вторым информационным входом второго интегросумматора и с первым информационным входом седьмого интегросумматора, выхо которого подключен к входу первого операционного усилителя, выход которого соединен с третьими информационными входами третьего и шестого интегросумматоров и с первым информационным входом восьмого интегросумматора, выход которого является первым выходом устройства и подключен к второму информационному входу седьмого интегросумматора, второй информационный вход восьмого интегросумматора соединен с входом задания внешнего момента, приложенного к левому валу механической передачи устройства выход четвертого интегросумматора подключен к информационному входу второго ограничителя напряжения, первый управляющий вход которого соединен с выходом четвертого инвертора, вход, которого является входом задания напряжения, передаваемого правым бортовым фрикционом устройства,и подключен . к второму управляющему входу второго ограничителя напряжения, выход которого соединен с вторым входом первого сумматора и с первым информационным входом девятого интегросумматора, вьТХод и второй информационный вход которого подключены к одной паре вершин третьего мостового выпрямителя, другая пара вершин которого соединена с первыми выводами ограничительных резисторов третьей пары, вторьге выводы которых
подключены соответственно, к входу и выходу пятого инвертора, вход которого является вторым входом задания тормозного момента, Приложенного к солнечной шестерне механической передачи устройства, выход девятого интегросумматора подключен к второму информационному входу четвертого интегросумматора и к первому информационному входу десятого интегросумматора, выход которого соединен с входом второго операционного усилителя, выход которого подключен к третьему информационному входу девятого интегросумматора, к четвертому информационному входу третьего интегросумматора и к первому информационному входу одиннадцатого интегросумматора, второй информационный вход которого является входом задания внешнего момента, приложенного к правому валу механической передачи устройства, выход одиннадцатого интегросумматора соединен с вторым информационным входом десятого интегросумматора и является вторым выходом устройства третий информационный вход которого подключей к выходу третьего интегросумматора, выход элемента ИЛИ соединен с вторым информационным входом второго коммутатора, первый и второй входы элемента ИЛИ соединены соответственно с первым и вторым выходами датчика положения рычага переключения передач, группа выходов четвертого
