(54) ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлический следящий привод | 1981 |
|
SU1000612A2 |
| Устройство для контроля параметров садки в методической кольцевой печи | 1985 |
|
SU1310604A1 |
| Электрогидравлический следящий привод | 1979 |
|
SU853204A1 |
| Электрогидравлический следящий привод | 1980 |
|
SU1048893A1 |
| Устройство для адресования электрического транспорта | 1978 |
|
SU1084216A1 |
| Фазогенераторное измерительное устройство | 1985 |
|
SU1339391A1 |
| Способ управления бульдозером и устройство для его осуществления | 1985 |
|
SU1339285A1 |
| Индуктивный преобразователь перемещений | 1986 |
|
SU1310617A1 |
| Устройство управления генератором импульсов при электроэрозионной обработке | 1985 |
|
SU1298016A1 |
| Вентильный электродвигатель | 1987 |
|
SU1415347A2 |
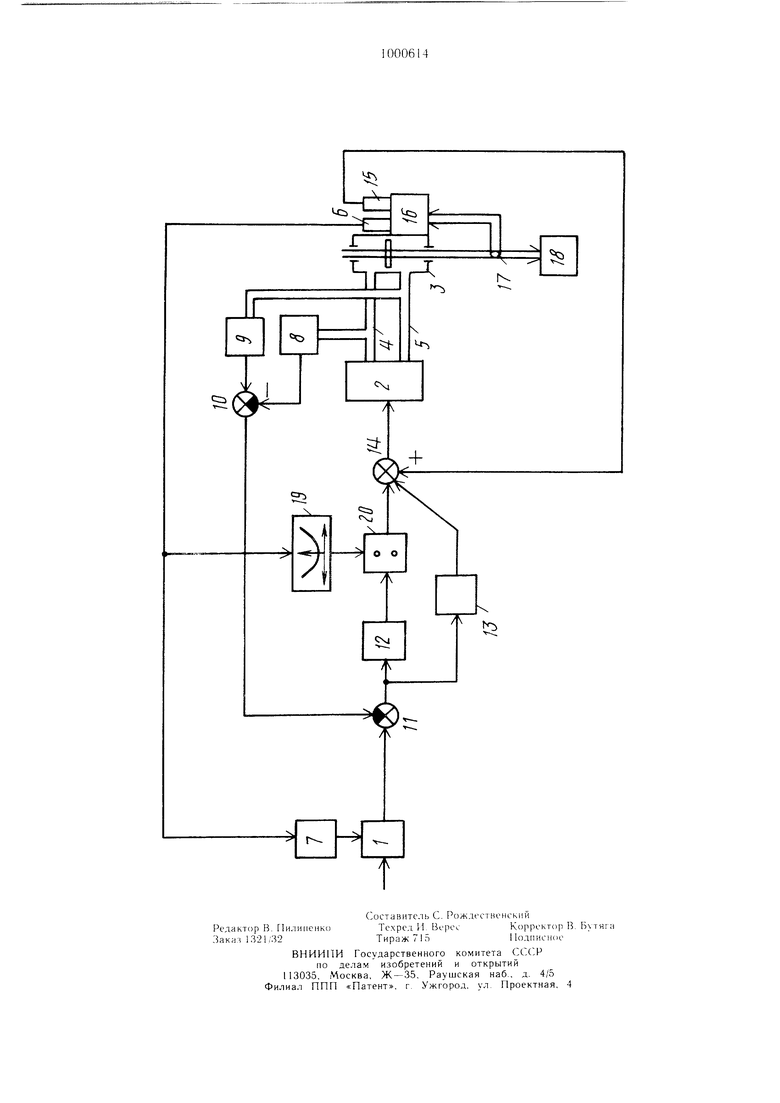
Изобретение относится к гидроавтоматике и .может быть использовано, например, в гидросистемах стендов-имитаторов движения транспортных средств. По основному авт. св. J4b 853204 известен электрогидравлический следяпдий привод, содержащий задающий блок, связанный с ним электрогидравлический усилитель с позиционным золотником, гидродвигатель, соединенный гидролиниями с золотником, и элек трические цепи отрицательной обратной связи по перепаду давлений в гидролиния.х и по положению гидродвигателя, подключенные через суммирующие и корректирующие устройства ко входу электрогидравлического усилителя, а также электрическую цепь положительной обратной связи по скорости гид родвигателя, выполненную в виде последовательно соединенны.ч кинематического преобразователя движения и тахогеператора, подключенного через су.м.мирующее устройство ко входу электрогидравлического усилителя 1 . Недостатком известного привода яв.1яется низкая устойчивость работы при перемещении гидродвигателя из центрального положепия в крайнее вследствие уменьщения сжимаемо1о объема в соответствующей полости гидродвигателя и повыщения коэффициента передачи по скорости изменения давления при малости расхода нагрузки и утечек. Пель изобретения - повышение устойчивости работы. Указанная цель достигается тем, что корректирующее устройство снабжено блоком деления, вы.