгоды для фермеров являются очевидными. Является неоспоримым тот факт, что занятие сельским хозяйством является нелегким предприятием, оно подразумевает работу в течение долгих часов и принятие принципов тяжелого труда в жестких погодных условиях. Принимая во внимание известное состояние фермеров, большинство из них не имеют работников, чтобы давать им работу в сельскохозяйственных угодьях, и, следовательно, должны делать все сами. Автономные тракторы могут быть позитивным выходом. На фоне этого, аккуратность и точность являются важными аспектами в сельском хозяйстве в различных аспектах, таких как посев. Рассматривая, например, такой посев, автономные тракторы могут быть оборудованы автономными посевными системами, которые обеспечивают высокую точность при посеве. С такими возможностями фермеры уверены в сохранении посевных семян. В общем, использование таких тракторов может вести к более высокой отдаче на инвестиции, поскольку точность улучшается.
Одним из факторов, которые мешают сельскохозяйственному производству в развитых и развивающихся странах, является отсутствие достаточной рабочей силы. Обычно, фермеры возделывают небольшой участок земли, которым они определенно должны распорядиться со своей ограниченной рабочей силой. Однако, с применением автономных тракторов, проблема недостаточности рабочей силы удовлетворяется, поскольку число работников, необходимых для культивации сельскохозяйственных земель, может быть снижено.
Также данные играют важную роль в определении решений фермеров. Обычно, отсутствие четких и достоверных данных может мешать принятию решений фермерами и, следовательно, иметь неблагоприятные влияния на объем продукции, получаемой с полей. Существуют различные источники и типы данных, которым фермер должен следовать в своих земледельческих действиях. Например, данные о почве являются важными в том, что они помогают фермерам в определении того, какие сельскохозяйственные культуры будут чувствовать себя хорошо на данном участке земли, посредством установления содержания влаги и количества питательных веществ. Автономные тракторы могут быть снабжены различными датчиками, которые могут быть использованы при сборе данных об условиях почвы, и, следовательно, предлагать платформу для улучшения выхода продукции доступных урожаев. Устранение человеческого взаимодействия в земледелии следом за использованием автономных тракторов может, таким образом, быть полезным. Испытывающие нагрузку рабочие не могут добиваться требуемого уровня эффективности на полях. Аналогично, часто является трудным для людей управлять различными задачами на ферме, особенно когда подразумевается большое сельскохозяйственное угодье. Автономные тракторы имеют соответствующие датчики, чтобы предлагать необходимую помощь в организации нескольких задач в сельскохозяйственном угодье, следовательно, снижая напряжение и рабочую нагрузку на ферме.
Автономные тракторы работают по технологии высокого уровня, которая может быть использована в сборе ценнейшей информации. Например, некоторые модели имеют функциональные возможности автоматического рулевого управления и GPS-технологии, которые улучшают управление курсом трактора. Усовершенствованные датчики приходятся кстати в определении уровня влажности почвы, действиях по посеву и сбору урожая, текущей урожайности, а также количеству топлива, необходимого для заданной площади земли. Дополнительно, другие модели автономных тракторов могут направлять фермеров относительно того, как применять удобрения.
Автономные тракторы предоставляют возможность точного управления работой и оборудованием фермы. Это делает возможным для фермеров продление своих рабочих часов. Датчики, установленные в тракторы, могут направлять его по правильному курсу даже в условиях пониженной видимости и ночью: работа продолжается даже во время ветреных, пыльных и туманных условий. Дополнительно, способность тракторов снижать рабочую нагрузку и напряжение работников является полезной при увеличившихся рабочих часах дня, поскольку фермер имеет большую гибкость в управлении задачами по выращиванию урожая.
Несомненно, автономные тракторы могут значительно улучшать земледелие. Однако, самодвижущиеся тракторы все еще должны быть одобрены, и там, где сама технология не кажется принципиальным препятствием для того, чтобы большие автономные тракторы культивировали землю, есть законодательство. Автономное движение к и от земельных угодий, очевидно, является большим препятствием, которое необходимо преодолеть. Также, законодательство препятствует транспортировке широких машин по дороге. Например, правило Евросоюза ограничивает ширину сельскохозяйственной машины 2,55 метрами. Фактически, автономное складывание более широких машин уже является частью технологии текущего дня, но это значительно увеличивает сложность и, таким образом, цену, по существу, подталкивая машины дополнительно становиться более специализированными и, в частности, более крупными. Это, в свою очередь сделает законодательство даже более усложненным и может даже означать, что на практике автономные тракторы будут применяться только в отдаленных, немноголюдных или даже только в ненаселенных районах.
Задачи изобретения
Задачей изобретения является смягчение недостатков автономных тракторов предшествующего уровня техники и их использование, в частности, чтобы предоставлять возможность более легкого практического использования без необходимости в массивном новом законодательстве.
Сущность изобретения
Для того, чтобы удовлетворять задачи изобретения, автономный трактор для автономного движения по сельскохозяйственным угодьям был изобретен, трактор содержит один или более датчиков для обнаружения препятствий при пересечений сельскохозяйственных угодий, сцепку для присоединения сельскохозяйственной машины, выбранной из группы сельскохозяйственных машин, каждая из которых приспособлена для присоединения к трактору, и соединительное устройство для присоединения трактора к грузовому автомобилю для грузовой автоперевозки для транспортировки трактора по дороге, при этом направление движения трактора для пересечения сельскохозяйственных угодий является перпендикулярным направлению движения, когда трактор транспортируется по дороге.
При этом изобретатели пошли против длительного тренда машин, становящихся все более крупными и более специализированными. Это основывается на признании того, что может быть достаточным, чтобы автономный трактор был экономически привлекательным, был небольшим и многофункциональным: небольшим в том смысле, что трактор, в принципе, не должен быть больше по сравнению с применяемым, как правило, устройством для преобразования энергии в движение ("мотор на колесах"). Нет необходимости иметь объединенное средство для культивации земли (такое как большие комбайны и другие машины для уборки урожая), пока трактор является приспособленным для присоединения к всевозможным различным сельскохозяйственным машинам для работы на сельскохозяйственных угодьях. Это означает, что настоящее изобретение предоставляет возможность того, что трактор может сохраняться относительно небольшим. Опять же, в силу того, что трактор, и, следовательно, сельскохозяйственная машина работает автономно, хорошая отдача от инвестиций может быть получена (несмотря на его небольшой размер), поскольку он может работать до 24 часов в сутки, 7 дней в неделю. Для небольшой машины, в свою очередь, текущее законодательство предусматривает гораздо меньше ограничений. Однако, чтобы быть экономически конкурентными, многие машины просто нуждаются в рабочей ширине, по меньшей мере, 3 метра. Даже более строго, многие современные машины имеют рабочую ширину, превышающую 5-6 метров вплоть даже до 20 метров или более. Это само по себе делает такие машины неподходящими для транспортировки по дороге, и не существует решения в законодательстве. Эта проблема также уместна для автономного трактора: многие машины просто должны иметь рабочую ширину, по меньшей мере, 3 метра. Однако, заявитель признал, что эта проблема может также быть преодолена посредством изобретения трактора, который имеет такие компоновки, что направление движения трактора при пересечении земельного участка является перпендикулярным направлению движения во время транспортировки по дороге. Это означает, что при движении по дороге сельскохозяйственная машина протягивается в направлении транспортировки, и, таким образом, продольном направлении дороги, что означает, что существует гораздо меньше законных ограничений. Согласно правилу Евросоюза, например, комбинация грузового автомобиля и прицепа может иметь длину до 18,75 метров. В то же самое время, при сохранении длины автономного трактора, например, ниже 2,55 (таким образом, являющейся довольно небольшой), во время транспортировки его ширина не будет превышать 2,55, что означает соответствие правилу Евросоюза во время транспортировки по дороге. Опять же, третье одобрение, которого необходимо было достичь с трактором изобретения: автономное движение по дорогам общественного пользования требует нового законодательства и далеко от реальности. Однако, оборудование трактора кабиной для водителя, чтобы иметь возможность управлять трактором, увеличит стоимость очень сильно и может даже полностью противоречить экономическому преимуществу автономности. Для того, чтобы решить это, изобретатели признали, что механически простое соединительное устройство (буксирная сцепка, седально-сцепное соединительное устройство, лебедка и т.д.) для присоединения трактора к грузовому автомобилю для перевозки для транспортировки трактора по дороге достигнет цели: для транспортировки по дороге общего пользования трактор выглядит как прицеп или перевозимый груз, а не как моторизованное транспортное средство. Это в сочетании с небольшой шириной, вследствие перпендикулярного направления транспортировки, гарантирует, что трактор согласно изобретению удовлетворяет большинству важных законов и правил, которые в настоящее время применяются в Европе и Северной Америке.
