и их устранение, так как контролируется только головной (начальный) участок трубопровода, а режим каждого участка после головного определяется местной плотностью гидросмеси, уровнем воды в трубопроводе желоба, транспортной скоростью и может оказаться критичесКИМ, тогда как на других участках, например на головном, будет сохраняться нормальный режим. Закупорка на любо участке может появиться при наличии утечки воды из трубопровода и снижеНИИ транспортной скорости гидросмеси на участке ниже критической.
Цель изобретения - повышение надежности и точности контроля и р.егулирования режима.
Поставленная цель достигается тем, что устройство снабжено элементами сравнения, звеньями запаздывания сигнала по тракту передачи, пороговыми элементами и управляемым органом подачи воды, причем звенья запаздывания подключены входами к выходам соответствующих датчиков веса, размещенных в начале контролируемых участков, а выходами - к первым входам эле ментов сравнения этих же участков, вторые входы которых соединены с выходами датчиков веса последующих, по ходу движения гидросмеси участков, а выходы через пороговые элементы автономными каналами связаны с исполнительными механизмами управляемого органа подачи воды. А также тем,что управляемый орган подачи воды выполнен распределенным по длине трубопровода в виде подключенных к напорному водопроводу участковых патрубков с насадками и управляемыми задвижками связанными с исполнительными механизмами
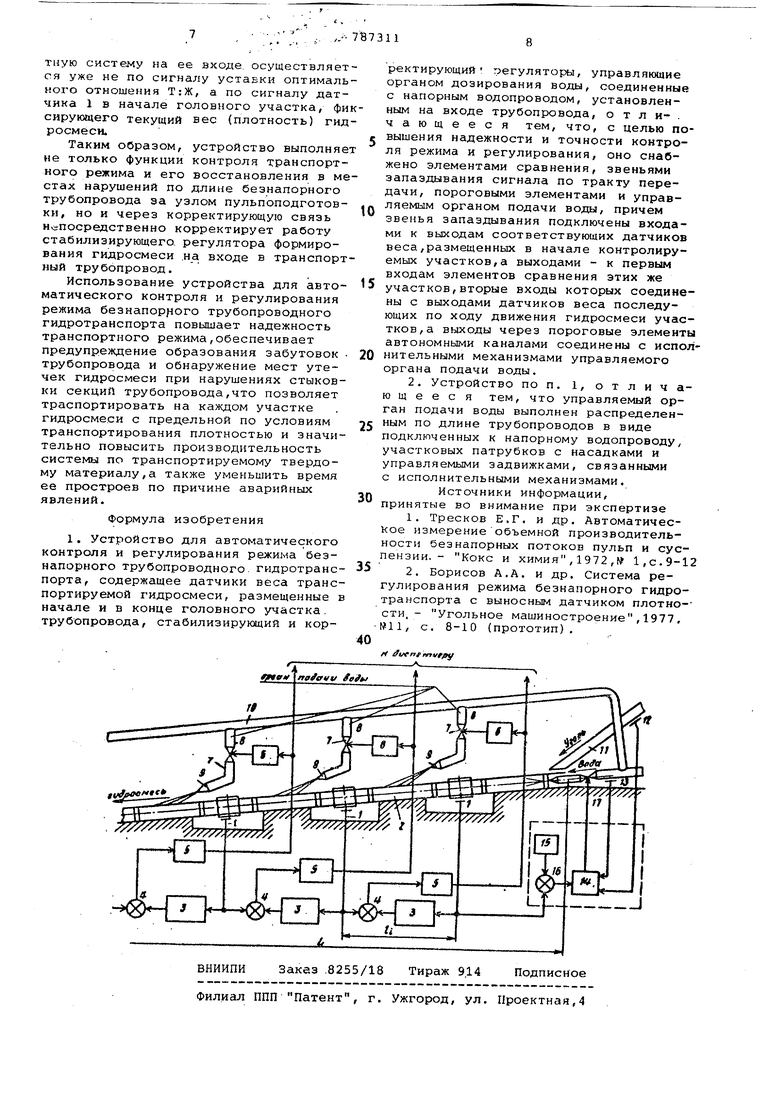
На чертеже изображена блок-схема устройства.
