к зсмлероино- именно к бульИ:«)брстение относится транспортным машинам, а дозерам.
Целью изобретения является онределе- иие начального за1 лубления отвала.
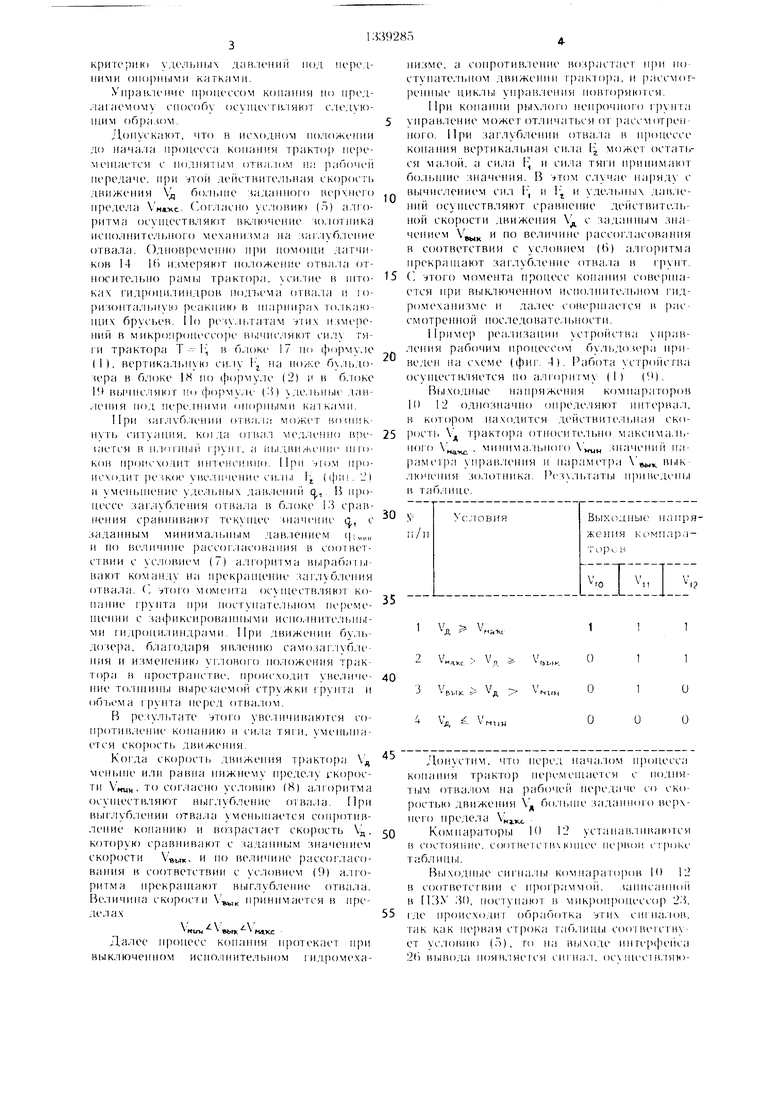
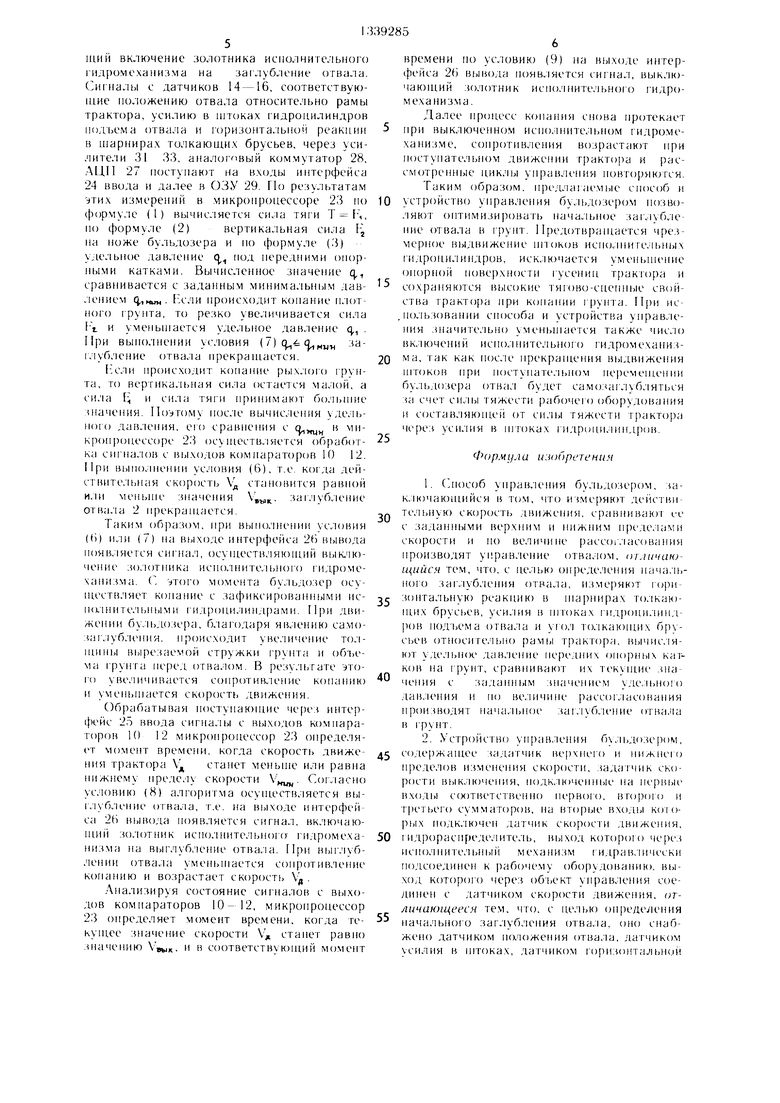
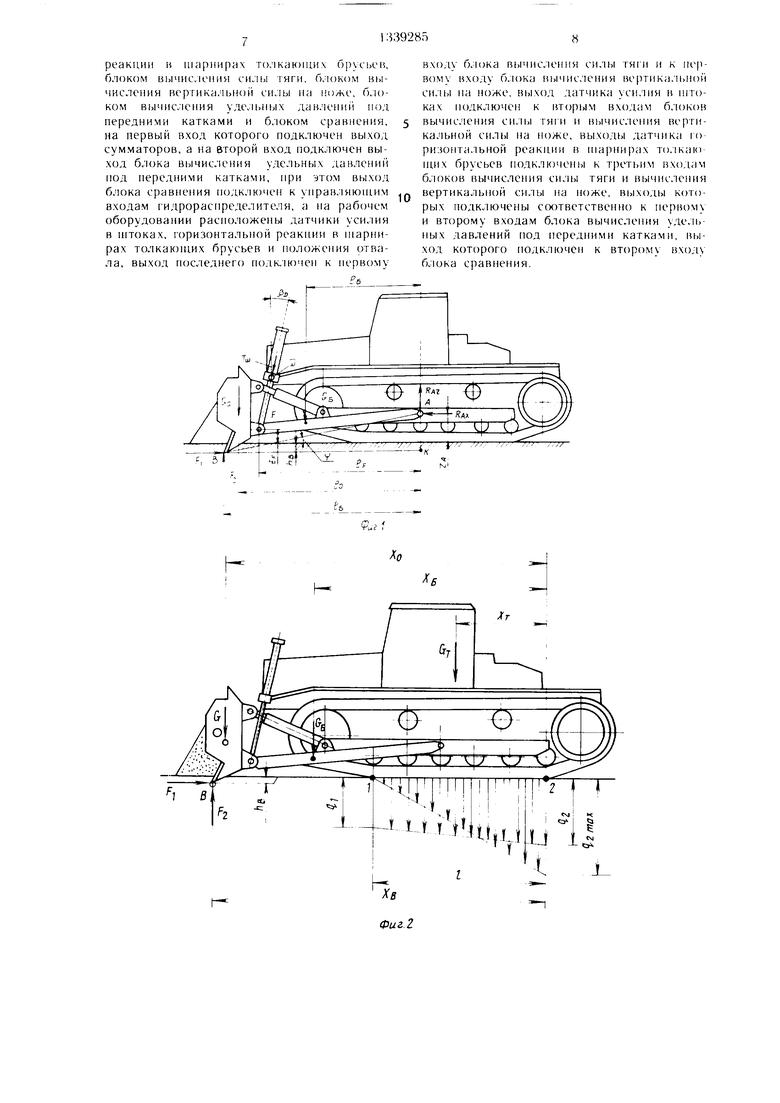
На фиг. 1 приведена расчетная с.хема сил, действующих на рабочее оборудование; tia фиг. 2 схема сил, действуюши.х на бульдозер, и энюра удельных давлений в контакте гусениц с грунтом; на фиг. 3 функциональная блок-схема устройства для реализации снособа управления бульдозером; на фиг. 4 схема устройства унрав- .тения рабочим процессом бульдозера.
