(54) УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ МЕХАНИЧЕСКОЙ ПЕРЕДАЧИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования механической передачи | 1982 |
|
SU1091192A2 |
| Устройство для моделирования механической передачи | 1985 |
|
SU1254515A1 |
| Устройство для моделирования механической передачи | 1984 |
|
SU1196912A2 |
| Устройство для моделирования механической передачи | 1981 |
|
SU982032A2 |
| Устройство для моделирования механической передачи | 1983 |
|
SU1180932A1 |
| Устройство для моделирования механической передачи | 1982 |
|
SU1068953A1 |
| Устройство для моделирования механической передачи | 1980 |
|
SU960862A2 |
| Устройство для моделирования динамики движения гусеничной машины | 1980 |
|
SU940186A2 |
| Устройство для моделирования механической передачи | 1979 |
|
SU864306A1 |
| Кинотренажер водителя гусеничной машины | 1987 |
|
SU1531707A1 |
1
Изобретение относится к аналого-вычислительной технике и может быть использовано в тренажерах транспортных средств и исследовательских стендах.
Известно устройство для моделирования механической передачи, содержащее последовательно соединенные первый интегратор, усилитель и второй интегратор, выход которого подключен к входу первого интегратора С1 1
Также известно устройство, содержащее последовательно соединенные первый интегратор, усилитель и второй интегратор, который через мостовой вьтрямитеяь подключен к источнику разнополярного напряжения С 2 .
Наиболее близким к предлагаемому по технической сущности является устройс1 во для моделирования механической передачи, содержащее инвертор и последовательно соединенные первый интегратор, первый коммутатор, второй интегратор, усилитель, ограничитель, второй коммутатор, третий интегратор, вход и выход
которого соединены с одной парой вершин мостового выпрямителя, другая пара вершин которого через ограничительные резисторы подключена к ис1ючнику разнополярного напряжения, выход третьего интегратора соединен с вторым входом второго интегратора, управляющие входы коммутаторов подключены к соот-; ветствующим выходам датчика переключения передач С 3 .
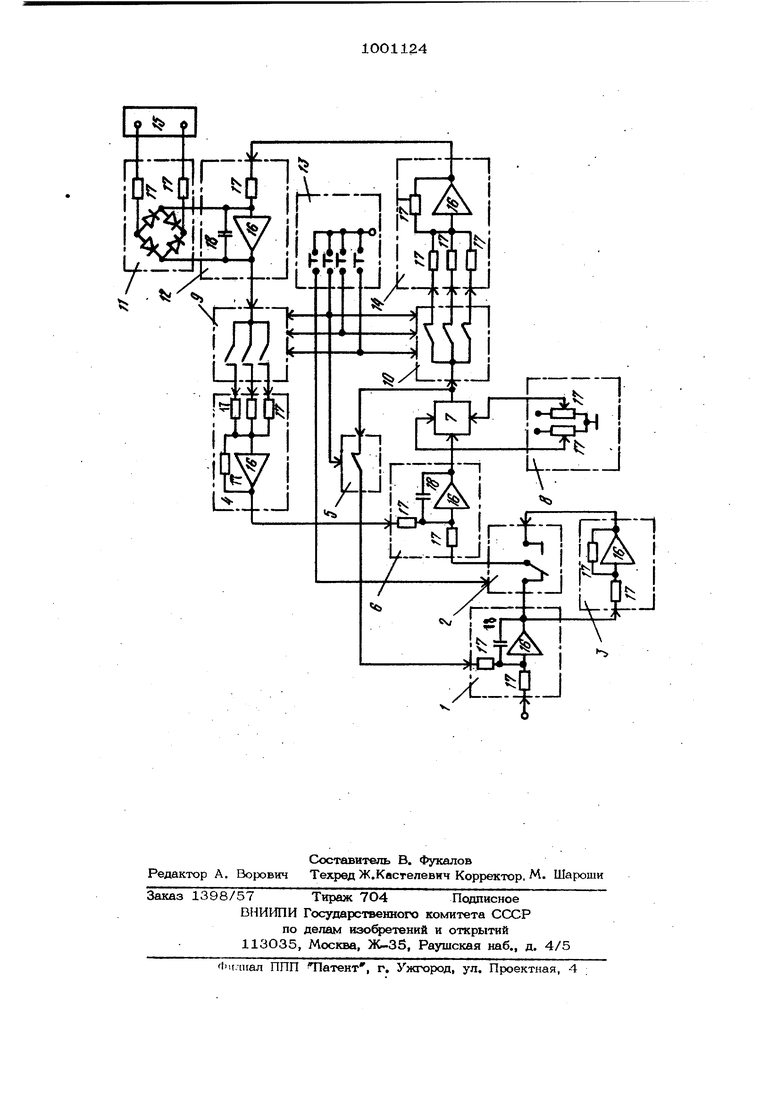
Недостатком этого устройства является, во-первых, то, что да1шое устройство не модулирует работу коробки передач при выключенн9й передаче, вовторых, неточно-воспроизводитея переходный процесс, так как наличие различных резисторов, определяющих различное передаточное число коробки, на входах интеграторов приводит к значительному изменению суммарной податливости и момента инерции коробки передач, хотя в реальных коробках податливость от вхо.шюго вала и момент инерции вращающихся масс и самого транспортного средства, приведен- . ных к выходному валу, изменяются меньше, чем передаточное число коробки пере дач. Цель: изобретения - повьшение точности моделирования. Указанная цель достигается тем, что в устройство для моделирования механической передачи, содержащее три интегра тора, ограничитель напряжения, мостовой выпрямитель, ограничительные резисторы источник разнополярного напряжения, датчик напряжения фрикциона, инвертор, два коммутатора, первый суммирующий усилитель, датчик положения рычага переключения передач, состоящий из группы выключателей, одни входы которых объединены и подключены к щине постоянного потенциала, а друпие выходы соединен с управляющими входами соответствующих КОММУ таторов, первый. вход первого интегратора является входом устройства, а его выход соединен с первым информационным входом первого коммутатора и с входом инвертора, вьпсод которого подключен к второму информационному входу первого коммутатора, выход которого соединен с первым входом второго интегратора, выход которого подключен к информационному входу ограничителя напряжения, управляющие входьх соединена с выходами датчика напряжения фрикциона, выход ограничителя напряжения подключен к информационному входу второгчз коммутатора, выходы кото рого соединены соответственно с входами первого суммирующего усилителя, выход которого соединен с входом третьего интегратора, одна пара верщин мостового вьщрямителя соединена соответственно .