коммутатора соединена с группой входов пятого интегросумматора..
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования динамики движения гусеничной машины | 1983 |
|
SU1193698A1 |
| Устройство для моделирования механической передачи | 1985 |
|
SU1254515A1 |
| Устройство для моделирования механической передачи | 1982 |
|
SU1091192A2 |
| Устройство для моделирования механической передачи | 1981 |
|
SU1001124A1 |
| Устройство для моделирования динамики движения гусеничной машины | 1980 |
|
SU940186A2 |
| Кинотренажер водителя гусеничной машины | 1987 |
|
SU1531707A1 |
| Устройство для моделирования механической передачи | 1984 |
|
SU1196912A2 |
| Устройство для моделирования механической передачи | 1981 |
|
SU982032A2 |
| Устройство для моделирования механической передачи | 1981 |
|
SU982031A1 |
| Устройство для моделирования механической передачи | 1982 |
|
SU1068953A1 |
УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ МЕХАНИЧЕСКОЙ ПЕРЕДАЧИ, содержащее первый коммутатор, первый сумматор, источник разнополярного иапряжения, последовательио соединенные первый интегросумматор и первый инвертор, последовательно соеднненные второй интегросумматор и первый ограничитель напряжения,- причем выход второго коммутатора подключен к информационному входу третьего коммутатора, вьгходы которого подключены к входам второго сумматора, выход которого соединен с первым информационным входом третьего интегросумматора; выход и. второй информационный вход которого подключены к одной паре вершин первого мостового вцррямителя, другая пара вершин которого соединена соответственно с первыми выводами первой пары ограничительных резисторов, выход третьего интегросумматора подключен к информационному входу четверTofo коммутатора, управляющие входы третьего и четвертого коммутаторов соединены с группой вь1ходов датчика положения рычага переключения передач, первый выход которого подключен к )Т1равляющему входу первого коммутатора, отличающееся тем, что, с целью расширения функциональных возможностей за счет моделирования