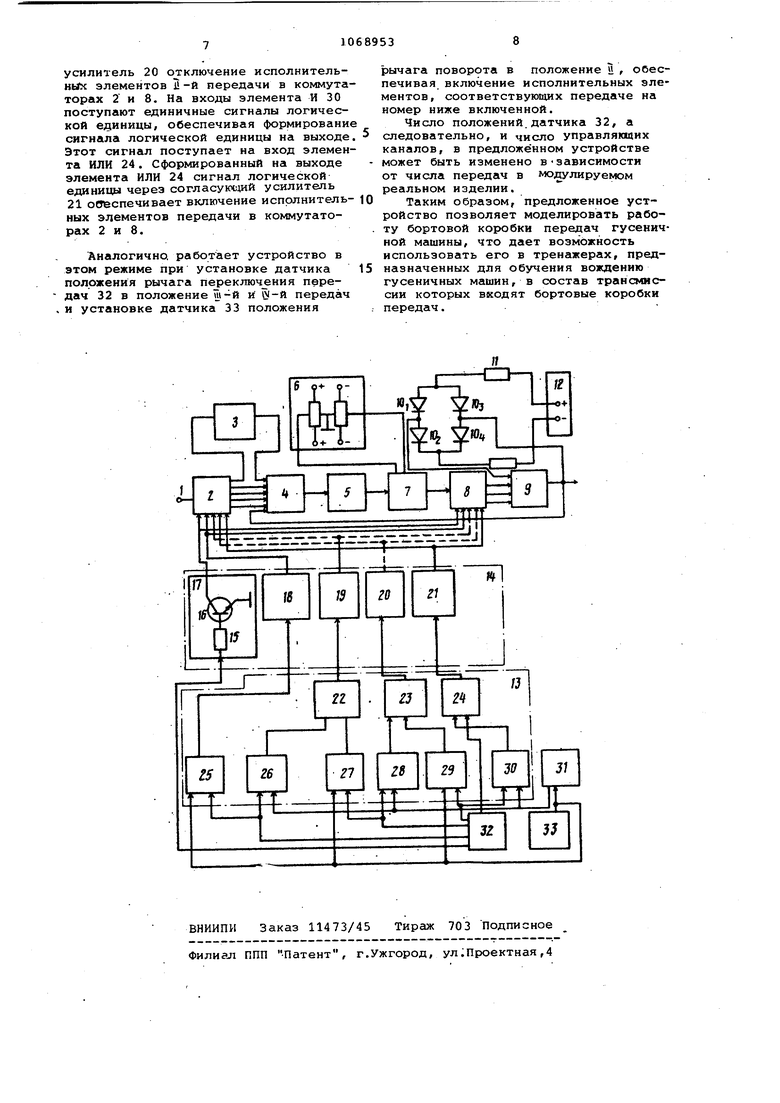
Изобретение относится к аналоговычислительной технике и может быть использовано в тренажерах транспорт ных средств и исследовательских сте Дах. Известно устройство для моделирования механической передачи, содержащее последовательно соединенные первый интегратор, усилитель, ограничитель и первый коммутатор, выходы которого соединены с группой входов второго интегратора, выход j OTOporo непосредственно и через мостовой выпрямитель соответственно соединен с первым входом первого ин тегратора, и входом второго интеграт ра,группа входов первого интегратор подключена к группе выходов второго коммутатора,вход которого является входом устройства, выход второго . коммутатора через инвертор соединен с вторым входом первого интегратора СП. Наиболее близким по технической сущности к изобретению является устройство для моделирования механичес кой передачи, содержащее последовательно соединенные первый коммутатор, первый интегратор,усилитель,огра ничитель, второй коммутатор и второй интегратор, второй вход и выход которого соединены с одной парой вершин мостового выпрямителя, другая пара йершин которого через ограничительные резисторы соединена с источником напряжения, управляющие входы ограничителя подключены к выходам датчика фрикциона, первый вход первого интегратора через первый инвертор подключен к первому выходу первого коммутатора, управляю щие входы первого, второго и третьего коммутаторов соединены соответственно с выходами датчика переключателя передач, вход третьего коммутатора подключен к выходу датчика тгормоза поворота, а выход - к первому входу сумматора,второй вход кото рого соединен с выходом датчика остановочного тормоза,а выход - с входом второго инвертора, вход и выход которого через резисторы соединены с ограничительными резисторами, третий вход и выход сумматора подключены к одной паре вершин второго мостово,го выпрямителя, другая пара вершин которого через соответствующие огра ничительные резисторы соединена с источником напряжения L21. Однако с ПОМОЩЬЮизвестного устройства нельзя моделировать работу бортовой коробки передач гусеничной машины, управление которой, кроме рычага переключения передач,, осуществляется с помощью рычага поворота, причем последовательность управления рычагом поворота следукицая: при вклю ченной передаче, кроме первой и заднего хода, и установке рычага поворота из исходного положения 1 в положение 1: (водитель берет рычаг на себя) происходит понижение номера включенной передачи. Целью изобретения является расширение функциональных возможностей за счет воспроизведения режимов работы бортовой коробки передач,, управляемой рычагом поворота. Эта цель достигается тем, что в устройство, содержащее датчик положения переключателя передач, элемент НЕ, первый коммутатор, информационный вход которого является входом устройства, а группа выходов соединена соответственно с группой входов первого интегратора, выход которого через последовательно соединенные усилитель и ограничитель подключен к информационному входу второго коммутатора, группа выходов которого соединена с группой входов второго интегратора, выход которого является выходом устройства и соединен с первым входом, первого интегратора, второй вход которого через инвертор соедине.