Изобретение относится к аналого- вычислительной технике и может быть использовано в тренажерах транспортных средств.
Цель изобретения расширение функциональных возможностей устройства путем воспроизведения влияния синхронизаторов на работу коробки передач.
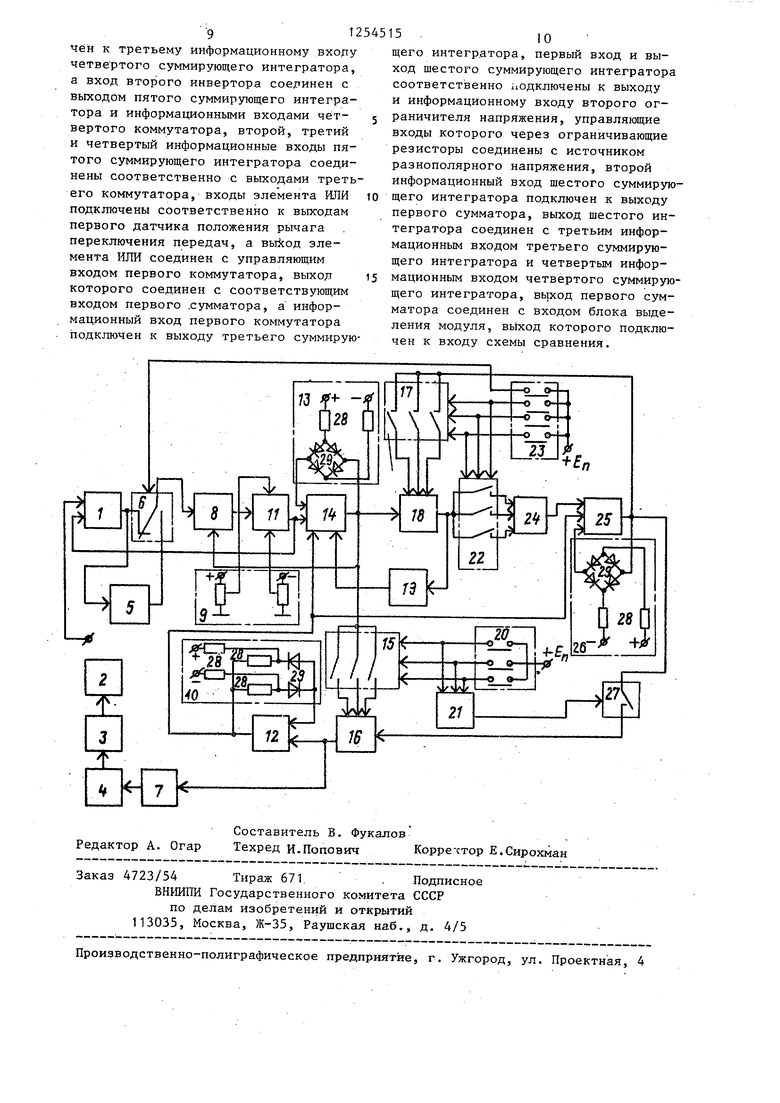
На чертеже представлена схема предлагае мого устройства.
Устройство содержит первьм суммирующий интегратор 1, исполнительный блок 2, усилитель 3, схему 4 сравнения, первый инвертор 5, пятый коммутатор 6, блок 7 выделения модуля напряжения, второй суммиру 01ций интегратор 8, датчик 9 напряжения фрик циоиа, второй ограничитель 10 напряжения, первый ограничитель 11 напряжения, шестой суммирующий интегратор 12, второй мостовой выпрямитель 13, четвертьй суммирующий интегратор 14 второй коммутатор 15, первый сумматор 16, третий коммутатор 17, пятый суммирующий интегратор 18, второй инвертор 19, первый датчик 20 пололс ния рычага переключения передач, ., элемент ИЛИ 21, четвертый коммутатор 22, второй датчик 23 положения рычага переключения передач, второй сумматор 24, третий суммирующий интегратор 25, первый мостовой выпрямитель 26, первый .коммутатор 27, резисторы 28 и диоды 29.
Устройство работает следующим образом.
При нейтральном положении механима переключения передач ни одна из передач не.включена. Кинематически связанные с механизмом переключения передач первый и второй датчики 20 и 23 переключения передач отключены
Поскольку сигналы управления от датчиков 20 и 23 на управляющие входы коммутаторов 15, 17, 22 и 27 не поданы, коммутационные цепи последних разорваны.