На фиг. 1 показаны следующие величины, поясняющие способ; F, - горизонтальная сила сопротивления на ноже, равная по модулю силе тяги Т трактора; F, вертикальная сила сопротивления на ноже; TU, усилие в HiTOKax гидроцилиндров отвала; G, -- сила тяжести отвала; Gg сила тяжести толкающих брусьев; R, горизонтальная реакция в Ц арнирах толкающих брусьев; h, - вертикальная координата положения режущей кромки отвала относительно онориой поверхности гусениц; /-г, 7. - вертикальные координаты точек F и Л; EJ., If. Е,, 1в - линейные размеры; Рд угол оси штока с вертикалью.
На фиг. 2 дополнительно 11ока;1аны G - сила тяжести трактора, ф, и удельные давления под передними и задними онор- нымн катками; Х„, X, Х-, Е ;1инейн1)1е размеры.
Функциональная блок-схема (фиг. 3) и устройство (фиг. 4) содержат об ьект управления (трактор) 1, рабочее оборудование (отвал) 2, исполнительные г идроцилиидры
3,шарнирио С(х диненные с отвалом 2 и трактором 1, электрогидрораспределитель
4,датчик 5 скорости движения (например, донлеровского типа), автоматический регулятор 6, состоящий из задатчиков 7 --9 и компараторов ( элементов сравнения ) 10 12, блок 13 сравнения, датчик 14 положения отвала, датчик 15 усилия в штоках, датчик 16 Iоризонтальной реакции в шарнирах толкающих брусьев, блок 17 вычисления силы тяги, блок 18 вычис.чения вертикальной силы на ноже и блок 19 вычисления удельных давлений.
Кроме того, на фиг. 4 ноказаны гидромагистрали 20 и 21, соединяющие электро- гидрораспределитель 4 с гидроцилиндрами .3, насос 22, микропроцессор 23, интерфейсы 24 и 25 ввода и интерфейс 26 вывода, аналого-цифровой нреобразователь (АЦП) 27, аналоговый коммутатор 28, оперативное запоминаюшее устройство (ОЗУ) 29, постоянное запоминаюшее устройство (ПЗУ) 30, усилители 31 -33.
Расчетная схема (фиг. 1) позволяет с помощью микропроцессора по ре: ультатам измерения датчиками информациопных иа
раметров вычислить горизонтальную силу F, на ноже бульдозера, которая но модулю равна силе тяги Т трактора
F, T R ±Т„ (1)
:1иак плюс второго с,:1аг аемого формулы (Г) соответствует сжимающему усилию Т в штоках.
Угол ft (фиг. 1) однозначно зависит от у I л а у.
Вертикальную силу F на отвале вычисляют но формуле, патученной из уравнения суммы моментов сил относительно точки К (фиг. 1),
15
lG,,fn+GbPb RAx(hl.+ Zx) +
0
5
0
+Т -cosp +Т .i,sinp.( Z1 + hn) 1(2)
Положительное значение силы Г соответствует направлению силы вверх со стороны г рунта на отвал.
При заглублении отвала в грунт на гго- же появляются силы F, и Р, которые искажают исходную эггюру уде;гьных давле- ггий под оггорньгми катками трактора. Вертикальная сила Fi уменьгпает давление с,, 1ГОД ггередними катками и увеличивает дав- . гение q, под задггими катками ходовой части трактора.