с входом и выходом третьего интегратор а другая пара верщин мостового выпрямителя через ограничительные резисторы подключена к источнику разнополярного напряжения, дополнительно введены третий и четвертый коммутаторы и второй cyм иpyюIIЩй усилитель, причем управляющие входы третьего и четвертого коммутаторов соединены с выходами соответствующих переключателей датчика положения рычага переключения передач, информационный вход третьего коммутатора соединен с выходом ограничителя напряжения, а выход подключен к второму входу первого интегратора, информационный вход четвертого коммутатора соединен с выходом третьего интегратора, а выходы подключены соответственно к входам второго суммирующего усилите ля, выход которого подключен к второму входу второго интегратора. На чертеже изображена схема устройства. Устройство содержит первьхй интегратор 1,первый коммутатор 2, инвертор 3, второй суммирующий усилитель 4, третий коммутатор 5, второй интегратор 6, ограничитель 7 напряжения, датчик 8 ограничения напряжения фрикциона, четвертый 9 и второй 10 коммутаторы, мостовой вьшрямитель 11, третий интегратор 12, датчик 13 положения рычага переключения передач, второй суммирующий усилите пь 14, источник 15 разнополярного напряжения, операционные усилители 16, резисторы 17 rf конденсаторы 18. Выход интегратора 1 через последовательно соединенные коммутатор 2, интегратор 6 и ограничитель 7 соединен с входом коммутатора 10, группа выходов которого соединена с группой входов сумматора 14, выход последнего через интегратор 12 соединен с входом коммутатора 9, группа выходов которого соединена с группой входов сумматора 4, выход последенго соединен с вторым входом интегратора 6. Выходы датчика 13 положения рычага переключения передач одновременно соединены с соответствующими управляющими входами коммутаторова 2,5, 9 и 1О. Выход интегратора 1 через инвертор 3 соединен с вторым входом коммутатора 2, а выход датчи|ш 8 соединен с управляющими входами ограничителя 7, выход которого через коммутатор 5 соединен с входом интегратора 1, другой вход которого является входом устройства. Устройство работает следующим обраПри режкме включенной передачи в датчике 13 положения рычага переключения нередач, представляющем собой группу выключателей, включен переключатель соответствующей передачи, например второй. В этом случае сигнал с датчика 13 поступает на коммутаторы 9 и 10, подключая определенный вход суммирующих усилителей 4 и 14 соответственно к вь ходам интегратора 12 и ограничителю 7. Коммутаторы MOITT представлять собой либо реле, либо аналоговые электроннью переключатели. Если в этом случае на свободный вход интегратора 1 подать напряжение U, пропорциональное крутящему моменту, приложенному к входному валу коробки, то на выходе интегратора 1 появится напряжение ( , пропорциональное оборотам выходного вала. Постоянная времени интегратора 1 определяет момент инерщии вращающихся масс, находящихся в постоянном зацеп- пении с входным валом и приведенных к нему.
Напряжение Уи) поступает через коммтатор 2 на вход интегратора 6, на выходе которого формируется напряжение U|j пропорциональное моменту упругих сил, возникающих в результате упругой деформации. Постоянная времени интегратора 6 определяет податливость деформируемы частей коробки передач.