н с первым выходом первого коммутатора, управляющие входы ограничителя соединены соответственно с выходами датчика силы сцепления бортового фрикциона, первый вход и выход второго интегратора соединены соответственно с первой парой вершин мостового выпрямителя, вторая пара вершин которого через ограничительные резисторы соединена с соответствующими выходами источника двухполярного напряжения, первый,, второй, третий и четвертый входы третьего коммутатора соединены соответственно с первым/ вторым, третьим и четвертым выходами датчика положения переключателя передач, введены датчик положения рычага поворота и блок согласующих усилителей, причем первый, второй, третий, четвертый и пятый входы блока согласующих .усилителей подключены соответственно к первому, второму, третьему, четвертому выходам третьего коммутатора и пятому выходу датчика положения переключателя передач, выход датчика положения рычага поворота соединен .с пятым входом третьего коммутатора и входом элемента НЕ, выход которого подключен к шестому входу третьего коммутатора. На чертеже изображена схема предлагаемого устройства. Устройство, входом которого является вход 1 первого коммутатора 2, содержит инвертор 3, первый интегратор 4,- усилитель 5, датчик б силы сцепления бортового фрикциона, ограничитель 7, второй коммутатор 8, второй интегратор 9, мостовой выпрямитель 10 на диодах 10 - 10, , ограничительные резисторы 11, источник
12двухполярного напряжения, третий коммутатор 13, блок 14 согласующих усилителей. Резистор 15 и тpaRзиcтop 16 образуют согласующие усилители 17-21, В состав третьего коммутатора
13входят элементы ИЛИ 22 - 24 и элементы И 25-30.
Устройство содержит также элеменя: НЕ 31, датчик 32 положения переклю|Чателя передач и датчик 33 положения рычага поворота.
Устройство работает следующим образом. .
Датчик 32 рычага переключения передач, который представляет собой, например, группу микропереключателей, механически связанных с рычагом переключения передач при установке рычага переключения передач в опреде ленное положение вьщает на соответствующий в.ыход сигнал логической единицы, сохраняя на остальных выходах сигнал логического нуля.
Датчик 33 положения рычага поворо та механически, связан с рычагом поворота и может представлять собой, например, группу миркопереключателей. Механически с рычагом поворота связан и -датчик б силы сцепления бортового фрикциона.
При установке рычага поворота в исходное положение I на выходе датчика 33 формируется сигнал единицы, а датчик 6 обеспечивает максимальные управляющие сигналы на ограничителе 7. При установке рычага поворота в положение, среднее между Хим.-, датчик 6 бортового фрикциона обеспечивает нулевой уровень ограничения ограничителя 7, а на выходе датчика 33 рычага поворота формируется сигна логического нуля. В реальном изделии в брртовой коробке передач происходит выключение включенной передачи и подготовка к включению передачи на номер ниже включенной. При уста новке рычага поворота в положение S датчик 6 бортового фрикциона вновь обеспечивает максимальные управляющие сигналы на ограничителе 7, а дат jlик 33 рычага поворота на выходе сохраняет сигнал логического нуля. В реальном изделии это соответствует полному включению передачи на номер ниже включенной. Элемент НЕ 31 инвер тирует сигнал, поступающий с датчика 33 рычага поворота.
Устройство имеет два режима работы в зависимости от положения рычага поворота.
При первом режиме работы рычаг поворота установлен в исходное положение I , на выходе датчика 33 имеется сигнал, единицы, а на выходе элемента НЕ 31.- нулевой сигнал. При установке рычага переключения передач в положение, соответствующее переда е заднего хода, единичный сигнал с пятого выхода датчика 32 рычага переключения передач поступает на первый согласующий усилитель 17.