Таким образом, на основе нескольких пониманий и признаний, изобретатели смогли изобрести автономный трактор, который преодолевает большинство проблем, которые фактически препятствуют использованию такого трактора на практике, в частности, в населенных районах. Новое устройство идет против длительных трендов, начавшихся в 1930-е, все более крупных размеров и большей специализации для любой сельскохозяйственной машины. Наряду с этим, как очень важное преимущество выглядит то, что текущее изобретение предоставляет возможность культивации земельного участка с более низким или даже отсутствием риска укатывания почвы. Движение колес без сомнения является главной причиной укатывания почвы. Веса тракторов увеличивались менее чем от 3 тонн в 1940-е приблизительно до 20 тонн в наши дни для больших модулей с приводом на четыре колеса. Это является особой задачей, поскольку весенний посев часто выполняется, прежде чем почва достаточно просохнет, чтобы поддерживать тяжелое посевное оборудование. Текущее изобретение предоставляет возможность вернуться к тракторам ниже 10 тонн, или даже ниже 5 тонн, в зависимости от типа сельскохозяйственных машин, которые должны быть присоединены.
Изобретение также осуществляется в способе культивации сельскохозяйственных угодий, содержащем присоединение сельскохозяйственной машины к автономному трактору изобретения, присоединение трактора с присоединенной к нему сельскохозяйственной машиной к грузовому автомобилю для грузовой автоперевозки для транспортировки трактора по дороге к участку сельхозугодий, разгрузку трактора с грузового автомобиля для грузовой автоперевозки и предоставление возможности трактору автономно перемещаться по сельскохозяйственным угодьям, в то время как сельскохозяйственная машина обрабатывает землю.
ОПРЕДЕЛЕНИЯ
Трактор - это сельскохозяйственное транспортное средство, которое используется, чтобы тянуть сельскохозяйственное машинное оборудование и предоставлять энергию, необходимую для того, чтобы сельскохозяйственное оборудование обрабатывало землю (включая в себя любое действие по сбору урожая). Обычно, но не обязательно, это мощное транспортное средство с бензиновым или дизельным двигателем и большими задними колесами или бесконечными ленточными гусеницами (так называемыми гусеничными лентами).
Автономный трактор - это трактор, который может воспринимать свое окружение, принимать решения на основе того, что он воспринимает и распознает, и затем приходить в движение или выполнять манипуляцию в этом окружении. Эти действия на основе решений включают в себя, но не только, начало движения, остановку и маневрирование вокруг препятствий, которые находятся на его пути. Такой трактор может перемещаться по сельскохозяйственным угодьям без необходимости постоянного контроля оператора-человека, и когда сельскохозяйственная машина функционально присоединяется к трактору, она может автономно обрабатывать землю.
Грузовой автомобиль для грузовой автоперевозки - это моторное транспортное средство, предназначенное, чтобы иметь возможность и транспортировать объекты по дороге общего пользования, либо посредством буксировки объекта (если он имеет колеса для транспортировки по дороге), либо посредством перевозки объекта в (полу-)прицепе. Грузовой автомобиль для грузовой автоперевозки может, например, быть обычным управляемым человеком трактором или комбинацией грузовика и прицепа (прицеп, например, является грузовой платформой).
Дорога - это длинный узкий участок с выровненной или мощенной поверхностью, созданный для движения посредством моторного транспортного средства, транспорта и т.д. между двумя или более точками. Дорога также называется улицей или (скоростной) магистралью.
Сельскохозяйственное угодье - это земля, которая используется или подходит для ведения сельского хозяйства.
Датчик - это устройство, которое реагирует на физический стимул, такой как тепло, свет, звук, давление, магнетизм или отдельное движение и передает результирующий импульс, например, для измерения или управления работой.
Препятствие - это любой предмет, который препятствует или мешает свободному перемещению объекта в окружении. Препятствие может быть неподвижным физическим объектом, таким как большой камень или река, подвижным объектом, таким как животное или люди, но может также быть воображаемым объектом, таким как граница или участок земли.
Над означает в или на место, которое находится выше кого-то или чего-то.
Занимаемая площадь объекта является пространством, которое объект занимает, когда рассматривается сверху.
Колесо транспортного средства - это объект, выполненный с возможностью вращаться на оси, такой как обычное снабженное спицами колесо автомобиля или гусеничная лента, который используется для преобразования вращения (оси) в поступательное движение транспортного средства.
Спецификация датчика обозначает параметр, который является уместным для функциональных способностей датчика, чтобы захватывать сигналы и предоставлять соответствующий выходной сигнал. Типичными спецификациями являются "диапазон", "точность", "разрешение", "повторяемость", "дрейф", "гистерезис", "стабильность", "время реакции", "время стабилизации", "требуемое напряжение", "потребляемый ток", "выход" и "оценка шума датчика".
Автоматически означает без необходимости вмешательства оператора (человека). Автоматически не исключает того, что иногда оператор инициирует или прекращает действие, пока процесс может выполняться без необходимости вмешательства оператора.
Центральный процессор или CPU - это электронная схема в компьютерной системе, которая выполняет инструкции компьютерной программы посредством выполнения основных арифметических, логических, управляющих операций и операций ввода/вывода (I/O), указанных инструкциями. Термин "CPU" может ссылаться на материальный (единственный) процессор, более конкретно на его блок обработки и блок управления (CU), но может также ссылаться на множество процессоров распределенных по (беспроводной) сетевой системе, работающих как часть одного единственного процессора (например, частично присутствует на тракторе, машине и удаленном сервере через облачную систему).
Варианты осуществления изобретения
В варианте осуществления автономного трактора согласно изобретению сцепка выполнена с возможностью перемещения прицепленной сельскохозяйственной машины между двумя позициями, первая из которых является позицией, сбоку по отношению к трактору для культивации земли, и вторая из которых является позицией над трактором. В этом варианте осуществления сельскохозяйственная машина может быть поднята к и от обрабатываемой земли между позицией для обработки земли и позицией над трактором, далеко от земли. Предпочтительно, вторая позиция, т.е., позиция над трактором, совпадает с занимаемой площадью трактора. В этом предпочтительном варианте осуществления машина может быть поднята фактически прямо над трактором. Это является очень полезным во время транспортировки трактора с прицепленной машиной по дороге, поскольку это означает, что ширина в направлении транспортировки не больше ширины трактора, а также, поскольку сохранение большого веса, такого как вес сельскохозяйственной машины прямо над объектом, ставит облегченные условия по механике по сравнению с ситуацией сохранения большого веса под углом (т.е., менее 90°, например, 45°) над этим объектом.
В другом варианте осуществления трактор имеет первый комплект колес, соответствующих перемещению при пересечении сельскохозяйственных угодий, и второй комплект колес, соответствующих транспортировке трактора по дороге. Хотя один комплект колес может быть использован в тракторе изобретения, например, когда скомпонован так, что они могут вращаться таким образом, что их ось испытывает поворот на 90°, чтобы удовлетворять перпендикулярным направлениям движения, было найдено полезным использовать два комплекта колес, каждый комплект соответствует либо направлению движения при пересечении сельскохозяйственных угодий, либо направлению транспортировки по дороге. В дополнительном варианте осуществления второй комплект колес выполняется с возможностью быть подвижным на расстояние от обрабатываемой земли, чтобы предотвращать соприкосновение с ней, когда трактор пересекает сельскохозяйственные угодья.
В еще одном варианте осуществления, в котором соединительное устройство содержит буксирную сцепку, так что трактор может быть втащен на прицеп или присоединен для буксировки в качестве прицепа, буксирная сцепка выполняется с возможностью помещения в вертикальную позицию, когда трактор пересекает сельскохозяйственные угодья.