Р:СЛИ на вход интегратора 1 подат напряжение U, ,, пропорциональное крутящему моменту, приложенному к выходному валу коробки, па выходе интегратора 1 появляется напряжение и , пропорциональное оборотам входного вала коробки передач. Постоянная времени интегратора 1 определяет момент инерции вращающихся масс, находящихся в постоянном зацеплении с входным валом и приведен
5
0
5
0
5
0
5
50
55
ных к нему. Это напряжение поступает через коммутатор 6 на вход интегратора 8,
Интегратор 8 формирует напряжение и„у, пропорциональное моменту упругих сил, возникающих в результате деформации вращающихся масс и входного вала коробки передач. Постоянная времени интегратора 8 определяет податливость деформируемых частей входного вала и вращающихся масс, находящихся с ним в постоянном зацеплении. Это напряжение поступает на вход ограничителя 11, ас его выхода - на вход суммирующего интегратора 14.
Огранчитель 11 и датчик 9 напряжения фрикциона моделируют работу фрикциона. Величина напряжения на управляющих входах ограничителя 11 определяет состояние фрикциона. При максимальном напряжении с датчика 9 ограничитель полностью открыт. Это соответствует замкнутому фрикциону и передаче через ограничитель 11 напряжения без ограничения по амплитуде. При уменьшении папряжения на датчике 9 напряжение на ограничивающих входах ограничителя 11 уменьшается, ограничиваются и напряжения, проходящие через него. Если напряжение на датчике 9 равно О, напряжение, проходящее через ограничитель 11, ограничивается до 0. Такое состояние соответствует режиму разомкнутого фрикциона.
При замкнутом фрикционе напряжение и,У формирует на выходе суммирующего интегратора 14 напряжение U , пропорциональное ведущим частям коробки передач, находящихся в постоянном зацеплении, а постоянная времени интегратора 14 определяет их момент инерции. Это напряжение подается на ВХОД суммирующего интегратора 18, на выходе которого формируется напряжение U , пропорциональное моменту упругих связей ведущих частей коробки передач, находящихся в постоянном зацеплении. Постоянная времени интегратора 18 определяет податливость деформируемых ведущих частей коробки передач.
Через мостовой выпрямитель 13 от источника разнополярного напряжения на интегратор 14 подается напряжение, пропорциональное моменту сопротивления диссипативных сил ведущих частей коробки передач. Причем это напряже3
нне за счет мостового выпрямителя 1 всегда противоположно по знаку т.е. оно всегда является тормозным для интегратора 14.
В режиме включенной передачи в датчике 23 положения рычага переключения передач, состоящем и5 группы выключателей, включен выключатель соответствующей передачи, например первый. Сигналом с этого выключате- ля замыкаются соответствующие коммутационные пары коммутаторов 17 и 22 подключая соответствующие входы суммирующего интегратора 18 и сумматора 22.
Напряжение с выхода интегратора 18 через замкнутую пару коммутатора 22 подается на соответствующий вход сумматора 24, коэффиднент передачи данного сумматора по каждому входу определяет передаточное число коробки передач по моменту.
На выходе сумматора 24 формируется напряжение, пропорциональное iMy , которое затем подается на со- ответствующий вход суммирующего интегратора 25. На ;выходе последнего появляется напряжение , пропорциональное оборотам выходного вала коробки передач и ведомым частям ко- робки передач, а постоянная времени интегратора 25 определяет их момент инерции.
На другой вход интегратора 25 через мостовой выпрямитель 26 с источника разнополярного напряжения подается напряжение, пропорциональное моменту сопротивления диссипатив- ных сил ведомых частей коробки передач. Причем это напряжение за счет мостового выпрямителя всегда противоположно по знаку напряжению iM, т.е. оно всегда является тормозным для интегратора 25.
Напряжение U,j через замкнутую пару коммутатора 17 поступает на соответствующий вход суммирующего интегратора 18. Масштабирующий резистор по каждому входу интегратора 18 определяет передаточное число ко- робки передач, т.е. iw .
При достижении равенства U iUj процесс разгона прекращается и насту
пает установившийся режим.
В режиме заднего хода устройство работает так же, как и в режиме передач, переднего хода, с тем отличием, что напряжение выхода интеграто
5 10 5
20
25 о
Q
g
5
5
154
ра I с помощ.ью коммутатора 6 подключается к интегратору 8 через инвертор 5. В результате напряжение на выходе интегратора 25 становится противоположным по знаку напряжению при включении передач переднего хода.