двухпоточной механической передачи с одним входнь1м валом и двумя выходными, оно дополнительно содержит мостовые выпрямители, две пары ограничительных резисторов, инверторы, элемент ИЛИ, второй ограничитель напряжения, операционные усилители и интегросумматоры, причем выход первого сумматора соединен с первым информационным входом первого интегросумматора, второй информационный вход которого является входом задания крутящего момента устройства, выход первого инвертора подключен к первым информационным входам второго, четвертого и входом пятого интегросумматоров, выход пятого интегросумматора соединен с первым информационным входом второго коммутатора, выход которого подключен к третьему информационному входу первого интегросумматора, вторые выводы первой пары ограничительных резисторов соединены с выходами первого коммутатора, информационные входы которого подключены к шинам источника разнополярного напряжения, д выход второго инвертора соединен с первым управляющим входом первого ограничителя напряжения, второй управляющий вход которого и выход второго инвертора объединены и подключены к входу задания напряжения, передаваемого левым бортовым фрикционом устройства, выход первого ограничителя напряжения соединен с первым входом первого д д сумматора и с первьпч информационным входом шестого интегросумматора, - выход и вто - рой информационнный вход которого подключены к одной паре вершин второго мостового выпрямителя, другая пара вернппг которого соединена с первыми выводами ограничительных резисторов второй пары, вторые выводы которых подключены соответственно к входу и выходу третьего инвертора, вход которого является первым входом задания тормозного момента, приложенного к солнечной шестерне механической передачи устройства, выход шестого янтегросумматора оординен с
Изобретение ртносится к аналоговой вычислительной технике и может быть использовано в тренажерах транспортных средств и исследовательских стендах.
Цель изобретения - расширение функциональных возможностей за счет моделирования двухпоточной механической передачи с одним входным валом и двумя выходными.
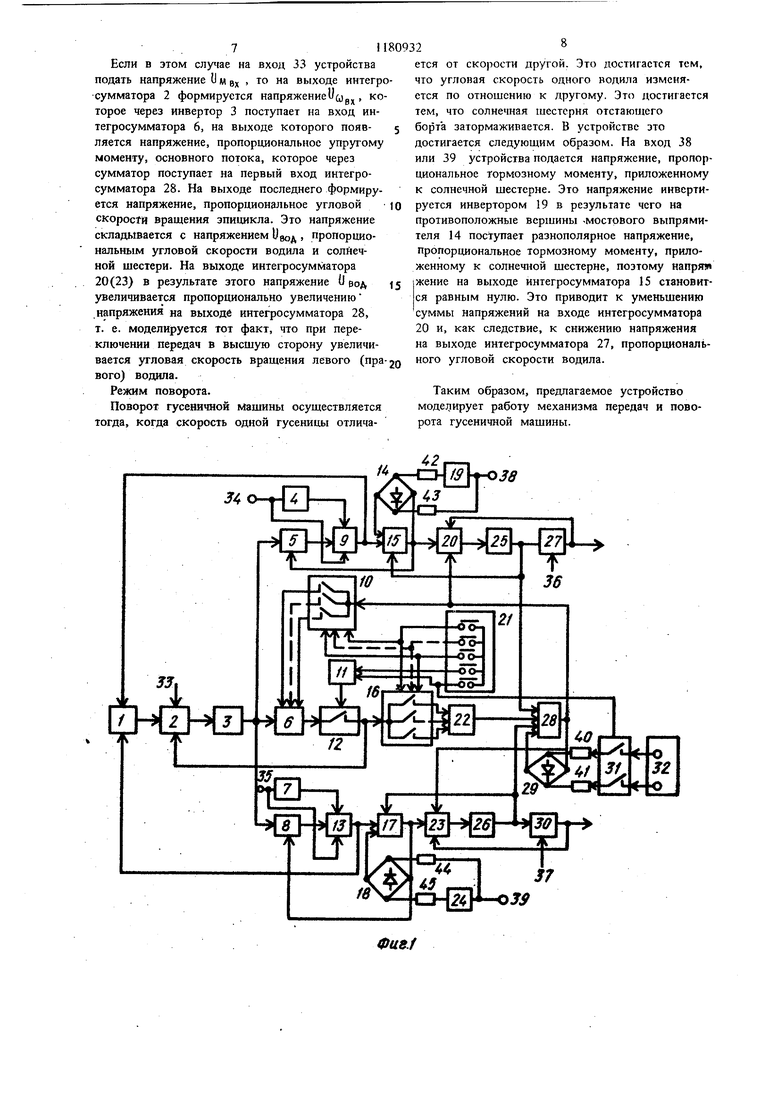
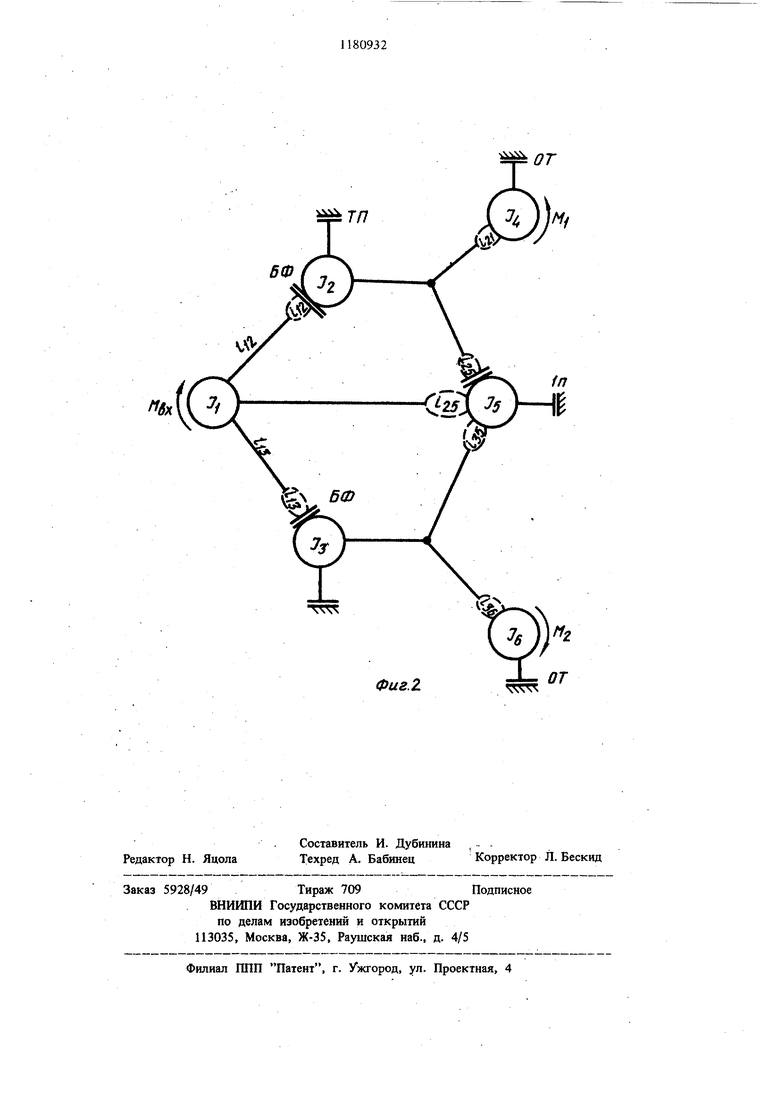
На фиг. 1 представлено устройство для моделирования механической передачи; на фиг. 2 - динамическая схема.