В еще одном варианте осуществления сельскохозяйственная машина имеет фиксированную длину, по меньшей мере, 3 метра. Этот вариант осуществления имеет преимущество наличия умеренно большой рабочей ширины, в то же время все еще являясь приспособленным для транспортировки по дороге без необходимости складывания. Хотя складывающаяся большая сельскохозяйственная машина является обычной технологией, она ведет к сложной и дорогостоящей машине, подверженной потере надежности вследствие увеличения в числе деталей.
В еще одном варианте осуществления, при этом трактор содержит центральный процессор (CPU) для приема входных сигналов от одного или более датчиков и для управления движением трактора на основе входных сигналов для того, чтобы избегать препятствия, и при этом каждая из сельскохозяйственных машин из группы содержит один или более дополнительных датчиков для обнаружения препятствий, присоединение сельскохозяйственной машины содержит функциональное присоединение одного или более дополнительных датчиков к CPU и автоматическое предоставление данных в CPU, касающихся местоположения каждого из одного или более дополнительных датчиков на сельскохозяйственной машине и одной или более спецификаций каждого из этих одного или более дополнительных датчиков. Заявитель признал, что значительное улучшение может быть получено в области обнаружения препятствия. Хотя известно на уровне техники использование датчиков на автономном транспортном средстве для обнаружения препятствия, а также использование датчиков на части трактора, которая удерживает фактическую почвообрабатывающую машину (являющуюся частью специализированного трактора), внимание не было уделено небольшим универсальным тракторам, которые изобретены для соединения с всевозможными различными сельскохозяйственными машинами. Заявитель осознал, что является полезным в такой ситуации то, что присоединение сельскохозяйственной машины содержит функциональное соединение датчиков присоединенной сельскохозяйственной машины с CPU трактора и автоматическое предоставление данных в CPU этого трактора, касающихся местоположения каждого из одного или более дополнительных датчиков на сельскохозяйственной машине и одной или более спецификаций каждого из этих одного или более дополнительных датчиков. Это означает, что датчики сельскохозяйственной машины объединяются в систему таким образом, что система в целом может работать автономно лучшим возможным образом.
В дополнительном варианте осуществления выходной сигнал датчика находится под управлением CPU.
В другом дополнительном варианте осуществления это управление перемещением трактора, вычисляемое посредством CPU, дополнительно основывается на одном или более окружающих обстоятельствах для трактора. Предпочтительно окружающие обстоятельства выбираются из группы, содержащей 1) присутствие сельскохозяйственной машины рядом с датчиком, 2) тип присутствующей сельскохозяйственной машины, 3) рабочие условия сельскохозяйственной машины, 4) присутствие второго автономного трактора, 5) физические свойства обрабатываемой земли, 6) погодные условия, 7) присутствие человека поблизости от трактора, 8) тип упомянутого человека.
Способ согласно изобретению может быть применен с помощью любого из вышеописанных вариантов осуществления трактора. В частности, в предпочтительном варианте осуществления сельскохозяйственная машина во время транспортировки по дороге находится в позиции над трактором, и в позиции, поперечной трактору при культивации земли.
Изобретение теперь будет дополнительно объяснено с помощью следующих чертежей.
Примеры
Фиг. 1 представляет собой схематичный вид сверху для автономного трактора.
Фиг. 2 представляет собой схематичный вид сверху для автономного трактора на фиг. 1 с сельскохозяйственной машиной в поднятой позиции.
Фиг. 3 представляет собой схематичный вид сбоку трактора, соответствующего фиг. 1.
Фиг. 4 представляет собой схематичный вид сбоку трактора, соответствующего фиг. 2.
Фиг. 5 представляет собой схематичный вид альтернативного автономного трактора.
Фиг. 6 представляет собой схематичный вид двух автономных тракторов, буксируемых посредством управляемого человеком трактора, служащего в качестве грузового автомобиля для перевозки по дороге для транспортировки по дороге.
Фиг. 7 представляет собой схематичный вид альтернативной компоновки комбинации, которая показана на фиг. 6.
Фиг. 8 представляет собой схематичный вид дополнительной альтернативной компоновки комбинации, которая показана на фиг. 6 и 7.
Фиг. 9 представляет собой пример автономного трактора, подходящего для автономной транспортировки по дороге.
Фиг. 10 схематично показывает внедрение различных датчиков в соответствии с изобретением.
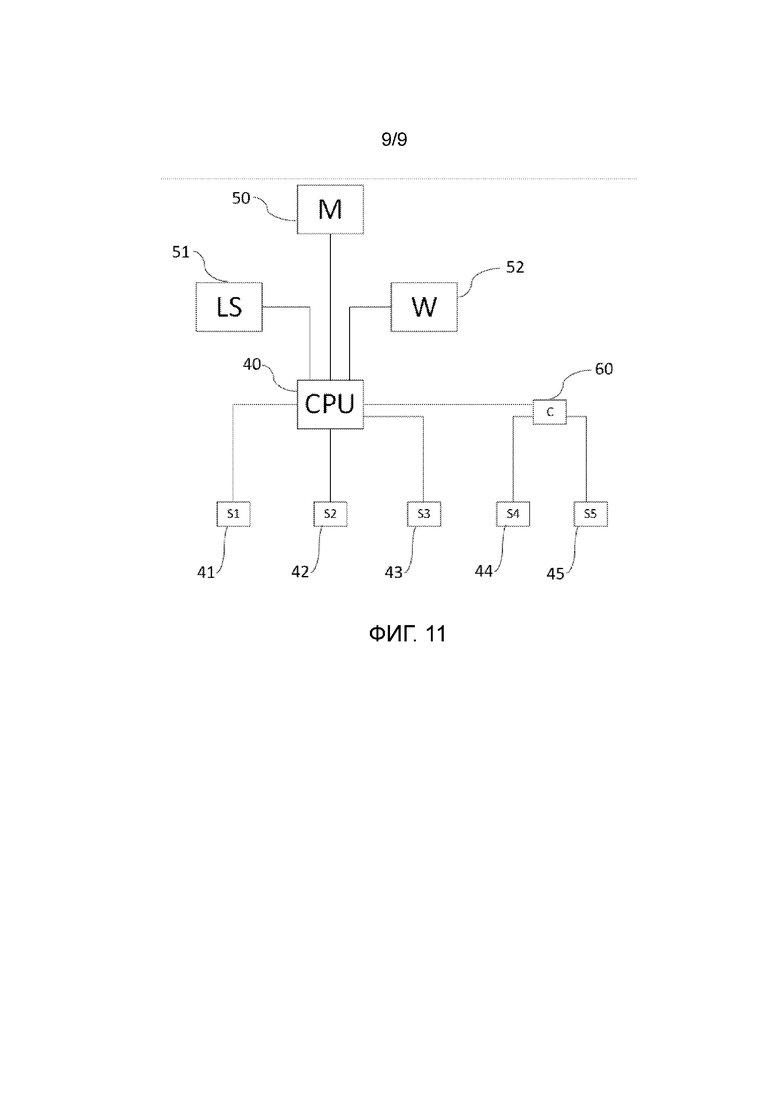
Фиг. 11 схематично показывает компоновку датчиков и CPU.