При переходе с нижней передачи на высшую и наоборот включение передач происходит через синхронизаторы передач. Это связано с тем, что веду- щие части коробки передач с включаемой шестерней и ведомые части коробки передач с ведомым валом вращаются -G. разными угловыми скоростями.
Синхронизаторы позволяют уравнять обороты ведущих и ведомых частей коробки передач при включетш соответствующей передачи и тем самым предотвратить превышение допустимых оборотов двигателя и допустимых механических нагрузок в коробке передач.
Выравнивание оборотов ведущих и ведомых частей коробки передач происходит за счет силы трения, возни- кшощей при подсоединении синхронизатора к шестерне включенной передачи, вращающихся с разными угловыми скоростями. Как только обороты включаемой шестерни и синхронизатора, жестко связанного с выходньм валом коробки передач выравняются, сила трения-скольжения прекрая(ает свое действие и происходит жесткое сцепление шестерни включаемой передачи с выходным валом коробки передач.
Моделирование работы синхронизаторов производится следующим образом.
На механизме переключения передач установлены выключатели первого датчика 20 положения рычага переключения передач, которые включаются в начале хода рычага при включении соответствующих передач.
Пусть, например, нужно переключиться с нюкней передачи на высшую: с первой на вторую. Водитель сбрасывает газ, выжимает педаль фрикциона и вьшодит рычаг переключения передач из зацепления. При выжатой педали фрикциона напряжение на датчике 9 становится равным О и напряжение на выходе ограничителя 11 ограничивается до О, т.е. происходит расцепление ведущих и ведомых частей фрикциона. Кинематически связанный с рычагом переключения передач выключатель выключаемой передачи датчика 23 отключается к размыкает коммутационные сети коммутаторов 17 и 22.
Напряжения, на выходах интеграторов 14 и 25 начинают постоянно уменьшаться, т.е. происходит вращение ведущих и. ведомых частей коробки передач по инерции. Торможение осуществляется за Счет воздействия диссиДа- тивных сил сопротивления с мостовых выпрямителей 13 и 26.
Водитель, выводя рычаг п ереключеИсгюлнительный блок 2, выполняемый в виде, например, электромагнита срабатывает, и его якорь при включении препятствует дальнейшему передви жению рычага переключения передач.
Напряжение, пропорциональное силе трения-скольжения и ограниченное ограничителем 10 до определенного уров ня, поступает одновременно на соотния передач из зацепления, вводит его ю ветствующие входы интеграторов 14 и в зацепление следующей передачи. При 25. Поскольку ведущие части коробки
этом срабатывает механически связанный с этой передачей выключатель датчика 20 положения рычага переключения передач. Сигналом с последнего замыкается соответствующая коммута-. ционная пара включаемой передачи коммутатора 15, и одновременно схё- ма ШШ 21 включает коммутатор 27. На вход сумматора 16 подаются напряжения ; и Ujj , соответственно пропорциональные оборотам ведущих и ведомых частей коробки передач.
Поскольку водитель переключает передачу с нижней на высшую, шестерня включаемой передачи (последняя находится в постоянном зацеплении с ведущими частями коробки передач) вращается быстрее, чем ведомы.е части и связанньй с ними выходной вал коробки передач.
Между конусом включаемой передачи и конусом синхронизатора возникает разность оборотов, т.е. на выходе
сумматора 16 формируется напряжение, , рычаг переключения передач.
45
пропорциональное разнице угловых скоростей включаемой шестерни и конуса синхронизатора. Это напряжение поступает на вход интегратора 12, на выходе которого формируется напряже- Q ние, пропорциональное силе трения- скольжения, возникающей между конусами включаемой шестерни и синхронизатора.
Одновременно это напряжение поступает на вход блока 7 выделения модуля. На выходе последнего- независимо от полярности входных сигналов формируется сигнал одной полярности. С выхода блока 7 выделения модуля напряжение одной полярности подается на вход сравнивающего устройства 4, представляющего собой нуль-орган. Сравнивающее устройство срабатывает, и на его выходе появляется сигнал, который усиливается .усилителем 3 и поступает на вход исполнительного блока 2.
тель может передвинуть его д чения выключателя датчика 23 ветствующей передачи (в данн чае второй) .