Устройство содержит-первый сумматор 1, первый интегросумматор 2, первый и второй инверторы 3 и 4, второй и пятый интегросумматоры 5 и 6, четвертый инвертор 7, четвертый интегросумматор 8, первый ограничитель 9 напряжения, четвертый коммутатор 10, элемент ИЛИ 11, второй коммутатор 12, второй ограничитель 13 напряжения, второй мостовой выпрямитель 14, шестой
интегросумматор 15, третий коммутатор 16, девятый интегросумматор 17, третий мостовой вьшрямитель 1, третий инвертор 19, , седьмой интегросумматор 20, датчик 21 положения рычага переключения передач, второй сумматор 22, десятый интегросумматор 23, пятый инверторГ 24, первый и второй операционные усилители 25 и 26, восьмой и
третий интегросумматоры 27 и 28, первый мостовой выпрямитель 29, одиннадцатый интегросумматор 30, первый ком1иутатор 31, источник 32 разнополярного напряжения, входы 33 -39 устройства и органичителъные резисторы 40-45. На фиг. 2 введены следующие обозначения: i - суммарная податливость между 1} кинематическими точками; J - суммарный момент инерции, приведенный к ведомы частям главного фрикциона; - бортовой фрикцион; 1 ji - передаточное число между 1J кинематическими точками; З и мо мент инерции, приведенный к солнечным шестерйям; Tfl - тормоз поворота; 0 и Jg моменты инерции, приведенные соответственн к левому и правому выходным валам S момент инерции, приведенный к эпициклу 5Г крутящий момент,действующий на вхо ной вал. Для тех задач, которые предлагаемое устройство должно рещать в тренажере, динамич кая схема имеет вид, представленный на фиг. 2. .Механизм имеет один входной и дв выходных вала. Управление механизмом осуществляется с помощью двух бортовых фрикционов, двух тормозов поворота, двух остановочных тормозов и рычага переключения передач. Математическая модель движения данной системы имеет вид: j , « T-lMBx-Mu-Mas-AA,,) т(ГЬ2Иг) M,(u,-i,,055 4 ) «15 (i|jM,-i-Mp,-Mi.,) ,(П,М,,-МР,-МТ 3(12 5 2514 РГ г) (2-Ч4М4-1г5 5) () W4y(,-M,-WoT) (.- 2-Мот) В основу построения модели данного устройства положена система приведенных дифференциальных уравнений. Любое дифференциальное уравнение рещает ся интегрированием, поэтому каждое уравнение системы рещается с помощью соответству ющего интегросумматора, на входы которого подаются напряжения, пропорциональные переменным величинам, входящим в правую 24 часть уравнений. На выходе интегросумматоров формируется напряжение, пронорциональное величине, стоящей в левой части уравнеУравнения (1),{5),(6).(7),(Ш) и (П), описывающие движение масс, моделируются соответственно Интерросумматорами 2, 15, 17, 28, 27 и 30. Уравнения (2),(3),(4),(8) и (9), описывающие, упругие связи, моделируются соответственно интегросумматорами 5, 6, 8, 20 И 23. Устройство работает следующим образом. Режим нейтрали. В этом случае на третьем выходе датчика 31 положения рычага переключения передач появляется сигнал, соответствующий логической единице (наостальных выходах - логический ноль). Этот сигнал, проходя через элемент ИЛИ 11 и инвертируясь в нем, отклйочает коммутатор, при этом ключи коммзтаторов 10, 16 и 31 отключены, так как на остальных выходах датчика переключения передач имеется сигнал, соответствующий логическому нулю. Если на вход 33 устройства подать напряжение U пропорциональное крутящему моменту, то на выходе интегросумматора 2 появляется напряжение исОр,пропорциональ; ное угловой скоростИ вращения вхсйхного вала моделируемого механизма. Это напря- t женке через инвертор 3 (необходим для cotласования по знаку напряжения О со рх) поступает на первые входы интегросумматоров 5, 6 и 8, моделирующих податливости связей между входом механизма и эпициклом (интегросумматор 28), входом механизма и левой (интегросумматор 15) и правой (ингегросумматер 17) солнечными шестернями. В результате на выходах интегросумматоров 5,6 и 8 появляются напряжения UM.UMJ и (1мз Р порциональные моментам упругих сил в соот- . ветствующих связях. Напряжение U/o, далее никуда не проходит, так как коммутатор 12 разомкнут. Напряжение U, () поступает на вход ограничителя 9(13), который моделирует работу левого (правого) бортового фрикциона. На управляющие входы ограничителя 9(13) подаются разнополярные напряжения, которые определяют .