Напряжение UJA без изменения по амплитуде проходит через ограничитель 7 и с помощью коммутатора 10 направляется на вход суммирующего усилителя 14, соответствующий включенной передаче. Коэффциент передачи данного усилителя по каждому входу определяет передаточное число коробки передач по моменту Таким образом, на входе усилителя 14 формируется напряжение, пропорциональное произведению i My , Последнее поступает на вход интегратора 12, на выходе которого формируется напряжение Шп пропорциональное оборотам выходного вала коробки передач. На другой вход ин- тегратора 12 через мостовой ввшрямитель 11 с источника разнопопярного напряжения подается напряжение, пропорциональное моменту сопротивления дис- сипативных сил. Это напряжение за счеж мостового вьшрямителя будет всегда противоположным по знаку напряжению iUjrt« . т.е, оно будет всегда тормозным для интегратора 12.
Напряжение Uyj с помощью коммутатора 9 подается на один из. входов усилителя 4 соответствукяцей передачи. Коэффициент сумматора по каждому входу равен передаточному числу коробкн передач. Талим образом, на выходе усилителя 4 формируется напряжение, пропорциональное произведению , которое поступает на второй вход интегратора 6, При достижении равенства Оц, процесс разгона коробки прекращается и наступает установивщийся режим.
Режим выключенного фршшиона характеризуется тем, что напряжения с датчика фрикциона равны нулю, поэтому уровень ограничения ограничителя 7 также равен нулю, В этом случае при подаче напряжения U|v, на свободный вход -интегратора 1 на его выходе будет напряжени Uu) , на выходе интег эатора 6 также
будет напряжение Однако это на-1 пряжение через ограничитель не пройдет, так как уровень его ограничения равен нулю, и тогда (независимо от включенной передачи) не будет раскручивакдаего момента, приложенного к выходному валу коробки передач, т,е, напряжение С/ц;на выходе интегратора 12 будет равно нулю.
При режиме включенной нейтрали все коммутирующие элементы коммутаторов 5, 9 и 10 разомкнуты, В этом случае (как и в предыдущем) передача момента не осуществляется, а коммутатор 5 служит для того, чтобы при замкнутом фрикционе, т.е. когда на управляющих входах ограничителя 7 присутствует максшиальное напряжение, по цепи обратной связи не поступало напряжение с выхода ограничителя 7, которое было сформировано в результате наличия напряжения Уц) на первом входе интегратора 6, Если бы напряжение Уму поступало на второй вход интегратора 6, то оно создавало бы момент сопротивления вращению входного вала, что 51вляется противоестественным фактом, так как при включенной нейтрали в коробке передач передача мощности отсутствует.
В режиме заднего хода устройство работает так же, как и в режиме вклкхченной передачи переднего хода, с той лшиь разницей, что напряжение помсяцью коммутатора 2 подключается к интегратору 6 через инвертор 3, в результате чего напряжение Уц)- становит ся противоположным по знаку напряжению Uujo яри включенных передачах переднего хода.
Таким , предлагаемое устройство позволяет более точно моделировать работу коробкн передач, что дает возможность использовать его не только в тренажерах, -но и в исследовательских стендах.
Формула изобрет е н и я
Устройство для моделирования механической передачи, содержащее три интегратора, ограниэдтель напряжения, мостх}вой выпрямитель, огракич тыльные резисторы, источник разнополярного напряжения, датчик напр51жения фршшиона, инвертор, два коммутатора, первый суммирукмций усилитель, датчик положения рычага переключения передач, состоящий из группы выключателей, одни входы которых объединены и подключены к шине постоянного
1 потенциала,. а другие выходы соединены с управляющими входами соответствующих коммутаторов, первый вход первого интегратора является входом устройства, а его выход соединен с первым информа- s иконным входом первого коммутатора и с входом инвертора, выход которого подключен к второму информационному входу первого коммутатора, выход которого соединен с первым входом второго интеграто-10 ра, выход которого подключен к информационному входу ограничителя напряжения, управляющие входы которого соединены с выходами датчика напряжения фрикциона, выход ограничителя напряжения подключен 15 к информационному входу второххз коммутатора, выходы которого соединены с входами первого суммирующего усилителя, выход которого соединен соответственно с входом третьего интегратора, одна пара 20 вершин мостового вьшрямителя соединена соответственно с входом и выходом треп его интегратора, а другая пара вершин мостового вьшрямителя через ограничительные резисторы подключена к источ- И нику разнополярного напряжения, отличающееся тем, что, с целью повышения точности моделирования, оно
дополнительно содержит третий и четвертый коммутаторы и второй суммирующий усилитель, причем управляющие входы третьего и четвертого коммутаторов соединены с выходами соответствующих вььключателей датчика положения рычага переключения передач, информационный вход третьего коммутатора соединен с выходом ограничителя напряжения, а выход подключен к второму входу первого интегратора, информационный вход четвертого коммутатора соединен с выходом третьего интегратора, а выходы подключены соответственно к входам второго суммирующего усилителя, выход которого подключен к второму входу второго интегратора.
Источники информации, принятые во внимание при экспертизе