.При переходе с высшей пер на низшую, например с третье вторую, процесс аналогичен о му. На выходе сумматора 16 в напряжение, пропорциональное ти оборотов ведущих и ведомы коробки передач. Полярность напряжения противоположна по напряжения, которое образует переходе с низшей передачи В этом случае напряжение с в интегратора 12 заряжает инте 14, раскручивая ведущие част ки передач и включаемую шест ее интегратор 25 разряжается, т ,исходит процесс торможения в частей вместе с выходным вал робки передач.
50
Исгюлнительный блок 2, выполняемый в виде, например, электромагнита, срабатывает, и его якорь при включении препятствует дальнейшему передвижению рычага переключения передач.
Напряжение, пропорциональное силе трения-скольжения и ограниченное ограничителем 10 до определенного уровня, поступает одновременно на соотпередач вращаются быстрее, напряжение, приходящее на вход интегратора 14, разряжает его, т.е. происходит 5 торможение ведущих частей коробки передач и вместе с ними включаемой шестерни.
Напряжение, приходящее на вход интегратора 25, заряжает его, и про- Q исходит процесс разгона ведомых частей и вместе с ними выходного вала коробки передач.
Процесс разряда интегратора 14 и заряда интегратора 25 происходит до тех пор, пока, напряжение на выходе сумматора 16 не станет равным О, т.е. происходит процесс выравнивания оборотов ведущих и ведомых частей коробки передач.
В этом случае напряжение на валу блока 7 становится равным О, а сравнивающее устройство 4 через усилитель 3 отключает исполнительный блок 2. Последний разблокировывает
5
0
рычаг переключения передач.
и водитель может передвинуть его до включения выключателя датчика 23 соответствующей передачи (в данном случае второй) .
.При переходе с высшей передачи на низшую, например с третьей на вторую, процесс аналогичен описанному. На выходе сумматора 16 возникает напряжение, пропорциональное разности оборотов ведущих и ведомых частей коробки передач. Полярность этого напряжения противоположна полярности напряжения, которое образуется при , переходе с низшей передачи на высшую. В этом случае напряжение с выхода интегратора 12 заряжает интегратор 14, раскручивая ведущие части коробки передач и включаемую шестерню, п интегратор 25 разряжается, т.е. пр ,исходит процесс торможения ведомых частей вместе с выходным валом коробки передач.
Пля ускорения процесса переключения с высшей передачи на низшую можно моделировать режим перегазов- ки. Он заключается в следующем. Ведущие части коробки при переключении на низшую передачу вращаются медленнее и тормозятся быстрее, поскольку их масса в момент инерции меньше, чем у ведомых частей коробки передач
Для того, чтобы раскрутить ведущие части и включаемую шестерню коробки до оборотов, больших или равных оборотам ведомых частей коробки передач, водитель отпускает педаль фрикциона и нажимает на педаль газа, В этом случае ограничитель 11 открывается и на вход интегратора 14
которое
M-VI его, т.е. происходит процес
поступает напряжение U, заряжает и,
раскрутки включаемой шестерни до оборотов, равных оборотам ведомых часте коробки передач.
Таким образом, устройство позволяет воспроизводить работу ведомых и ведущих частей коробки передач и более точно моделировать процесс работы механических синхронизаторов при переключении передач.