Уменьшение удельных давлений q,, в ггредельном случае возможно до Ц|,, при этом удельное давление q. возрастает до q.iMiKc а эпюра удельных давлениг принимает форму треуг ольпика.
Удельные давления ггод ггередними oiio)- ггыми катками вычисляются гго формуле
5
Я.
г-де В Цри
G,X. 4- GeXE t -l-Fih.- FvX fl
г усениньг.
3)
ширипа условии
Ч , q.MiJxt
(41
0
5
0
5
ггрггобретают n редел ьудел ьгг ые давлен и я ггое зггачеггие.
Алгоритм работьг системы управления гго с ко рос т гг движения имеет вид
еслгг :1 V.iK,0, то .I;(5|
еслиV.1 iii. О, то (6)
еслиqi 4iv«i, О, то х (7)
еслиV-i-Умии О, го х XBI,I;(JS|
ec. uiV.I V.jh О, то x -XBNf.,(9)
где X - параметр управлеиия золотником электрогидрорасиределителя; -х,„. - .- иараметрьг включения и выключения золотника пргг выглублении отвала, и, соответственно, Г1оложительгц ге значения , при заглублении отва.ча.
Функциональная блок-схема системы уггравлеггия содержит г лавный контур угграв- ления по скорости движеггия трактора и дополнительный контур управления, с ггомо- шью которого осугцествляют оптимггзагпгю ггачальггого загмубления отвала в грунт по
критерию уделы11,1 дгпмеиии ними опорными катклми.
Унраи.1(. процессом копания ип прсд- , iaracMOMy способу осушссп яют с.ледук)- 1НИМ оГ))а.«)1.
Донускают, что н исходном но.чожсиии до нача.та нронссса копания тракто) iie)e- мешас гся с поднятым отиа.юм ни рабочей передаче, при той де11стниге. 1ьпая скоросП) дни/Кения д бо. 1ьп1е ; аданпого nepxtiero п)едела ма.хс. (л)1 ласпо условию (о) алго- )итма ocyHiecTBjiHK)T ик. 1ючепие чо.ютнпка исполнительного мехапи: ма на заг.тублепие отва.та. Одиогммлимпю i иомопш дагчп- кон 14 1Г) и;шеряют положение oTna.ia от- носител1,н() 1амы трактора, уси. ше н IHTO- ках гид)()в иодт.ема ovBa.ia и го- шзопта.чьную реакнию к И1арнирах то.чкаю- 1ИИХ брусьев. По .1ьтатам (тих и,(мере- ний R мпкро:1рои1Ччч)ре нычис.чяют сил тяги TjKiKTOpa Т- li, в блоке 17 по («орму.ю |1), вертикальную силу Ь на ноже бчльдо- Н ра в б. юке 18 но (|)о)му.;1е (2) и в б.иже 19 вычисляют Но (.:|с (3) де.11111Ь1с .тан- ления под нере.шими oiiopni.iMii каткамн.
При чаг.:1 б;к нии отва.ча может вочник- путь ситуация. KOI да (Л вал медленно вре- ается в п, . а выдвпжсние niro- ков 11)оисходпт инт(Ч1сивно. При 4()м происходит )е ,кос уве.тичение си.:|1.: 1 ((. 2) и уменьнк ние удельных давлени q,i И процессе заг.чубления отва.ча в б.юке 13 сравнения сравпиван)г текуп1ее чпачение cj,, с заданным минимальиым давлением {||,,,„ и но 1и 1ичипе рассоглас1)вания в соогвет- с 1вии с слови1 м (7) а. П оритма вырабагы- вают коман.чу па 11рек()а1цение заглублеппя отвала. С, момента осуществляю ко- папие групта при noci упательном nepi-Me- Н1ении с ча4)икси)()а}|ными испо.штельнь - ми гидроцилипдрами. При днижеппи бу.ль- дочера. благодаря яв.пепию самочаг.-|убле- пия и ичмеиеник уг. ювого по.тожения трактора в пространстве, происходит уве.тиче- пие ТОЛ1ИИПЫ выречаемой стружкп грунта ц об ьем а грунта перед ()тва.том.