Согласующие усилители 17 - 21 преобразуют сигналы в сигналы, необходимые для включения исполнительных элементов в первом 2 и втором 8 коммутаторах. Согласующий усилитель представляет, например, электронный транзисторный ключ, в коллекторную цепь которого включены реле, являющиеся исполнительными элементами в коммутаторах 2 и 8, поэтому сигнал с согласующегоусилителя 17 обеспечивает включение исполнительных элементов, соответствующих передаче згщнего хода. Эти исполнительные элементы подключают напряжение, пропорцинальное оборотам входного вала коробки передач и поступающее на вход J коммутатора 2, к определенному входу интегратора 4. Коэффициент передачи каждого входа интегратора выбран с учетом передаточного числа коробки передач. При включении передачи заднего хода напряжение, пропорциональное оборотам входного вала коробки передач, поступает на соответствующий вход интегратора 4 через инвертор 3, чем достигается изменение полярности отноЬительно напряжения, пропорционального оборотам выходного Bzuia -коробки передач. Это напряжение снимается с выхода интегратора 9. Исполнительные элементы коммутатора 8 соединяют выход ограничителя 7 с определенным входом интегратора 9, На входе интегратора 4 напряжения, пропорциональные оборотам входного и выходного валов коробки передач, складываются и на выходе интегратора 4 образуется напряжение, пропорциональное Действующему крутящему моменту.
При этом решается уравнение: сМИ
/1 ;7г- УьУву-ьавыч
где И. - суммарная податливость элементов коробки передач; М - крутящий момент; U)j (Лцач. обороты входного и выходно го вала коробки передач L - передаточное число коробки
передач.
Напряжение, пропорциональное крутящему моменту, через усилитель 5 поступает на ограничитель 7, который моделирует нелинейность типа Сухое трение. Этот ограничитель ограничивает напряжение, пропорциональное крутящему моменту (U). Уровень ограничения определяется управляющими напряжениями, поступающими с датчика 6. Эти напряжения пропорциональны
моменту, передаваемому фрикцион-ными элементами коробки передач. Если напряжение UKV проходит через ограничитель с ограничением, моделируется буксование Фрикционных элементов, если напряжение UN ограничено полностью, моделируются полностью выключенные фрикционные элементы. Йа чертеже показан случай Полнбго ограничения, когда управляющие напряжения с датчика б равны нулю. В случае подачи управляющих напряжений по величине больших U, модулируется передача момента без «буксования.г.
Напряжение UM с выхода ограничителя 7 через исполнительные элементы коммутатора 8 поступает на определенный вход интегратора 9. Коэффициент передачи по соответствующему входу интегратора пропорционален передаточному числу коробки передач для данной передачи.
С помсядью интегратора 9 решается уравнение:
.M-M,
1
.( ...
где О среднее значение момента инерции вращающихся масс коробки передач, приведенных к выходному валу коробки передач; М --крутящий момент; I - передаточное число; MC - момент сопротивления вращению.
Напряжение, пропорциональное моменту сопротивления вращению подается .на вход интегратора 9 от источника 12 двухполярного напряжения через ограничительные резисторы 11 и мостовой выпрямитель 10, собранный на диодах 10ц . Таким образом, предлагаемое устройство для моде;1иро.вания механической передачи воспроизводит работу бортовой коробКи передач с фрикционными элементами при включении передачи заднего хода.
При установке рычага переключения передач в положение, соответствующее .1 -и передаче, на пятом выходе датчика 32 появляется сигнал логического нуля, обеспечивающий отключение исполнительных, элементов передачи заднего хода в коммутаторах 2 и 8, а на первом выходе датчика появляется ; сигнал логической единицы, который поступает на вход элемента ИЛИ 24, на вход которого поступает сигнал логического нуля с выхода элемента И 30. Образующийся на выходе элемента ИЛИ 24 сигнал единицы через; согласующий усилитель 21 обеспечивает включение исполнительных элементов передачи в коммутаторах 2 и 8-. Далее устройство работает как и при включений передачи заднего хода.