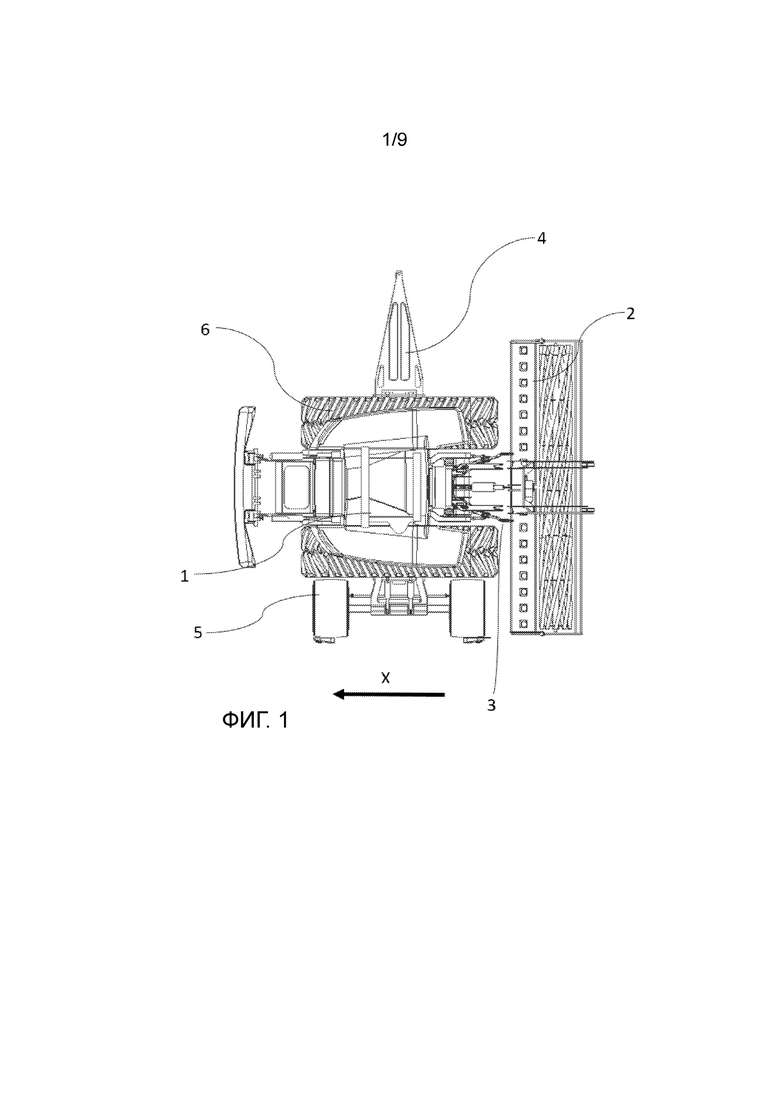
Фиг. 1
Фиг. 1 является схематичным видом сверху для автономного трактора 1 для автономного пересечения сельскохозяйственных угодий. Трактор пересекает сельскохозяйственные угодья в направлении, указанном как X. На его заднем конце к трактору прицеплена через обычную треугольную сцепку 3 активная борона 2. Треугольник имеет стандартные габариты и приводную ось, так что различные широко распространенные сельскохозяйственные машины могут быть прицеплены к трактору. Во время автономного пересечения сельскохозяйственных угодий в направлении X активная борона опирается о землю для ее культивации. Трактор имеет внутренний двигатель (не изображен), который приводит в движение колеса 6 и активную борону. Чтобы быть уверенным, что трактору в принципе не будут мешать какие-либо препятствия, передняя сторона снабжается несколькими датчиками (не изображены) для обнаружения таких препятствий при пересечении сельскохозяйственных угодий. Сбоку трактор снабжается буксирной сцепкой 4 и напротив ее вторым комплектом колес 5. Буксирная сцепка и второй комплект колес не используются, когда трактор пересекает сельскохозяйственные угодья. Они служат для помощи в транспортировки трактора по дороге. Чтобы предоставлять возможность этого, буксирная сцепка может быть использована для присоединения трактора к грузовому автомобилю для дорожной перевозки для транспортировки трактора по дороге, тогда как комплект колес 5 действует для обеспечения поддержки качения. Согласно изобретению, направление движения трактора для пересечения сельскохозяйственных угодий (X) является перпендикулярным направлению движения, когда трактор транспортируется по дороге. Последнее направление указано на фиг. 2.
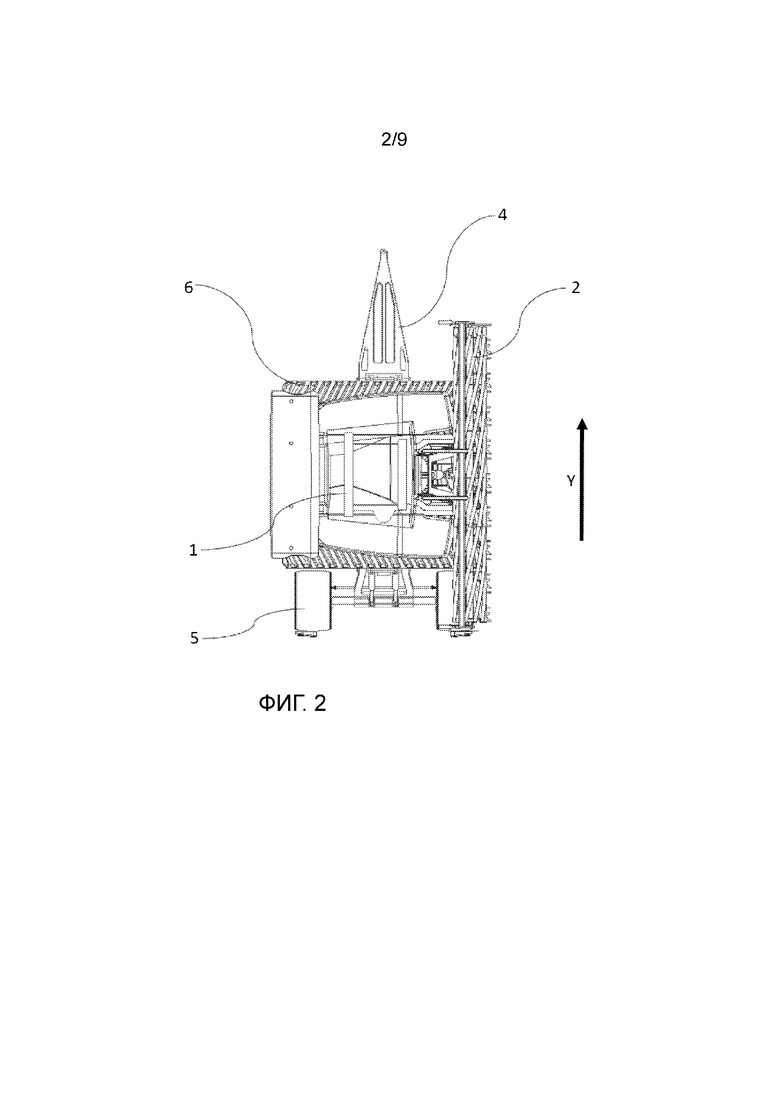
Фиг. 2
Фиг. 2 представляет собой схематичный вид сверху для автономного трактора на фиг. 1 с сельскохозяйственной машиной 2 в поднятой позиции. Сцепка 3 функционирует, чтобы перемещать прицепленную борону между двумя позициями (не исключающими то, что борона может быть помещена в любую промежуточную позицию), первая из которых является позицией, поперечной трактору для культивации земли (как изображено на фиг. 1 и 3), и вторая из которых является позицией над трактором. Эта позиция изображена на фиг. 2. Соответствующий боковой вид показан на фиг. 4. В результате принятия второй позиции над трактором вторая позиция совпадает с занимаемой площадью трактора, т.е., занимаемая площадь бороны перекрывается полностью (по ширине трактора) с занимаемой площадью трактора. Результатом является то, что комбинация в направлении транспортировки, указанном как Y, является не более широкой по сравнению с шириной самого трактора.
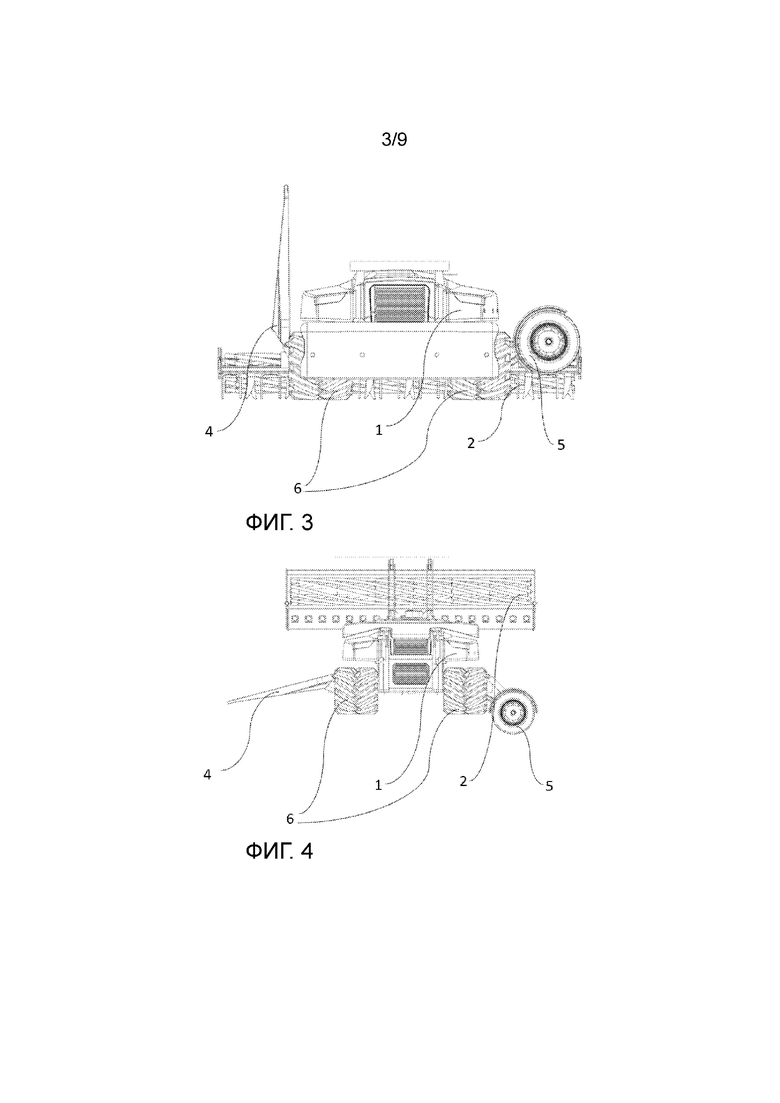
Фиг. 3
Фиг. 3 представляет собой схематичный вид сбоку трактора, соответствующего фиг. 1. В этом виде сбоку комплект колес 5 и буксирная сцепка 4 размещаются в поднятой позиции с тем, чтобы не мешать автономной работе трактора.