В ре.чультате этого уве.шчиваются со- npoTnii. ieinie копанию и си. 1а ТЯ1И, умеп1)1па- ется скорость движения.
Когда скорость .движения т)акт()а д меньп1е или равна нижиему нреде.ту гкорос- ти V KUH , Т согласно условию (8) а.тгорит.ма осуществляют вьц .тубление отвала. При вьнмуб.тении отвала уменьи1ается соп1)отив- лепие конапию и возрастает скорость д, которую сравнивают с ча.чаниым значением екорости Чык. и по величине paccoiviaco- ва)1ия в соответствии с условием (9) а.тго- ритм а 11рекраи1ак)т выглубление отва;1а. Е мичина скорости ,к иринимается в iif)e- делах
VHUM sbtx MAXJ:
Далее п)оцесс коцаппя протекает нри вы ключеииом исиолпительном гидромеха
0
5
0
5
низме, а сонротив.пеиие возрастает при по ступате.чьном движе1П1и т)акг()ра, и рассмог- реппые циклы уп1 )ав, 1епия повгоряются.
При копапии |1ыхл()1Ч) iienpoHHoi o грунта управление можег отличаться от рассмотреп ного. При за1 лублении отва.та в нрощч се копапия вертикальная си.та - может остаться малой, а сила 1 и сила тяги ирипимают бо;1ыпие значения. В том с.чучае наряду с вычислением си.т -, и 1- и уде.чьных дав.че- пий осуигествляют сравнение де11ствите.1ь- пой скорости движения с задаииым зпа- чепием V, и по величипе рассог.часования в соответствии с условием (6) ал1 ор1ггма прекращают заг луб.ченпе отва.та в групт. ( утого момента процесс коцания совершается нрн выключенном исполните.чьном 1 ид- ромехапизме и да.тее совершается в рассмотренной последовательности.
Пример реа.тизапии ycrpoiicTna ления рабочим ироцессом ()зера и|1и- веден на схеме (фиг. 4). Работа усгройства осуп1.еств,чяется но алгоритму (I) (9).
Вы ходпыс иа нря жепия ком нараторов 10 12 одпозпачпо оп)еде. 1яют ннтерва., в котором находится де11ствите. И,ная еко- рость д трактора от1И)сите. 1ып максима.м,- fioro V ,., . ми1П1ма.П)Пого значспш на- рамсгра .теппя н парамет 1а вы .чючеппя чо. ютппка. Рез. 1ьтаты привс дс пь в таблпце.
30 NO
1 V,
/lonycTHM, что ие1)ед нача.чом ii|)onecca копания трактор перс мешается с поднятым отвалом па pa6o4eii |ере.1аче со скоростью движения д больни- заданною верхнего предела
Комнаратор1 1 И) 12 устанав.чиваются в состояние, соотвеч с гв lOHiee нервои строК. таблицы.
Выходные сигналы компараторов 1(1 12 в со()тветс вип с программою. .ianncaiinoii в ПЗУ 30, поступают в )11роцс Ссор 23. где происхо.чп г обработка :(тих сигиа.юв. так как первая строка таблиш соогвегству- ет ус.товию (5), то на В1, интер(|)ейса 2() вывода появ.чяется спгна.к ос iiU4 i в.чяютип включение золотника исполнительного 1Ч1дромеханизма на заг лубление отвала. Сигналы с датчиков 14-16, соответствую- Н1ие по. южению отвала относительно рамы трактора, усилию в штоках 1 идроцилиндров подъема отвала и горизонтальной реакции в шарнирах толкающих брусьев, через усилители 31 33, аналоговый коммутатор 28, АЦП 27 поступают на входы интерфейса 24 ввода и далее в ОЗУ 29. По ре:1ультатам этих измерений в микропроцессоре 23 но формуле (1) вычисляется сила тяги T F%, но форму.пе (2)вертикальная сила I-j
на ноже бульдозера и по (юрмуле (3) удельное дав;1еиие q,,, иод передни.ми опорными катками. Вычисленное значение q,., сравнивается с заданным минима. 1ЬН1)1м дав- .лением CJ,.,MUH. Рл ли происходит копание плотного рунта, то резко увеличивается сила t и уменьшается удельное давление с|,, . При выиолнении у ;ловия (7) Ц ц-н-н - й- |лубление отвала ирекран1ается.