уровень ограничения ограничителя, моделируя тем самЫм значение момента, который может передавать фрикцион. Если на вход 34(35) устройства подать напряжение, соответствующее максимальному на1}ряженшо, передавае мому бортовым фрикционом. То в этом случае на выходе ограничителя 9(13) будет напряжение О Мси(0;ц,, пропорциональное моменту, приложенному к валу левой (правой) солнечной шестерни. Напряжение Омсы, dUdJ поступает на инте росумматор 15(17), /на выходе которого фор мируется напряжение ( Иу), пропор циональное угловой скорости вращения солнечной шестерни. Напряжения ид«сц, иОмсы поступают такж на первый и второй входы сумматора 1, на выходе которого формируется напряжение, пропорциональное сумме Jcu, напряжение поступает на второй вход интегросумматора 2, причем оно по знаку противоположно напряжению U м pj В результате заряд интегросумматора 2 замедляется, что соответствует увеличению нагрузки на входно валу при раскрзчиванни моделируемого меха низма. Напряжение W (U ы ц ) поступает на интегросумматор 20(23), на выходе которого появляется напряжение 11д, (1/д, ), пропорциональное упругому моменту, действующему в планетарном ряде. Это напряжение через , усилители 25 и 26, которые служат для инвертирования и учета передаточного числа планетарного ряда, поступает на входы интег росумматоров 27 и 30 и четвертый и третий входы интегросумматора 28. На выходе инте росумматоров 27 и 30 формируется напряже кие, пропорциональное угловой скорости лев го и Правого водила, а на выходе интегросумматора 28 - напряжение, пропорциональное угловой скорости эпицикла. Если в этом случае на входы 37 и 38 устройства подать хотя бы небольшое напряжение, пропорциональное моменту сопрбтивле ния вращения левого и правого водила, то напряжение на выходе интегросумматоров 27 и 30 будет уменьшаться до нуля при пропорциональном увеличении напряжения . на выходе интегросумматора 28, что соответ ствует увеличению угловой скорости эпицикла при остановке водил. Это изменение напряжений происходит за счет того, что при установившемся режиме сумма напряжения на выходах интегросумматоров 20 и 23 должна быть постоянной, а так как при появлении напряжения, пропорционального моменту сопротивления вращения левого и правою водила, напряже ния на выходах интегросумматоров 27 и 28 уменьшаются, то для сохранения указанной суммы необходимо увеличение напряжения на выходе интегросумматора 28. Следователь но, при включенной нейтрали напряжения }ia первом и втором выходе устройства равны нулю при наличии напряжения на выходе интегросумматора 28, что соответствует вращению эпицикла в холостую. Режим включенной первой передачи. При этом режиме в механизме-эпицикл затормаживается, и передача мощности происходит только через планетарные ряды. В этом случае в устройстве замыкается микропереключатель датчика 21 (не показан), соответствующий включению первой передачи. В результате на втором выходе датчика 21 появляется сигнал логической единицы, который через элемент ИЛИ 11 отключает коммутатор 12 и включает коммутатор 31, с помощью которого от источника 32 разнополярного напряжения подаются напряжения на мостовой выпрямитель 29. Последний служит для того, чтобы предотвратить заряд интегросумматора 28 от напряжения, пропорционального силе торможения эпицикла. В результате на выходе интегросумматора 28 при включении первой пере- дачи