Фиг. 4
Фиг. 4 представляет собой схематичный вид сбоку трактора, соответствующего фиг. 2. В этом виде сбоку комплект колес 5 и буксирная сцепка 4 размещаются в опущенной позиции с тем, чтобы иметь возможность и поддерживать грузовую автоперевозку трактора. Буксирная сцепка используется для присоединения к управляемому человеком грузовому автомобилю. Колеса 5 служат для обеспечения опоры качения трактора во время грузовой автоперевозки (см. фиг. 6, 7 и 8 для сочетания автономных тракторов с управляемым человеком грузовым автомобилем для автоперевозки).
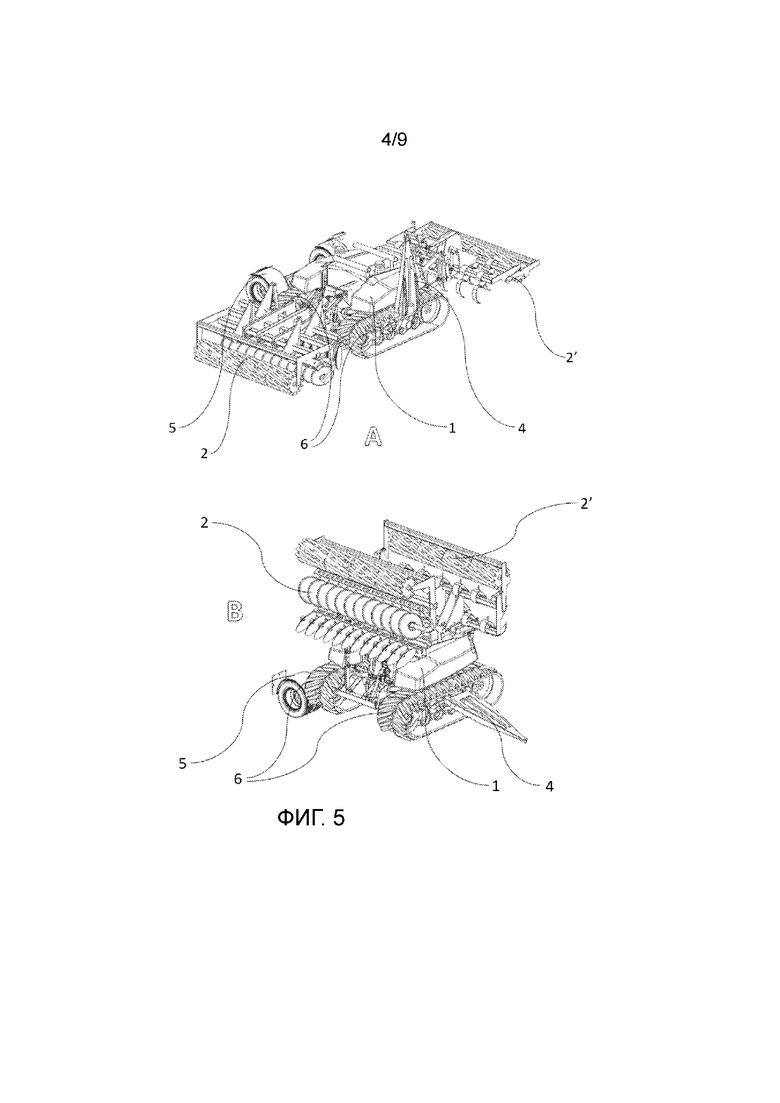
Фиг. 5
Фиг. 5, состоящая из фиг. 5A и 5B, предоставляет схематичный вид альтернативного автономного трактора 1. На фиг. 5A трактор показан в режиме "культивации" с прицепленными к переднему концу и заднему концу сельскохозяйственными машинами 2 и 2'. Буксирная сцепка 4 и колеса 5 находятся в поднятой позиции с тем, чтобы не мешать культивации сельскохозяйственных угодий. Фиг. 5B показывает тот же трактор с машинами 2 и 2' в поднятой позиции, и буксирной сцепкой 4 и колесами 5 в опущенной позиции, предоставляющими возможность перевозки по дороге. Как может быть видно, преимуществом отсутствия кабины для оператора-человека является то, что машины могут быть подняты полностью в вертикальную позицию, приводя к наименьшей возможной ширине во время грузовой перевозки по дороге, а также приводя к менее строгим механическим требованиям для сцепок: усилия, оказываемые на эти сцепки во время транспортировки, гораздо меньше по сравнению с тем, когда машины находятся прямо над сцепками, в сравнении с ситуаций, в которой машины прицепляются под углом, например, 45°.
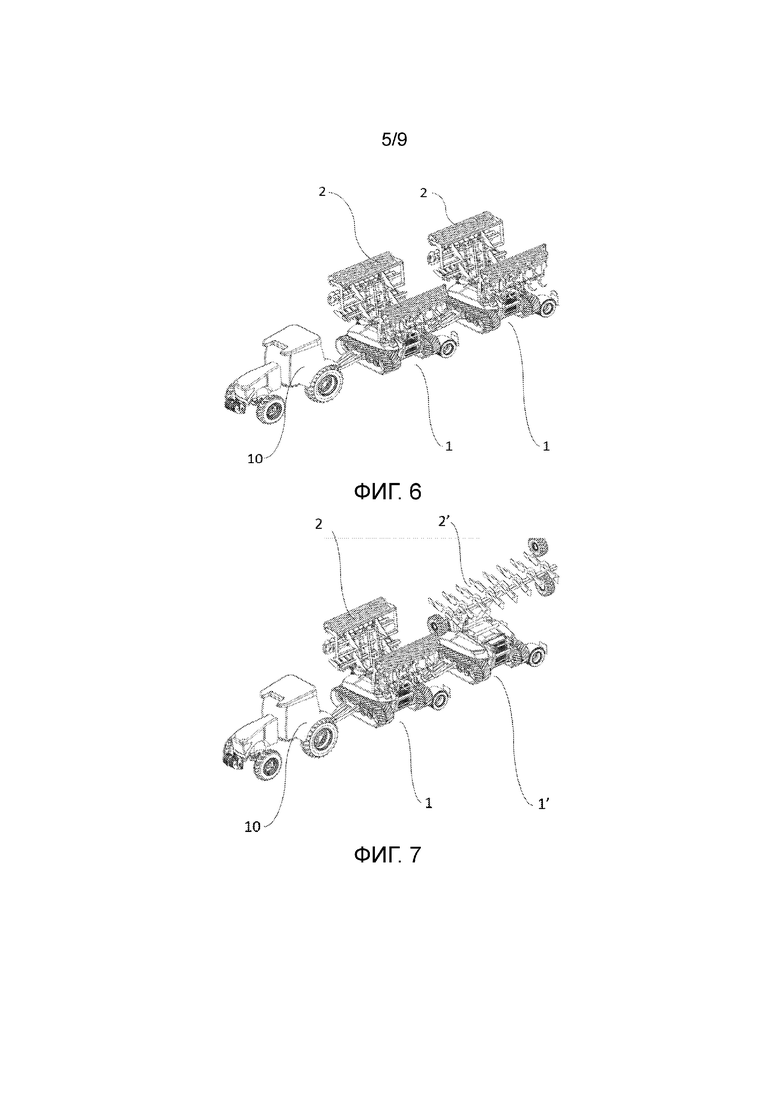
Фиг. 6
Фиг. 6 представляет собой схематичный вид двух автономных тракторов 1, который изображен на фиг. 5, буксируемых посредством управляемого человеком трактора 10, служащего в качестве грузовика для грузовой автоперевозки для транспортировки по дороге. Оба трактора 1 имеют сельскохозяйственные машины, поднятые в вертикальную позицию, чтобы обеспечивать наименьшую возможную ширину.