ход которого подключен через суммирующее устройство ко входу электрогидравлического усилителя, и блоком обратной квадратичной зависимости, связанным входом с цепью отрицательной обратной связи по положению, а выходом с входом делителя блока деления. На чертеже изображена схема электрогидравлического следящего привода. Электрогидравлический следящий привод содержит задающий блок, например, вычислительное устройство 1, связанный с ним э;1ектрогидравлический х-илитель 2 с позиционным золотником (не показан), гидродвигатель 3, соединенный гидролиниями 4 и 5 с зо,1от1тко 1, электрическую цепь отрицательной обратной связи по положению
гидроЛ1Я1г,1ге.1я 3 в идо датчика ( положения, соедпнснного чсре: фильтр 7, ироиусKaKKUHJi частоту ниже 0,05 Гц, с 15ычие.тите,1Ыым vcT)ofiCTROM I, члект)ичегкук) ueiii отрица ЧЛ1 ной опратчюй евязи ю )е11аду давлеши) в шдролиииях 4 и 5 R ви.че датчиков 8 и Я дгл ления, иодк;|юче 1яых ()ую1цео уст)ойсгво 10 к суммирующему ует()(И1ств ;1, выход которо1Ч) иодк.тючеи через к())ректиру1О1цис уст)ойства, вьиюлпениые в виле )иорцио11а, ус1(,игге,1я 12 и HirreipaTOpa 1.5, и суммирук)цее- уетройетЕК) 14 ко вхолу :,чектр гидравлическо -о уси, ителя 2. При SITOM привод содержи i трическук) ueiib иол()жите.1ыи)й обрятнон связи ио )сти в виле 1ах()геие);)тч))а 15 и кинематического преобразователя 16 лвижения, iioi лeдoвaтe;lЫl(J нодк-тюченных через суммируюине хчтройство 14 ко входу Ь1,тектрогид)ав, ичееко1Ч) усили1ч ля 2. Шток 17 |илр()лвигателя 3 связан с наг)узкой 18. При -/гом цепь отрицатч лы-;«й обратной евязи по МО,юженило с)елине 1а через блок 19 об)агп{)й квалр-атичиой за1 исимоет1 с вхолом ле.лиге.тя б,1ока 20 лс,1епия, к)то))1Й ус танов.пен на 1я,1Х()ле 11)()1(рциональ К)1о си,1ителя 12, а 15ыходом иодк,лк)чсн через су.мMiipyioniec устройство 14 ко входу ,екгро 1Т1Д)ав,т1;Чч--еко о уеилитс,лн 2.