Устройство для автоматического контроля и регулирования режима безнапорного трубопроводного гидротранспорта включает в себя датчики 1 веса плотности или уровня,проходящей по трубо.проводу 2 гидросмеси,установленные на входе и выходе каждого контролируемог i-ro участка длиной 1 , Число контролируемых участков определяется таким образом, чтобы охватить одновременно для контроля транспортный режим по всей длине трубопровода безнапорного гидротранспорта, как объекта с распределенными параметрами, и возможностью восстановления его до расчетного при нарушениях. Выходы датчиков 1 веса, установленных в начале контролируемог i-ro участка, подключены ко входамсоответствующих звеньев 3 запаздывания (лииии задержки) для задержки выходных сигналов датчиков 1 на время движения элементарного контрольного объема гидросмеси по длине i -го , участка.
Выходы звеньев 3 запаздывания участка подключены к первым входам
элементов 4 сравнения соответствующих участков, вторые входы которых соединены с выходами датчиков 1 веса, установленных в конце i-ro участка, являющиеся одновременно и начальными для i+l-fo участка. Выходы элементов 4 сравнения i-ro участка через пороговые элементы 5 автономными каналами подключены ко входам исполнительных механизмов 6, управляющих задвижками 7 управляемого органа для подачи воды в i-ый участок трубопровода.
Орган подачи воды, выполненный распределенным по всей длине L безнапорного трубопровода 2 желоба,включает участковые патрубки 8 с насадками 9 для формирования струи, подключенные к напорному водопроводу 10.
На чертеже показаны также желоб 11 .для подачи твердого материала (угля) датчики 12 и 13 веса твердого материала и расхода воды, выходы которых подключены ко входам стабилизирующего регулятора 14 начальной плотности (соотношения твердого к жидкому Т:Ж), вырабатывающего сигнал для подготовки гидросмеси с плотностью, равной заданной по уставке, выдаваемой задатчиком 15, выход которого подключен к первому входу элемента 16 сравнения второй вход которого соединен с выходом датчика 1 веса, установленного в начале головного участка трубопровода и входом звена 3 запаздывания этого участка. Выход элемента 16 сравнения подключен к одному из входов регулятора 14, выход которого управляет органом 17 дозирования воды на входе в трубопровод. Задатчик 15 и элемент б сравнения образуют корректирующий регулятор. Реализация узлов устройств кроме датчиков веса и исполнительных механизмов, может быть осуществлена на стандартных интегральных микросхемах серии К 140 и К 155. Элементы 4 сравнения и пороговые элементы 5 могут быть выполнены на операционных усилителях типа К1УТ 401В. Звенья 3 запаздывания могут быть построены в виде набора элементов памяти по схема .динамических запоминающих устройств (ДЗУ), в которых обеспечивается слежение за амплитудой сигналов дат.чиков веса и последующее хранение (запоминание) текущего значения этого .сигнала по команде,приходящей от двоичных счетчиков.ДЗУ может быть выполнено на операционных усилителях К1УТ 401В,счетчики - на К155ИЕ.Время восстановления начального состояния счетчика совпадает с временем запаздывания и может перестраиваться.Подключение входов ДЗУ к схеме сравнения осуществляется коммутатором, выполненным по схеме распределителя импульсов на К155ИЕ, с частотой достаточной для воспроизведения процесса на участке по выборкам сигнала датчика .веса, хранимых в ДЗУ. Устройство монтируется в виде отдельного блока/устанавливаемого в пункте узла подготовки гидросмеси,и сопрягается с регулятором соотношения твердой и жидкой фаз для формирования гидросмеси с расчетной(заданной)плотностью нэ входе в транспортный трубопровод. Датчики веса представляют собой стандартные датчики, работающие на объемно-весовом принципе. Устройство работает следующим образом. Нормальный режим по плотности гидр смеси формируется регулятором 14, задающим соотношения Т:Ж дозированием воды, органом 17 по уставке, выдаваем радатчиком 15, и сигналом датчика 12 веса твердого материала, поступающего по желобу 11 из забоя или бункера, и датчика 13 расхода воды на входе в. транспортный трубопровод. Однако транспортный режим на последующих участках безнапорного трубопровода распределенной системы, определяется местной консистенцией (плотностью), уровнем воды в трубопроводе, транспортной скоростью, круп ностью твердого материала в пульпе и может оказаться критическим, тогда как на других участках будет сохраняться нормальный режим. Поэтому при сохранении исправного состояния секций при нормальном режиме (отсутствие утечек и закупорок) транспортный режим каждого i-ro участка определяется автоматически по сигналу с датчика веса в начале i-ro участка и воспроиз ведения его на выходе соответствующег звена запаздывания по