Фиг. 7
Фиг. 7 представляет собой схематичный вид альтернативной компоновки комбинации, которая показана на фиг. 6. В этом варианте осуществления трактор 10 буксирует два автономных трактора 1 и 1', к которым прицеплены различные сельскохозяйственные машины.
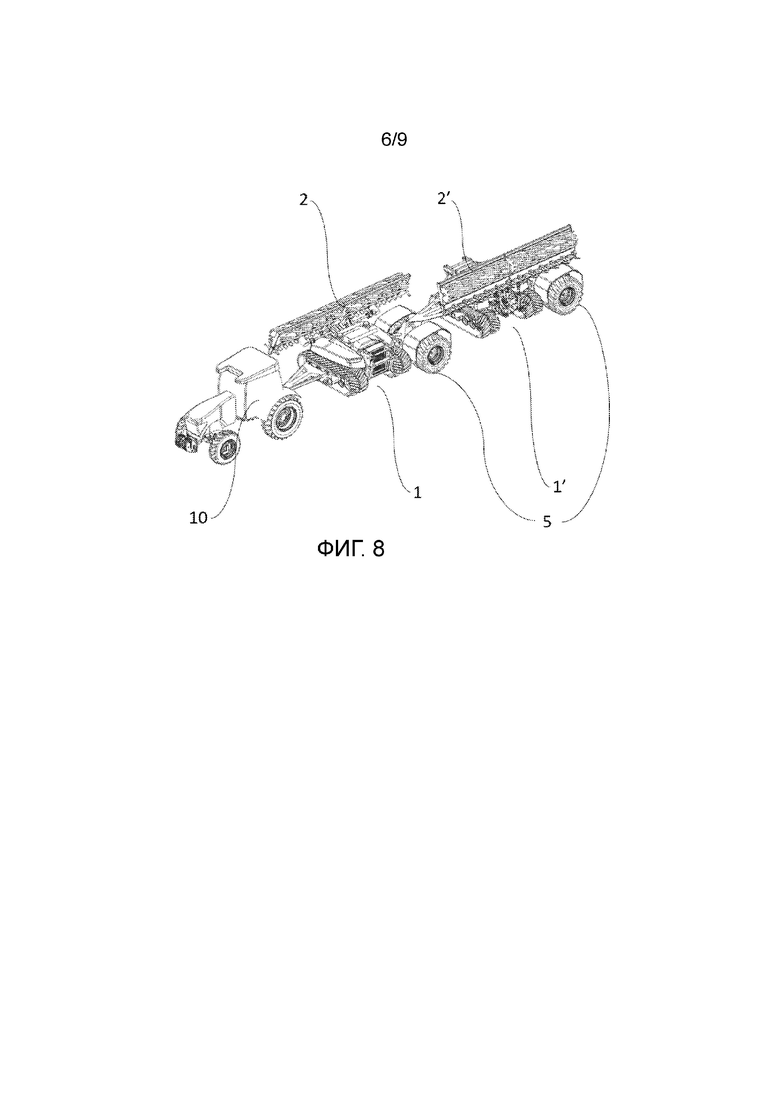
Фиг. 8
Фиг. 8 представляет собой схематичный вид дополнительной альтернативной компоновки комбинации, которая показана на фиг. 6 и 7. В этом сочетании буксирные сцепки 4 и комплект 5 колес размещаются на противоположных сторонах каждого трактора (по сравнению друг с другом), предоставляя преимущество в том, что сельскохозяйственные машины во время транспортировки по дороге присутствуют на противоположных сторонах каждого трактора. Это уменьшает риск того, что машины механически препятствуют транспортировке по дороге.
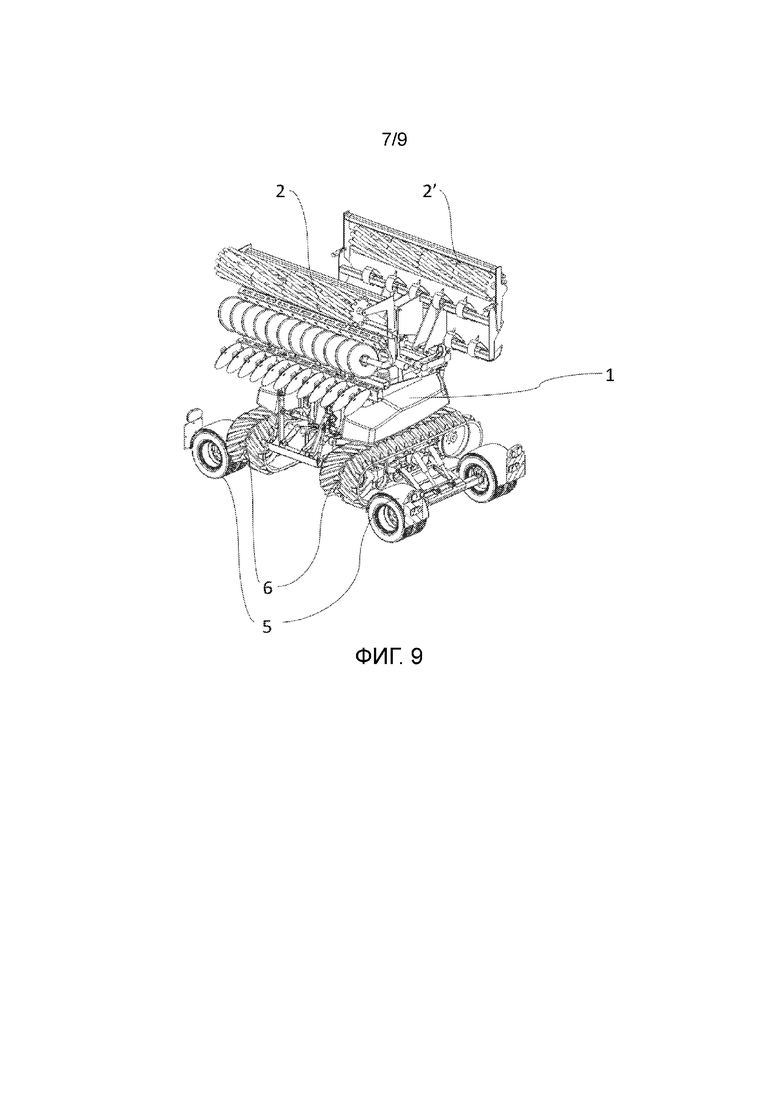
Фиг. 9
Фиг. 9 схематично изображает пример автономного трактора, подходящего для автономной транспортировки по дороге. В этом варианте осуществления, по меньшей мере, одна из осей колес 5 приводится в действие посредством мотора трактора, и эта ось, и/или другая ось, может быть размещена в качестве рулевой оси, которая может быть использована для навигации по дороге. Технология для автономной транспортировки/движения этого трактора по дороге может быть такой же, что и технология наших дней, используемая для автономных автомобилей.