Э,лектр:)гилрав;1ичеекий елеля1л;п| работает с,телук)|цим образом,
Залак)Н1ий си па;| от вычис.лите,ч1 но|--;) устройства I поступает lia вхол улект)()г)1лрав лического уси.игтеля 2, золотник 1оелелне1о емеиинлчя, а н()зникак)П1ИЙ в ;ИЛ)С, 4 и 5 перепал лавлений соответетвует усилию на HiTOKe 17. П)и элом си|-нал латчика (, н)охоля1ций через 1{)ильл) 7, но.яшнонируе HITOK 17 в среднее ноложение, относите, которого в пределах неремещенпя штока 17 военроизводятся динамические ко,лсбанпя па рузки 18 мн(Л()сте 1ен1п,1х стендов-и митатороЕ) движения тране11)ртр|ы ередств. При дв)1жении наг)узки 18 ошибка, завиеяшая от скорости, комгклгеируетея соог1 ететч ук)И1,им Bi)i6o)OM коэффициента не)едачи н це ИИ ноложител1 ной обратной евязи от- т-ахогенератора 15 н поступает на вхол уеи.тите ля 2, вызывая пропорциональное с,мен1ение зо.тотника и, тем самым, нол;1ерж1 вая соответствующий расход I гилролиниях 4 и 5, обеспеч шаю|ций лвижоше iiai-рузки. При нахождении наг}ПЗки 18 в крайиих положениях с чцест1илш() увеличивается сигпа,1 в цепи 1)бра1ной евязи но п(),т(;жению и умен1,1пае|-ся ежимаем1)1Й обл.ем масла в еоотБ(Летвуюи1,ей П1Д|)о;1ииип и n(),ioeiT-i гидродви1ате,тя .3.
Г.с.ти при 11аг)узка 18 оетановлена (и,1и лвпжсгся с ма,1ой ск())()етьк)), а внут1)енние 1ечки i ид.)() с)1, геля 2 и теретечки гилроД1)Н1ате,;я 3 ма,1ы, ло выходной нере;|ад дав.лений в области частоты среза 1050 Гц яв,л :ется )а,1о.1 от перемещения .(олотника, коч(|)(})И 1иент иередачи KOTOpoio 1«)3 pa стает нро1И)рционал1Л1о уменьшению об1;ема. П|юнсхоляни1п и)н этом частотных ха)ак еристик разомкнут()й передаточной (})упкцин конт-у)а регу,1ирования дав,ления ведет к поте|)е ус1Ч)йчив()сти и вибра циям и приводе.
Однако б,ток 20 де,пения уменьшает ко(ирициент передачи i-i контуре 1Нчлми)(шапия давлеиии iip()no|iiuiona, уменьшению ежи мас-м()1Ч) обьема ио обратному квалратичному закону c.i пер1ме1цепия, что обеспечиваегчя возроспшм сиг}|ал()м б,1(жа 19, тем самым поддержива(тся с1аби.И)Ность динамических ,чр.;лч гери-с I ик привода и, с,лсдоватчмьно, е1Ч) хчтюйчиiiocTb
1 оско,1ьк ма гематичсчки, О1 ерации, выпо.шяемые б,1оками HI и 20, Я1,яются об)атимымп, о.чи м,) б|..1ть ().1.чо1 ременн() заменены на об а-|ныс (де,1еиие на множепие).
1ри енечне изс)б нлчч1ия is rc-.vax С14пдов-)мита ro|)oii движения ;paricHO.i гных
Ср(ЛСТВ )Л)1Т ПОВ1)1СИТЬ их vT(Hi4HiiOCTb и, ГСМ СПМЫМ. --:)((4Ji{4 TIIBil(lCi Ь их ),Т1 ЗОВапия.
.-Хлек Г1)огилра в,т и: ч ее к и if ел ел я щи и и)и вод ;(. авт. cie ,У 853204, or iiiaHjuiiiucfi тем, что, с це,Л1,1о иовьлпения уетойчивости )або1Ы, Кчрректи; p-yioniee ст)ойств() енабжено б.юком де,тения, 1И)1ХОД которого подключен че|Кз суммирующее ус|-:)ойетво к вхолу элек ро111лрав;1ического уси,лите,ля, и блоком об)атч1ой к1 алра1Т1чной зависимости, связанным входом с отрицате.т1)(ой обратной свя:Л ио по,т(.)женик), а выходом с вхо.том де,1ите,чя блока ле,1епия.
Источники информации, принятые во внимание н)и уксиертизе I. ,Двторское свилетельство ((.(Р ДЬ 853204, к,1. Г 15 1 9:0,3, 1979.
S2