напряжение всегда равно нулю. Если в этом случае на вход 33 устройства подать напряжение и то на выходе интегросумматора 2 появляется напряжение Ua)g, которое проходит через инвертор 3, необходимый для согласования напряжения знаку, затем напряжение ы д поступает на входы интегросумматоров 5, 6 и 8. Причем интегросумматор 6 заряжается до напряжения насыщения, далее это напряжение не проходит, так как коммутатор 12 разразомкнут. Формирование напряжения, пропорционального угловой скорости левого (правого) водила на выходах интегросумматоров 27 (30) осуществляется так же, как и в аервом режиме. Отличие заключается в том, что на выходное напряжение интегросумматоров 27 и 30 не будет оказывать влияние выходное напряжение интегросумматора 28, пропорциональное угловой скорости эпицикла, так как оно всегда равно нулю. В этом случае крутящий момент передается только через планетарные ряды. Режим включенных передач выше первой. При этом режиме на выходе датчика 21 появляется сигнал, соответствующий включение какой-либо передачи, например второй. В этом случае замыкаетсй соответствующий ключ коммутаторов 16 и 10, с помощью которых выход интегросумматора 6 (коммутатор 12 замкнут) подключается к соответствующему входу сумматора 22 и выход интегросумматора 28 соединяется с соответствующим входом интегросумматора 6. Коэффициент передаш по соответствующему входу сумматора определяет коэффициент передачи основного потока по моменту, а коэффициент передачи по входу интегросумматора 6 определяет ко-, эффициент передачи основного пот-жа по оборотам. Коммутатор 31 разомкнут.
Если в этом случае на вход 33 устройства подать напряжение 11 н вх ° выходе интегро сумматора 2 формируется напряжение со, которое через инвертор 3 поступает на вход интегросумматора 6, на выходе которого появляется напряжение, пропорциональное упругому моменту, основного потока, которое через сумматор поступает на первый вход интегросумматора 28. На выходе последнего формируется напряжение, пропорциональное угловой ю скорости вращения эпицикла. Это напряжение складывается с напряжением UBOA пропорциональным угловой скорости водила и солнечной шестери. На выходе интегросумматора 20(23) в результате этого напряжение (J вод увеличивается пропорционально увеличению напряжения на выходе интегросумматора 28, т. е. моделируется тот факт, что при переключении передач в высшую сторону увеличивается угловая скорость вращения левого (правого) водила.
Режим поворота.
Поворот гусенитаой машины осуществляется тогда, когда скорость одной гусеницы отличал
ется от скорости другой. Это достигается тем, что угловая скорость одного водила изменяется по отношению к другому. Это достигается тем, что солнечная шестерня отстающего борта затормаживается. В устройстве это достигается следующим образом. На вход 38 или 39 устройства подается напряжение, пропорциональное тормозному моменту, приложенному к солнечной шестерне. Это напряжение инвертируется инвертором 19 в результате чего на Противоположные вершины -мостового выпрямителя 14 поступает разнополярное напряжение. Пропорциональное тормозному моменту, приложенному к солнечной шестерне, поэтому напря жение на выходе интегросумматора 15 становится равным нулю. Это приводит к уменьшению суммы напряжений на входе интегросумматора 20 и, как следствие, к снижению напряжения на выходе интегросумматора 27, пропорционального угловой скорости водила.
Таким образом, предлагаемое устройство моделирует работу механизма передач и поворота гусеничной машины. М
тг
уЧУЧЧ
Фиг. 2
чччч
| Устройство для моделирования механической передачи | 1981 |
|
SU995102A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для моделирования механической передачи | 1981 |
|
SU1001124A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