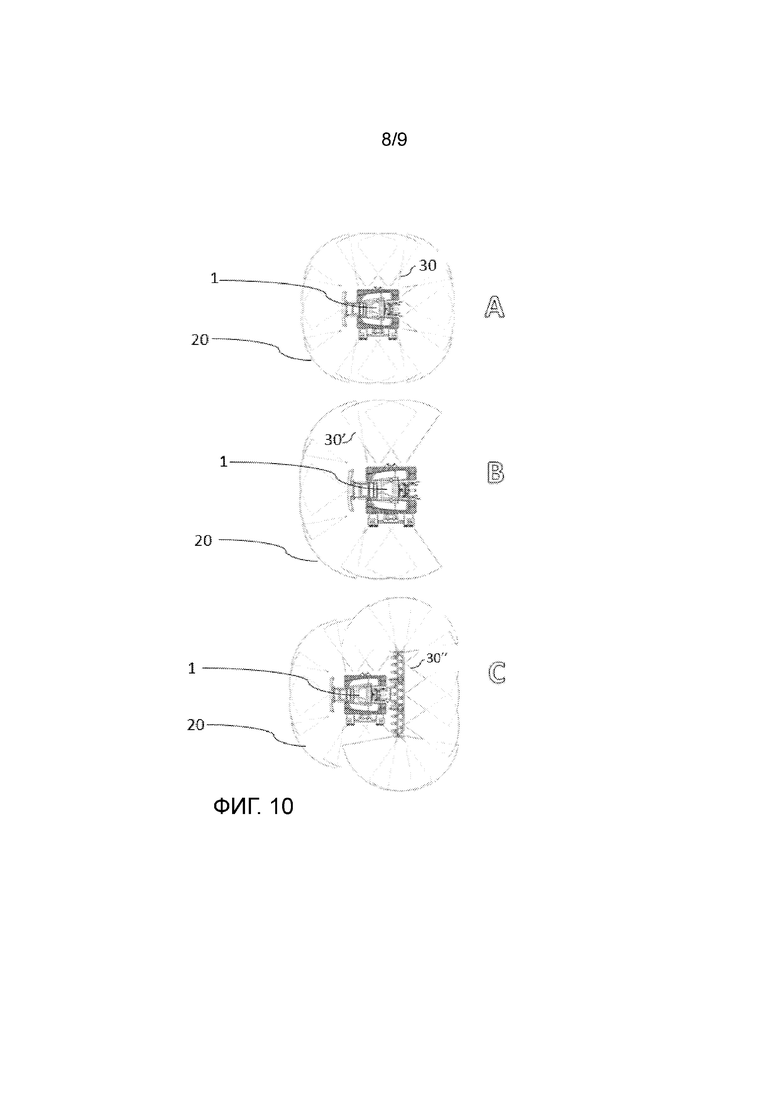
Фиг. 10
Фиг. 10, содержащая вспомогательные чертежи 10A, 10B и 10C, схематично показывает внедрение различных датчиков в соответствии с изобретением. На фиг. 10A изображен автономный трактор без сельскохозяйственной машины, прицепленной к нему. Датчики (не показаны) создают виртуальное ограждение 30 в области 20. Если препятствие, например, человек, обнаруживается в виртуальном ограждении 30, CPU будет реагировать, чтобы управлять движением трактора для избегания наезда на человека, например, останавливая машину, или (предполагая) замедление и в то же время предоставляя световой и звуковой сигнал, чтобы предупреждать человека поблизости от трактора.
Фиг. 10B показывает ситуацию, в которой сельскохозяйственная машина 2 присоединена к трактору (сама машина 2 не изображена на фиг. 10B по причинам прозрачности; см. фиг. 10C для присутствующей фактической машины 2). В соответствии с изобретением, как только машина (электронно) присоединяется к CPU трактора (что может быть посредством аппаратного соединения с помощью разъема/ISOBUS и т.д. или посредством беспроводного соединения), CPU автоматически снабжается данными, касающимися местоположения каждого из одного или более дополнительных датчиков на сельскохозяйственной машине и одной или более спецификаций каждого из этих одного или более дополнительных датчиков. В этом варианте осуществления CPU автоматически выключает датчики трактора, которые обнаруживают сельскохозяйственную машину, приводя к скорректированному виртуальному ограждению 30' (как изображено на фиг. 10B). Это виртуальное ограждение 30' фактически является тем же ограждением, что и 30, минус часть, обращенная к сельскохозяйственной машине. После присоединения CPU также автоматически включает датчики сельскохозяйственной машины. Это приводит к виртуальному ограждению 30'', как изображено на фиг. 10C. Как следствие, сочетание трактора и машины может работать с объединенными датчиками на тракторе и машине, по сути, комбинация трактора и сельскохозяйственной машины "выглядит" как единый модуль для пересечения сельскохозяйственных угодий.
На практике может быть так, что несколько независимых тракторов будут пересекать один и тот же участок сельскохозяйственных угодий одновременно для совместной культивации земли. Если так, является важным, чтобы различные тракторы (плюс машины) не видели друг друга как постоянные препятствия, что может привести к ситуации, когда они реагируют друг на друга, останавливаются и не продолжают работать. Таким образом, как только различные автономные тракторы работают близко друг к другу, должен быть обмен данными между комбинациями о позиции, скорости и направлении движения, а также о габаритах, которые имеет оборудование. Датчики могут быть полезными в этом отношении.
Другим аспектом изобретения является то, что тракторы могут быть приспособлены различать между (любопытными) наблюдателями и оператором. Тогда как машина должна быть на 100% безопасно защищенной для широкой публики, оператор иногда должен осматривать трактор и/или машину близко, чтобы в реальном времени регулировать и проверять результат работы по культивации, выполненной машиной. Это может, например, вести к системе, в которой, если обычный наблюдатель обнаруживается в пределах 10 метров от трактора с некоторой скоростью, машина начинает предоставлять световые и звуковые сигналы или даже останавливается, если наблюдатель находится в пределах 5 метров от трактора, тогда как для оператора такие действия предпринимаются только при 3 и 1 метре, соответственно, когда трактор движется с той же скоростью. Оператор может, например, быть распознан посредством беспроводной связи между CPU трактора и смартфоном, или другим карманным устройством оператора, или посредством обнаружения физического свойства оператора (такого как радужная оболочка глаза, лицо или любая другая физическая характеристика). Также, выходные сигналы одного или более датчиков, присоединенных к оператору, могут быть использованы в качестве входных данных для CPU. В варианте осуществления, как только оператор присутствует в виртуальном ограждении, он (или она) принимает сигнал об этом. Это улучшает безопасность рабочих условий.