Отличие заключается лишь в том, что напряжение, пропорциональное оборотам входного вала коробки передач, с входа 1 коммутатора 2 подается на вход интегратора 4 напрямую, минуя инвертор 3. При установке датчика
32 в положение 1-й передачи на втором выходе датчика появляется сигнал логической единицы, а на остальных выходах датчика - сигналы логическо0 го нуля, поэтому на входы элемента ИЛИ 24 поступают сигналы логического нуля с вйхода элемента И 30 и с пер- . вого выхода датчика 32. Сигнал логит ческого нуля, сформированный на выхо5 де элемента ИЛИ 24, обеспечивает через согласукщий усилитель 21 отключение исполнительных элементов U -и передачи в коммутаторах 2 и 8. На вход элемента И 29 поступают сигналы
0 .логических единиц с датчика 33 рычага поворота и второго выхода датчика 32 переключения передач, поэтому на выходе элемента И 29 формируется сигнал логической единицы, который
5 поступает на вход элемента ИЛИ 23. .Яа другой его вход с выхода элемента И 28 поступает сигнал логического нуля. Сформировг1.нный элементом ИЛИ 23 сигнал логической единицы через
л согласующий усилитель 20 обеспечивает -включение исполнительных элементов Ti -и передачи в коммутаторах 2 и 8.
Аналогично устройство работает при установке датчика положения рычага переключения передач 32 в положение ffi -и и W -и передач.
При Ътором режиме работы рычаг пово.рота установлен в положение IJ ,на выхо0 де датчика 33 рычага поворота формируется сигнал логического нуля, а на выходе элемента НЕ 31 - сигнал логической единицы. При установке датчи,ка 32 в положение, соответствующее
5 передаче заднего хода или I-и передаче, устройство работает так же, как.и в первом режиме работы.
При установке датчика 32 положен ния рычага переключения передач в положение Ti -и передачи устройство работает следующим образом. На вхо-. ды элемента И 28 поступают сигналы логического нуля с третьего выхода датчика 32 и логической единицы с элемента НЕ 31. Сформированный сигнал логического нуля с выхода элемента И 28 поступае,т на вход элемента ИЛИ 23. На ВХОДЫ: элемента И 29 поступают сигналы логического нуля с датчика 33 и логической единицы
0 с датчика 32, поэтому на его выходе формируется сигнал логического нуля, посту1тающий на другой вход элемента ИЛИ 23. Сформированный сигнал логического нуля на выходе элемента ИЛИ
5 23 обеспечивает через согласующий

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования механической передачи | 1982 |
|
SU1091192A2 |
| Устройство для моделирования механической передачи | 1985 |
|
SU1254515A1 |
| Устройство для моделирования динамики движения гусеничной машины | 1980 |
|
SU940186A2 |
| Устройство для моделирования механической передачи | 1981 |
|
SU1001124A1 |
| Устройство для моделирования механической передачи | 1984 |
|
SU1196912A2 |
| Устройство для моделирования механической передачи | 1983 |
|
SU1180932A1 |
| Кинотренажер водителя гусеничной машины | 1987 |
|
SU1531707A1 |
| Устройство для моделирования механической передачи | 1981 |
|
SU982032A2 |
| Устройство для моделирования механической передачи | 1980 |
|
SU960862A2 |
| Устройство для моделирования механической передачи | 1984 |
|
SU1233681A1 |
УСТРОЙСТЮ ДЛЯ МОДЕЛИРОВАНИЯ МЕХАНИЧЕСКОЙ ПЕРЕДАЧИ, содержащее датчик положения переключателя передач,элемент НЕ,первый коммутатор, информационный вход которого является входом устройства, а группа выходов соединена соответственно с группой входов пёрво1:о интегратора, выход которого через последовательно соединенные усилитель и ограничитель подключен к информационному входу второго коммутатора, группа выходов которого соединена - с группой входов . второго интегратора, выход которого является выходом устройства и соединен с первым входом первого интегратора, второй вход которого через инвертор соединен с первым выходом первого коммутатора, управляющие входы ограничителя соединены соответственно с выходами датчика силы сцепления 1бортового фрикциона, первый вход и выход второго интегратора соединены соответственно с первой парой вершин мостового выпрямителя, вторая пара вершин которого через ограничительные резисторы соединена с соответствующими выходами источника двухполйрного напряжения, первый, второй, третий и четвертый входы третьего коммутатора соединены соответственно с первым, вторым; третьим и четвертым выходами датчика положения переключателя передач, отличающееся тем, что, с целью расширения функциональных возможностей за счет воспроизведения режимов работы бортовой коробки переда 1, управляеS мой рычаге поворота, оно дополнительно содержит датчик положения рычага поворота и блок согласующих усилителей, пр1ичем первый, второй, третий, четвертый и пятый входы блока согласующих усилителей подключены соответственно к первому, второму, третьему, четвертому выходам третьего коммутатора и пятому выходу датчика положения переключателя передач, вы05 00 ход датчика положения рычага поворота соединен с пя-тым входом третьего коммутатора и входом элемента НЕ, высо ход которого подключен к шестому СП входу третьего коммутатора. СдЭ
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Ракетная самоходная установка | 2021 |
|
RU2809496C2 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