1:сли происходит копание рых. юго груп- та, то вертика.1ьпая сила остаелся малой, а спла f; и спла тяги принимают большие :и1ачения. Поэтому после вычислепия удель- н()() давлеиия, ею сравнения с с,„ в микропроцессоре 23 осу Н1еств.1яется обработка си| на,лов с вьгходон компараторов 10 12. При вьшолиенпи условия (6), т.е. когда дей- ствите, Ц)Пая скорость д стаиовится равиой или мепьнн- зпачения заглубление отва,ла 2 прекращается.
Таким образом, при выполнении условия (Н) или (7) на выходе интерфейса 2Г) в|)1вода появляется , ()суп1еств,чяк)1ци11 BI,IK.IIK)- чение зо,тотпика исполнител1,но1-о 1 идроме- хаиизма. С этого мо.мепта бу.льдозер осуществляет конаиие с зафиксированными ис- П(хл11ител1)11ымп |-идр()цили1{Д)ами. При движении бу. П)Дозера, б.лаг одаря ив.лению са.мо- заг,|убления. происходит увеличение то.л- шипы вырезаемой стружки грунта и () ма грунта перед отвалом. В резу,л1.,гате это- | о увеличивается сопротивление копанию и уменьшается скорость движения.
Обрабатывая ноступаюшие че()ез интер- 4)ейс 25 ввода сигна.лы с выходов компараторов И) 12 микропроцессор 23 определяет MOMeirr времени, когда скорост1 движе- иия трактора станет меньше или равна нижнему 11реде, 1у скорости V,. Согласно ус,л()вию (8) алгоритма осуществляется вы- 1,лублеиие отвала, т.е. на В1)1ходе интерфейса 2Н вывода появляется сигнал, включаю- nuiii зо,Т()тпик ис11О. 1Ните,льног(г гидромеханизма па вьп лубление отва,ла. При выглуб- , 1епии OTBa;ia уменьшается сопротивление копанию и возрастает скорость V), .
Анализируя состояние сигналов с вьгхо- дов компараторов 10-12, микропроцессор 23 определяет момент времени, когда текущее значение скорости д станет равно значению вык, и в соответствующий момент
времени но условию (9) на интер- (})ейса 2() В1,п(ода ноявляется сигиа;, выключающий золотник ис11олните,чьногч) гидромеханизма.
Далее процесс копания снова протекает при выключенном иснолнительиом гидромеханизме, соиротивления возрастают при поступательном движении трактора и рас- смотренн1)1е UHKJIIJI управления повторяюгся. Таким образом, предла1аемые способ и
устройство управлеиия бул1,д{)зером позволяют оптимизировать иача.льиое за1 луб,ле- иие отвала в грунт. Предотвращается чрез- мерпое выдвижение штоков исполни ге,л1)НЬ1х |-идроиилиндров, исключается уменьшение опорной поверхности гусениц т)актора и
сохраняются высокие тягово-снепные свойства тракто)а при копании грунта. При ис- . по.льзовании способа и устройства унравле- ния значительно уменьшается также число включений ис пол и и тельного гидромеханизма, так как после прекращения выдвижения иггоков при поступательном перемепнчпш бульдозера отвал будег самозаг.лубляться :(а счет силы тяжести рабочего оборудования и составляк)Н1е11 от си.чы тяжести грактора через уснлия в Н1токах гидроцилиндров.