истечении времени t-, равного времени движения гидросмеси по трубопроводу от начального сечения к конечному сечению контролируемого i-ro участка. В нормальном режиме сигналы от дат чиков 1 веса, расположенных в начале каждого контролируемого i-ro участка ДЛИНОЙ ti. , поступают на входы соответ ствующих звеньев 3 запаздывания. По истечении времени -fc значения сигнало соответствующих режиму в конце 1-го участка,появятся на выходах датчиков 1,расположенных в конце 1-го участка являющихся одновременно и начальными для i4l-участка и на выходах звеньев 3 запаздывания этих же участков. При правильном выборе величины для 1-го участка в нормальном режиме значения сигналов, поступающих с выходов звень ев 3 запаздываний и концевых датчиков 1 соответственно на первый и второй входы элементов 4 сравнения, будут одинаковьвди в пределах ошибки воспро ведения режима на. этом участке. В это случае на выходах элементов 4 сравн ния рассогласования действительного воспроизводимого звеньями запаздыван режимов будут отсутствовать, а испол нительные механизмы 6, связанные автрломными каналами через пороговые элементы 5 с выходами элементов 4 сравнения, будут отключены. При сохранении рабочего состояния трубопровода всякие изменения режима в начале i-ro участка, сказывающиеся в конце этого участка через время запаздывания t (время движения гидросмеси на i-M участке), будут воспроизведены звеном запаздывания, так что, по-прежнему, на выходах элементов 4 сравнения сигналы рассогласования будут отсутствовать,и исполнительные механизмы 6 будут отключены, В случае появления закупорки (забутовки) трубопровода 2 или утечки жидкости из-за расстыковки секций по длине i-ro контролируемого участка, в начальном сечении i-ro участка будет сохраняться нормальный режим (до полной забутовки всего х-го участка), а в конце i-ro участка движение гидросмеси будет либо отсутствовать, либо текущий вес контрольного объема проходящей гидроамеси будет резко отличаться (уменьшится) от веса контрольного объема гидросмеси в начале -го участка. Поскольку звено 3 запаздывания на выходе будет воспроизводить через время t нормальный режим, существующий на входе участка, то величины сигналов от датчика 1 веса в конце участка, соответствующие нарушенному режиму, и с выхода звена 3, соответствующие нормальному режиму,если бы он сохранился, будут резко отличаться и на выходе элемента 4 сравнения появится сигнал рассогласования, превышающий порог срабатывания порогового элемента 5 . Срабатывая , пороговый элемент 5 включает исполнительный механизм 6, управляющий задвижкой 7 участкового патрубка 8 с насадкой 9, увеличивая подачу воды из водопровода 10 непосредственно в трубопровод для размыва струей жидкости забученного участка. Одновременно с включением исполнительного механизма вырабатываются сигналы диспетчеру с указанием места (номера уча(Стка) забутовки или утечки, или значительного нарушения транспортного режима. При нарушении режима в начале головного участка безнапорного трубопровода, когда действительная плотность гидросмеси в начале трубопровода превышает плотность, соответствующую оптимальному соотношению Т:Ж, формируемую регулятором 14, на корректирующий вход элемента 16 сравнения от датчика 1 в начлль ном сечении головного участка поступаЪт сигнал, уровень которого превьаиает , значение уставки, выдаваемой задатчиком 15. При этом на выходе элемента 16 сравнения появляется сигнал изменения зсшания стабилизируквдему регулятору на определенную величину, определяемую отклонением действительного веса (плотности) от веса (плотности) задаваемого уставкой, и дозирование воды в транспор
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического контроля и регулирования режима безнапорного трубопроводного гидротранспорта | 1981 |
|
SU1000359A2 |
| Устройство автоматического обнаружения неисправностей приводного регулирующего органа транспортного трубопровода | 1980 |
|
SU922002A1 |
| Устройство для управления водоснабжением участка гидрошахты | 1985 |
|
SU1275376A2 |
| Устройство для управления водоснабжением участка гидрошахты | 1982 |
|
SU1115020A1 |
| Устройство для контроля и управления насосной установкой гидротранспортной системы | 1980 |
|
SU882895A2 |
| Устройство для контроля и регулирования установки трубопроводного транспорта | 1980 |
|
SU925816A1 |
| Устройство для контроля и управления насосной установкой гидротранспортной системы | 1977 |
|
SU676515A1 |
| Способ защиты гидротранспортной установки от закупорки и устройство для его осуществления | 1975 |
|
SU687439A1 |
| Устройство для сгущения и регулирования плотности транспортируемой по трубопроводам гидросмеси | 1981 |
|
SU998261A2 |
| Устройство для управления землесосным снарядом | 1990 |
|
SU1721191A1 |