Фиг. 11
Фиг. 11 схематично изображает компоновку датчиков 41-45 и CPU 40 в комбинации трактора и сельскохозяйственной машины согласно изобретению. Датчики 41, 42 и 43 являются частью трактора и имеют фиксированное соединение с CPU 40. Они предоставляют выходной сигнал в CPU, который, в свою очередь, управляет и приводит в действие мотор 50 трактора ("M"), системой 51 светового и звукового предупреждения ("LS") и/или (виртуальным) рулевым колесом 52 ("W"). Датчики 44 и 45 являются частью сельскохозяйственной машины и соединяются с CPU через соединительное устройство 60.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОНОМНЫЙ ТРАКТОР И СПОСОБ КУЛЬТИВАЦИИ СЕЛЬСКОХОЗЯЙСТВЕННЫХ УГОДИЙ С ПОМОЩЬЮ ТАКОГО ТРАКТОРА | 2019 |
|
RU2810297C2 |
| ТРАКТОР И СПОСОБ ЭКСПЛУАТАЦИИ ТРАКТОРА | 2021 |
|
RU2832217C2 |
| КОЛЕСНАЯ МОДИФИКАЦИЯ ГУСЕНИЧНОГО ТРАКТОРА | 2010 |
|
RU2432293C1 |
| ТРАКТОР | 2008 |
|
RU2389615C1 |
| СЦЕПНОЕ УСТРОЙСТВО ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ | 2020 |
|
RU2817639C2 |
| Способ лесозаготовок и комплекс машин для его осуществления | 1980 |
|
SU965397A1 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ ТРАКТОР | 2013 |
|
RU2545216C1 |
| Малогабаритное модульное транспортное средство | 2016 |
|
RU2657829C2 |
| Гидрорегулируемое буксирное устройство колёсного трактора | 2018 |
|
RU2728162C2 |
| РЕГУЛИРУЕМЫЕ ИСПОЛНИТЕЛЬНЫМ МЕХАНИЗМОМ ПРИКАТЫВАЮЩИЕ КАТКИ | 2014 |
|
RU2568474C1 |
Группа изобретений относится к сельскому хозяйству. Автономный трактор (1) для автономного пересечения сельскохозяйственных угодий содержит один или более датчиков для обнаружения препятствий при пересечении сельскохозяйственных угодий, сцепку (3) для сцепления сельскохозяйственной машины (2), выбранной из группы сельскохозяйственных машин, каждая из которых является выполненной с возможностью сцепления с трактором (1). Для присоединения трактора (1) к грузовому автомобилю для грузовой автоперевозки для транспортировки трактора (1) по дороге, трактор (1) сбоку снабжен соединительным устройством (4) и напротив него комплектом колес (5), с помощью которых направление движения (Х) трактора (1) для пересечения сельскохозяйственных угодий является перпендикулярным направлению движения, когда трактор (1) транспортируется по дороге. Способ культивации сельскохозяйственных угодий включает этапы, на которых присоединяют сельскохозяйственную машину (2) к автономному трактору (1), присоединяют трактор (1) с присоединенной к нему сельскохозяйственной машиной (2) к грузовому автомобилю для грузовой автоперевозки для транспортировки трактора (1) по дороге к участку сельскохозяйственных угодий, разгружают трактор (1) с грузового автомобиля для грузовой автоперевозки и предоставляют возможность трактору (1) автономно пересекать сельскохозяйственные угодья, в то время как сельскохозяйственная машина (2) культивирует землю. Обеспечивается облегчение практического использования автономного трактора. 2 н. и 11 з.п. ф-лы, 11 ил.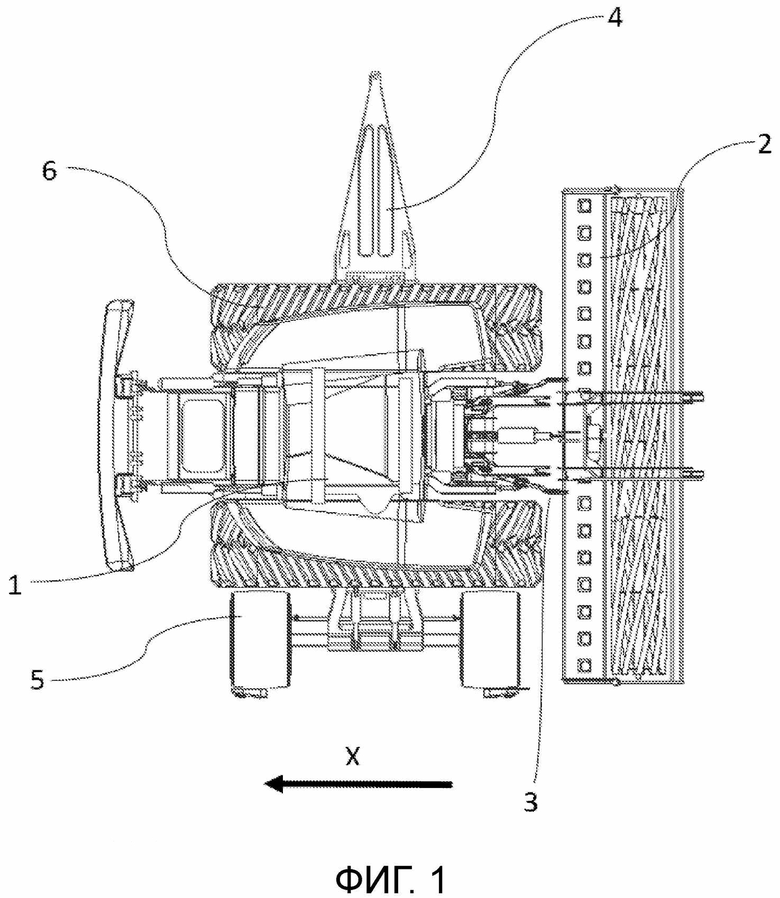
1. Автономный трактор для автономного пересечения сельскохозяйственных угодий, содержащий один или более датчиков для обнаружения препятствий при пересечении сельскохозяйственных угодий, сцепку для сцепления сельскохозяйственной машины, выбранной из группы сельскохозяйственных машин, каждая из которых является выполненной с возможностью сцепления с трактором, отличающийся тем, что для присоединения трактора к грузовому автомобилю для грузовой автоперевозки для транспортировки трактора по дороге, трактор сбоку снабжен соединительным устройством и напротив него комплектом колес, с помощью которых направление движения трактора для пересечения сельскохозяйственных угодий является перпендикулярным направлению движения, когда трактор транспортируется по дороге.
2. Автономный трактор по п. 1, отличающийся тем, что сцепка выполнена с возможностью перемещения прицепленной сельскохозяйственной машины между двумя позициями, первая из которых является позицией, поперечной трактору для культивации земли, а вторая – позицией над трактором.
3. Автономный трактор по п. 2, отличающийся тем, что вторая позиция совпадает с занимаемой площадью трактора.
4. Автономный трактор по любому из предшествующих пунктов, отличающийся тем, что трактор имеет первый набор колес, соответствующих перемещению при пересечении сельскохозяйственных угодий, и второй комплект колес, соответствующих транспортировке трактора по дороге.
5. Автономный трактор по п. 4, отличающийся тем, что второй комплект колес выполнен с возможностью перемещения от обрабатываемой земли, чтобы предотвращать соприкосновение с ней, когда трактор пересекает сельскохозяйственные угодья.
6. Автономный трактор по любому из предшествующих пунктов, отличающийся тем, что соединительное устройство содержит буксирную сцепку, при этом буксирная сцепка выполнена с возможностью расположения в вертикальной позиции, когда трактор пересекает сельскохозяйственные угодья.
7. Автономный трактор по любому из предшествующих пунктов, отличающийся тем, что сельскохозяйственная машина имеет фиксированную длину, по меньшей мере, 3 метра.
8. Автономный трактор по любому из предшествующих пунктов, отличающийся тем, что содержит центральный процессор (CPU) для приема входных сигналов от одного или более датчиков и для управления движением трактора на основе входных сигналов для того, чтобы избегать препятствия, при этом каждая из сельскохозяйственных машин из группы содержит один или более дополнительных датчиков для обнаружения препятствий, при этом присоединение сельскохозяйственной машины содержит функциональное присоединение одного или более дополнительных датчиков к CPU и автоматическое предоставление данных в CPU, касающихся местоположения каждого из одного или более дополнительных датчиков на сельскохозяйственной машине и одной или более спецификаций каждого из этих одного или более дополнительных датчиков.
9. Автономный трактор по п. 8, отличающийся тем, что выходной сигнал датчика находится под управлением CPU.
10. Автономный трактор по п. 8 или 9, отличающийся тем, что управление движением трактора, вычисляемое посредством CPU, дополнительно основывается на одном или более окружающих обстоятельствах для трактора.
11. Автономный трактор по п. 10, отличающийся тем, что окружающие обстоятельства выбираются из группы, содержащей 1) присутствие сельскохозяйственной машины рядом с датчиком, 2) тип присутствующей сельскохозяйственной машины, 3) рабочие условия сельскохозяйственной машины, 4) присутствие второго автономного трактора, 5) физические свойства обрабатываемой земли, 6) погодные условия, 7) присутствие человека поблизости от трактора, 8) тип упомянутого человека.
12. Способ культивации сельскохозяйственных угодий, включающий этапы, на которых присоединяют сельскохозяйственную машину к автономному трактору по любому из предшествующих пунктов, присоединяют трактор с присоединенной к нему сельскохозяйственной машиной к грузовому автомобилю для грузовой автоперевозки для транспортировки трактора по дороге к участку сельскохозяйственных угодий, разгружают трактор с грузового автомобиля для грузовой автоперевозки и предоставляют возможность трактору автономно пересекать сельскохозяйственные угодья, в то время как сельскохозяйственная машина культивирует землю.
13. Способ по п. 12, отличающийся тем, что сельскохозяйственная машина во время транспортировки по дороге находится в позиции над трактором, и в боковой позиции по отношению к трактору во время культивации земли.
| US 2017251589 A1, 07.09.2017 | |||
| Центробежный массообменный аппарат | 1981 |
|
SU1031477A1 |
| Колесно-гусеничный трактор | 1973 |
|
SU554181A1 |
| Способ количественного определения галоидсодержащих солей сульфония | 1976 |
|
SU645075A1 |
| Сельскохозяйственный агрегат | 1980 |
|
SU946423A1 |
| Агрегат для сельскохозяйственных работ | 1986 |
|
SU1820494A1 |
| DE 19752958 A1, 10.06.1998 | |||
| CN 101058320 A, 24.10.2007 | |||
| US 4452496 A, 05.06.1984 | |||
| US 5260875 A, 09.11.1993. | |||