(формула изобретения
Устройство для моделирования механической передачи, содержащее первый коммутатор, последовательно соединенные схему сравнения, усилитель и исполнительный блок, первый и второй сумматоры, второй коммутатор, первый и второй датчики положения рычага переключения передач, входы которых подключены к источнику постоянного напряжения, третий, четвертый и пятый коммутаторы, первый, второй и третий суммирующие интеграторы, первый инвертор, первый ограничитель напряжения, выходы первого датчика положения рычага переключения .передач, подключены к соответствующим управляющим входам второго коммутатора выход которого подключен к соответствующим входам первого сумматора, одноименные управляющие входы третьего и четвертого коммутаторов соединены и подключены соответственно к выходам второго датчика рычага переключения передач, датчик напряжения фрикциона, выходы которо- го соединены соответственно с первым и вторым входами задания уровня ограничения первого ограничителя на
10
15
20
25
35
40
5
2545158
пряжения, информационный вход которого подключен к выходу второго суммирующего интегратора, а выход - к первым входам первого суммирующего интегратора, второй вход которого является входом устройства, выход первого суммирующего интегратора соединен с входом первого инвертора и первым информационным входом пятого коммутатора, второй информацион- ньш вход и выход которого соответственно соединены с выходом первого инвертора и первым входом второго суммирующего интегратора, управляющий вход пятого коммутатора соединен с соответствующим выходом второго датчика положения рычага переключения передач, входы второго сумматора подключены соответственно к выходам четвертого коммутатора, а его выход соединен с первым входом третьего суммирующего интегратора, первый мостовой выпрямитель, одна пара противоположных вершин которого соединена с вторым входом и выходом третьего суммирующего интегратора,выход которого соединен с информационными входами третьего коммутатора, другая пара противоположных вершин первого мостового выпрямителя через ограничивающие резисторы подключена к источнику разнополярного напряжения, отличающее ся тем, что, с целью расширения функцио- нальных возможностей путем воспроизведения влияния синхронизаторов на работу коробки передач, оно дополнительно содержит четвертый, пятьш и шестой суммирующие интеграторы, элемент ИЛИ, второй инвертор, второй ограничитель напряжения, блок выделения модуля, второй мостовой выпрямитель, первый вход и выход четвертого суммирующего интегратора соединены с противоположными вершинами второго мостового выпрямителя, две другие вершины которого через ограничивающие резисторы подключены к источнику разнополярного напряжения, второй вход четвертого суммирующего интегратора соединен с выходом первого ограничителя напряжения, первый информационный вход пятого суммирующего интегратора соединен с выходом четвертого суммирующего интегратора, вторым информационным входом второго суммирующего интегратора и информационными входами второго коммутатора, выход второго инвертора подклю30
45
50
чён к третьему информационному входу четвертого суммирующего интегратора, а вход второго инвертора соединен с выходом пятого суммирующего интегратора и информационными входами чёт- вертого коммутатора, второй, третий и четвертый информационные входы пятого суммирующего интегратора соединены соответственно с выходами третьего коммутатора, входы элемента ИЛИ подключены соответственно к выходам первого датчика положения рычага переключения передач, а вь±од элемента ИЛИ соединен с управляющим входом первого коммутатора, выход которого соединен с соответствующим входом первого .сумматора, а информационный вход первого коммутатора подключен к выходу третьего суммирую1510
щего интегратора, первый вход и выход шестого суммирующего интегратора соответственно подключены к выходу и информационному входу второго ограничителя напряжения, управляющие входы которого через ограничивающие резисторы соединены с источником разнополярного напряжения, второй информационный вход шестого суммирующего интегратора подключен к выходу первого сумматора, выход шестого интегратора соединен с третьим информационным входом третьего суммирующего интегратора и четвертым инфор- мационньм входом четвертого суммирующего интегратора, выход первого сумматора соединен с входом блока выделения модуля, выход которого подключен к входу схемы сравнения.
Редактор А. Огар
Составитель В. Фукалов
Техред И.Попович Корректор Е.Сирохман
Заказ 4723/54 Тираж 671. . Подписное ВНРШПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования механической передачи | 1982 |
|
SU1091192A2 |
| Устройство для моделирования механической передачи | 1981 |
|
SU1001124A1 |
| Устройство для моделирования механической передачи | 1984 |
|
SU1196912A2 |
| Устройство для моделирования динамики движения гусеничной машины | 1980 |
|
SU940186A2 |
| Устройство для моделирования механической передачи | 1982 |
|
SU1068953A1 |
| Устройство для моделирования механической передачи | 1981 |
|
SU982032A2 |
| Устройство для моделирования механической передачи | 1983 |
|
SU1180932A1 |
| Устройство для моделирования механической передачи | 1980 |
|
SU960862A2 |
| Устройство для моделирования механической передачи | 1979 |
|
SU864306A1 |
| Кинотренажер водителя гусеничной машины | 1987 |
|
SU1531707A1 |
Изобретение относится к области аналого-вычислительной техники и предназначено для использования в тренажерах транспортных средств. Цель изобретения - расширение функциональных возможностей путем воспроизведения влияния синхронизаторов на работу коробки передач. УстроУ1ст- во содержит суммирующие интеграторм, исполнительный блок, усилитель, схему сравнения-, инверторы, коммутаторы, блок вьщеления модуля, датчик напряжения фрикциона, ограничители напряжения, мостовые выпрямители, сумматоры, датчики положения рычага переключения передач, элемент ИЛИ, резисторы и диоды. 1 ил. с S ю Сгв 4 сл ел
| Стабилизатор постоянного тока | 1982 |
|
SU1061124A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