Формул и изобретения
1.Слюсоб унравления бу.льдозером, за- к,1ючаюшийся в том, что и)меряют де11стви те,льиую скор(к ть движения, сравниваюг се с задан1Н)1ми верхним и пижним преде,лами скорости и по величине )accoi .тасования производят управление отва.лом, тличию- щийся тем, что, с це, :ьк) определения начального заглуб.леиия отвала, измеряют lopnг зоитальную реакцию в Н1арнирах то,лкак)- 1ЦИХ брус1 ев, уси,лия в Н1гоках гпд|к)ци,липд- |)ов нод ьема отвала и угол Т(),лкак)ни1х брусьев относите,лы1О рамы трактора. вычис,ля- ют уде,Ч1)Иое давление передних опорных катков на грунт, сравнивают их текун1ие зна чения с задан111.1м значеннем уде.ц.ного .тавления и по ве,личи11е рассогласования прои; водят иача,льное заг,луб;1епне отва.ла в грунт.
2.Устройство ун)ав.ления бу,льдозером, 5 С()де()жан1ее ; адатчик верхнего и нижнего
пределов нзменения ск()1)ости, .адагчик скорости вык,люче11ия, иодк,1К1ченные на первые входы ссютветсл венио первого, вгорого п третьего сумматоров, иа вггорые входы коло- рых иодк,лк)чеи датчик скорости движения, 0 гидрораспределите.ль, ввяход которого черс з исв1о, вв1ителв пв п 1 меха1визм i и драв,: и чески подсоедиввен к рабочему ()борудов(а1Н1ю, вв,1- ход которого через обЛ)ект унрав.ления соединен с датчнком скорости движения, DT- линающееся тем, чго, с целью О11ре/;елев1ия ввачалыимч:) заг.лублеввия отва,ла, оно снаб- жевк) датчнком ноложеввия отвала, датчиком усилввя в BiBTOKax, датчиком ворв13о11талВ)Н(.1Й
5
реакции в шарнирах то.чкающих брусьен, блоком вычислеиия си:1ы гяги. б.юком вы- числсиия вертикальной си,1ы иа ноже, 6.10- ком вычисления удельных давлеии под передними катками и блоком сравнения, на первый вход которого подключен выход сумматоров, а на второй вход подключен выход блока вычис. 1ения удельных давлений под передними катками, при этом выход блока сравнения подключен к уиравляюн1пм входам гидрораспределителя, а на рабочем оборудовании расположены датчики усилия в iUTOKax, горизонтальной реакпии в niapnn- рах толкакмцих брусьев и положения отвала, выход последнего подк,тючен к нервому
Pf.
чА
