1
Изобретение относится к области гидроавтоматики и предназначено для использования в системах стендовимитаторов движения транспортных средств для приложения к нагрузке силы, пропорциональной напряжению входного сигнала.
Известен элект эегидравлический следящий привод, содержащий задающий блок, связанный с ним электрогидравлический уси.питель с позиционным золотником, исполнительный гидродвигатель, соединенный гидролиниями с зо..лотником, и электрические цепи отрицательной обратной связи по перепаду давления в гидролиниях и по положению гидродвигателя, подключенные через суммирующие и корректирующие устройства к входу электрогидравлического усилителя 1.
Недостатком известного привода является низкая точность воспроизведения усилия, связанная с возникновением расхода гидрод игателя при движении нагрузки.
Целью изобретения является повышение точности воспроизведения усилия .
Это достигается тем, что привод снабжен электрической цепью положи-тельной обратной связи по скорости гидродвигателя, выполненной в виде последовательно соединенных кинематического преобразователя движения и тахогенератора, подк.гаоченного через суммирующее устройство к входу эле.ктрогидравлического усилителя.
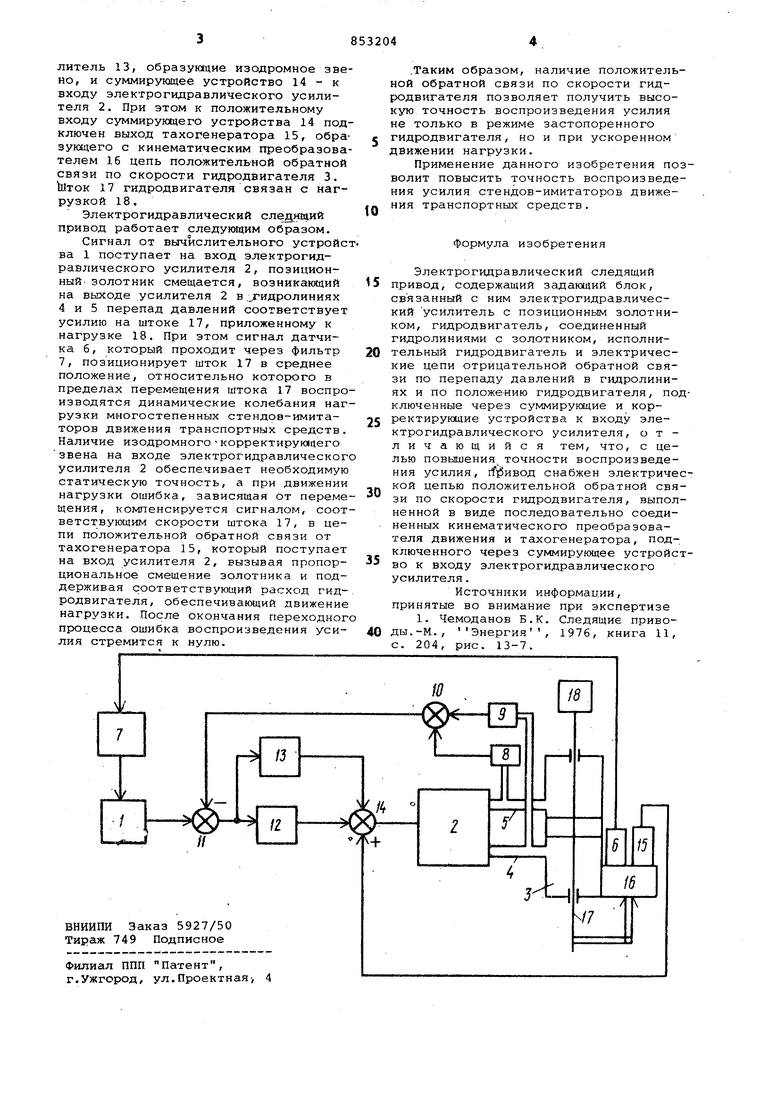
На чертеже изображен электрогидравлический следящий привод.
10
Привод содержит задающее устройство, например вычислительное устройство 1, связанный с ним электрогидравлический усилитель 2 с позиционным золотником (на чертеже не изображен), исполнительный гидродвигатель 3, сое15диненный гидролиниями 4 и 5 с золотником усилителя 2, электрические.цепи отрицательной обратной связи,одна из которых (по положению гидродвигателя 3) содержит датчик положения
20 6, соединенный через фильт р 7, пропускакяций только ..частоту 0,05 Гц, с вычислительным устройством 1, а вторая (по перепаду давления в гидроли25ниях 4 и 5) содержит датчики давления 8 и 9, подключенные через суммирующие устройства 10 и 11 к выходу вычислительного устройства 1 и далее через корректирующие устройства, интегратор 12 и пропорциональный усиJO
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлический следящий привод | 1981 |
|
SU1000614A2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1987 |
|
SU1512244A3 |
| Электрогидравлический следящий привод | 1981 |
|
SU1000612A2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| Электрогидравлический следящий привод | 1980 |
|
SU1048893A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2006 |
|
RU2311567C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД ДРОССЕЛЬНОГО РЕГУЛИРОВАНИЯ С ДВУХКАСКАДНЫМ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ УСИЛИТЕЛЕМ МОЩНОСТИ | 2007 |
|
RU2361123C2 |
| Следящий гидропривод дроссельного регулирования | 1974 |
|
SU585320A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С ТРЕХКАСКАДНЫМ ЭЛЕКТРОГИДРОУСИЛИТЕЛЕМ | 2012 |
|
RU2505715C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД ДРОССЕЛЬНОГО РЕГУЛИРОВАНИЯ С ОДНОКАСКАДНЫМ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ УСИЛИТЕЛЕМ МОЩНОСТИ | 2007 |
|
RU2361122C2 |