входу блока вычисления силы тя1 и и к первому входу блока вычис. 1е}1ия вертика.чьпой си. 1ы на ноже, выход датчика уси, 1ия в пп о- ках подключен к вторым входам блоков вычисления сил1)1 тя1п и вычис. кшия вертикальной силы на ноже, выходы датчика lo- ри;юнтальной реакпии v, шарнирах To.iKaio- nuix брусьев подключен. к третьнм входам блоков вычисления силы тяги и вычисления вертикальной силы на иоже, выходы которых подключены соответственно к нервому и второму входам блока вычисления удельных давлений под передними катками, выход которого подключеи к второму входу блока сравнения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Бульдозер | 1987 |
|
SU1491973A2 |
| Способ управления рабочим процессом бульдозера | 1985 |
|
SU1328449A1 |
| Способ управления процессом копания | 1985 |
|
SU1307041A1 |
| Способ управления рабочим процессом бульдозера | 1985 |
|
SU1239233A1 |
| Землеройная машина | 1979 |
|
SU881216A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ БУЛЬДОЗЕРА | 1990 |
|
RU2018576C1 |
| Установка для испытаний промышленного трактора | 1990 |
|
SU1742665A1 |
| Бульдозер | 1980 |
|
SU941488A1 |
| Устройство для управления рабочим органом бульдозера | 1980 |
|
SU941503A1 |
| Бульдозер | 1983 |
|
SU1199872A1 |
И;«)бр(. теиие относится к :u M.4e)oiiiio- граисп()рти1,1м .машинам и позволяет оире- ле;1ять начальное заглубление отва.ла буль- ,lo:iepa. /1лн stToi o в нроиесес копаиия даг- чиками 5, 14, 15 и И) и.чмеряют еоогветп вен- но .ичк твии-льнук) скорость гГд движеиия. угол Y толкак)ни1. орусьев (п носитиилю рамы тракгора, уси.чия в Н1г)ка. i идро- ци:1И11др()в нод 1,ема oTBa. ia и 1 оризонта.1ь- иун) реакцию R, в 1нар11И(1а. го,1как)Н1и брус1 ев. Затем в б. ижах 17 и 18 соответственно но .значениям Ч, Ти и R, , 1я- К)Т си.|у ТЯ1 и F , и вертикальную сн, 1 1 на ноже, но которы.м вычнс.чяют в б/кже 19 удсмьное .давление q., передних онорны.х каг- ков на 1|)унг. В б.юке 13 с 1аинения сравни вают текущие зиачеиия Ц, с заданным и н( ве.шчине j accoi.тасования нроизводят на- ча.чыюе .за1. |уб. 1ение отва,1а в . N iipaB, ie. ние отвалом ироизводят но ве.личине рассогласования, ()нреде. в автоматическом |)е1уляторе 6. В нем текицее значение д сравнивается с ее задаи}1ыми верхним VMC-TC и нижним VKUH нределами скорости и с величине) Vewic выключения золотиика. Величина Уьык и И1нимается в нределах VMvju VebiK VMaHc. 2 С.Н. ф-ЛЫ, 4 НЛ. о (Л оз со со 00 СП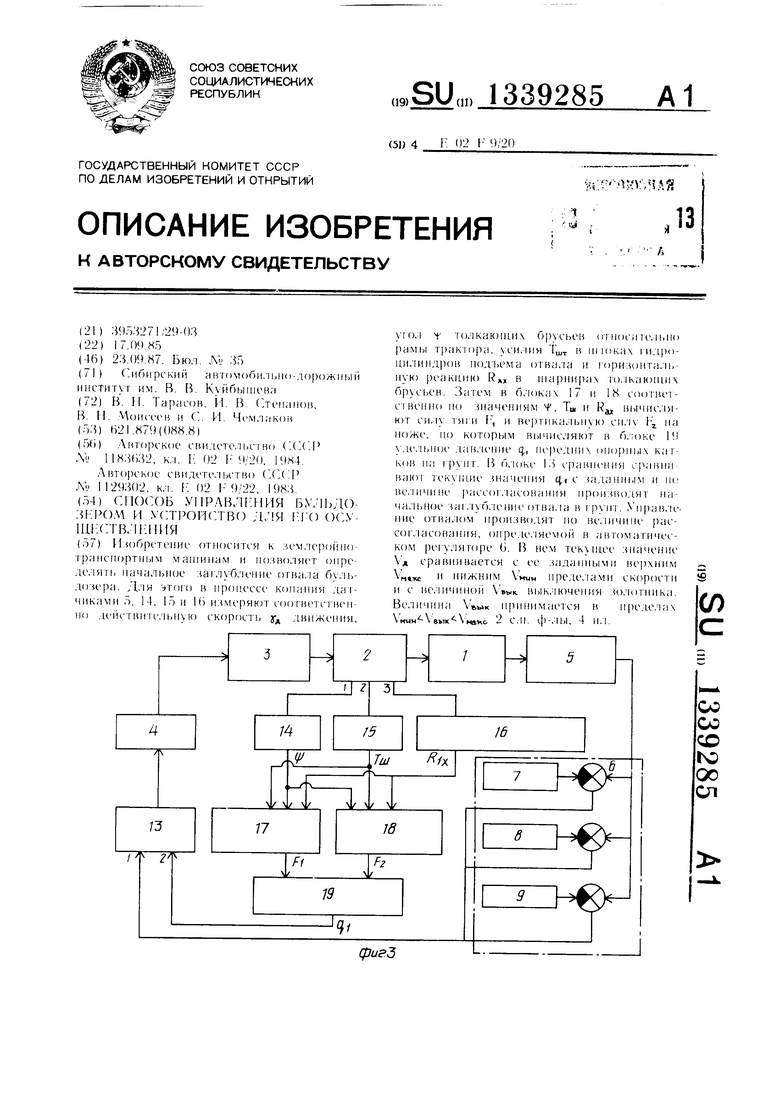
ФигМ
